|
|
|
| Mechanical design of bed-type gait rehabilitation training system |
Wei-da LI( ),Zhu WANG(),Hong-miao ZHANG,Juan LI,Hong GU ),Zhu WANG(),Hong-miao ZHANG,Juan LI,Hong GU |
| Jiangsu Provincial Key Laboratory of Advanced Robotics, School of Mechanical and Electrical Engineering, Soochow University, Suzhou 215021, China |
|
|
|
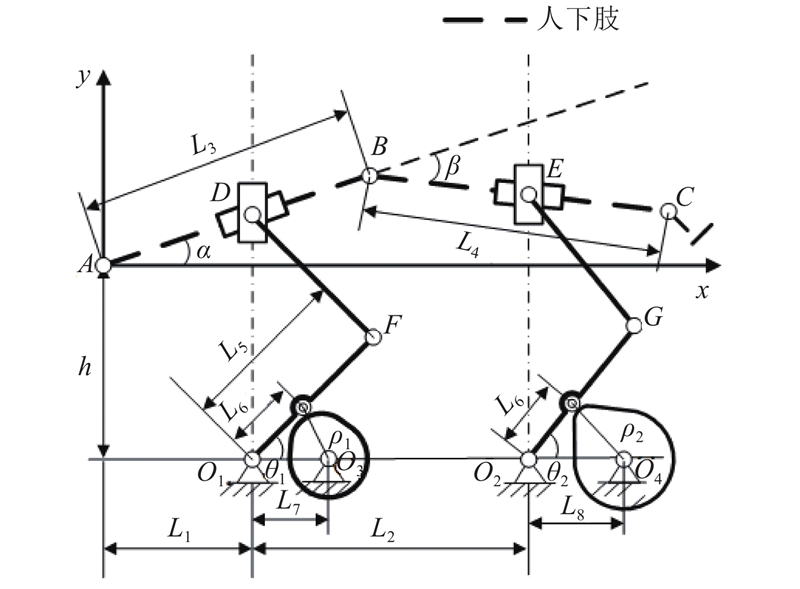
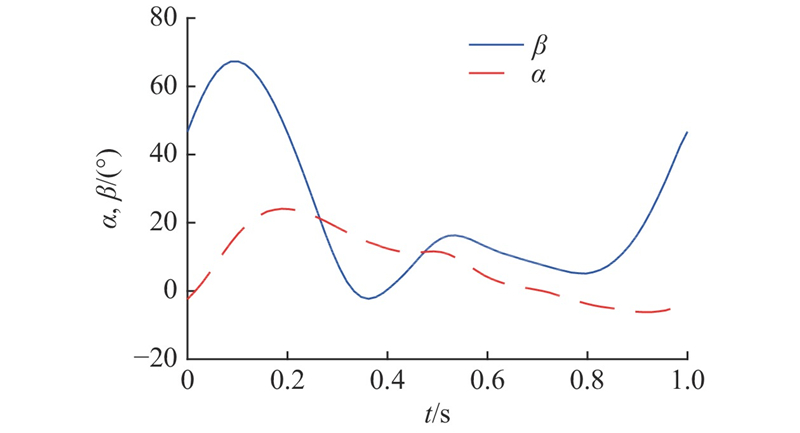
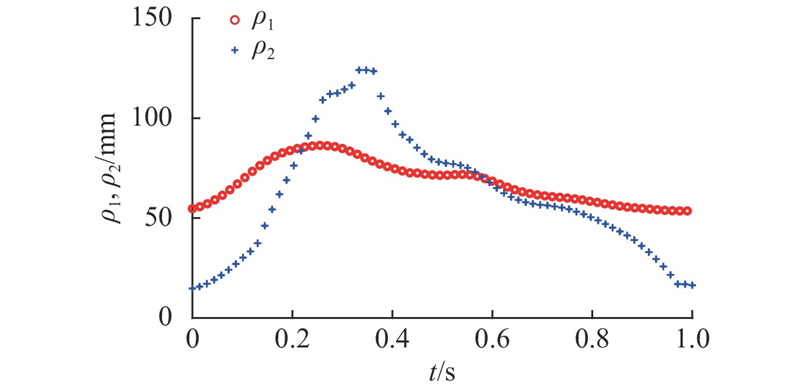
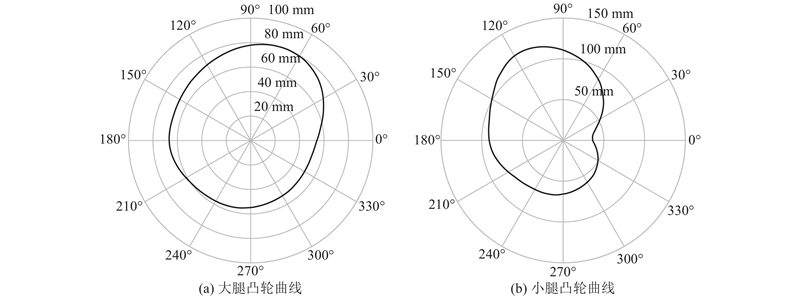
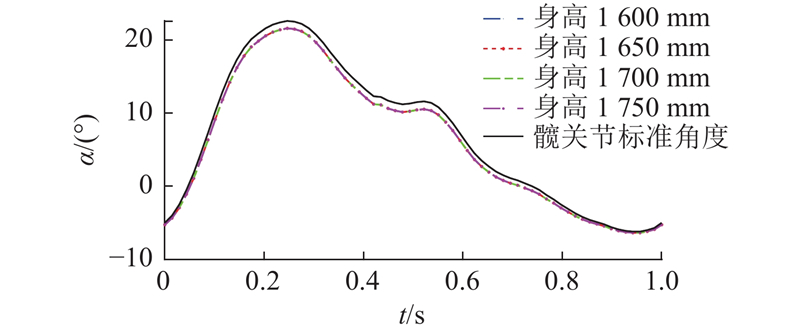
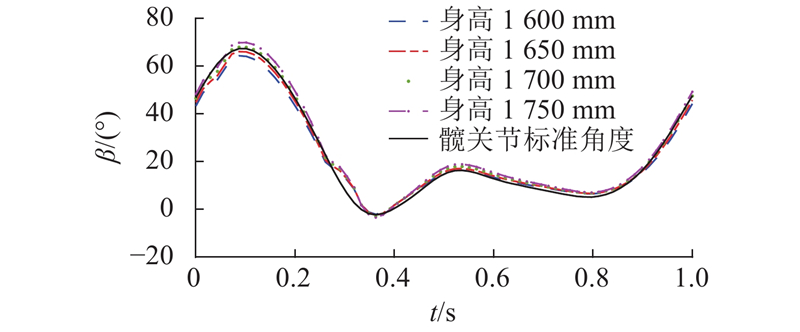
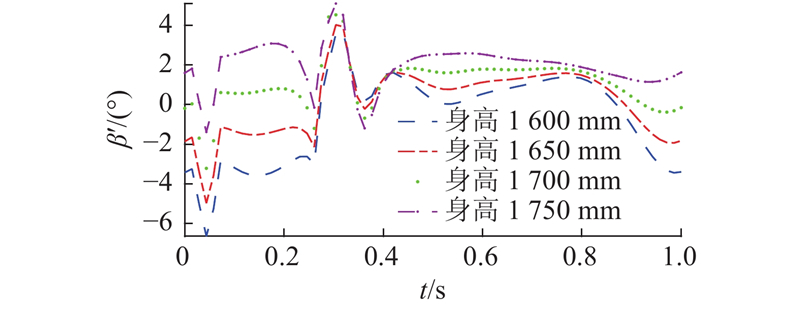
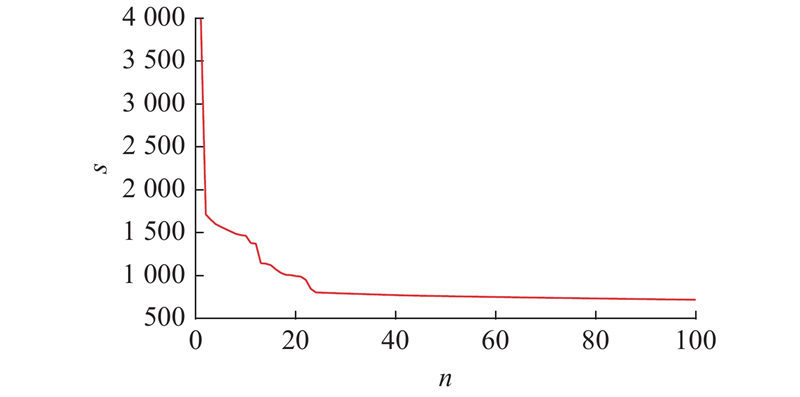
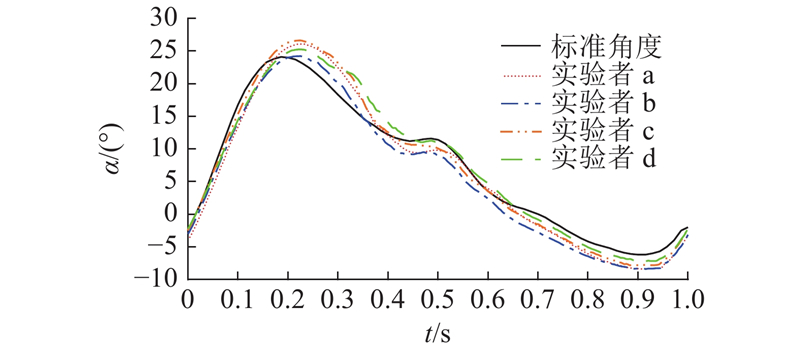
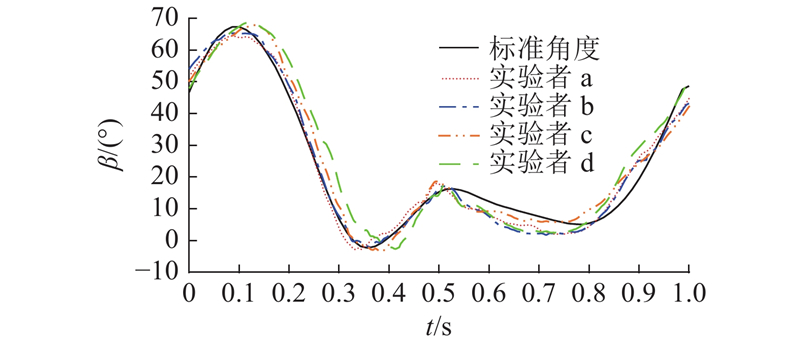
Abstract A modular bed-type gait rehabilitation training system was proposed aiming at the problem of inconvenience and high cost of existing rehabilitation training robot. The system consists of a bed with adjustable tilt angle, two leg motion auxiliary mechanisms and a foot support mechanism. The modular design can make it easier to use. Cam-connecting rod mechanism was used to simulate the movements of thigh and calf in order to generate normal walking gait. A human-machine coupling model was built and the kinematic analysis was carried out. The kinematic relationship between the mechanism and human lower limbs was obtained as the basis of parameter optimization and structural design. MATLAB was used to optimize the parameters of the model and get their optimal values, aiming at increasing adaptability of the mechanism to the patients with different body types. Experimental results showed that the maximum error of hip angle between the measured result and the standard result was less than 5.2°, the maximum error of knee angle was less than 6.7°, which demonstrated that the presented mechanism can adapt personal difference and it’s feasible to carry out rehabilitation training with this system.
|
|
Received: 11 May 2020
Published: 10 June 2021
|
|
|
| Fund: 国家重点研发计划资助项目(2018YFC2001304) |
床式步态康复训练系统机构设计
针对现有床式步态康复训练机器人使用不便、成本高昂的问题,提出模块化的床式步态康复训练系统. 包括倾角可调的床体模块、腿部运动辅助机构模块和足底支撑机构模块,模块化设计可以提高其使用方便性,降低制造和使用成本. 为了实现正常的行走步态,腿部运动辅助机构模块采用凸轮-连杆机构模拟大腿和小腿的运动. 建立腿部运动辅助机构的人机耦合模型,并对其进行运动学分析,得到机构与人体下肢的运动学关系,将其作为参数优化和结构设计的基础. 利用MATLAB,以机构对患者个体差异的适应性为目标,对模型中的各参数进行优化,得到一组机构参数的最优解. 实验结果表明,不同身高的实验者髋关节测量角度与标准角度的最大误差不超过5.2°,膝关节最大误差不超过6.7°,验证了机构对实验者个体差异的适应性和使用此系统进行康复训练的可行性.
关键词:
康复机器人,
步态训练,
运动学分析,
参数优化,
模块化设计
|
|
| [1] |
GBD 2016 Neurology Collaborators Global, regional, and national burden of traumatic brain injury and spinal cord injury, 1990-2016: a systematic analysis for the global burden of disease study 2016[J]. The Lancet Neurology, 2019, 18 (1): 56- 87
doi: 10.1016/S1474-4422(18)30415-0
|
|
|
| [2] |
张安仁, 冯晓东. 临床康复学[M]. 北京: 人民卫生出版社, 2018: 73-74.
|
|
|
| [3] |
解海霞, 苌凤水, 沈雪韵, 等 上海脊髓损伤者“中途之家”机构康复训练效果初步评价[J]. 中国康复医学杂志, 2018, 33 (9): 1087- 1091
XIE Hai-xia, CHANG Feng-shui, SHEN Xue-yun, et al Preliminary evaluation of rehabilitation training effect of “half way” institution for spinal cord injury patients in Shanghai[J]. Chinese Journal of Rehabilitation Medicine, 2018, 33 (9): 1087- 1091
|
|
|
| [4] |
MARIANNE S L, CARMEN K, FRIEDEMANN M, et al Comparison of orthostatic reactions of patients still unconscious within the first three months of brain injury on a tilt table with and without integrated stepping[J]. Clinical Rehabilitation, 2008, 22: 1034- 1041
doi: 10.1177/0269215508092821
|
|
|
| [5] |
山中 太 下肢用リハビリ装置LR2[J]. 日本機械学会誌, 2016, 119 (1166): 25
SHAN Zhong-tai Lower limb rehabilitation training device LR2[J]. Japan Journal of Mechanical Engineers, 2016, 119 (1166): 25
|
|
|
| [6] |
靳振楠. 空间四自由度下肢康复机器人设计与分析[D]. 秦皇岛: 燕山大学, 2019.
JIN Zhen-nan. Design and analysis of the spatial four-degree-of-freedom lower limb rehabilitation robot[D]. Qinhuangdao: Yanshan University, 2019.
|
|
|
| [7] |
SUN H, ZHANG L, LI C. Dynamic analysis of horizontal lower limbs rehabilitative robot[C]// IEEE International Conference on Intelligent Computing and Intelligent Systems. 2009: 656-660.
|
|
|
| [8] |
AKDOGAN E, ANDI M A The design and control of a therapeutic exercise robot for lower limb rehabilitation: physiotherabot[J]. Mechatronics, 2011, 21 (3): 509- 522
doi: 10.1016/j.mechatronics.2011.01.005
|
|
|
| [9] |
KOUKOLOVA I L Overview of the robotic rehabilitation systems for lower limb rehabilitation[J]. Transfer Inovácií, 2015, (31): 107- 111
|
|
|
| [10] |
闫鹏飞. 基于人体动力学分析的下肢运动康复训练机构研究[D]. 长春: 吉林大学, 2017.
YAN Peng-fei. Design of lower extremity motion rehabilitation training mechanism based on the analysis of human body dynamics[D]. Changchun: Jilin University, 2017.
|
|
|
| [11] |
CHISHOLM K J, KLUMPER K, MULLINS A, et al A task oriented haptic gait rehabilitation robot[J]. Mechatronics, 2014, 24 (8): 1083- 1091
doi: 10.1016/j.mechatronics.2014.07.001
|
|
|
| [12] |
WANG H, FENG Y, YU H, et al. Mechanical design and trajectory planning of a lower limb rehabilitation robot with a variable workspace[C]// International Journal of Advanced Robotic Systems, 2018, 15(3): 1-13.
|
|
|
| [13] |
冯永飞. 坐卧式下肢康复机器人机构设计与协调控制研究[D]. 秦皇岛: 燕山大学, 2018.
FENG Yong-fei. Research on mechanism design and cooperative control strategy of sitting/lying lower limb rehabilitation robot[D]. Qinhuangdao: Yanshan University, 2018.
|
|
|
| [14] |
孙红伟. 起立床式下肢外骨骼机器人[D]. 上海: 上海交通大学, 2012.
SUN Hong-wei. Research on the lying lower limbs exoskeleton rehabilitation robot[D]. Shanghai: Shanghai Jiao Tong University, 2012.
|
|
|
| [15] |
吴金玲, 石秀秀, 杜宁 低温热塑板对踝关节僵硬康复治疗的临床应用[J]. 北京医学, 2020, 42 (1): 70- 72
WU Jin-ling, SHI Xiu-xiu, DU Ning, et al Clinical application of thermoplastic plate in rehabilitation of ankle joint stiffness[J]. Beijing Medical Journal, 2020, 42 (1): 70- 72
|
|
|
| [16] |
边斋 中国人身高百年增长10厘米[J]. 教育世界, 2016, 16 (1): 75
BIAN Zhai Chinese people have grown in height by 10 cm in 100 years[J]. Education World, 2016, 16 (1): 75
|
|
|
| [17] |
呼慧敏, 晁储芝, 赵朝义, 等 中国成年人人体尺寸数据相关性研究[J]. 人类工效学, 2014, 20 (3): 49- 53
HU Hui-min, CHAO Chu-zhi, ZHAO Chao-yi, et al Correlation study on human body size data of Chinese adults[J]. Chinese Journal of Ergonomics, 2014, 20 (3): 49- 53
|
|
|
| [18] |
肖慧 中国成年人人体质心的研究[J]. 人类工效学, 1998, 4 (3): 4- 11
XIOA Hui A study on the centroid of Chinese adults[J]. Chinese Journal of Ergonomics, 1998, 4 (3): 4- 11
|
|
|
| [19] |
CHRIS K. CGA normative gait database [EB/OL]. [2017-05-25]. http://www.clinicalgaitanalysis.com.
|
|
|
| [20] |
夏子玉. 基于惯性传感器的假肢臂控制方法研究[D]. 苏州: 苏州大学, 2019.
XIA Zi-yu. Research on the control method of prosthetic arm based on inertial sensors[D]. Suzhou: Soochow University, 2019.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|