|
|
|
| Design of AGV motion control system based on model reference adaptive method |
Hui GONG1( ),Qiang FANG2,*(),Guo-qiang LI1,Xiao-feng ZHENG1,Yong-ren ZHU1 ),Qiang FANG2,*(),Guo-qiang LI1,Xiao-feng ZHENG1,Yong-ren ZHU1 |
1. School of Intelligent Manufacturing, Zhejiang Institute of Mechanical and Electrical Engineering, Hangzhou 310053, China
2. State Key Laboratory of Fluid Power Transmission and Control, Zhejiang University, Hangzhou 310027, China |
|
|
|
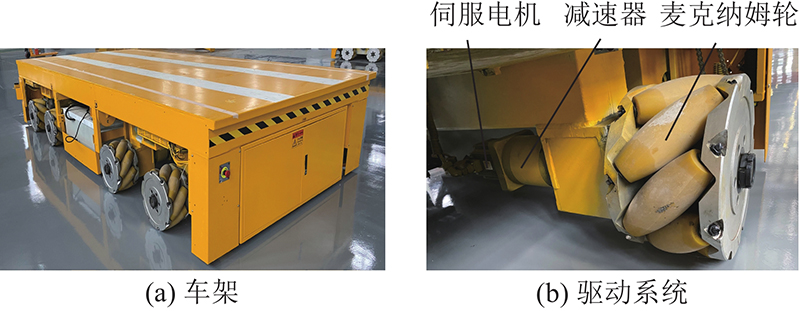
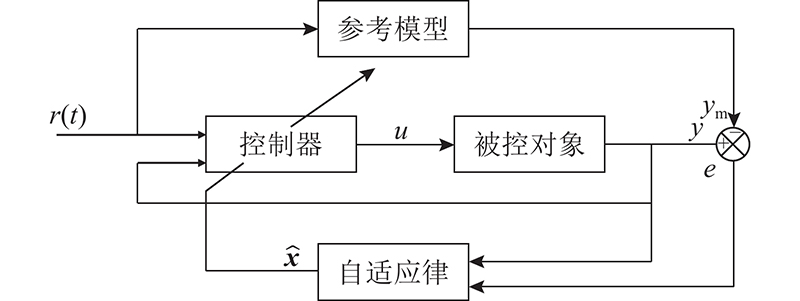
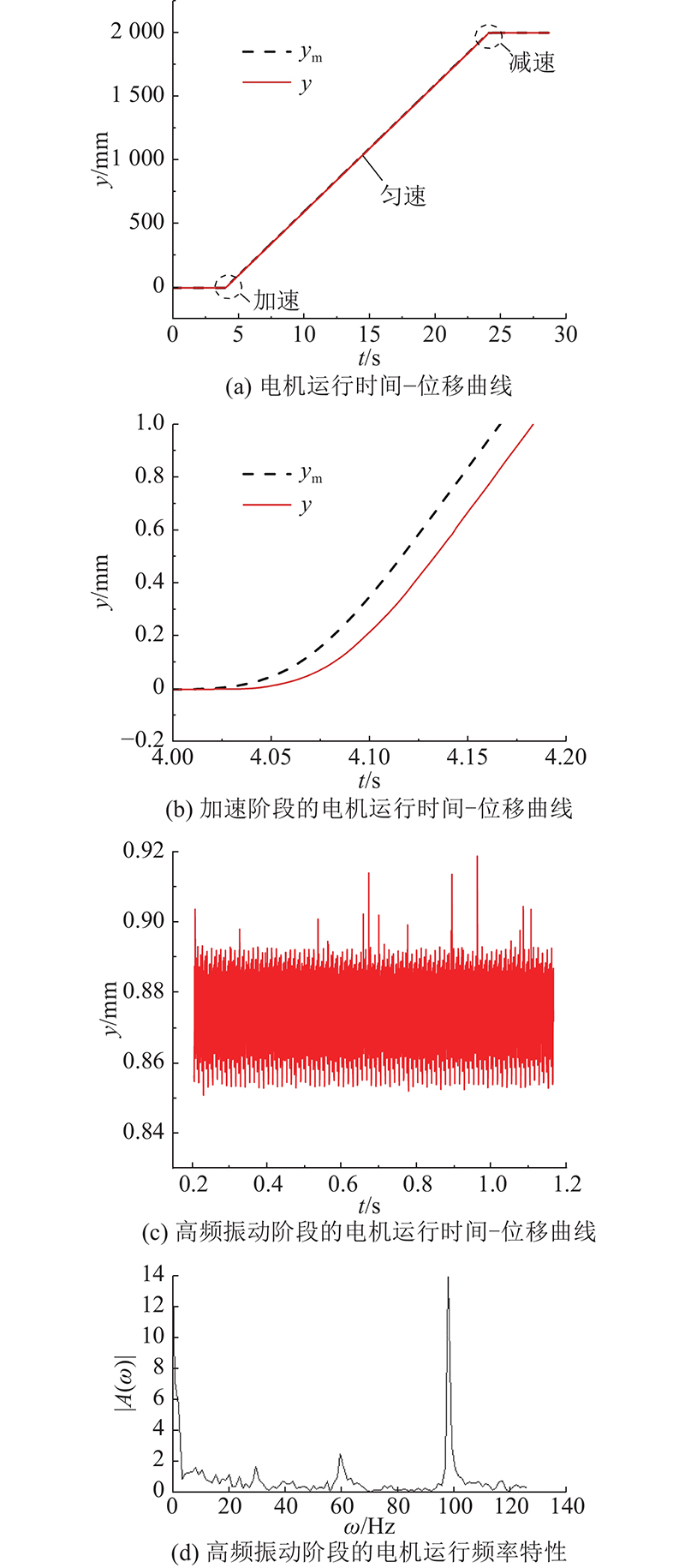
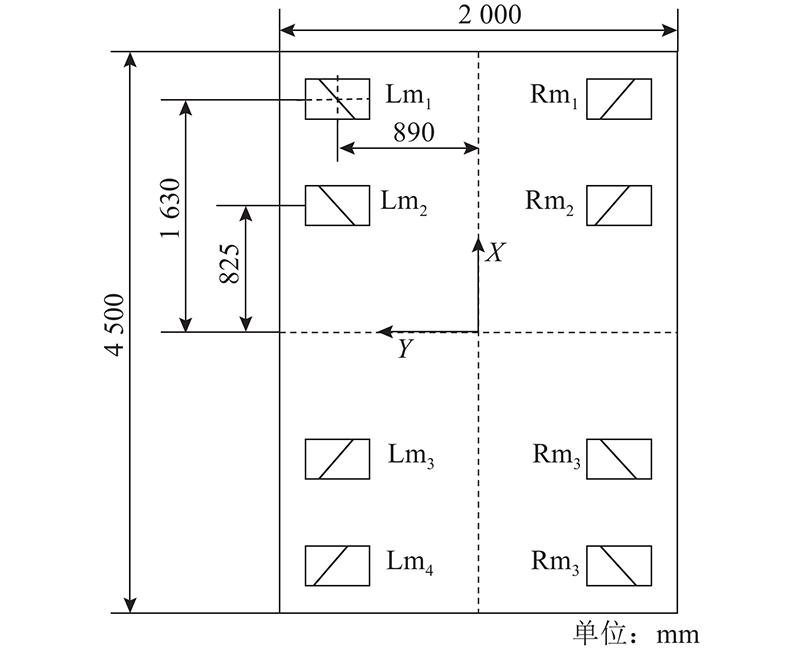
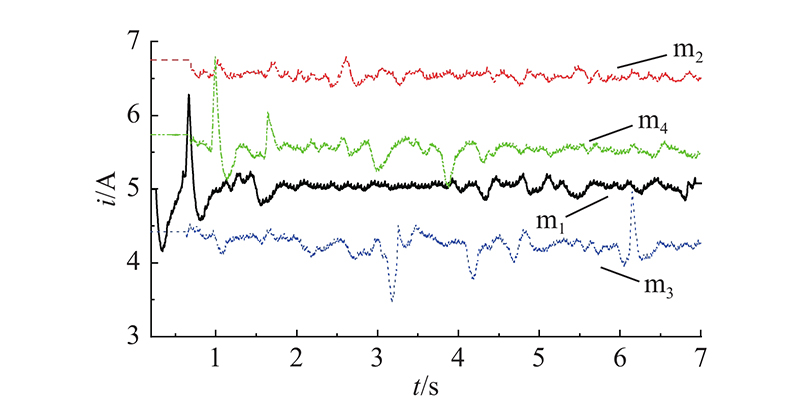
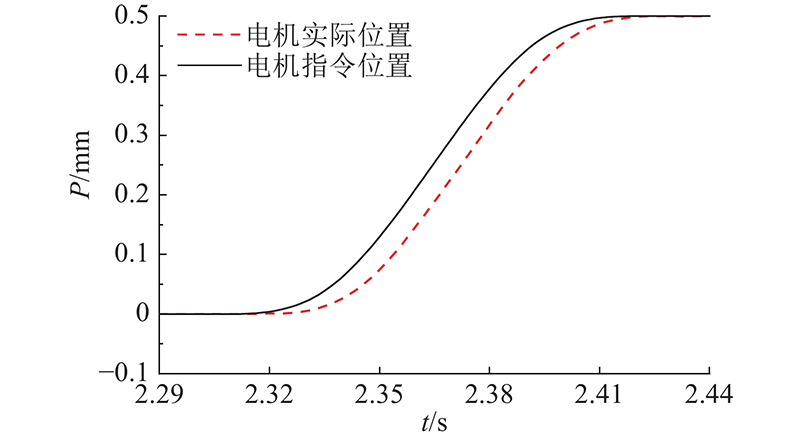
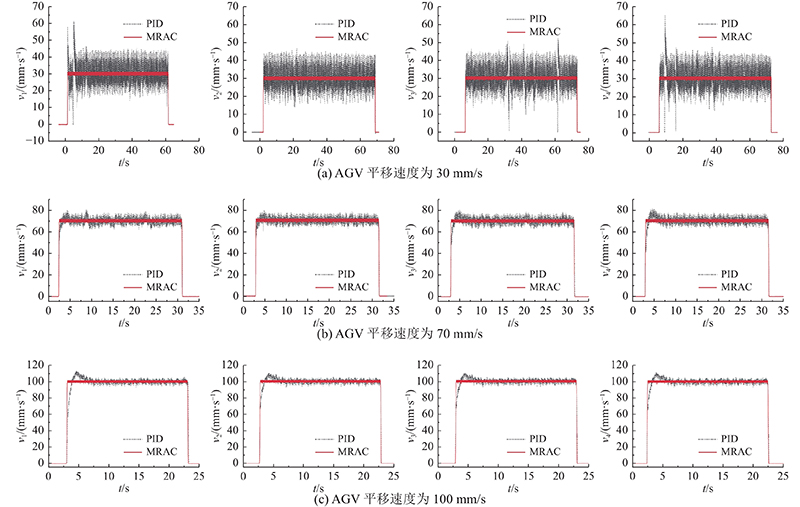
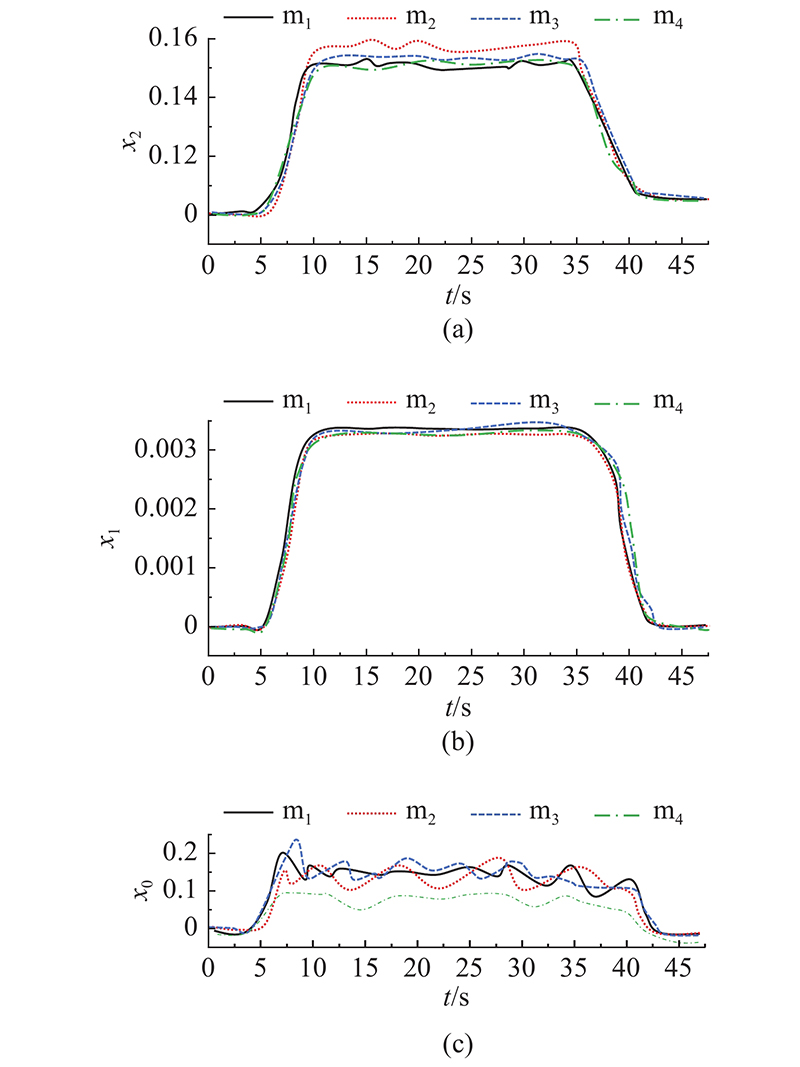
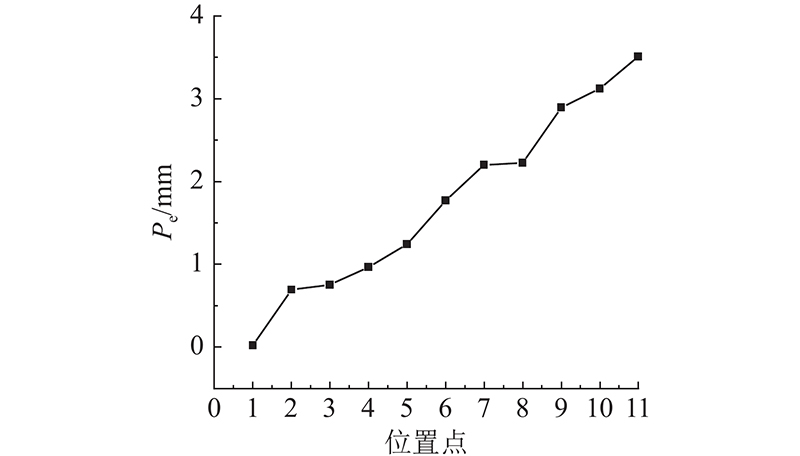
Abstract A servo control method based on model reference adaptive control (MRAC) was proposed, to eliminate the control system uncertainty which was caused by the unbalanced load between the Mecanum wheels of the automated guided vehicle (AGV) system. The mathematical model of the driving wheel servo motor was established. The control law and adaptive law of MRAC were acquired by Lyapunov method, and the positive definite matrix of the adaptive law was determined. According to the frequency characteristics of the servo motor during the operation of the AGV, a low-pass filter was introduced. The cut-off frequency of the second-order Butterworth low-pass filter was determined by the positioning accuracy of the AGV and the stability of the MRAC system. The high frequency oscillation of the control system was effectively suppressed and the high steady-state accuracy was achieved. Experimental results show that the control performance of the AGV based on MRAC achieves a high stability under complex working conditions. The speed error of each motor is controlled within 3%, and the positioning accuracy error is less than 3.6 mm.
|
|
Received: 23 September 2021
Published: 28 September 2022
|
|
|
| Fund: 国家自然科学基金资助项目(51975519); 浙江机电职业技术学院2021年度校级科教融合孵化课题(A-0271-21-016) |
|
Corresponding Authors:
Qiang FANG
E-mail: gonghui@zime.edu.cn;fangqiang@zju.edu.cn
|
基于模型参考自适应的AGV运动控制系统设计
为了消除自动导航车(AGV)麦克纳姆驱动轮间负载不均衡引起的控制系统不确定性问题,提出基于模型参考自适应控制(MRAC)的伺服控制方法. 建立驱动轮伺服电机的数学模型,根据李雅普诺夫稳定理论求解MRAC控制律和自适应律,并确定自适应律算法的正定矩阵. 根据AGV实际运行过程中伺服电机的频率特性,引入低通滤波器. 综合AGV定位精度和MRAC系统稳定性,确定二阶巴特沃兹低通滤波器的截止频率. 在保证控制系统稳态精度的同时,有效抑制高频振荡. 实验结果表明:基于MRAC的AGV在复杂工况下的控制性能保持了较高的稳定性,每个电机的速度波动不超过3%,定位精度误差小于3.6 mm.
关键词:
自动导航车(AGV),
麦克纳姆轮,
模型参考自适应控制(MRAC),
低通滤波器
|
|
| [1] |
朱磊磊, 陈军 轮式移动机器人研究综述[J]. 机床与液压, 2009, 37 (8): 242- 247
ZHU Lei-lei, CHEN Jun A review of wheeled mobile robots[J]. Machine Tool and Hydraulics, 2009, 37 (8): 242- 247
doi: 10.3969/j.issn.1001-3881.2009.08.079
|
|
|
| [2] |
YOON S W, PARK S B, KIM J S, et al Kalman filter sensor fusion for Mecanum wheeled automated guided vehicle localization[J]. Journal of Sensors, 2015, 347379
|
|
|
| [3] |
王明明, 朱莹莹, 张磊, 等 麦克纳姆轮驱动的移动机器人自适应滑模控制器设计[J]. 西北工业大学学报, 2018, 36 (4): 627- 635
WANG Ming-ming, ZHU Ying-ying, ZHANG Lei, et al Design of adaptive sliding mode controller for mobile robot driven by Mecanum[J]. Journal of Northwestern Polytechnical University, 2018, 36 (4): 627- 635
doi: 10.3969/j.issn.1000-2758.2018.04.004
|
|
|
| [4] |
KIM J M, WOO S B, KIM J Y, et al Inertial navigation system for an automatic guided vehicle with Mecanum wheels[J]. International Journal of Precision Engineering and manufacturing, 2012, 13 (3): 379- 386
doi: 10.1007/s12541-012-0048-9
|
|
|
| [5] |
GFRERRER A Geometry and kinematics of the Mecanum wheel[J]. Computer Aided Geometric Design, 2008, 25 (9): 784- 791
doi: 10.1016/j.cagd.2008.07.008
|
|
|
| [6] |
张星. 基于麦克纳姆轮的全向AGV运动控制技术研究[D]. 重庆: 重庆大学, 2016: 5-6.
ZHANG Xing. Research on omnidirectional AGV motion control technology based on Mecanum wheel [D]. Chongqing: Chongqing University, 2016: 5-6.
|
|
|
| [7] |
郑炳坤, 赖乙宗, 叶峰 磁导航AGV控制系统的设计与实现[J]. 自动化与仪表, 2014, 29 (3): 6- 10
ZHENG Bing-kun, LAI Yi-zong, YE Feng Design and implementation of the magnetic navigation AGV control system[J]. Automation and Instrumentation, 2014, 29 (3): 6- 10
doi: 10.3969/j.issn.1001-9944.2014.03.002
|
|
|
| [8] |
DOUDOU S, KHABER F Robust adaptive fuzzy control for a class of uncertain nonaffine nonlinear systems with unknown control directions[J]. Transactions of the Institute of Measurement and Control, 2021, 43 (14): 3103- 3119
doi: 10.1177/01423312211015114
|
|
|
| [9] |
刘国荣 模型参考模糊自适应控制[J]. 控制理论与应用, 1996, 13 (1): 92- 97
LIU Guo-rong Model reference fuzzy adaptive control[J]. Control Theory and Applications, 1996, 13 (1): 92- 97
|
|
|
| [10] |
张兴华 永磁同步电机的模型参考自适应反步控制[J]. 控制与决策, 2008, 23 (3): 341- 345
ZHANG Xing-hua Model reference adaptive backstepping control of permanent magnet synchronous motors[J]. Control and Decision, 2008, 23 (3): 341- 345
doi: 10.3321/j.issn:1001-0920.2008.03.022
|
|
|
| [11] |
GAO Q Z, XIE X J Robustness analysis of discrete-time indirect model reference adaptive control with normalized adaptive laws[J]. International Journal of Automation and Computing, 2010, 7 (3): 381- 388
doi: 10.1007/s11633-010-0518-4
|
|
|
| [12] |
PIIPPO A, HINKKANEN M, LUOMI J Analysis of an adaptive observer for sensorless control of interior permanent magnet synchronous motors[J]. IEEE Transactions on Industrial Electronics, 2008, 55 (2): 570- 576
doi: 10.1109/TIE.2007.911949
|
|
|
| [13] |
王庆龙, 张兴, 张崇巍 永磁同步电机矢量控制双滑模模型参考自适应系统转速辨识[J]. 中国电机工程学报, 2014, 34 (6): 897- 902
WANG Qing-long, ZHANG Xing, ZHANG Chong-wei Double sliding-mode model reference adaptive system speed identification for vector control of permanent magnet synchronous motors[J]. Proceeding of the CSEE, 2014, 34 (6): 897- 902
doi: 10.13334/j.0258-8013.pcsee.2014.06.010
|
|
|
| [14] |
ANDERSON R B, MARSHALL J A, L'AFFLITTO A Novel model reference adaptive control laws for improved transient dynamics and guaranteed saturation constraints[J]. Journal of the Franklin Institute, 2021, 358 (12): 6281- 6308
doi: 10.1016/j.jfranklin.2021.06.020
|
|
|
| [15] |
KAMALIFAR A, MENHAJ M B, MONFARED M N, et al Design of robust model reference adaptive controller for a wider class of nonlinear systems[J]. Iranian Journal of Science and Technology, Transactions of Electrical Engineering, 2022, 46: 127- 139
doi: 10.1007/s40998-021-00451-8
|
|
|
| [16] |
MISHRA P K, AGRAWAL P, DHAR N K, et al. On adaptive control for AGV with vision sensor as an unknown nonlinear system [M]// VERMA N, GHOSH A. Computational intelligence: theories, applications and future directions-volume Ⅱ. Advances in intelligent systems and computing. [S.l.]: Springer, 2018: 265-277.
|
|
|
| [17] |
NGUYEN N T. Model-reference adaptive control: a primer [M]. [S. l.]: Springer, 2018: 65-70.
|
|
|
| [18] |
方强, 陈利鹏, 费少华, 等 定位器模型参考自适应控制系统设计[J]. 浙江大学学报:工学版, 2013, 47 (12): 2234- 2242
FANG Qiang, CHEN Li-peng, FEI Shao-hua, et al Model reference adaptive control system design of localizer[J]. Journal of Zhejiang University: Engineering Science, 2013, 47 (12): 2234- 2242
|
|
|
| [19] |
SAHHARY B, SIEMENS, MA Z X, et al Sensorless speed control of PMSM based on MRAC using active power[J]. European Power Electronics and Drives, 2015, 25 (2): 19- 25
|
|
|
| [20] |
施丽婷, 黄筱调, 杨勇 数控交流伺服系统三环整定及应用[J]. 南京工业大学学报: 自然科学版, 2006, 28 (4): 36- 40
SHI Li-ting, HUANG Xiao-tiao, YANG Yong Parameter tuning and application of the three loops in a NC servo system[J]. Journal of Nanjing University of Technology: Natural Science Edition, 2006, 28 (4): 36- 40
|
|
|
| [21] |
HU H Q, SHI W F Modeling and simulation of all-electric propulsion system with three-closed loop control[J]. Journal of Computational Methods in Sciences and Engineering, 2021, 21 (1): 109- 123
doi: 10.3233/JCM-204432
|
|
|
| [22] |
解小刚, 陈进 采用id=0的永磁同步电机矢量控制系统MATLAB/Simulink仿真 [J]. 新型工业化, 2016, 6 (5): 47- 54
XIE Xiao-gang, CHEN Jin Vector control with id=0 simulation of PMSM based on MATLAB/Simulink [J]. The Journal of New Industrialization, 2016, 6 (5): 47- 54
|
|
|
| [23] |
张宇, 李岱若 某型运动平台三环控制系统设计与仿真[J]. 现代雷达, 2020, 42 (3): 57- 62
ZHANG Yu, LI Dai-ruo Design and simulation of a three-loop control system for a certain motion control[J]. Modern Rader, 2020, 42 (3): 57- 62
|
|
|
| [24] |
WILLIAM A, TAYLOR F. Electronic filter design handbook [M]. 4th ed. New York City: McGraw-Hill, 2006: 30-33.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|