|
|
|
| Decentralized swarm control based on graph convolutional imitation learning |
Ce GUO( ),Zhi-wen ZENG*(),Peng-ming ZHU,Zhi-qian ZHOU,Hui-min LU ),Zhi-wen ZENG*(),Peng-ming ZHU,Zhi-qian ZHOU,Hui-min LU |
| College of Intelligence Science and Technology, National University of Defense Technology, Changsha 410073, China |
|
|
|
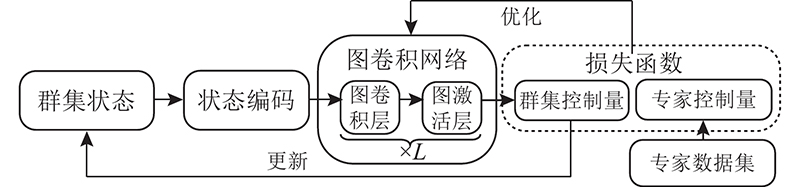
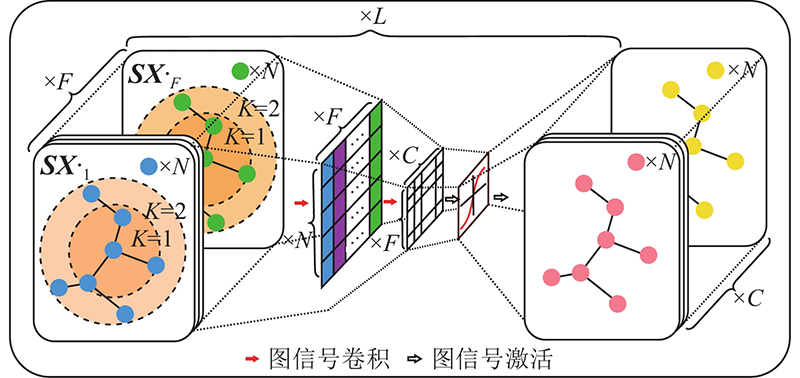
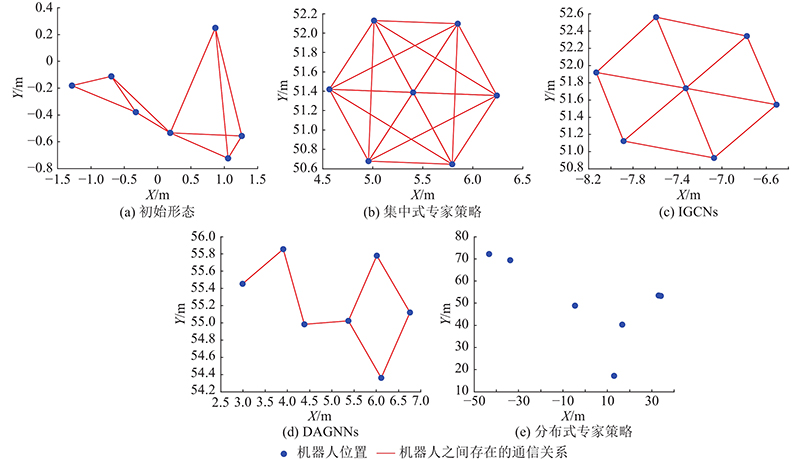
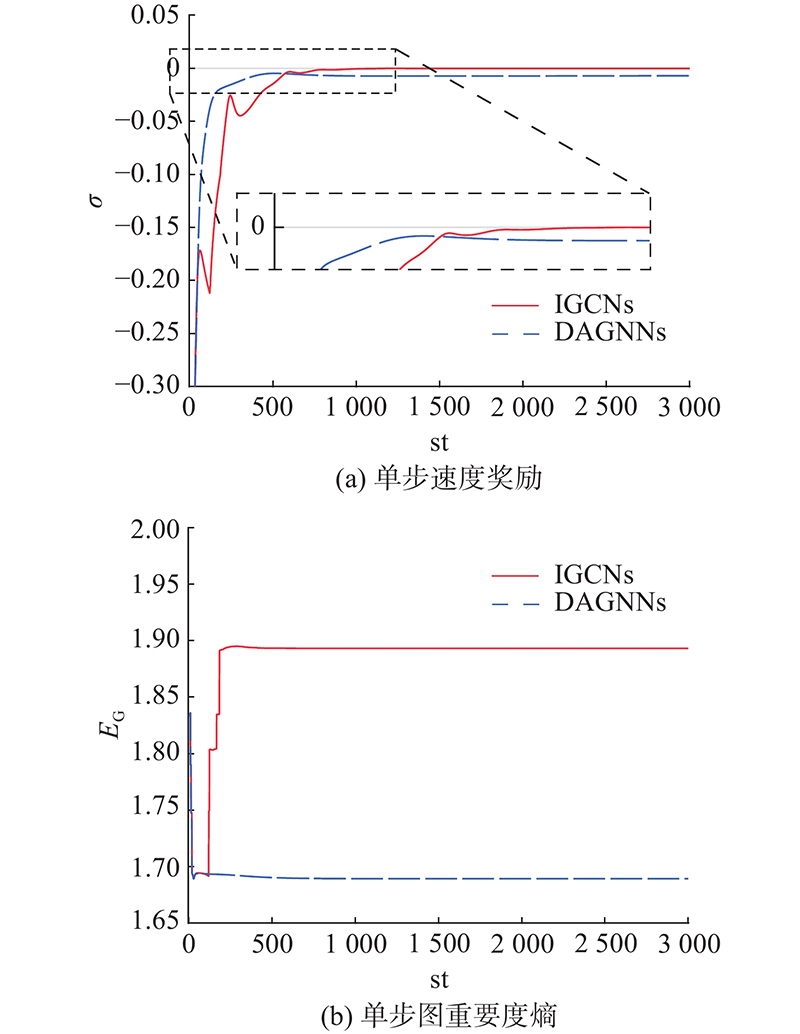
Abstract A distributed swarm control strategy based on graph convolutional imitation learning was proposed to deal with the cooperative control of robot swarms under restricted communication conditions. The strategy aimed to improve swarm robustness and enhance the success rate of avoiding swarm splitting based on achieving intra-swarm obstacle avoidance and velocity consistency. A quantitative evaluation index of swarm robustness based on entropy evaluation was proposed to establish the connection between the balanced distribution of node and link importance and cluster robustness. The importance-correlated graph convolutional networks were proposed to realize feature extraction and weighted aggregation of non-Euclidean data under restricted communication conditions. A centralized expert strategy was designed to improve swarm robustness, and the graph convolutional imitation learning method was adopted. Furthermore, a distributed swarm cooperative control strategy was obtained by imitating the centralized expert strategy. Simulation experiments demonstrate that the resulting distributed strategy achieves control effects close to those of the centralized expert strategy based on restricted communication conditions.
|
|
Received: 27 February 2022
Published: 30 June 2022
|
|
|
| Fund: 国家自然科学基金资助项目(U1913202, U1813205) |
|
Corresponding Authors:
Zhi-wen ZENG
E-mail: guoce1997@foxmail.com;z7z7w7@126.com
|
基于图卷积模仿学习的分布式群集控制
针对受限通信条件下机器人群集协同控制问题,提出基于图卷积模仿学习的分布式群集控制策略. 该策略旨在实现群集内避障、速度一致性的基础上,提高群集鲁棒性,提升避免群集分裂的成功率. 提出基于熵评价的群集鲁棒性量化评价指标,建立节点和链路重要性的均衡分布与群集鲁棒性的联系. 提出重要度相关图卷积网络,用于实现受限通信条件下非欧氏数据的特征提取和加权聚合. 采用图卷积模仿学习方法,根据提升群集鲁棒性的要求设计集中式专家策略,通过对集中式专家策略的模仿,得到分布式群集协同控制策略. 设计仿真实验,证明所得的分布式策略基于受限通信条件实现了接近集中式的专家策略的控制效果.
关键词:
机器人群集,
图卷积网络,
模仿学习,
鲁棒性,
图重要度熵
|
|
| [1] |
GARATTONI L, BIRATTARI M Autonomous task sequencing in a robot swarm[J]. Science Robotics, 2018, 3 (20): eaat0430
doi: 10.1126/scirobotics.aat0430
|
|
|
| [2] |
VÁSÁRHELYI G, VIRÁGH C, SOMORIAI G, et al Optimized flocking of autonomous drones in confined environments[J]. Science Robotics, 2018, 3 (20): eaat3536
doi: 10.1126/scirobotics.aat3536
|
|
|
| [3] |
KHALDI B, HARROU F, CHERIF F, et al Self organization in aggregating robot swarms: a DW-KNN topological approach[J]. Biosystems, 2018, 165: 106- 121
doi: 10.1016/j.biosystems.2018.01.005
|
|
|
| [4] |
YAN L, STOURAITIS T, VIJAYKUMAR S Decentralized ability-aware adaptive control for multi-robot collaborative manipulation[J]. IEEE Robotics and Automation Letters, 2021, 6 (2): 2311- 2318
doi: 10.1109/LRA.2021.3060379
|
|
|
| [5] |
ZHOU L, TOKEKAR P Multi-robot coordination and planning in uncertain and adversarial environments[J]. Current Robotics Reports, 2021, 2 (2): 147- 157
doi: 10.1007/s43154-021-00046-5
|
|
|
| [6] |
ZHOU Z, YAO W, MA J, et al. Simatch: a simulation system for highly dynamic confrontations between multi-robot systems [C]// 2018 Chinese Automation Congress. Xi’an: IEEE, 2018: 3934-3939.
|
|
|
| [7] |
REYNOLDS C W. Flocks, herds and schools: a distributed behavioral model [C]// Proceedings of the 14th annual conference on Computer graphics and interactive techniques. New York: Association for Computing Machinery, 1987: 25-34.
|
|
|
| [8] |
PROROK A, KUMAR V. Privacy-preserving vehicle assignment for mobility-on-demand systems [C]// 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems. Vancouver: IEEE, 2017: 1869-1876.
|
|
|
| [9] |
ZHENG H, PANERATI J, BELTRAME G, et al An adversarial approach to private flocking in mobile robot teams[J]. IEEE Robotics and Automation Letters, 2020, 5 (2): 1009- 1016
doi: 10.1109/LRA.2020.2967331
|
|
|
| [10] |
LI L, BAYUELO A, BOBADILLA L, et al. Coordinated multi-robot planning while preserving individual privacy [C]// 2019 International Conference on Robotics and Automation. Montreal: IEEE, 2019: 2188-2194.
|
|
|
| [11] |
LI Q, GAMA F, RIBEIRO A, et al. Graph neural networks for decentralized multi-robot path planning [C]// 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems. Las Vegas: IEEE, 2020: 11785-11792.
|
|
|
| [12] |
TOLSTAYA E, GAMA F, PAULOS J, et al. Learning decentralized controllers for robot swarms with graph neural networks [C]// Conference on robot learning. Osaka: PMLR. 2020: 671-682.
|
|
|
| [13] |
ZHU P, DAI W, YAO W, et al Multi-robot flocking control based on deep reinforcement learning[J]. IEEE Access, 2020, 8: 150397- 150406
doi: 10.1109/ACCESS.2020.3016951
|
|
|
| [14] |
WANG Z, GOMBOLAY M Learning scheduling policies for multi-robot coordination with graph attention networks[J]. IEEE Robotics and Automation Letters, 2020, 5 (3): 4509- 4516
doi: 10.1109/LRA.2020.3002198
|
|
|
| [15] |
HU T K, GAMA F, CHEN T, et al. VGAI: end-to-end learning of vision-based decentralized controllers for robot swarms [C]// ICASSP 2021-2021 IEEE International Conference on Acoustics, Speech and Signal Processing. Toronto: IEEE, 2021: 4900-4904.
|
|
|
| [16] |
GAMA F, TOLSTAYA E, RIBEIRO A. Graph neural networks for decentralized controllers [C]// ICASSP 2021-2021 IEEE International Conference on Acoustics, Speech and Signal Processing. Toronto: IEEE, 2021: 5260-5264.
|
|
|
| [17] |
WANG Z, LIU C, GOMBOLAY M Heterogeneous graph attention networks for scalable multi-robot scheduling with temporospatial constraints[J]. Autonomous Robots, 2022, 46 (1): 249- 268
doi: 10.1007/s10514-021-09997-2
|
|
|
| [18] |
JIANG Y, HU A, HE M. Evaluation method for the network reliability based on the entropy measures [C]// 2009 International Conference on Networks Security, Wireless Communications and Trusted Computing. Wuhan: IEEE, 2009, 2: 423-426.
|
|
|
| [19] |
TANNER H G, JADBABAIE A, PAPPAS G J. Stable flocking of mobile agents, part I: fixed topology [C]// 42nd IEEE International Conference on Decision and Control. Maui: IEEE, 2003, 2: 2010-2015.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|