|
|
|
| Robust cooperative target tracking under heavy-tailed non-Gaussian localization noise |
Xiao-bo CHEN( ),Ling CHEN,Shu-rong LIANG,Yu HU ),Ling CHEN,Shu-rong LIANG,Yu HU |
| Automotive Engineering Research Institute, Jiangsu University, Zhenjiang 212013, China |
|
|
|
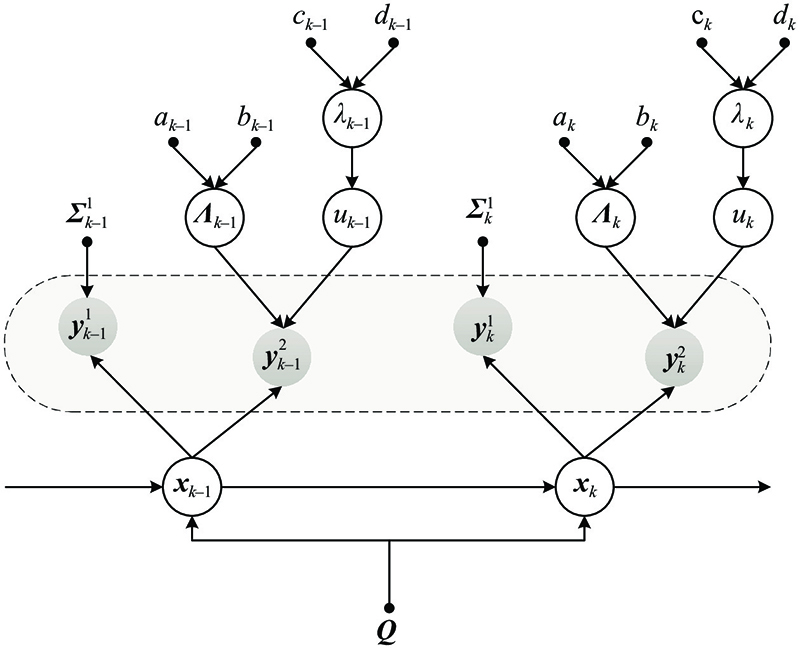
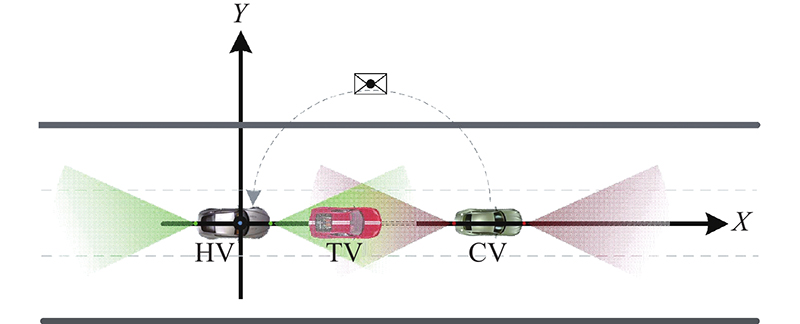
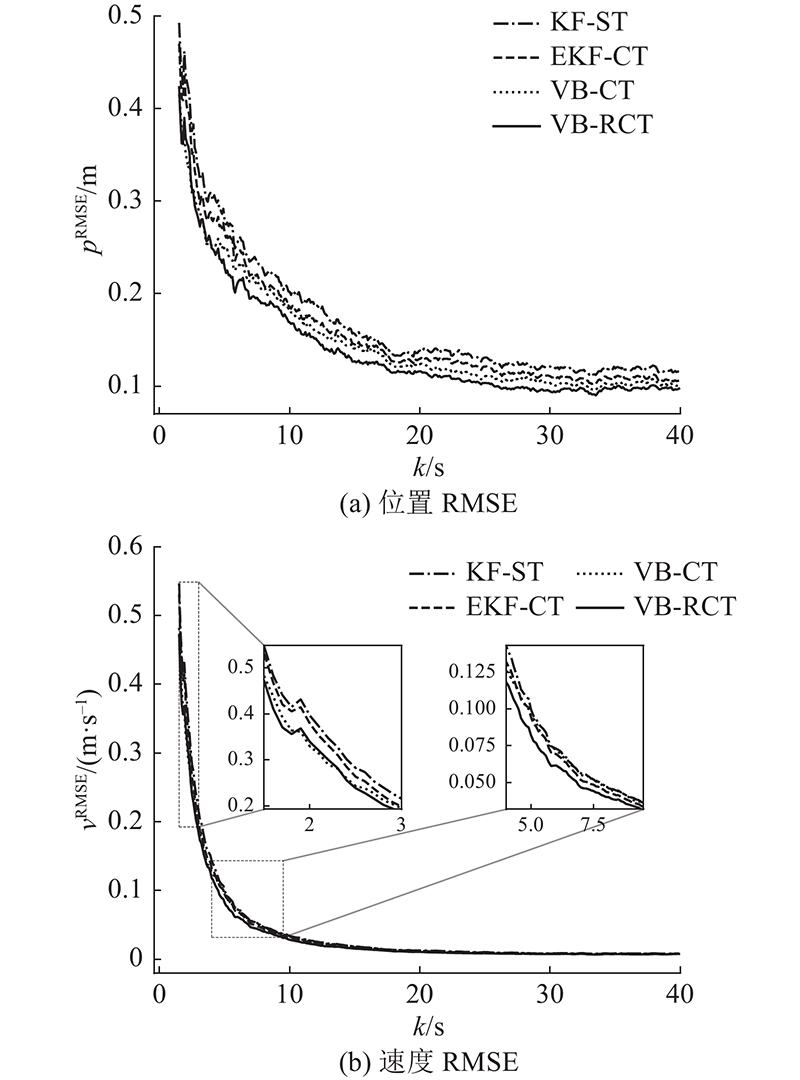
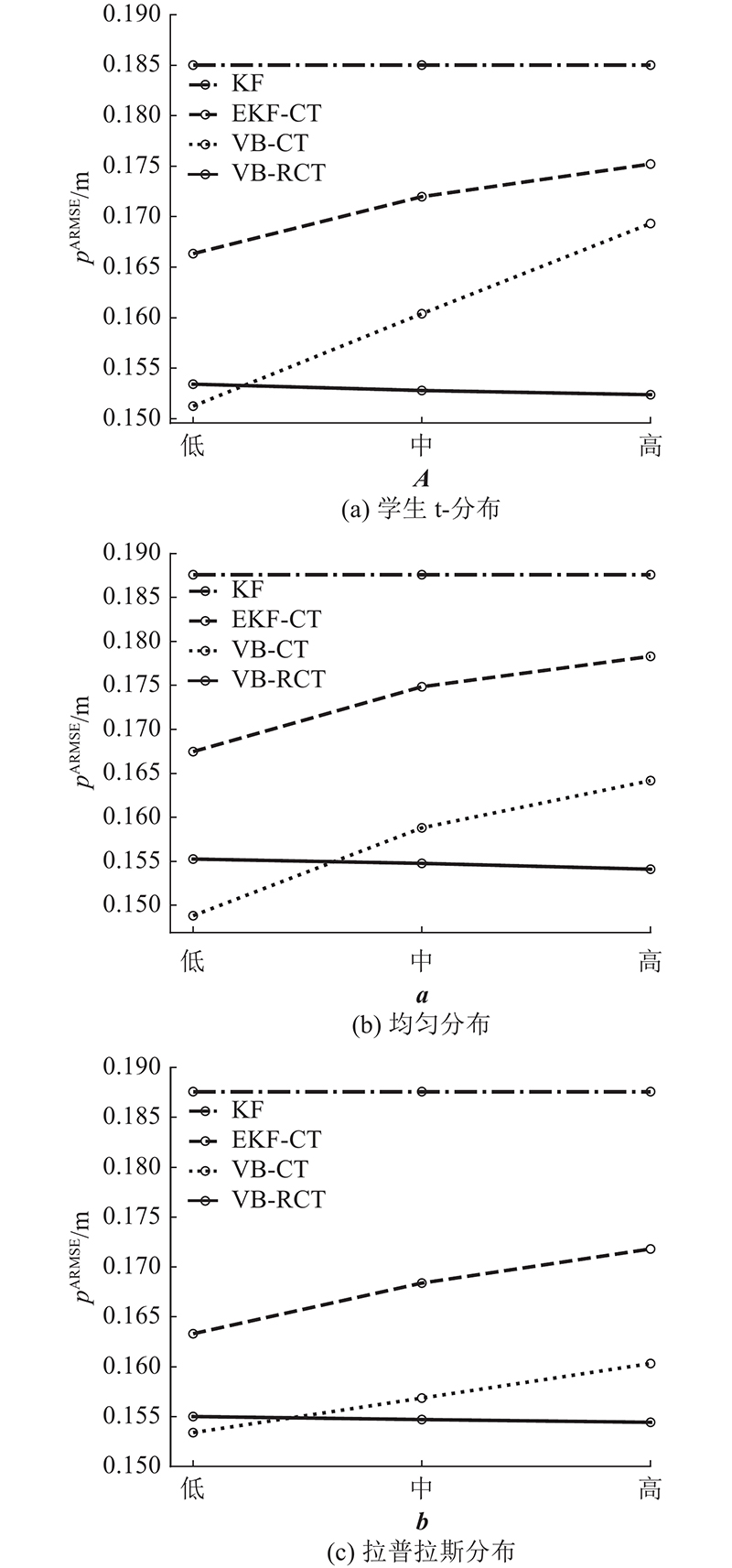
Abstract The statistical properties of the localization data are unknown and the localization data are susceptible to outlier interference, which affects the cooperative target tracking performance. Aiming at the problem, a robust cooperative target tracking method for heavy-tailed non-Gaussian localization noise was proposed. It was assumed that the localization noise followed multivariate Student’s t-distribution and a joint Bayesian estimation model of target state and localization noise parameters was constructed. To overcome the difficulty of computing joint posterior distribution owing to the coupling of target state and noise distribution parameters, the variational Bayesian inference and the mean-field theory were applied to decouple the joint posterior distribution and convert the problem of joint estimation of target state and localization noise parameters into a optimization problem. Alternative optimization was implemented to achieve recursive estimation of system parameters. The proposed cooperative target tracking method was evaluated experimentally. Simulation results showed that when unknown outliers exist in localization data, the proposed algorithm has better tracking robustness.
|
|
Received: 05 June 2021
Published: 31 May 2022
|
|
|
| Fund: 国家自然科学基金资助项目(61773184);国家重点研发计划资助项目(2018YFB0105000);江苏省六大人才高峰高层次人才资助项目(JXQC-007) |
重尾非高斯定位噪声下鲁棒协同目标跟踪
针对定位数据的统计特性未知且易受异常值干扰而影响协同目标跟踪性能的问题,提出一种重尾非高斯定位噪声下的鲁棒协同目标跟踪方法. 该方法假设定位噪声服从多元学生t-分布,建立联合估计目标状态与定位噪声参数的贝叶斯模型. 针对目标状态与噪声分布参数相互耦合而难以计算联合后验分布的问题,应用变分贝叶斯推断原理和平均场理论对后验分布进行解耦,将目标状态与定位噪声参数的联合后验分布估计问题转化为最优化问题,以交替优化的方式实现系统参数的在线递推估计. 对提出的协同目标跟踪方法进行测试. 仿真结果表明,当定位数据中存在未知的野值噪声时,提出的协同跟踪算法具有较好的鲁棒性.
关键词:
协同目标跟踪,
学生t-分布,
变分贝叶斯推断,
野值噪声,
鲁棒性
|
|
| [1] |
裴汉林 基于深度学习的自动驾驶环境感知技术研究[J]. 内燃机与配件, 2021, (4): 193- 194
PEI Han-lin Research on autonomous driving environment perception technology based on Deep Learning[J]. Internal Combustion Engine and Parts, 2021, (4): 193- 194
doi: 10.3969/j.issn.1674-957X.2021.04.089
|
|
|
| [2] |
RANDESH A, TRIVEDI M M No Blind Spots: full-surround multi-object tracking for autonomous vehicles using cameras and LiDARs[J]. IEEE Transactions on Intelligent Vehicles, 2019, 4 (4): 588- 599
doi: 10.1109/TIV.2019.2938110
|
|
|
| [3] |
DHAMANAM N, KATHIRVELU M, RAO T G Review of environment perception for intelligent vehicles[J]. International Journal of Engineering and Management Research, 2019, 9 (2): 13- 17
|
|
|
| [4] |
石章松, 刘志坤, 吴中红. 目标定位跟踪方法与实践[M]. 北京: 电子工业出版社, 2019.
|
|
|
| [5] |
SAWARAGI Y, KATAYAMA T Performance loss and design method of Kalman filters for discrete-time linear systems with uncertainties[J]. International Journal of Control, 1970, 12 (1): 163- 172
doi: 10.1080/00207177008931830
|
|
|
| [6] |
NATTAPOL A, KUNRUTAI P, BENIAWAN T, et al A novel adaptive resampling for sequential Bayesian filtering to improve frequency estimation of time-varying signals[J]. Heliyon, 2021, 7 (4): e06768
doi: 10.1016/j.heliyon.2021.e06768
|
|
|
| [7] |
BEAL M J. Variational algorithms for approximate Bayesian inference [D]. London: University College London, 2003.
|
|
|
| [8] |
SARKKA S, NUMMENMAA A. Recursive noise adaptive Kalman filtering by variational approximations [J]. IEEE Transactions on Automatic Control. 2009, 54(3): 596-600.
|
|
|
| [9] |
沈忱, 徐定杰, 沈锋, 等 基于变分推断的一般噪声自适应卡尔曼滤波[J]. 系统工程与电子技术, 2014, 36 (8): 1466- 1472
SHEN Chen, XU Ding-jie, SHEN Feng, et al Generalized noises adaptive Kalman filtering based on variational inference[J]. Systems Engineering and Electronics, 2014, 36 (8): 1466- 1472
doi: 10.3969/j.issn.1001-506X.2014.08.03
|
|
|
| [10] |
余东平, 何谢, 齐扬阳, 等 基于变分贝叶斯推理的多目标无源定位算法[J]. 南京邮电大学学报:自然科学版, 2018, 38 (2): 48- 53,59
YU Dong-ping, HE Xie, QI Yang-yang, et al Variational Bayesian inference based multi-target device-free localization algorithm[J]. Journal of Nanjing University of Posts and Telecommunications: Science and Technology, 2018, 38 (2): 48- 53,59
|
|
|
| [11] |
ZHU H, LEUNG H, HE Z A variational Bayesian approach to robust sensor fusion based on Student-t distribution[J]. Information Sciences, 2013, 221: 201- 214
doi: 10.1016/j.ins.2012.09.017
|
|
|
| [12] |
HUANG Y L, ZHANG Y G, LI N, et al A novel robust student's t-based Kalman filter[J]. IEEE Transactions on Aerospace and Electronic Systems, 2017, 53 (3): 1545- 1554
doi: 10.1109/TAES.2017.2651684
|
|
|
| [13] |
喻尚, 杨艳, 张正轩, 等 车载无线通信技术浅析[J]. 汽车电器, 2021, (3): 46- 47,50
YU Shang, YANG Yan, ZHANG Zheng-xuan, et al Discussion on vehicle wireless communication technology[J]. Autoelectric Parts, 2021, (3): 46- 47,50
doi: 10.3969/j.issn.1003-8639.2021.03.017
|
|
|
| [14] |
KEVVAN A Joint use of DSRC and C-V2X for V2X communications in the 5.9 GHz ITS band[J]. IET Intelligent Transport Systems, 2020, 15 (2): 213- 224
|
|
|
| [15] |
HUANG C, HU P, LIAN J Online optimum velocity calculation under V2X for smart new energy vehicles[J]. Transactions of the Institute of Measurement and Control, 2021, 43 (10): 2368- 2377
doi: 10.1177/0142331221997280
|
|
|
| [16] |
KIRILL K, ALEXANDER M, BORIS M Robust data fusion of UAV navigation measurements with application to the landing system[J]. Remote Sensing, 2020, 12 (23): 3849
doi: 10.3390/rs12233849
|
|
|
| [17] |
陈宇波, 宋迎春 非高斯噪声下的车载GPS信号定位算法[J]. 中南大学学报:自然科学版, 2010, 41 (4): 1462- 1466
CHEN Yu-bo, SONG Ying-chun A Bayes filter algorithm with non-Gaussian noises based on location of vehicular GPS[J]. Journal of Central South University: Science and Technology, 2010, 41 (4): 1462- 1466
|
|
|
| [18] |
胡淼淼, 敬忠良, 董鹏, 等 基于T分布变分贝叶斯滤波的SINS/GPS组合导航[J]. 浙江大学学报:工学版, 2018, 52 (8): 1482- 1488
HU Miao-miao, JING Zhong-liang, DONG Peng, et al Variational Bayesian filtering based on Student-t distribution for SINS/GPS integrated navigation[J]. Journal of Zhejiang University: Engineering Science, 2018, 52 (8): 1482- 1488
|
|
|
| [19] |
BISHOP C M. Pattern recognition and machine learning[M]. Cambridge: Springer, 2006.
|
|
|
| [20] |
XIAO G C, SONG X L, CAO H T, et al Augmented extended Kalman filter with cooperative Bayesian filtering and multi-models fusion for precise vehicle localisations[J]. IET Radar, Sonar and Navigation, 2020, 14 (11): 1815- 1826
doi: 10.1049/iet-rsn.2020.0155
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|