|
|
|
| Optimal design and experimental study of thrust adsorption wall-climbing robot |
Chao-jun XUE1( ),Hai-bo WANG1,2,*(),Yu-peng CHEN1 ),Hai-bo WANG1,2,*(),Yu-peng CHEN1 |
1. School of Mechanical Engineering, Southwest Jiaotong University, Chengdu 610031, China
2. Technology and Equipment of Rail Transit Operation and Maintenance Key Laboratory of Sichuan Province, Chengdu 610031, China |
|
|
|
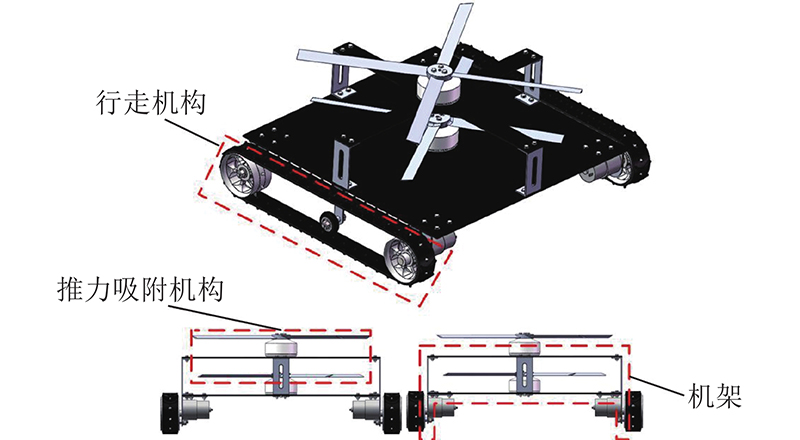
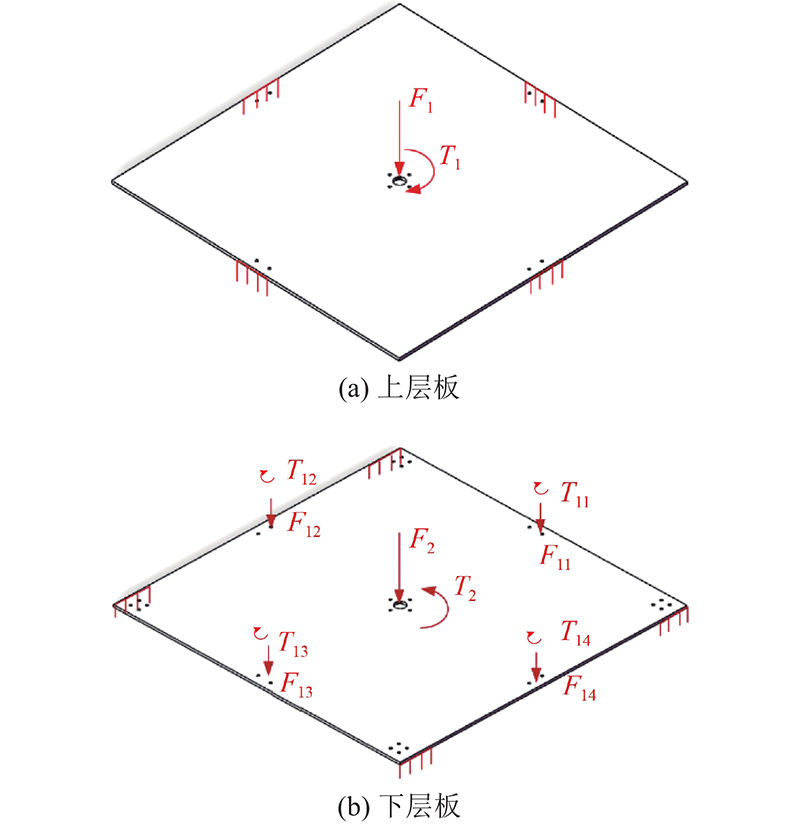
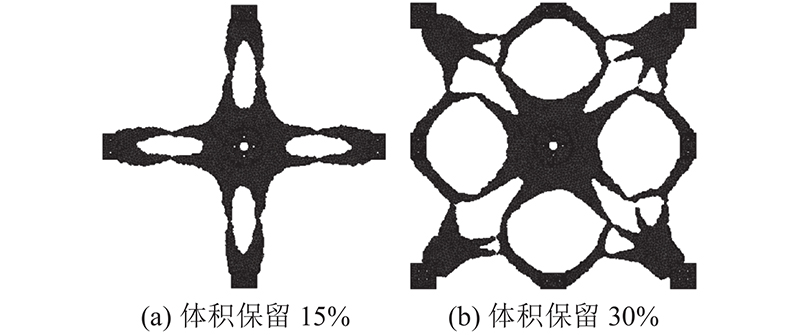
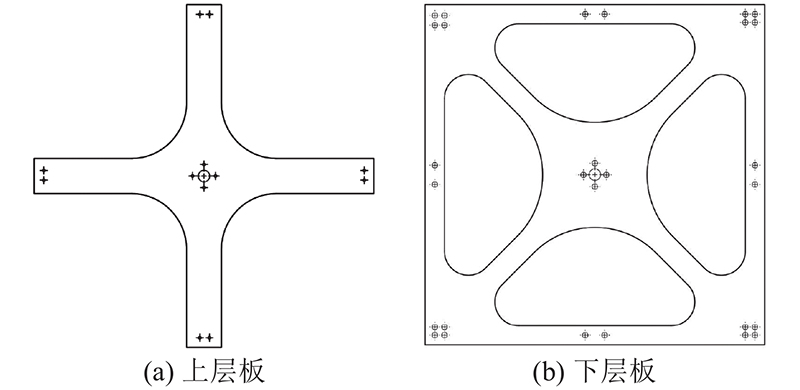
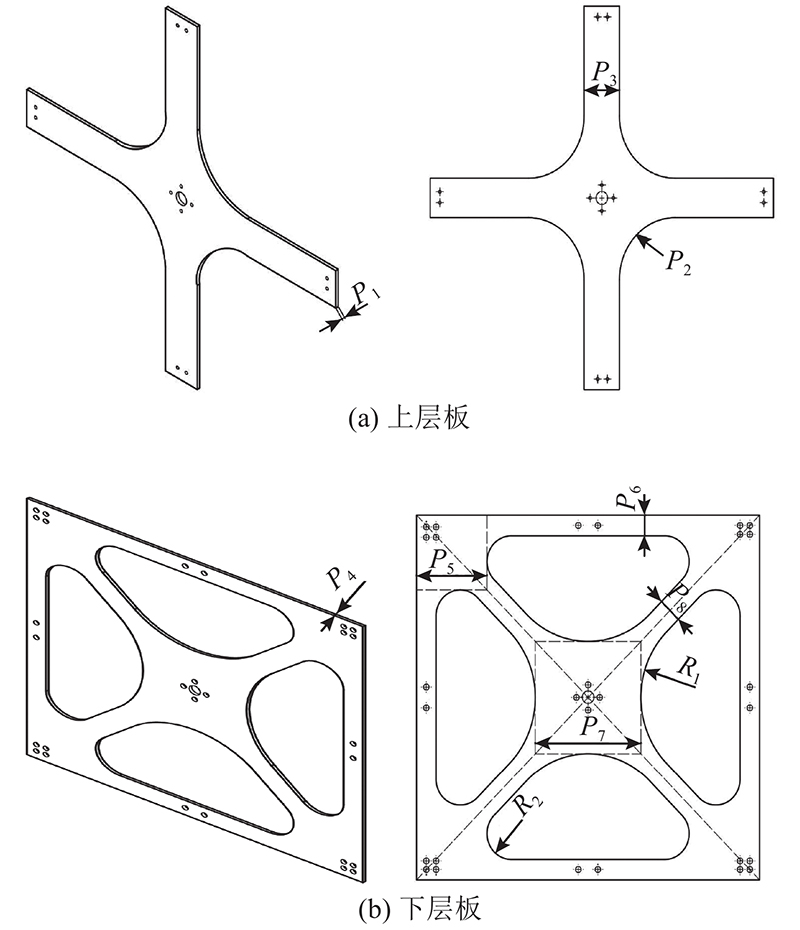
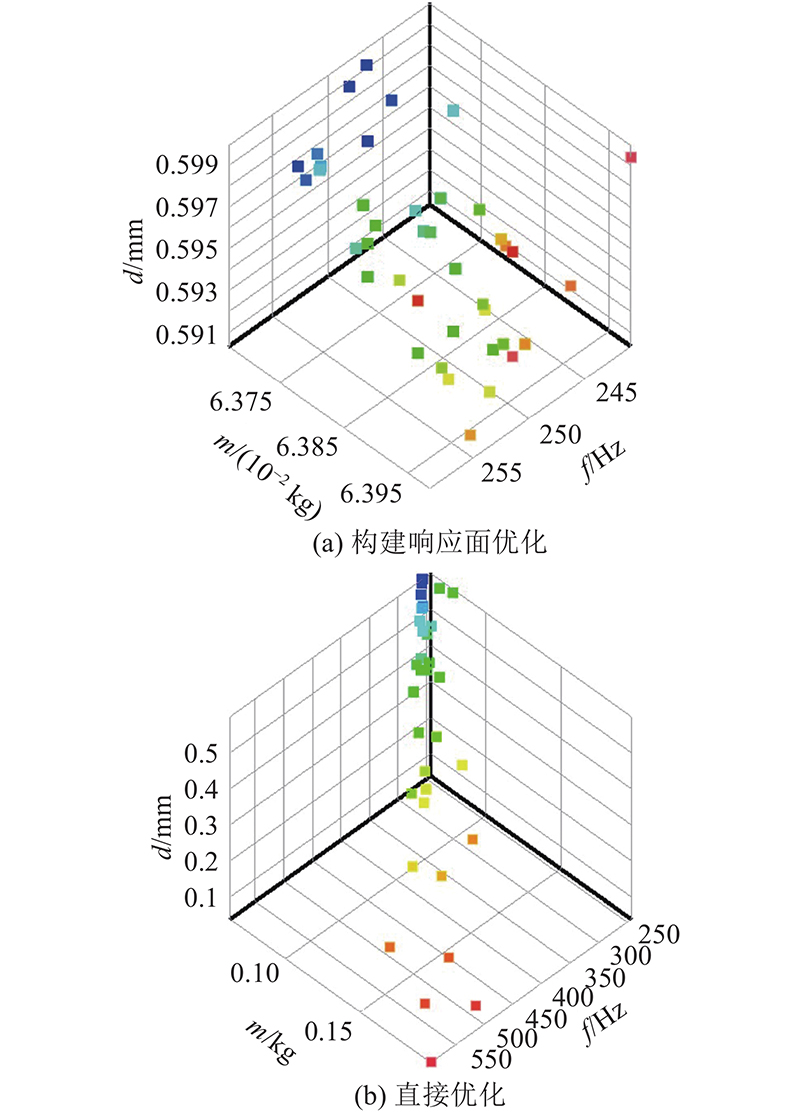
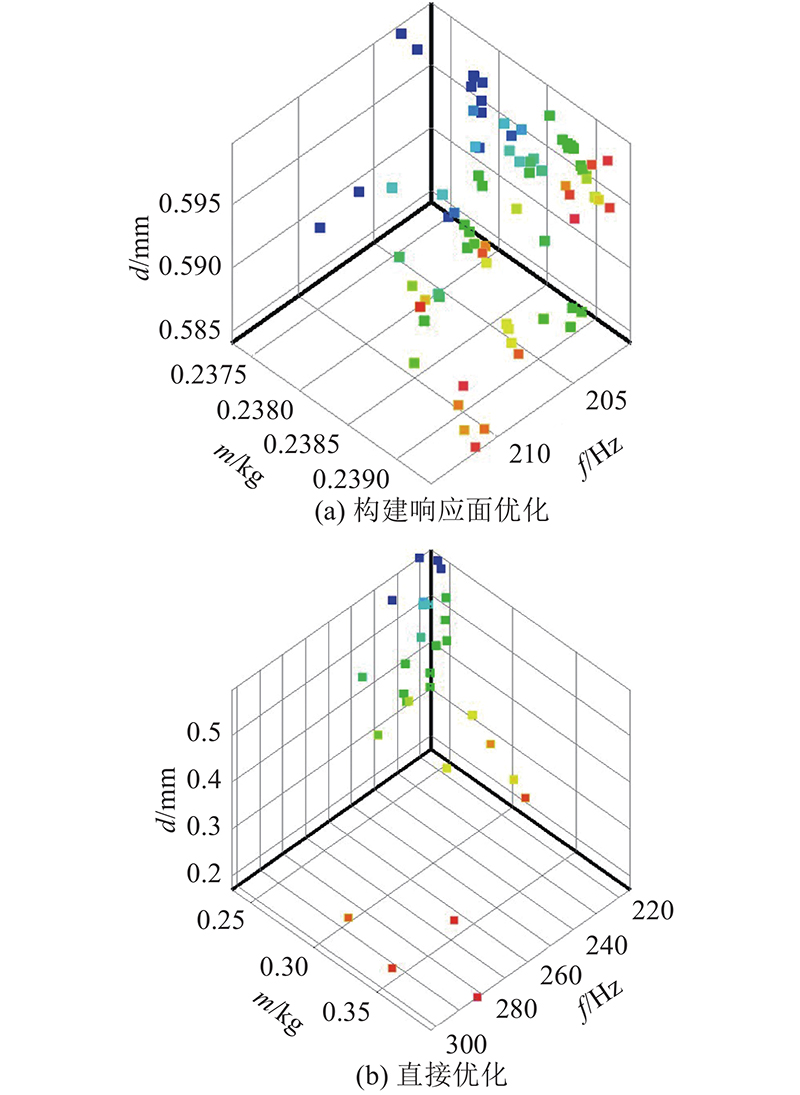
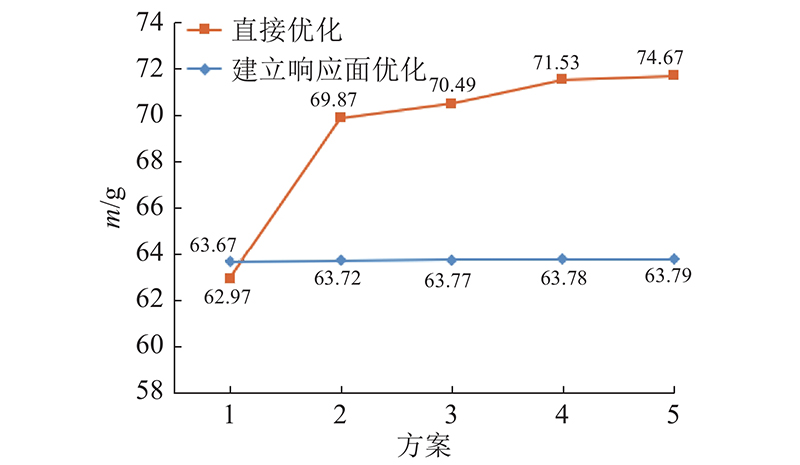
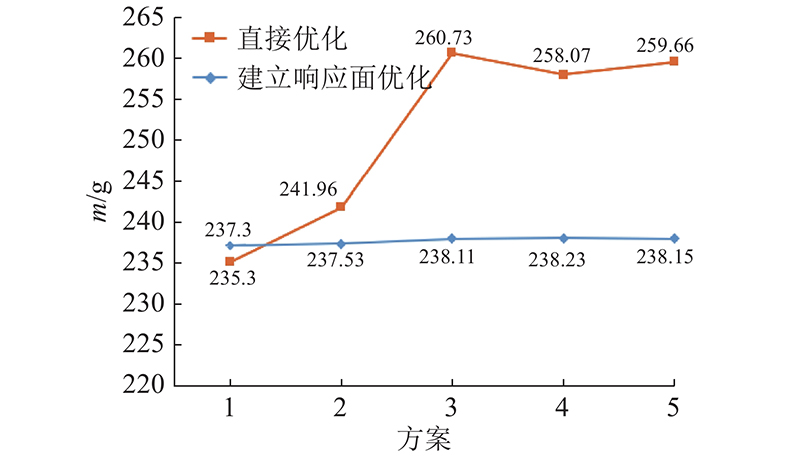
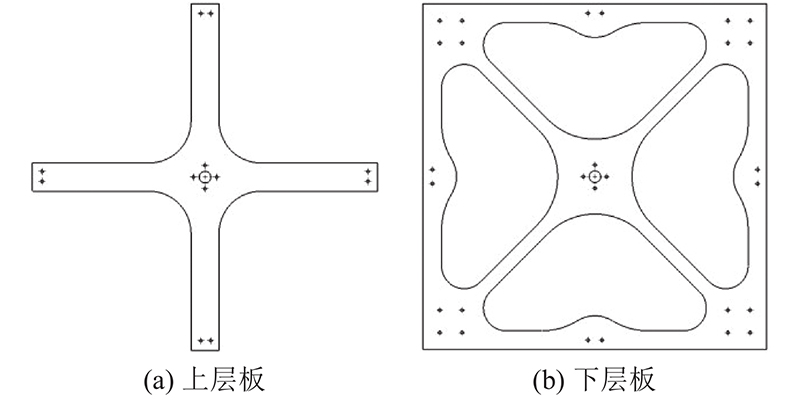
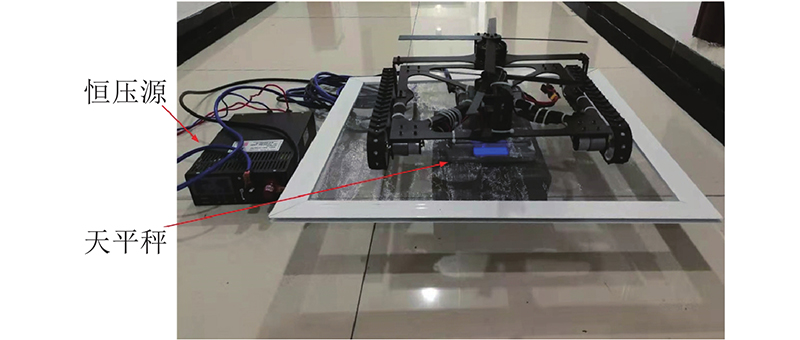
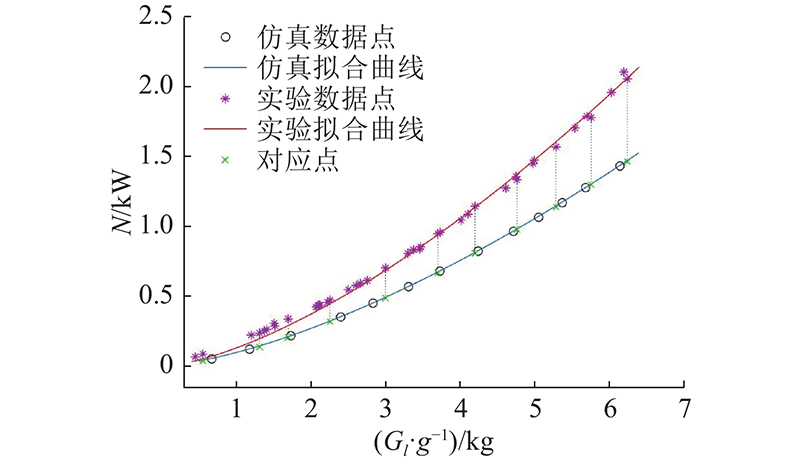
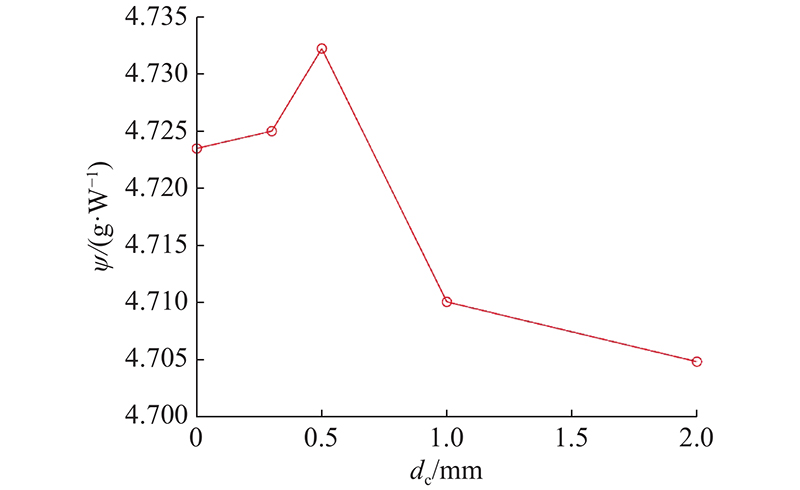
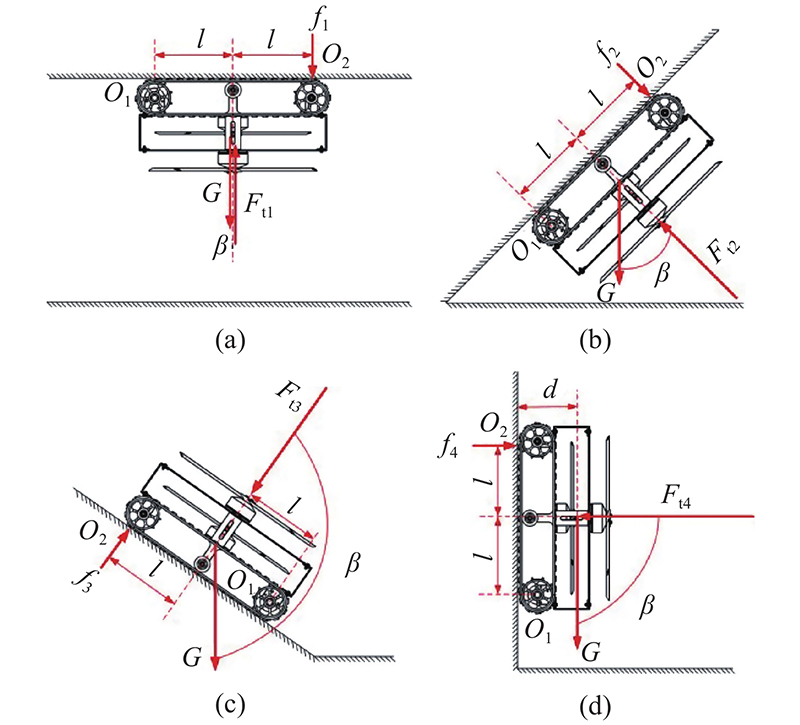
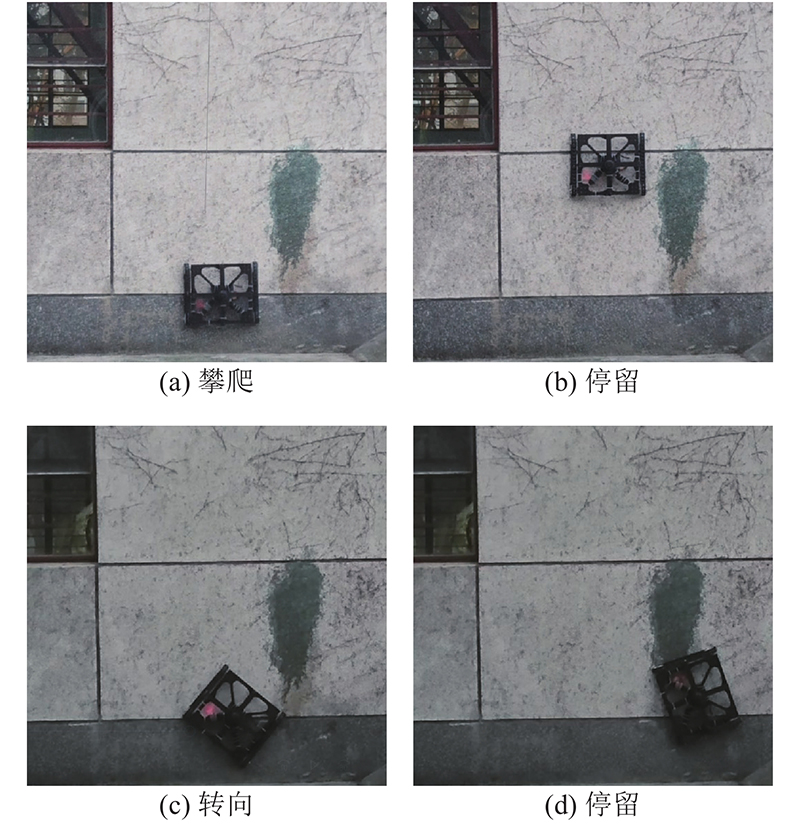
Abstract A kind of thrust adsorption wall-climbing robot with coaxial dual-rotor was introduced. The thrust adsorption mechanism and frame were optimized respectively to enhance the load capacity, reduce energy consumption and increase the endurance time. The aerodynamic parameters of the thrust adsorption mechanism, such as blade number, blade installation angle and spacing ratio, were controlled by the control variable method. The aerodynamic model of the robot under different aerodynamic parameters was established and the flow field was simulated and solved. Based on the simulation results, the optimal design of the thrust adsorption mechanism was completed. Based on topology optimization, the structural parameter optimization design of the robot frame was completed by building response surface combined with multi objective genetic algorithm (MOGA) optimization and direct adaptive single-objective (AS-O) optimization. Compared with the initial structure, the mass of upper and lower plates were decreased 55.62% and 25.39% respectively. The thrust adsorption mechanism and climbing ability of robot were tested respectively, and the experimental results show that the aerodynamic simulation results of the thrust adsorption mechanism are reliable. The deviation of the rotation center axis of the upper and lower rotors is closely related to the performance of the thrust adsorption mechanism, and the robot has a good wall climbing ability.
|
|
Received: 19 April 2021
Published: 30 June 2022
|
|
|
| Fund: 国家自然科学基金资助项目(51905451);轨道交通运维技术与装备四川省重点实验室开放基金资助项目(2019YW002) |
|
Corresponding Authors:
Hai-bo WANG
E-mail: 861356816@qq.com;haibowang@home.swjtu.edu.cn
|
推力吸附爬壁机器人的优化设计与试验
介绍共轴式双旋翼推力吸附爬壁机器人,通过优化推力吸附机构和机架,增强负载能力、降低能耗、增加续航时间. 采用控制变量法控制推力吸附机构的气动参数如叶片数、桨叶安装角、间距比等,建立不同气动参数下机器人气动模型并进行流场仿真。基于仿真结果,完成推力吸附机构的优化设计;基于拓扑优化用构建响应面叠加多目标遗传优化算法(MOGA)、直接单目标自适应优化算法(AS-O)优化,完成机器人机架结构参数优化设计。与初始结构相比,机架上、下层板质量分别降低了55.62%、25.39%. 试验推力吸附机构和机器人攀爬能力,结果表明,推力吸附机构气动仿真结果可靠,上、下层旋翼旋转中心轴偏差与推力吸附机构性能关系密切,机器人具备良好壁面攀爬能力.
关键词:
爬壁机器人,
气动模型,
流场仿真,
结构参数优化
|
|
| [1] |
董雅芸 我国桥梁安全与健康检测监测新技术的发展与应用: 访在役长大桥梁安全与健康国家重点实验室主任张宇峰[J]. 现代交通技术, 2020, 17 (6): 1- 6
DONG Ya-yun Development and application of new inspection and monitoring technology for bridge safety and health in China: interview with Zhang Yufeng, director of the state key laboratory of safety and health for in-service long span bridge[J]. Modern Transportation Technology, 2020, 17 (6): 1- 6
doi: 10.3969/j.issn.1672-9889.2020.06.001
|
|
|
| [2] |
刘洋. 基于结构计算与海量样本数据统计的桥梁预警指标方法研究[D]. 合肥: 安徽建筑大学, 2020: 1.
LIU Yang. Research on bridge early warning index method based on structural calculation and massive sample data statistics [D]. Hefei: Anhui Jianzhu University, 2020: 1.
|
|
|
| [3] |
SUKVICHAI K, MAOLANON P, SONGKRASIN K. Design of a double-propellers wall-climbing robot [C]// 2017 IEEE International Conference on Robotics and Biomimetics (ROBIO), Macau: IEEE, 2017: 239-245.
|
|
|
| [4] |
Disney makes carbon fiber wall-climbing robot [J]. Reinforced Plastics, 2016, 60(2) : 75.
|
|
|
| [5] |
ADARSH R S, DHARMANA M M Multi-terrain multi-utility robot[J]. Procedia Computer Science, 2018, 133: 651- 659
doi: 10.1016/j.procs.2018.07.100
|
|
|
| [6] |
LIANG P, GAO X S, ZHANG Q F, et al Design and stability analysis of a wall-climbing robot using propulsive force of propeller[J]. Symmetry, 2020, 13 (1): 37
doi: 10.3390/sym13010037
|
|
|
| [7] |
ALKALLA M G, FANNI M A, MOHAMED A F, et al Tele-operated propeller-type climbing robot for inspection of petrochemical vessels[J]. Industrial Robot: An International Journal, 2017, 44 (2): 166- 177
doi: 10.1108/IR-07-2016-0182
|
|
|
| [8] |
ALKALLA M G, FANNI M A, MOHAMED A F, et al EJBot-II: an optimized skid-steering propeller-type climbing robot with transition mechanism[J]. Advanced Robotics, 2019, 33 (20): 1042- 1059
doi: 10.1080/01691864.2019.1657948
|
|
|
| [9] |
曾伟, 林永峰, 黄水林, 等 共轴刚性旋翼非定常气动特性初步试验研究[J]. 直升机技术, 2017, (1): 13- 17
ZENG Wei, LIN Yong-feng, HUANG Shui-lin, et al Preliminary experimental research on unsteady aerodynamic characteristics of coaxial rigid rotor[J]. Helicopter Hechnique, 2017, (1): 13- 17
doi: 10.3969/j.issn.1673-1220.2017.01.003
|
|
|
| [10] |
王适存. 直升机空气动力学[M]. 南京: [s. n.], 1985: 45.
|
|
|
| [11] |
王进, 王向坤, 扶建辉, 等 重载机器人横梁结构静动态特性分析与优化[J]. 浙江大学学报:工学版, 2021, 55 (1): 124- 134
WANG Jin, WANG Xiang-kun, FU Jian-hui, et al Static and dynamic characteristic analysis and structure optimization for crossbeam structure of heavy-duty truss robot[J]. Journal Of Zhejiang University: Engineering Science, 2021, 55 (1): 124- 134
|
|
|
| [12] |
ABDULLAH K, DAVID W C, ALICE E S Multi-objective optimization using genetic algorithms: a tutorial[J]. Reliability Engineering and System Safety, 2005, 91 (9): 992- 1007
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|