|
|
|
| Fault-tolerant control based on adaptive neural network sliding mode observer |
Zheng-yin YANG( ),Jian HU*(),Jian-yong YAO,Ying-zhe SHA,Qiu-yu SONG ),Jian HU*(),Jian-yong YAO,Ying-zhe SHA,Qiu-yu SONG |
| College of Mechanical Engineering, Nanjing University of Science and Technology, Nanjing 210094, China |
|
|
|
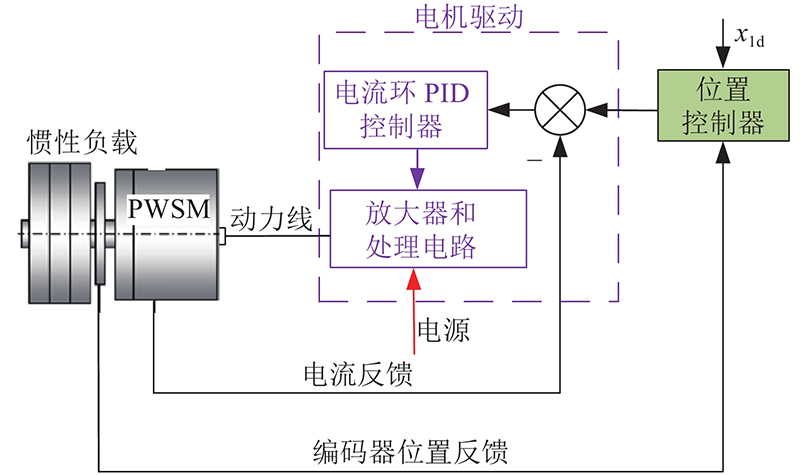
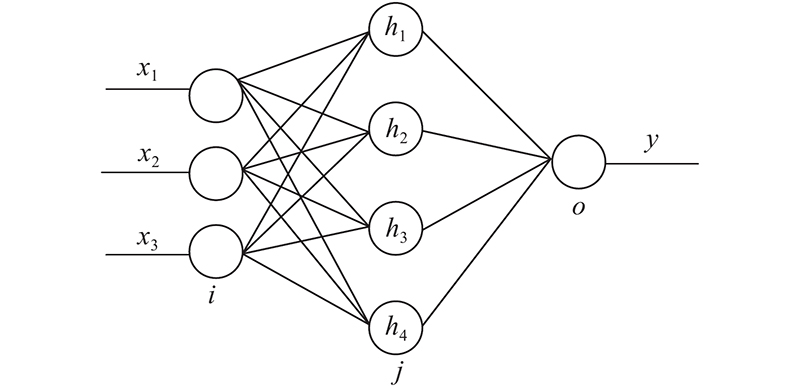
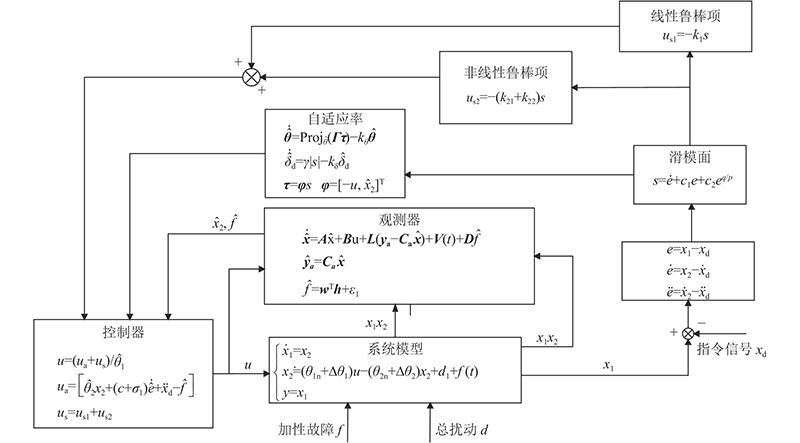
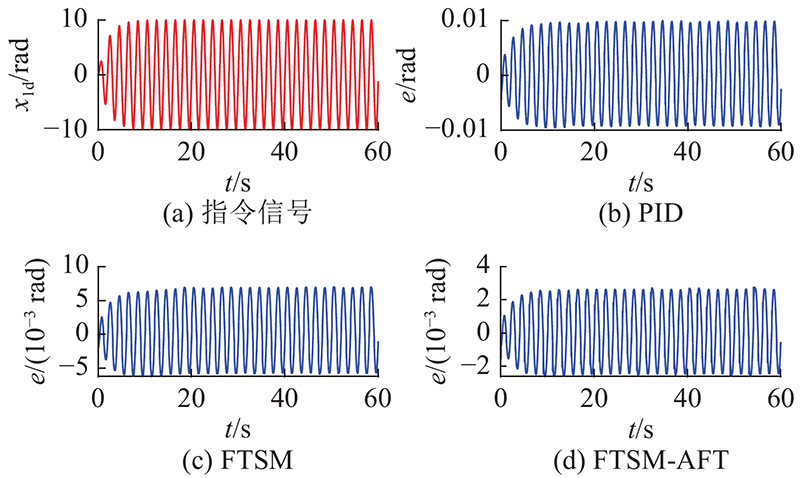
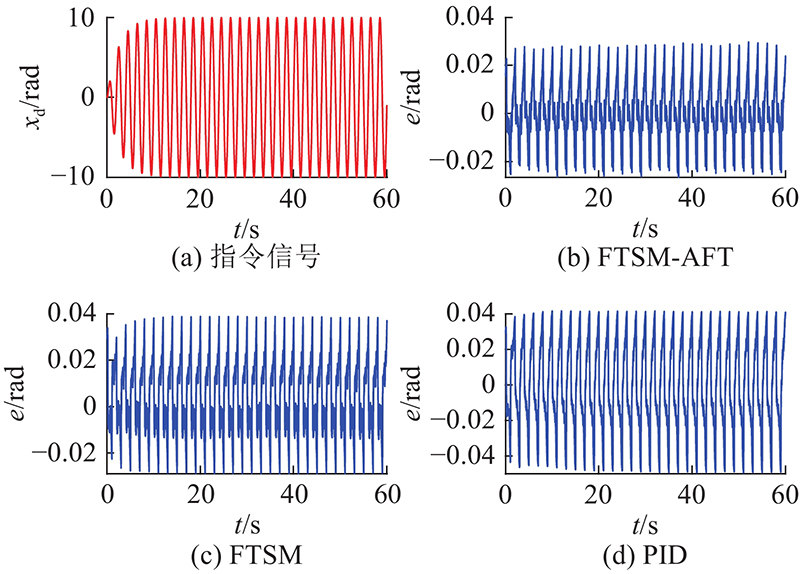
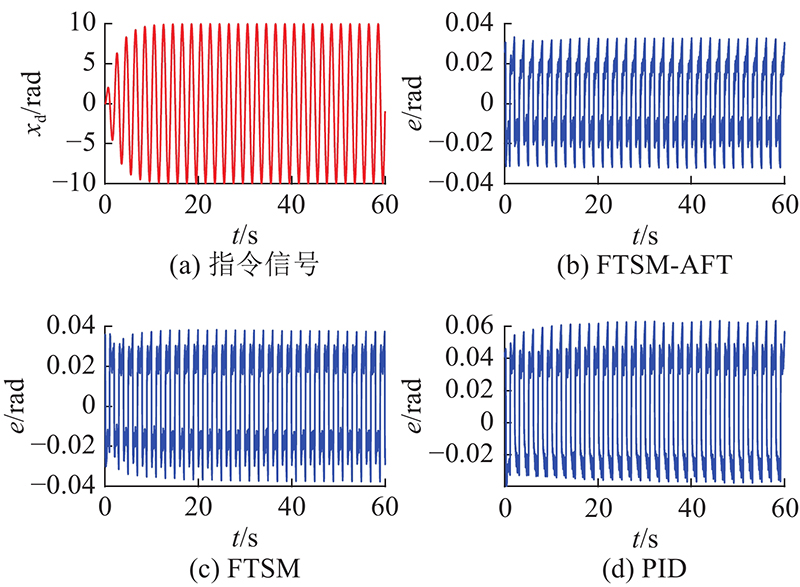
Abstract A fast terminal sliding mode fault-tolerant control strategy based on adaptive neural network sliding mode observer was proposed for the possible failure of electromechanical servo system. The neural network was introduced into the adaptive sliding mode observer to estimate the fault, so as to improve the accuracy of state estimation and fault diagnosis. An active fault-tolerant controller was designed by using the state estimation value of the observer, combining the parameter adaptive technology and the fast terminal sliding mode control method. The parameter adaptive rate was designed to estimate the parameter uncertainty, and the feedforward compensation technology was used to compensate the fault and parameter uncertainty. A robust term with adaptive gain was designed to overcome the disturbance of unknown upper bound. Using Lyapunov theorem, it is proved that the proposed control method can achieve bounded stability of the system. A large number of simulation and experimental results verify that the controller has good fault tolerance, control accuracy and response speed in case of system failure.
|
|
Received: 22 August 2021
Published: 30 August 2022
|
|
|
| Fund: 国家自然科学基金资助项目(51975294);高性能复杂制造国家重点实验室开放课题基金资助项目(Kfkt2019–11);中央高校基本科研业务费专项资金资助项目(30920010009) |
|
Corresponding Authors:
Jian HU
E-mail: 1546177016@qq.com;hujiannjust@163.com
|
基于自适应神经网络滑模观测器的容错控制
针对机电伺服系统可能发生的故障,提出基于自适应神经网络滑模观测器的快速终端滑模容错控制策略. 在自适应滑模观测器中引入神经网络估计故障,以提高故障发生时观测器的状态估计精度和故障检测准确性. 利用观测器的状态估计值进行状态重构,结合参数自适应技术和快速终端滑模控制方法设计主动容错控制器. 针对参数不确定性设计参数自适应率进行估计,并利用前馈补偿技术补偿故障和参数不确定性. 针对未知上界的扰动设计具有自适应增益的鲁棒项. 利用Lyapunov定理证明所提出的控制方法可以实现系统有界稳定,大量仿真和实验结果验证了控制器在系统发生故障时具有良好的容错能力、控制精度和响应速度.
关键词:
容错控制,
神经网络,
自适应滑模观测器,
故障估计,
快速终端滑模
|
|
| [1] |
刘育玮, 张航, 张振臻, 等 基于声信号的故障检测方法在运载火箭上的应用[J]. 火箭推进, 2021, 47 (3): 1- 7
LIU Yu-wei, ZHANG Hang, ZHANG Zhen-zhen, et al Application of fault detection method based on acoustic signal in launch vehicle[J]. Journal of Rocket Propulsion, 2021, 47 (3): 1- 7
doi: 10.3969/j.issn.1672-9374.2021.03.001
|
|
|
| [2] |
赵洪山, 董叶叶, 宋鹏, 等 基于模型的风电机组偏航系统故障检测方法[J]. 太阳能学报, 2020, 41 (5): 142- 149
ZHAO Hong-shan, DONG Ye-ye, SONG Peng, et al Fault detection method for yaw system of wind Turbine based on model[J]. Acta Energiae Solaris Sinica, 2020, 41 (5): 142- 149
|
|
|
| [3] |
于耕, 王寒, 赵龙 基于卡尔曼滤波的卫星地基增强系统位置域完好性监测分析[J]. 科学技术与工程, 2018, 18 (26): 243- 247
YU Geng, WANG Han, ZHAO Long Analysis on ground based augmentation system position domain integrity monitoring based on Kalman filtering[J]. Science Technology and Engineering, 2018, 18 (26): 243- 247
doi: 10.3969/j.issn.1671-1815.2018.26.038
|
|
|
| [4] |
ZHANG J, SHI P, LIN W Extended sliding mode observer basedcontrol for Markovian jump linear systems with disturbances[J]. Automatica, 2016, 70 (8): 140- 147
|
|
|
| [5] |
LIU Y H, PATTON R J, LAN J L Fault-tolerant individual pitch control using adaptive sliding mode observer[J]. IFAC PapersOnLine, 2018, 51 (24): 245- 253
|
|
|
| [6] |
MUHAMMAD T, LU X, MAQSOOD H, et al Adaptive rapid neural observer-based sensors fault diagnosis and reconstruction of quadrotor unmanned aerial vehicle[J]. Aircraft Engineering and Aerospace Technology, 2021, 93 (5): 847- 861
doi: 10.1108/AEAT-01-2021-0005
|
|
|
| [7] |
MOHAMED M, YAN X G, MAO Z H Adaptive sliding mode observer for nonlinear interconnected systems with time varying parameters[J]. Asian Journal of Control, 2019, 21 (1): 405- 414
doi: 10.1002/asjc.1960
|
|
|
| [8] |
YANG H Y, LUO H, KAYNA K Adaptive SMO-based fault estimation for markov jump systems with simultaneous additive and multiplicative actuator faults[J]. IEEE Systems Journal, 2020, 15 (7): 607- 616
|
|
|
| [9] |
ZHU Y K, QIAO J Z, GUO L Adaptive sliding mode disturbance observer-based composite control with prescribed performance of space manipulators for target capturing[J]. IEEE Transactions on Industrial Electronics, 2019, 66 (3): 1973- 1983
|
|
|
| [10] |
FARZIN P, MYON K J Bearing fault diagnosis by a robust higher-order super-twisting sliding mode observer[J]. Sensors, 2018, 18 (4): 1128- 1128
doi: 10.3390/s18041128
|
|
|
| [11] |
刘聪, 李颖晖, 吴辰, 等 基于鲁棒自适应滑模观测器的多故障重构[J]. 控制与决策, 2016, 31 (7): 1219- 1224
LIU Cong, LI Ying-hui, WU Chen, et al Design of the robust adaptive sliding mode observer for multiple fault reconstruction[J]. Control and Decision, 2016, 31 (7): 1219- 1224
doi: 10.13195/j.kzyjc.2015.0659
|
|
|
| [12] |
陶立权, 刘程, 王伟 基于自适应滑模观测器的航空发动机故障检测[J]. 计算机仿真, 2019, 36 (12): 67- 73
TAO Li-quan, LIU Cheng, WANG Wei Fault detection in aircraft engines based on adaptive sliding mode observer[J]. Computer Simulation, 2019, 36 (12): 67- 73
doi: 10.3969/j.issn.1006-9348.2019.12.014
|
|
|
| [13] |
穆凌霞, 余翔, 李平, 等 自适应广义滑模观测器之状态估计和故障重构[J]. 控制理论与应用, 2017, 34 (4): 483- 490
MU Ling-xia, YU Xiang, LI Ping, et al State estimation and fault reconstruction from an adaptive descriptor sliding mode observer[J]. Control Theory and Applications, 2017, 34 (4): 483- 490
|
|
|
| [14] |
刘聪, 李颖晖, 朱喜华, 等 基于自适应滑模观测器的不匹配非线性系统执行器故障重构[J]. 控制理论与应用, 2014, 31 (4): 431- 437
LIU Cong, LI Ying-hui, ZHU Xi-hua, et al Adaptive sliding-mode observer for actuator fault reconstruction in nonlinear system with mismatched uncertainties[J]. Control Theory and Applications, 2014, 31 (4): 431- 437
doi: 10.7641/CTA.2014.30952
|
|
|
| [15] |
沈毅, 李利亮, 王振华 航天器故障诊断与容错控制技术研究综述[J]. 宇航学报, 2020, 41 (6): 647- 656
SHEN Yi, LI Li-liang, WANG Zhen-hua A review of fault diagnosis and fault-tolerant control techniques for spacecraft[J]. Journal of Astronautics, 2020, 41 (6): 647- 656
doi: 10.3873/j.issn.1000-1328.2020.06.002
|
|
|
| [16] |
GAYAKA S, YAO B Output feedback based adaptive robust fault tolerant control for a class ofuncertain nonlinear systems[J]. Journal of Systems Engineering and Electronics, 2011, 22 (1): 38- 51
doi: 10.3969/j.issn.1004-4132.2011.01.005
|
|
|
| [17] |
WANG F Z, YAO B Guaranteed cost fault-tolerant control for a class of uncertain linear system[J]. Systems Engineering and Electronics, 2004, 26 (5): 636- 640
|
|
|
| [18] |
GAO M Z, YAO J Y Adaptive fault-tolerant attitude control for reentry vehicle involving actuator saturation[J]. Proceedings of the Institution of Mechanical Engineers Part G-Journal of Aerospace Engineering, 2019, 233 (11): 3968- 3982
doi: 10.1177/0954410018811715
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|