| Aerospace Technology |
|


|
|
|
| Design and plunge-diving analysis of underwater-aerial transmedia vehicle of bionic kingfisher |
Zhong YUN1( ),Meng WEN1(),Zi-rong LUO2,Long CHEN1 ),Meng WEN1(),Zi-rong LUO2,Long CHEN1 |
1. College of Mechanical and Electrical Engineering, Central South University, Changsha 410083, China
2. School of Intelligent Science, National University of Defense Technology, Changsha 410008, China |
|
|
|
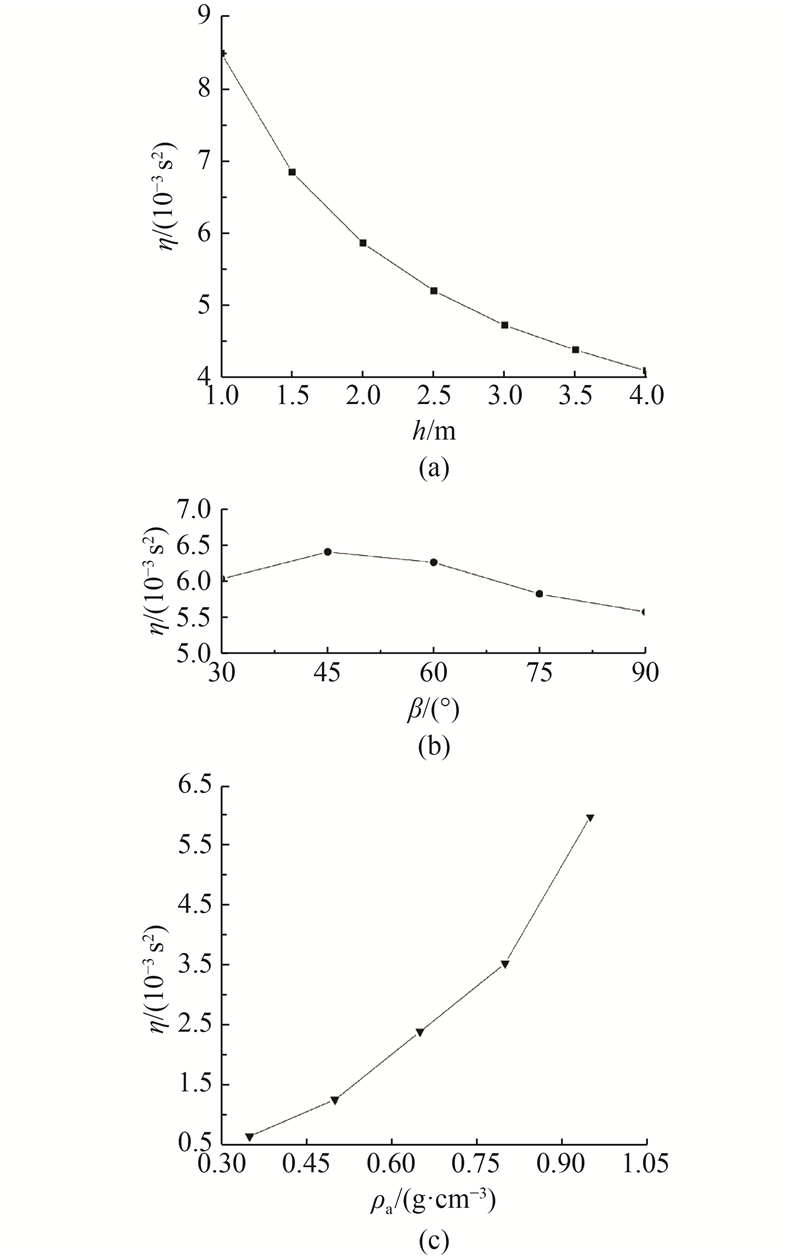
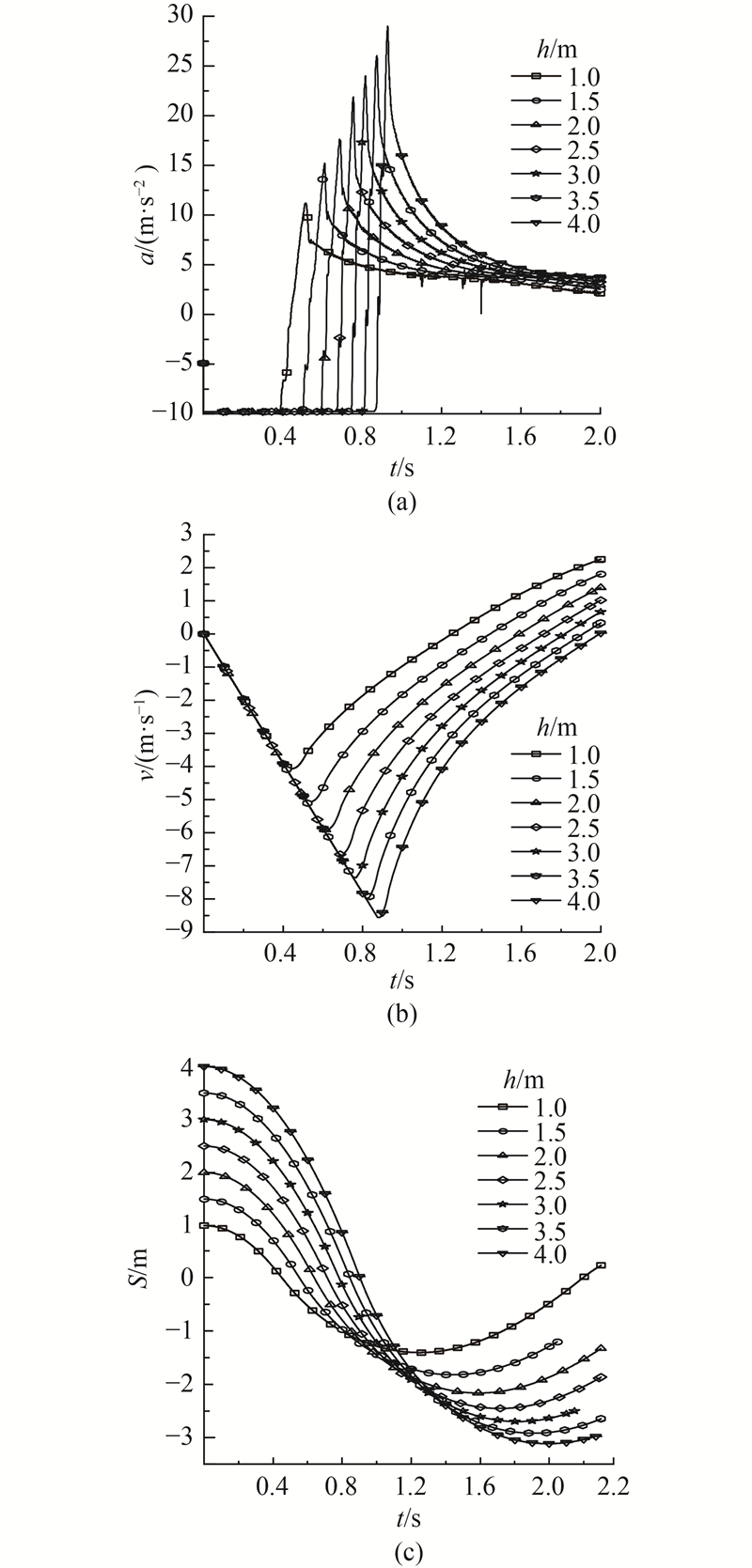
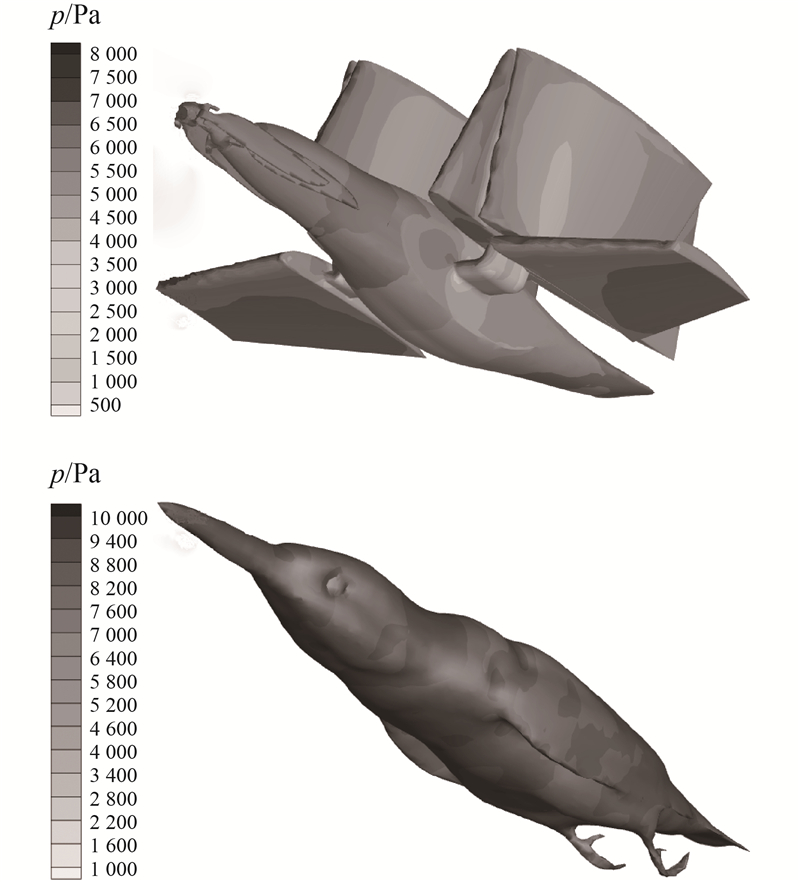
Abstract A underwater-aerial transmedia vehicle of bionic kingfisher driven by a single power source was designed, in order to meet the propulsion requirements of underwater-aerial transmedia vehicle and simplify its power system. The effects of key influencing factors, such as water-inlet height, water-inlet angle and density of aircraft, on the dynamic performance such as water-inlet speed, depth and impact acceleration of the vehicle were analyzed by the computational fluid dynamics (CFD) software, and the simulated results were compared with the water-inlet performance of the natural kingfisher. Results show that increasing the water-inlet height will increase the ratio of the impact acceleration increment and the water-inlet depth increment of the aircraft when the water-inlet angle is fixed, thereby increasing the structural strength requirement under the same conditions. The increase in the density of the aircraft within a certain range is conducive to reducing the structural strength requirements, and the minimum structural strength required is obtained when the water-inlet angle is 45~60 degree. When the water-inlet depth meets the requirements, the density of the aircraft should be appropriately increased and the water-inlet height should be reduced, and the optimal water-inlet angle of the aircraft is 45~60 degree.
|
|
Received: 05 January 2019
Published: 10 March 2020
|
|
|
仿翠鸟水空跨介质航行器设计与入水分析
为了满足水空跨介质航行器的推进需求,精简其动力系统,仿翠鸟设计由单一动力源驱动的水空跨介质航行器. 通过计算流体力学(CFD)软件仿真分析入水高度、入水角度和航行器密度等关键影响因素对航行器入水速度、深度和冲击加速度等动力学性能的影响,并与自然界翠鸟的入水性能进行对比. 结果表明:在入水角度一定时,增加入水高度将导致航行器所受的冲击加速度增量与入水深度增量的比值增大,从而提高相同条件下对结构强度的要求;在一定范围内航行器密度的增加有利于降低对结构强度的要求;当入水角度约为45°~60°时,所需结构强度最低. 在入水深度满足要求的情况下,应适当增大航行器的密度、减小入水高度,且航行器的最佳入水角度为45°~60°.
关键词:
仿生翠鸟,
水空跨介质航行器,
动力系统,
入水性能,
数值仿真
|
|
| [1] |
何肇雄, 郑震山, 马东立, 等 国外跨介质飞行器发展历程及启示[J]. 舰船科学技术, 2016, 38 (5): 152- 157
HE Zhao-xiong, ZHENG Zhen-shan, MA Dong-li, et al Development of foreign trans-media aircraft and its enlightenment to China[J]. Ship Science and Technology, 2016, 38 (5): 152- 157
doi: 10.3404/j.issn.1672-7619.2016.05.032
|
|
|
| [2] |
杨兴帮, 梁建宏, 文力, 等 水空两栖跨介质无人飞行器研究现状[J]. 机器人, 2018, 40 (1): 102- 114
YANY Xing-bang, LIANG Jian-hong, WEN Li, et al Research status of water-air amphibious trans-media unmanned vehicle[J]. Robot, 2018, 40 (1): 102- 114
|
|
|
| [3] |
钟宏伟 国外无人水下航行器装备与技术现状及展望[J]. 水下无人系统学报, 2017, 25 (3): 215- 225
ZHONG Hong-wei Review and prospect of equipment and techniques for unmanned undersea vehicle in foreign countries[J]. Journal of Unmanned Undersea Systems, 2017, 25 (3): 215- 225
|
|
|
| [4] |
潘光, 宋保维, 黄桥高, 等 水下无人系统发展现状及其关键技术[J]. 水下无人系统学报, 2017, 25 (1): 44- 51
PAN Guang, SONG Bao-wei, HUANG Qiao-gao, et al Development and key techniques of unmanned undersea system[J]. Journal of Unmanned Undersea Systems, 2017, 25 (1): 44- 51
|
|
|
| [5] |
ZIMMERMAN S, ABDELKEFI A Review of marine animals and bioinspired robotic vehicles: classifications and characteristics[J]. Progress in Aerospace Sciences, 2017, 93: 95- 119
doi: 10.1016/j.paerosci.2017.07.005
|
|
|
| [6] |
姜琬, 贾重任, 卢芳春.仿生系列跨介质新概念飞行器气水动布局设计[C]//中国航空学会青年科技论坛.沈阳: 中国学术期刊电子出版社, 2014: 54-60.
JIANG WAN, JIA Zhong-ren, LU Fang-chun. Aerodynamic and hydrodynamic configuration design of bionic series transmedia new concept aircraft [C]// China Aviation Society Youth Science and Technology Forum. Shenyang: China Academic Journal Electronic Publishing House, 2014: 54-60.
|
|
|
| [7] |
GAO A, TECHET A H. Design considerations for a robotic flying fish [C]// Oceans. Waikoloa: IEEE, 2011: 1-8.
|
|
|
| [8] |
LOCK R J, VAIDYANATHAN R, BURGESS S C, et al Development of a biologically inspired multi-modal wing model for aerial-aquatic robotic vehicles through empirical and numerical modelling of the common guillemot, Uria aalge[J]. Bioinspiration and Biomimetics, 2010, 5 (4): 1- 15
|
|
|
| [9] |
LOCK R J, PEIRIS B H P M, BATES S, et al. Quantification of the benefits of a compliant foil for underwater flapping wing propulsion [C]// ASME International Conference on Advanced Intelligent Mechatronics. Budapest: IEEE, 2011: 898-903.
|
|
|
| [10] |
RICHARD J. A biologically-inspired multi-modal wing for aerial-aquatic robotic vehicles [D]. Bristol: University of Bristol, 2011.
|
|
|
| [11] |
LOCK R J, VAIDYANATHAN R, BURGESS S C. Design and experimental verification of a biologically inspired multi-modal wing for aerial-aquatic robotic vehicles [C]// The 4th IEEE RAS/EMBS International Conference on Biomedical Robotics and Biomechatronics. Rome: IEEE, 2012: 681-687.
|
|
|
| [12] |
LOCK R J, VAIDYANATHAN R, BURGESS S C Impact of marine locomotion constraints on a bio-inspired aerial-aquatic wing: experimental performance verification[J]. Journal of Mechanisms and Robotics, 2014, 6 (1): 1- 10
|
|
|
| [13] |
SIDDALL R, ANCEL A O, KOVA? M Wind and water tunnel testing of a morphing aquatic micro air vehicle[J]. Interface Focus, 2017, 7 (1): 20160085
doi: 10.1098/rsfs.2016.0085
|
|
|
| [14] |
YANG X, LIANG J, WANG T, et al. Computational simulation of a submersible unmanned aerial vehicle impacting with water [C]// IEEE International Conference on Robotics and Biomimetics. Shenzhen: IEEE, 2013: 1138-1143.
|
|
|
| [15] |
WANG T M, YANG X B, LIANG J H, et al CFD based investigation on the impact acceleration when a gannet impacts with water during plunge diving[J]. Bioinspiration and Biomimetics, 2013, 8 (3): 036006
doi: 10.1088/1748-3182/8/3/036006
|
|
|
| [16] |
YANG X, WANG T, LIANG J, et al. Numerical analysis of biomimetic gannet impacting with water during plunge-diving [C]// IEEE International Conference on Robotics and Biomimetics. Guangzhou: IEEE, 2012: 569-574.
|
|
|
| [17] |
YAO G, LIANG J, WANG T, et al. Submersible unmanned flying boat: design and experiment [C]// IEEE International Conference on Robotics and Biomimetics. Bali: IEEE, 2014: 1308-1313.
|
|
|
| [18] |
LIANG J, YANG X, WANG T, et al Design and experiment of a bionic gannet for plunge-diving[J]. Journal of Bionic Engineering, 2013, 10 (3): 282- 291
doi: 10.1016/S1672-6529(13)60224-3
|
|
|
| [19] |
LIANG J H, YAO G C, WANG T M, et al Wing load investigation of the plunge-diving locomotion of a gannet morus inspired submersible aircraft[J]. Science China: Technological Sciences, 2014, 57 (2): 390- 402
doi: 10.1007/s11431-013-5437-5
|
|
|
| [20] |
YANG X, WANG T, LIANG J, et al. Submersible unmanned aerial vehicle concept design study [C]// the Aviation Technology, Integration, and Operations Conference. Los Angeles: American Institute of Aeronautics and Astronautics, 2013: 4422.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|