|
|
|
| Design and hydrodynamic analysis of pectoral fin oscillation propulsion mechanism of bionic manta ray |
Zhong YUN( ),Meng WEN,Yi JIANG,Long CHEN,Long-fei FENG ),Meng WEN,Yi JIANG,Long CHEN,Long-fei FENG |
| College of Mechanical and Electrical Engineering, Central South University, Changsha 410083, China |
|
|
|
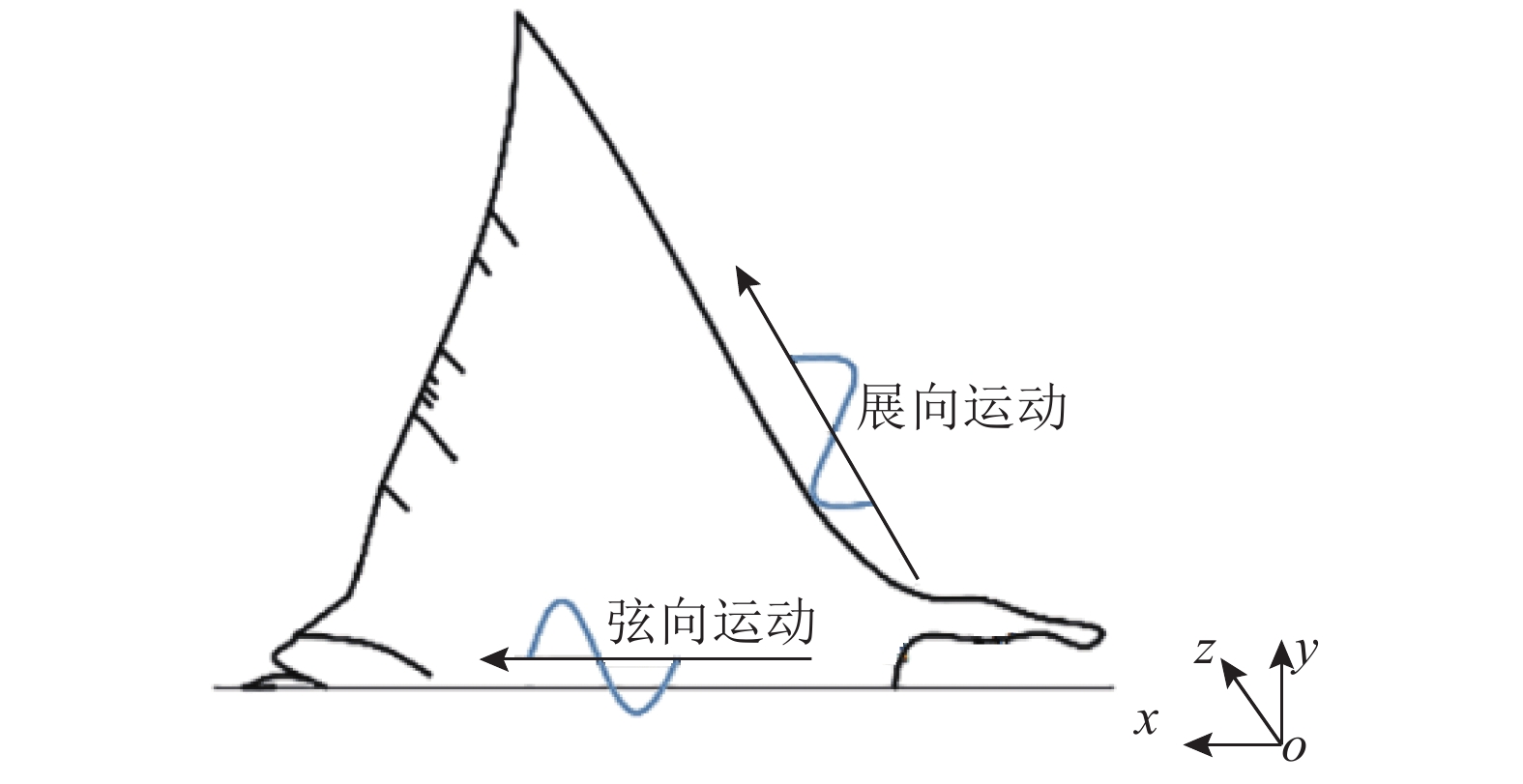
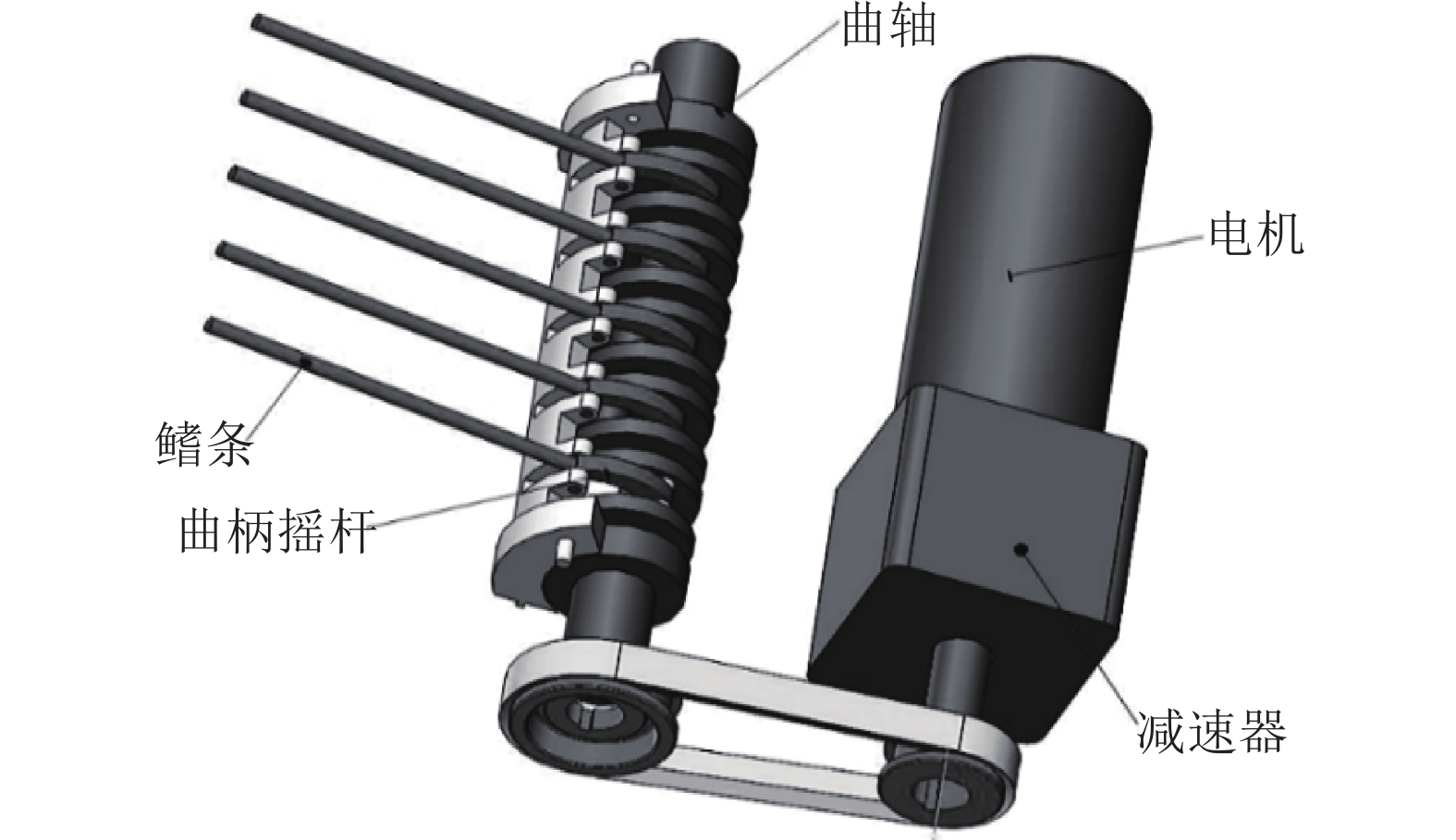
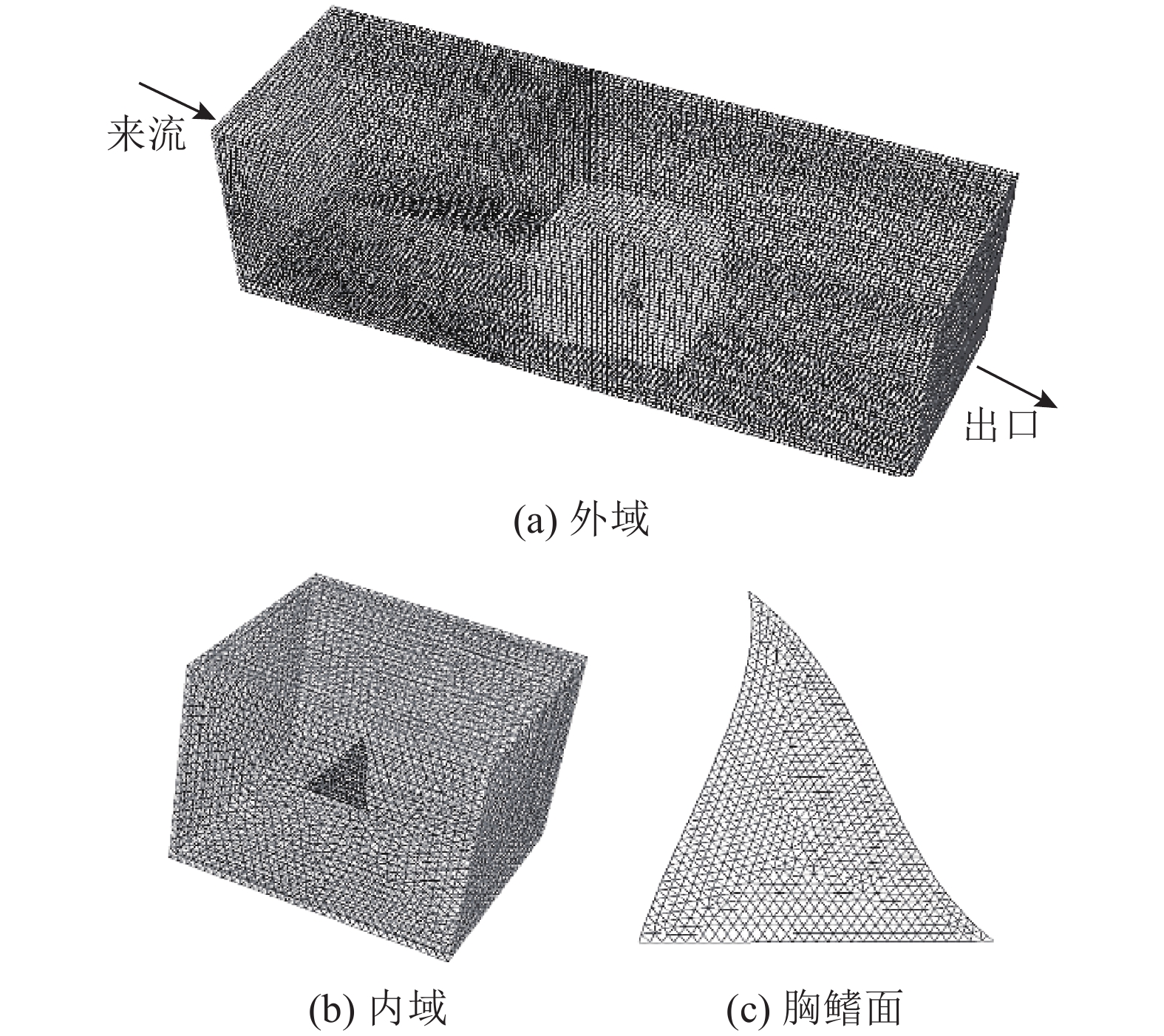
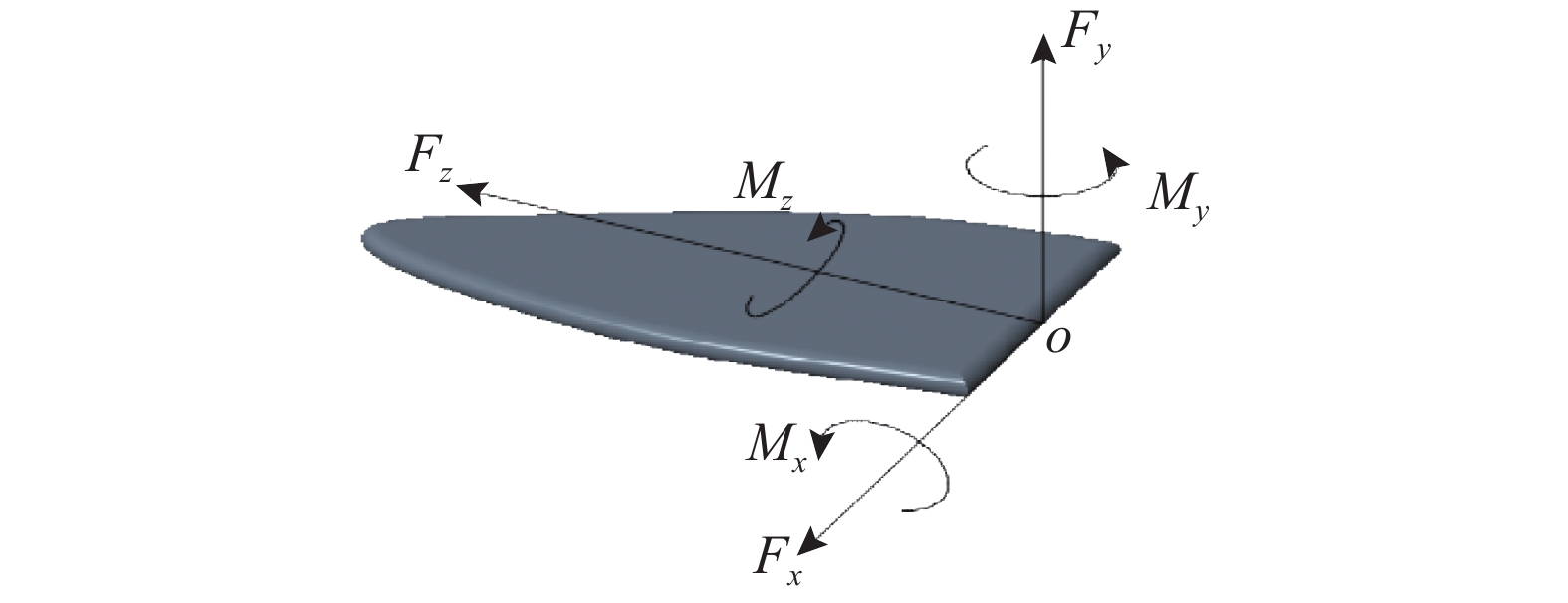
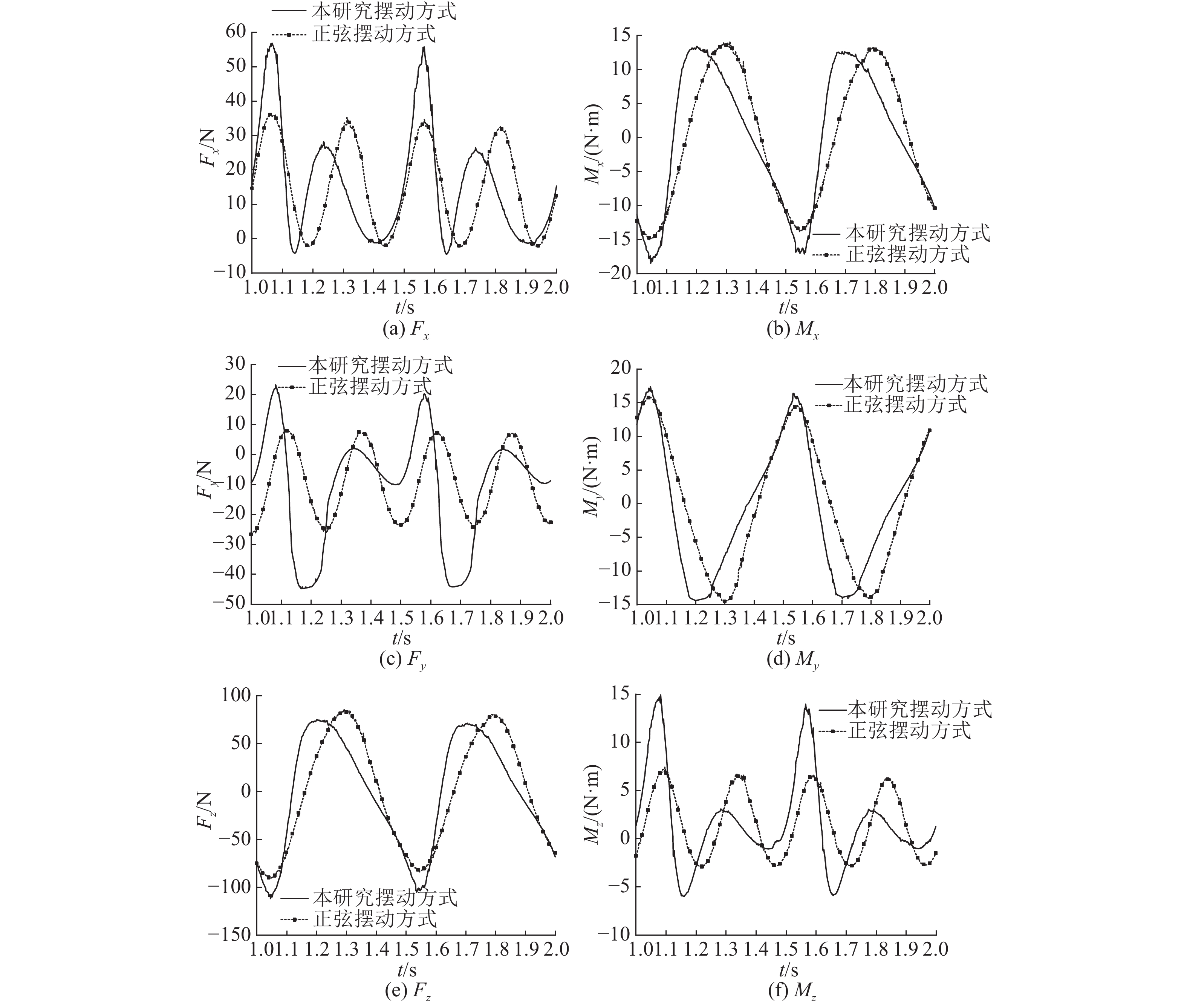
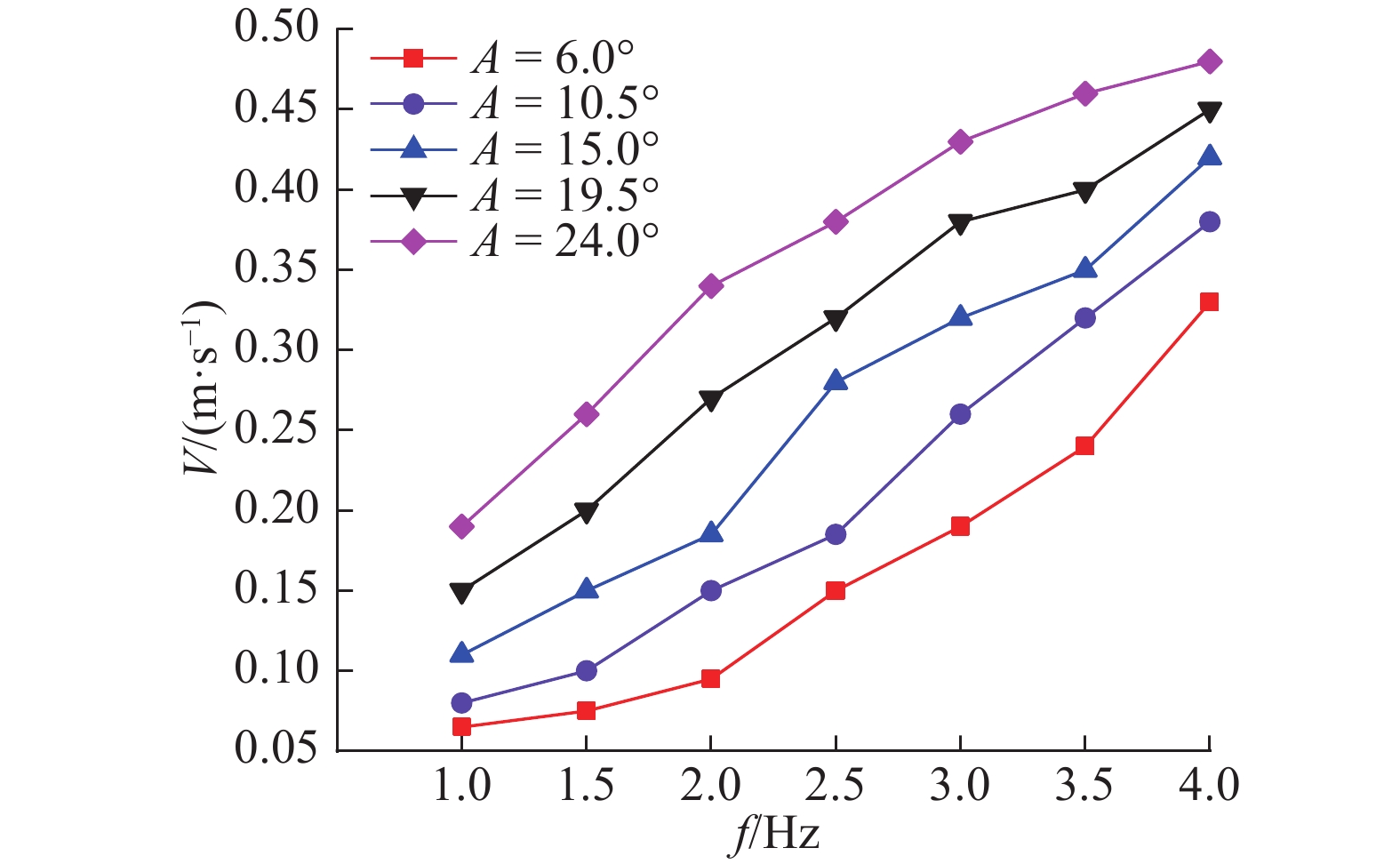
Abstract A bionic pectoral fin oscillation propulsion mechanism of manta ray and its swing mode were designed to improve the propulsive efficiency of unmanned undersea vehicle (UUV). A crankshaft joint crank rocker mechanism, which achieved mutual decoupling between swing amplitude and jerk factor, was designed to achieve the specific swing mode of the bionic pectoral fin, based on the study of the pectoral fin movement mechanism of manta rays. The motion equation of the bionic pectoral fin was derived and established, and the hydrodynamic performance of unilateral pectoral fin in the swing mode was analyzed by numerical simulation, and the superiority of this swing mode relative to the sine swing mode was verified according to the set propulsion performance evaluation index. The advancement and steering performance of the device was verified by the experiments, and the relationship between the amplitude and frequency of the pectoral fin swing as well as the speed of the device was analyzed. Experimental results showed that the bionic pectoral fin oscillation propulsion mechanism can realize the predetermined movement of UUV, such as advancement and steering, and meet the basic propulsion requirements.
|
|
Received: 30 March 2018
Published: 17 May 2019
|
|
|
仿生蝠鲼胸鳍摆动推进机构设计与水动力分析
为了提高水下无人航行器推进系统效率,设计仿生蝠鲼胸鳍摆动推进机构及其摆动形式. 在研究蝠鲼胸鳍运动机理的基础上,设计摆动幅值与急回系数相互解耦的曲轴联合曲柄摆杆机构,以实现仿生胸鳍的特定摆动形式. 推导并建立仿生胸鳍的鳍面运动方程,利用数值仿真分析单侧胸鳍在该摆动形式下的水动力特性,根据设定的推进性能评价指标说明该摆动形式相对正弦摆动形式的优越性. 通过实验验证装置的前进、转向等运动性能,分析胸鳍摆动幅值、频率与运动速度的关系. 结果表明,在特定的摆动形式下,该仿生胸鳍摆动推进机构能够实现水下无人航行器的前进、转向等预定运动,满足基本推进要求.
关键词:
仿生蝠鲼,
胸鳍摆动推进,
数值仿真,
性能分析,
Fluent
|
|
| [1] |
王扬威, 王振龙, 李健 仿生机器鱼研究进展及发展趋势[J]. 机械设计与研究, 2011, 27 (2): 22- 25
WANG Yang-wei, WANG Zhen-long, LI Jian Research development and tendency of biomimetic robot fish[J]. Machine Design and Research, 2011, 27 (2): 22- 25
|
|
|
| [2] |
ROSENBERGER L J Pectoral fin locomotion in batoid fishes: undulation versus oscillation[J]. Journal of Experimental Biology, 2001, 204 (2): 379- 394
|
|
|
| [3] |
DEWEY P A, ANTOINE C, SMITS A J On the relationship between efficiency and wake structure of a batoid-inspired oscillating fin[J]. Journal of Fluid Mechanics, 2012, 691 (1): 245- 266
|
|
|
| [4] |
WALKER J A, WESTNEAT M W Performance limits of labriform propulsion and correlates with fin shape and motion[J]. Journal of Experimental Biology, 2002, 205 (2): 177- 187
|
|
|
| [5] |
CLARK R, SMITS A. Visualizations of the unsteady wake of manta ray model [C]// 44th AIAA Aerospace Sciences Melting and Exhibit. Reno Nevada: AIAA, 2006: 1-8.
|
|
|
| [6] |
李吉, 毕树生, 高俊, 等 仿生蝠鲼机器鱼BH-RAY3的研制及水力实验[J]. 控制工程, 2010, 17 (1): 127- 130
LI Ji, BI Shu-sheng, GAO Jun, et al Development and hydrodynamics experiments of robotic manta ray BH-RAY3[J]. Control Engineering of China, 2010, 17 (1): 127- 130
|
|
|
| [7] |
WANG Z, WANG Y, LI J, et al. A micro biomimetic manta ray robot fish actuated by SMA [C]// IEEE International Conference on Robotics and Biomimetics. Guilin: IEEE, 2010: 1809-1813.
|
|
|
| [8] |
王扬威, 王振龙, 李健, 等 形状记忆合金驱动仿生蝠鲼机器鱼的设计[J]. 机器人, 2010, 32 (2): 256- 261
WANG Yang-wei, WANG Zhen-long, LI Jian, et al Development of a biomimetic manta ray robot fish actuated by shape memory alloy[J]. Robot, 2010, 32 (2): 256- 261
|
|
|
| [9] |
王扬威, 闫勇程, 刘凯, 等 仿生机器魟鱼研制与游动性能实验研究[J]. 浙江大学学报: 工学版, 2017, 51 (1): 106- 112
WANG Yang-wei, YAN Yong-cheng, LIU Kai, et al Development and swimming experimental research on bionic stingray robot[J]. Journal of Zhejiang University: Engineering Science, 2017, 51 (1): 106- 112
|
|
|
| [10] |
CHEN Z, UM Ti, BART-SMITH H. Ionic polymer-metal composite enabled robotic manta ray [C]// Proceedings of Society of Photo-Optical Instrumentation Engineers. San Diego: SPIE, 2011: 797637-797649.
|
|
|
| [11] |
CHEN Z, BART-SMITH T I U, HILARY Bio-inspired robotic manta ray powered by ionic polymermetal composite artificial muscles[J]. International Journal of Smart and Nano Materials, 2012, 3 (4): 296- 308
doi: 10.1080/19475411.2012.686458
|
|
|
| [12] |
ZHOU C, LOW K H Better endurance and load capacity: an improved design of manta ray robot: RoMan-Ⅱ[J]. Journal of Bionic Engineering, 2010, 7 (3): 137- 144
|
|
|
| [13] |
ZHOU C, LOW K H Design and locomotion control of a biomimetic underwater vehicle with fin propulsion[J]. ASME Transactions on Mechatronics, 2012, 17 (1): 25- 35
doi: 10.1109/TMECH.2011.2175004
|
|
|
| [14] |
LOW K H, ZHOU C, SEET G, et al. Improvement and testing of a robotic manta ray: RoMan-Ⅲ [C]// IEEE International Conference on Robotics and Biomimetics. Phuket: IEEE, 2012: 1730-1735.
|
|
|
| [15] |
GAO J, BI S, XU Y, et al. Development and design of a robotic manta ray featuring flexible pectoral fins [C]// IEEE International Conference on Robotics and Biomimetics. Sanya: IEEE, 2008: 519-523.
|
|
|
| [16] |
CHEW C M, LIM Q Y, YEO K S. Development of propulsion mechanism for robot manta ray [C]// IEEE International Conference on Robotics and Biomimetics. Zhuhai: IEEE, 2016: 1918-1923.
|
|
|
| [17] |
WANG Z, YU J, ZHANG A. Hydrodynamic performance analysis of a biomimetic manta ray underwater glider [C]// IEEE International Conference on Robotics and Biomimetics. Qingdao: IEEE, 2016: 1631-1636.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|