| Aerospace Technology |
|


|
|
|
| Driving and load performances of pneumatic soft self-folding manipulators |
Yan XU( ),Qin FANG,Chao ZHANG,Hong-wei LI ),Qin FANG,Chao ZHANG,Hong-wei LI |
| School of Aeronautics and Astronautics, Zhejiang University, Hangzhou 310027, China |
|
|
|
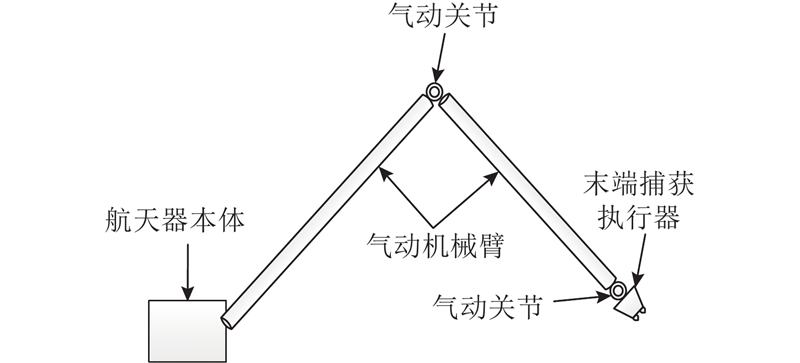
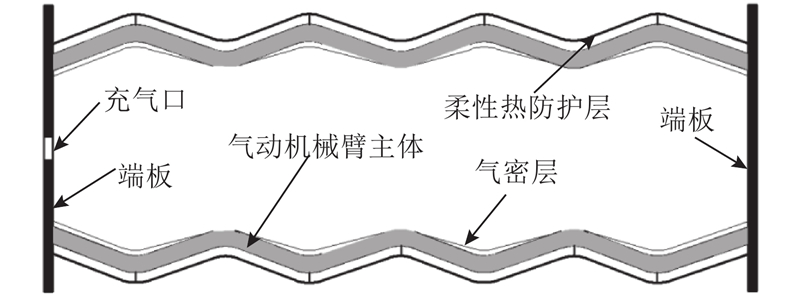
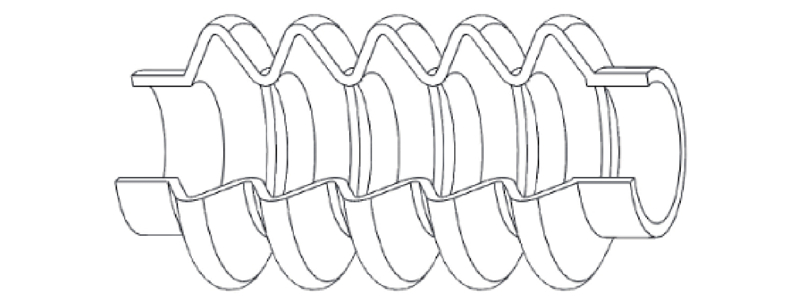
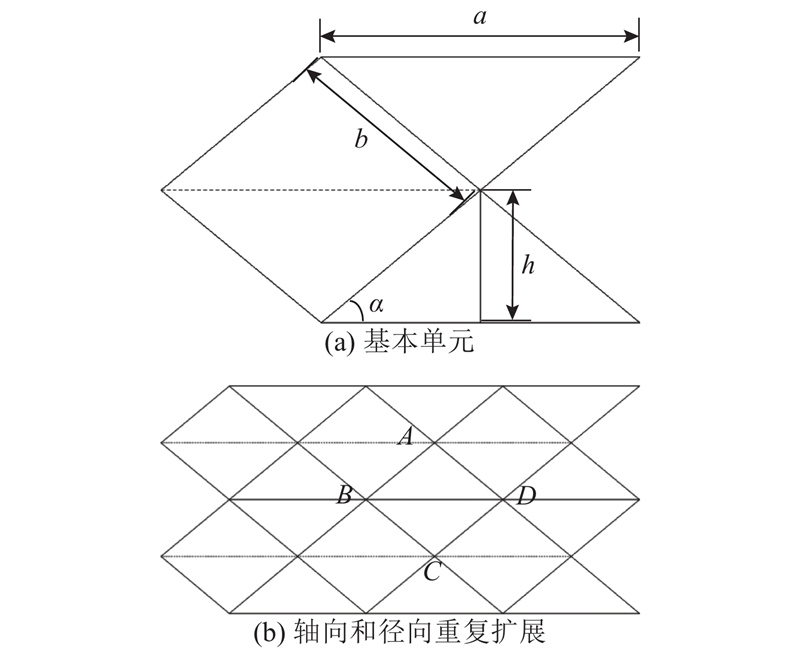
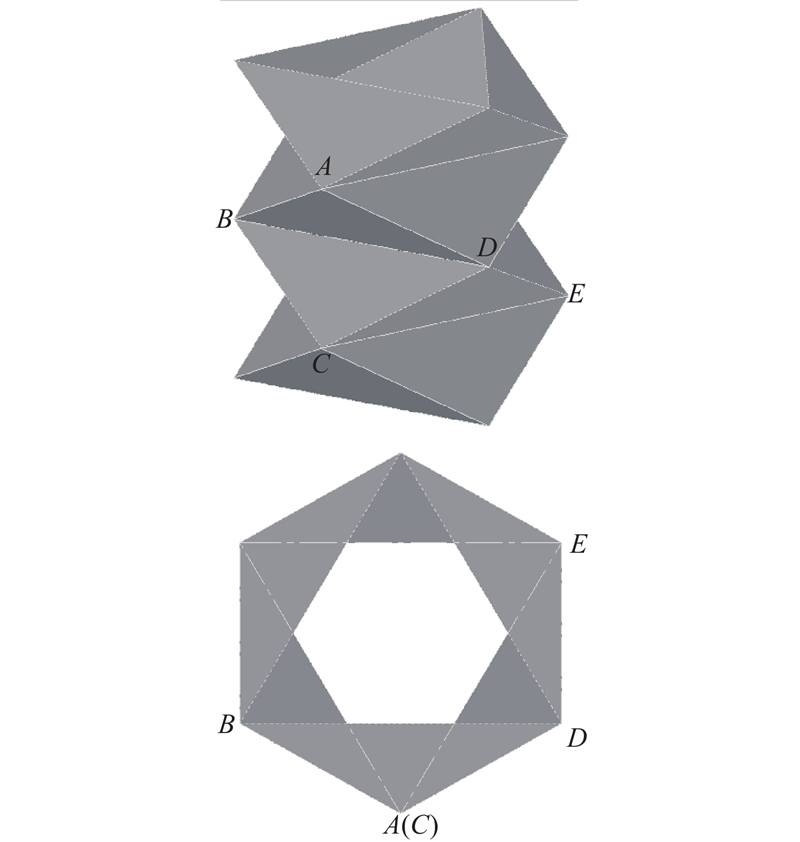
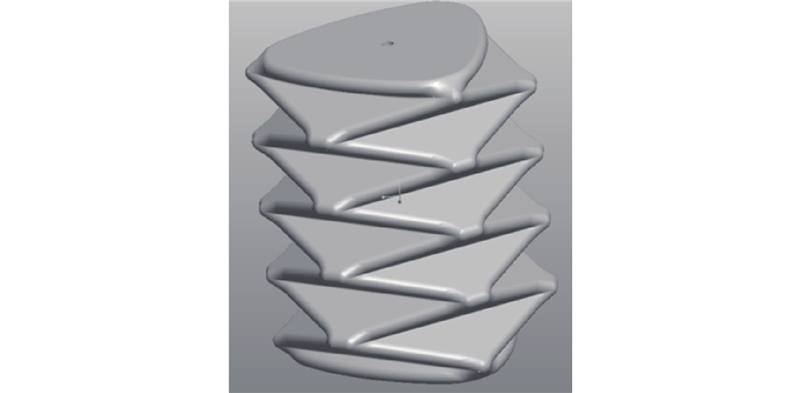
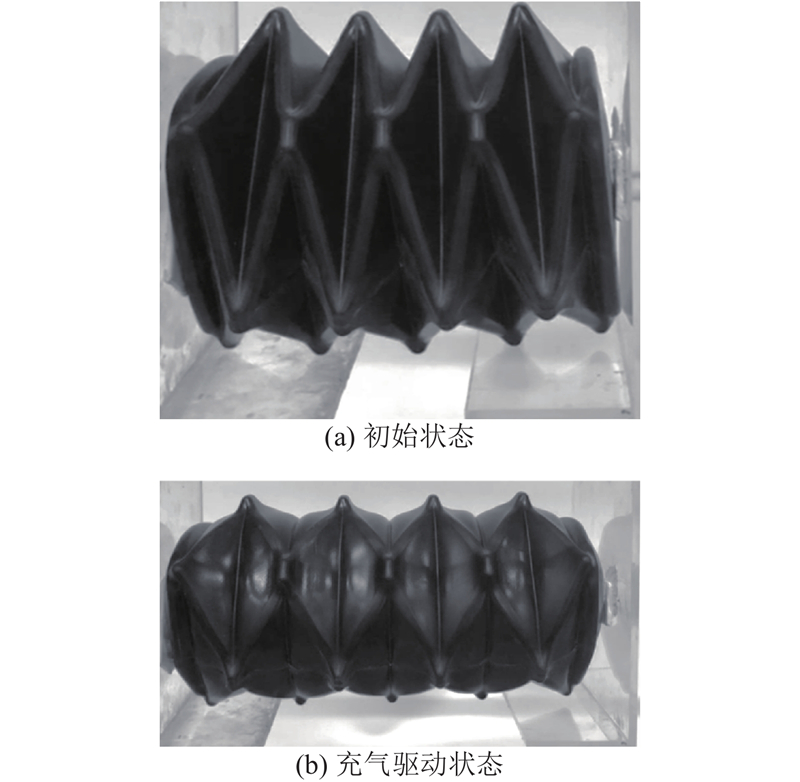
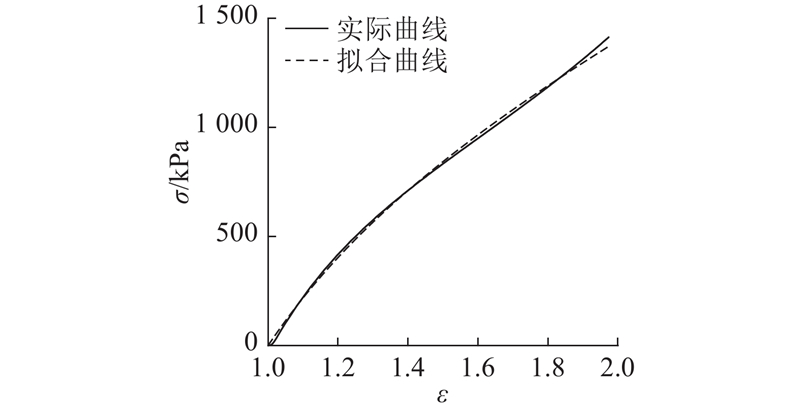
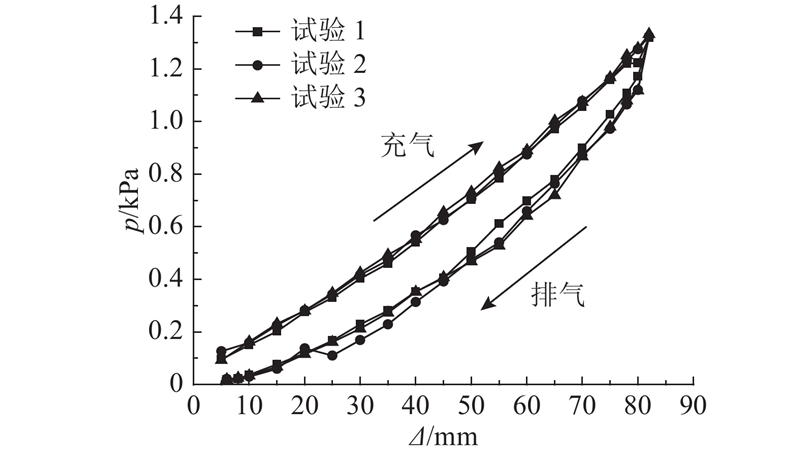
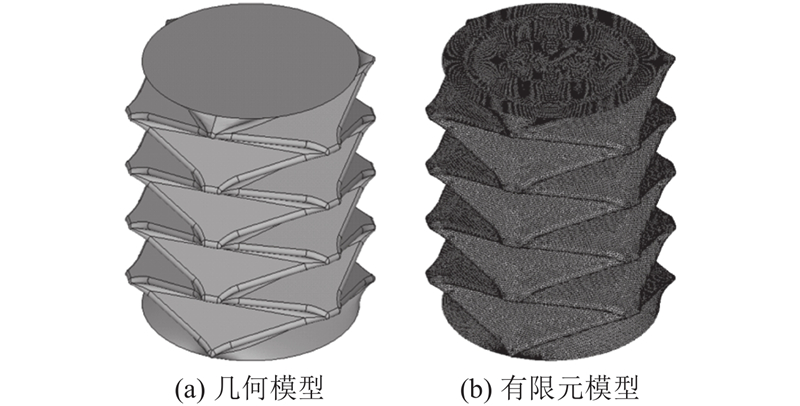
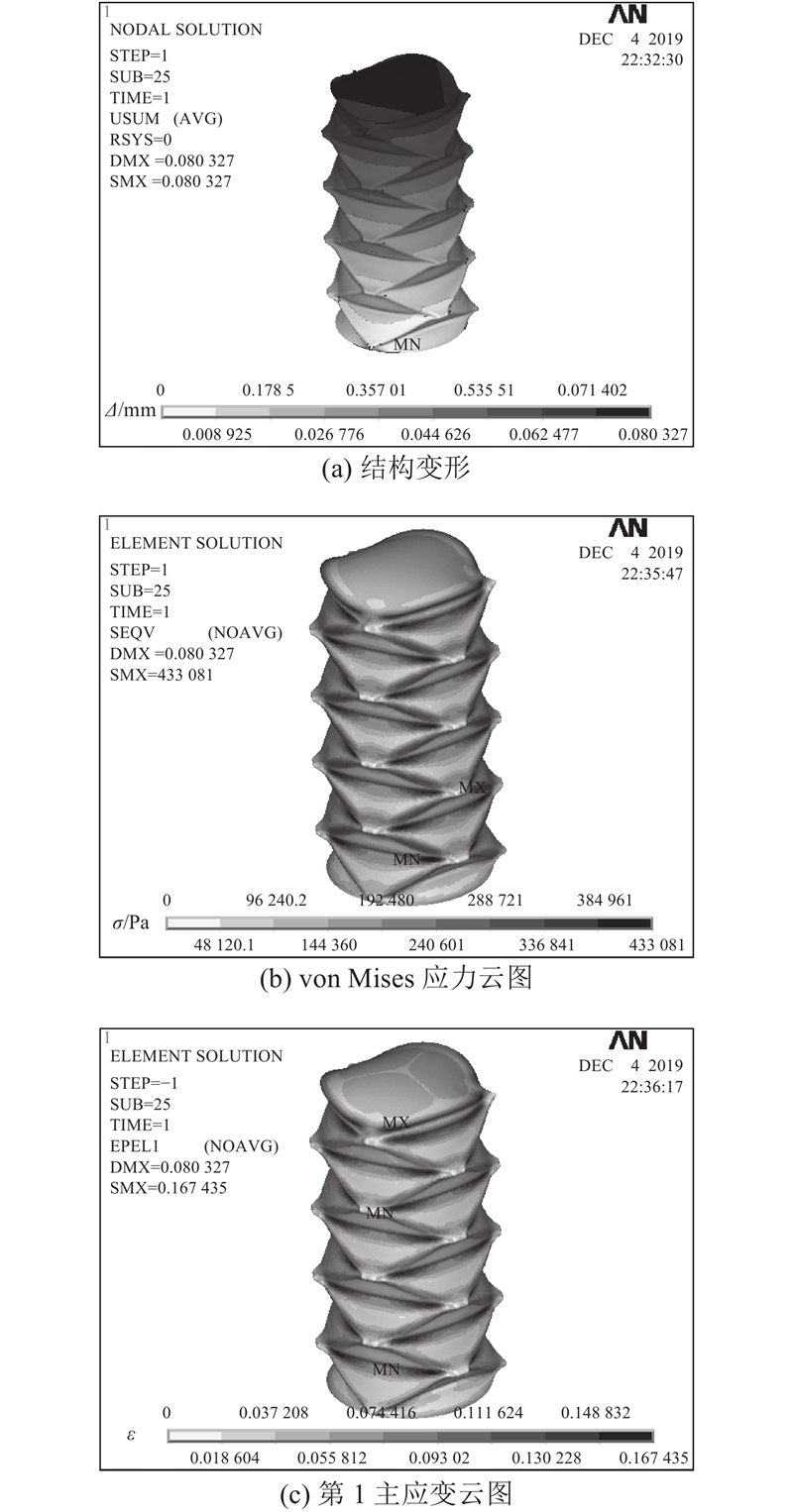
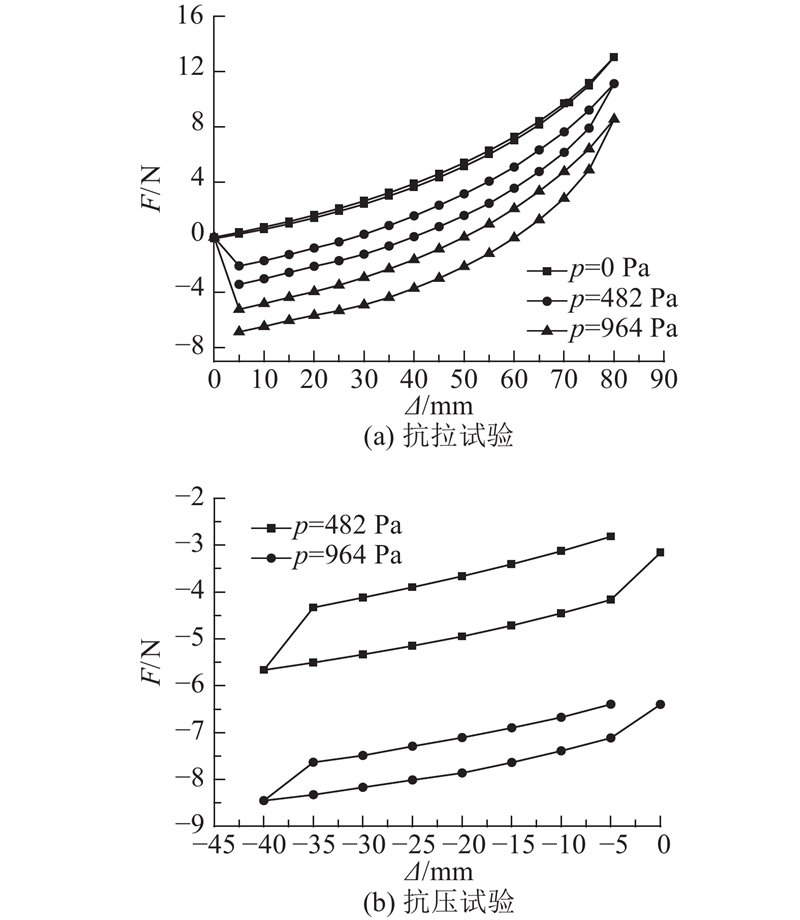
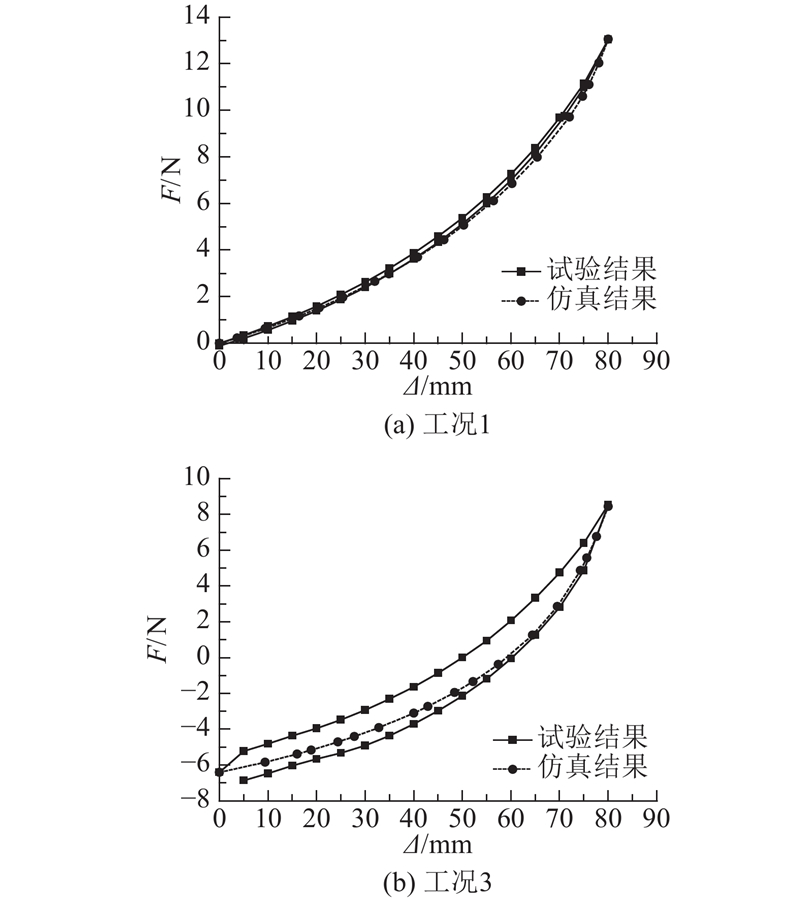
Abstract A space soft capture robot composed of pneumatic self-folding manipulators and pneumatic joints was presented. The initial structural configuration of the pneumatic self-folding manipulators was designed based on the origami theory. The driving mechanism and load performance of the pneumatic self-folding manipulators were investigated. The inflated drive tests of the pneumatic manipulators were conducted and the pressure-elongation curves were obtained. The large deformations and stress/strain distributions of the manipulators were analyzed based on the nonlinear finite element method. Results show that the curves of both the inflated stage and the exhaust stage are nonlinear, and the hysteresis curves are obvious in the whole driving process. Thus, the driving mechanisms of inflated expansion and exhaust self-folding can be verified. The load performances of the pneumatic manipulators were evaluated by load performance test and simulation analysis. As the design pressure increases, the tensile load capacity decreases and the area of hysteresis cycle increases, while the compressive load capacity increases and the area of hysteresis cycle decreases. The pneumatic self-folding manipulators provide technical supports for the realization of space soft capture robots.
|
|
Received: 19 August 2019
Published: 10 March 2020
|
|
|
气动软体自折叠机械臂的驱动和负载性能
提出由气动自折叠机械臂和气动关节构成的全软体空间捕获机器人方案. 基于折纸理论设计气动自折叠机械臂结构初始构型,研究气动自折叠机械臂的驱动特性和负载性能;进行气动机械臂的充气驱动试验,得到气压-伸长量关系曲线;基于非线性有限元法,分析气动机械臂驱动过程的大变形和应力应变分布. 结果表明,充气段和排气段的曲线均呈非线性变化,整个驱动过程的滞回曲线明显,验证了其充气驱动-排气自折叠的驱动特性. 通过负载能力试验和仿真分析,评估气动机械臂的负载能力. 随着设计气压不断变大,拉伸负载能力变小,滞回环变大,而抗压负载能力变大,滞回环变小. 所研究的气动自折叠机械臂为实现全软体空间捕获机器人提供技术支撑.
关键词:
气动软体机械臂,
自折叠,
折纸,
驱动特性,
负载能力
|
|
| [1] |
RICCARDO B, MICHELE L, SAMUELE S Multibody dynamics driving GNC and system design in tethered nets for active debris removal[J]. Advances in Space Research, 2016, 58: 45- 63
doi: 10.1016/j.asr.2016.04.015
|
|
|
| [2] |
REINTSEMA D, THAETER J, RATHKE A, et al. Deos-the German robotics approach to secure and de-orbit malfunctioned satellites from low earth orbite [C]// Proceeding of the i-SAIRAS. Sapporo: JAXA, 2010: 244-251.
|
|
|
| [3] |
REED J, BUSQUETS J, WHITE C. Grappling system for capturing heavy space debris [C]// 2nd European Workshop on Active Debris Removal. Paris: Centre National d’Etudes Spatiales, 2012.
|
|
|
| [4] |
JANI J M, LEARY M, SUBIC A, et al A review of shape memory alloy research, applications and opportunities[J]. Materials and Design, 2014, 56: 1078- 1113
doi: 10.1016/j.matdes.2013.11.084
|
|
|
| [5] |
HAINES C S, LIMA M D, LI N, et al Artificial muscles from fishing line and sewing thread[J]. Science, 2014, 343: 868- 872
doi: 10.1126/science.1246906
|
|
|
| [6] |
SHAHINPOOR M, BAR-COHEN Y, SIMPSON J, et al Ionic polymer-metal composites (IPMCS) as biomimetic sensors, actuators and artificial muscles-a review[J]. Smart Mater Structures, 1998, 7: 15- 30
doi: 10.1088/0964-1726/7/6/001
|
|
|
| [7] |
DUDUTA M, WOOD R J, CLARKE D R Multilayer dielectric elastomers for fast, programmable actuation without prestretch[J]. Advanced Materials, 2016, 28: 8058- 8063
doi: 10.1002/adma.201601842
|
|
|
| [8] |
PALLEAU E, MORALES D, DICKEY M D, et al Reversible patterning and actuation of hydrogels by electrically assisted ionoprinting[J]. Nature Communications, 2013, 4: 22571- 22577
|
|
|
| [9] |
IONOV L Hydrogel-based actuators: possibilities and limitations[J]. Materials Today, 2014, 17: 494- 503
doi: 10.1016/j.mattod.2014.07.002
|
|
|
| [10] |
MIRIYEV A, STACK K, LIPSON H Soft material for soft actuators[J]. Nature Communications, 2017, 8: 5961- 5968
|
|
|
| [11] |
SANAN S, LYNN P S, GRIFFITH S T Pneumatic torsional actuators for inflatable robots[J]. Journal of Mechanisms and Robotics, 2014, 6: 031003
doi: 10.1115/1.4026629
|
|
|
| [12] |
YANG D, VERMA M S, SO J H, et al Buckling pneumatic linear actuators inspired by muscle[J]. Advance Materials Technologies, 2016, 1: 1600055
doi: 10.1002/admt.201600055
|
|
|
| [13] |
EDWIN A P, DARREN J H, RICHARD J M J Origami-inspired active structures: a synthesis and review[J]. Smart Materials and Structures, 2014, 23 (9): 094001
doi: 10.1088/0964-1726/23/9/094001
|
|
|
| [14] |
JESSE L S, ARTHUR A E, LAUREN M, et al Using origami design principles to fold reprogrammable mechanical metamaterials[J]. Science, 2014, 345 (6197): 647
doi: 10.1126/science.1252876
|
|
|
| [15] |
HONG Y, YAO W, XU Y, et al Research on the folding patterns and deployment dynamics of inflatable capsule structures[J]. Journal of Aerospace Technology and Management, 2018, 10 (1): 1- 12
|
|
|
| [16] |
徐彦, 关富玲 可展开薄膜结构折叠方式和展开过程研究[J]. 工程力学, 2008, 25 (5): 176- 181
XU Yan, GUAN Fu-lin Fold methods and deployment analysis of deployable membrane structure[J]. Engineering Mechanics, 2008, 25 (5): 176- 181
|
|
|
| [17] |
SCHENK M, VIQUERAT A D, SEFFEN K A, et al Review of inflatable booms for deployable space structures: packing and rigidization[J]. Journal of Spacecraft and Rockets, 2014, 51 (3): 762- 778
doi: 10.2514/1.A32598
|
|
|
| [18] |
CHEN Y, FENG J Folding of a type of deployable origami structures[J]. International Journal of Structural Stability and Dynamics, 2012, 12 (6): 1250054
doi: 10.1142/S021945541250054X
|
|
|
| [19] |
CHEN Y, FENG J, SUN Q Lower-order symmetric mechanism modes and bifurcation behavior of deployable bar structures with cyclic symmetry[J]. International Journal of Solids and Structures, 2018, 139/140: 1- 14
doi: 10.1016/j.ijsolstr.2017.05.008
|
|
|
| [20] |
CHEN Y, SAREH P, YAN J, et al An integrated geometric-graph-theoretic approach to representing origami structures and their corresponding truss frameworks[J]. Journal of Mechanical Design: Transactions of the ASME, 2019, 141 (9): 091402
doi: 10.1115/1.4042791
|
|
|
| [21] |
CHEN Z, LIANG X, WU T, et al Pneumatically actuated soft robotic arm for adaptable grasping[J]. Acta Mechanica Solida Sinica, 2018, 31 (5): 608- 622
doi: 10.1007/s10338-018-0052-4
|
|
|
| [22] |
YASUTAKA N, MEGUMI U, HISAE T, et al Development of a pneumatic soft actuator with pleated inflatable structures[J]. Advanced Robotics, 2017, 31 (14): 753- 762
doi: 10.1080/01691864.2017.1345323
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|