


水果、蔬菜在人们日常消费中占很大比例,其种植面积逐年增加,单靠人力采摘已无法满足人们的消费需求,亟须实现自动化采摘。在自动化采摘中,采摘机械手是农业采摘机器人的重要组成部分[1-2]。但是,传统的刚性采摘机械手具有体积大、交互性弱、环境适应性差及对果蔬损伤大等缺点[3-4],导致其在农业采摘中的应用受到限制。近年来,随着柔性制造技术的发展,由柔性材料制成的软体机械手脱颖而出,受到了国内外研究人员和机构的广泛关注[5-9]。软体机械手灵活性高,柔顺性强,人机交互安全性高[10],且在复杂的采摘环境中能完成多姿态转换[11-13],可实现对水果、蔬菜的无损采摘[14-15],故其在果蔬采摘方面的发展潜力巨大[16]。近年来,国内外学者对软体机械手的研究取得了很大的进展。日本京都大学的Kondo等[17]研制了一种末端执行器,其一次可收获单个番茄果实或一个番茄簇。美国罗德岛大学的Galloway等[18]研发了一种软体机械手,可实现对水下底栖动物的无损采样。Wang等[19]采用 3D 打印技术制作了三指软体机械手,可实现对柔软食物的抓取。东北林业大学的李健等[20]研制了一种面向草莓抓取的气动四叶片软体抓手,其以草莓的外部轮廓曲线为设计原理并采用气压驱动,抓取成功率达90%。北华大学的赵云伟等[21]研制了一种气动柔性果蔬采摘机械手,可实现对球形和圆柱形果蔬的自动化采摘。南京林业大学的华超等[22]研制了一种软体水果采摘机械手,可实现对苹果、西红柿等的无损稳定抓取。
沙果又名花红,其性平,味甘酸,富含多种维生素、微量元素以及人体所需的蛋白质、脂肪、碳水化合物等,具有祛风湿、止咳平喘的功效,深受广大消费者的喜爱[23]。但是,目前沙果采摘仍未实现自动化,造成了人力资源的浪费。基于此,笔者拟设计一种面向沙果采摘的气动软体采摘机械手。首先,通过构建计算模型来确定采摘机械手软体手指的弯曲角度。然后,通过比较不同型号硅胶浇注的软体手指的软硬度来确定其材料;同时,通过ABAQUS软件对不同结构的软体手指进行有限元仿真分析,以确定较优的结构。接着,通过开展单根软体手指的充气弯曲实验、末端输出力测定实验以及三指抓取实验,以验证有限元仿真结果的准确性以及软体手指结构的合理性。最后,制作气动软体采摘机械手,并用其分别对沙果及其他水果进行采摘实验,以验证所设计采摘机械手对沙果采摘的可行性以及对其他相似水果采摘的通用性。
1 气动软体采摘机械手总体结构设计
图1

图2
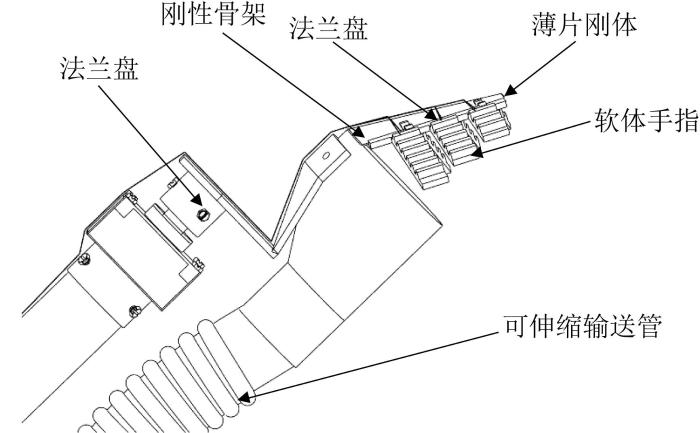
图2
气动软体采摘机械手结构示意
Fig.2
Structure diagram of pneumatic soft picking manipulator
由于沙果的采摘环境较为复杂,沙果树的枝桠会阻挡采摘机械手的运动,故将其形状设计为上小下大并通过法兰盘与机械臂连接,以便运动。所设计采摘机械手的软体手指与刚性骨架通过法兰盘连接在一起且均可拆卸,当软体手指破损时,可及时更换,既避免了资源浪费,又节省了制造时间;刚性骨架通过铆钉与薄片刚体相连。在采摘时,首先,利用气压驱动6根软体手指包裹住沙果,防止沙果掉落以及保护沙果;然后,利用机械臂带动采摘机械手向上运动,由刚性骨架前端的刀具切断果梗,完成采摘;最后,由安装在薄片刚体下方的可伸缩输送管将采摘的沙果输送到集装箱内,以节省采摘时间。
2 软体手指弯曲角度确定
软体手指弯曲角度是决定气动软体采摘机械手能否完成采摘的重要因素之一。若弯曲角度小,则软体手指无法完全包裹住沙果,将无法完成采摘。为此,选取市面上常见的龙丰果(沙果品种之一)作为实验对象,用于确定软体手指的最小弯曲角度。
由沙果树的结果形式可知,一串沙果一般有1~6个果实。将龙丰果随机分为4组,每组均包含果实数量为1~6个的成串龙丰果。利用游标卡尺分别测量4组龙丰果的直径,结果如表1所示。
表1 各组龙丰果的直径 (mm)
Table 1
| 组别 | 龙丰果数量/个 | |||||
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | |
| 第1组 | 43.2 | 91.9 | 91.2 | 115.3 | 106.2 | 118.2 |
| 第2组 | 42.0 | 47.8 | 91.1 | 104.3 | 121.6 | 118.9 |
| 第3组 | 41.5 | 47.0 | 93.2 | 107.5 | 86.0 | 124.5 |
| 第4组 | 48.1 | 91.4 | 86.1 | 116.3 | 99.7 | 92.5 |
若要使所设计的气动软体采摘机械手满足对所有沙果果实的采摘要求,则果实的尺寸差应取最大。由表1中的数据可知,对称的2根软体手指在弯曲前的距离应大于最大值
为了确定单根软体手指在满足采摘要求时需要达到的弯曲角度,建立如图3所示的弯曲角度计算模型。图中:
图3
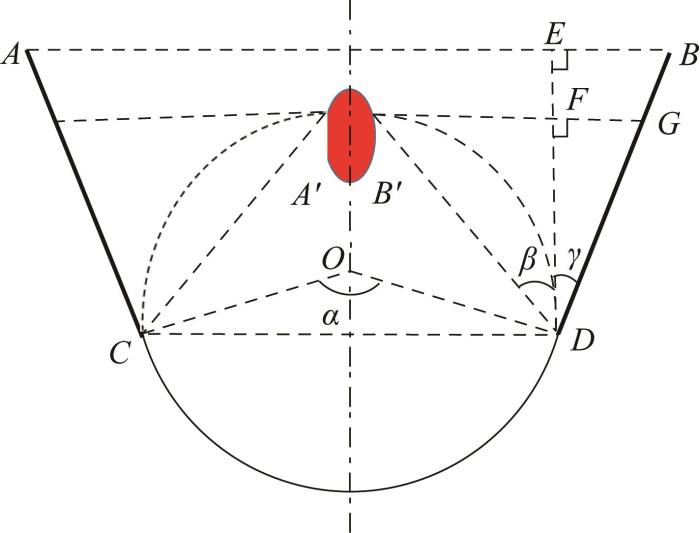
基于图3可得,软体手指的弯曲角度θ为:
其中:
式中:L为各线段的长度;γ、β分别为弯曲前、后软体手指BD、
将各参数的值代入式(1),可得θ=45.91º。由此可知,当软体手指的弯曲角度大于45.91°时,气动软体采摘机械手才能满足对沙果的采摘要求。
3 软体手指材料与结构确定
为确定软体手指的材料,通过万能拉力试验机获取HY-E610、HY-E620、HY-E630这3种型号硅胶的应力—应变曲线,并基于这3种硅胶的性能参数对结构相同的软体手指进行ABAQUS有限元仿真分析,同时利用相同模具浇注的软体手指进行充气弯曲实验。为得到合适的软体手指结构,设计了4种不同的结构,并对不同结构软体手指的弯曲性能进行ABAQUS有限元仿真分析。
3.1 软体手指材料确定
Yeoh模型采用内部应变能来表征硅胶材料的力学性质,主要是描述硅胶在拉伸形变时内部储存的弹性势能。一般情况下,能量密度函数W可用变形张量的3个不变量
其中:
式中:
由硅胶的不可压缩性可知:
在采用Yeoh模型表征硅胶材料的特征时,其应变能量密度函数可表示为:
式中:
对于硅胶,通常采用二项参数形式的应变能量密度函数,即:
对
待定系数
联立
适合抓取的软体手指既需要有足够的硬度以保持稳定,又需要在充气时容易弯曲变形。选用深圳市红叶杰科技有限公司生产的型号为HY-E610、HY-E620、HY-E630的3种硅胶作为软体手指的备选材料(型号的末尾两位表示硅胶度数,每种型号的硅胶均由该型号的A、B两组硅胶1∶1混合而成)。为了得到这3种硅胶的性能参数,利用万能拉力试验机开展单轴拉伸实验,以得到其应力—应变拟合曲线,结果如图4所示。
图4
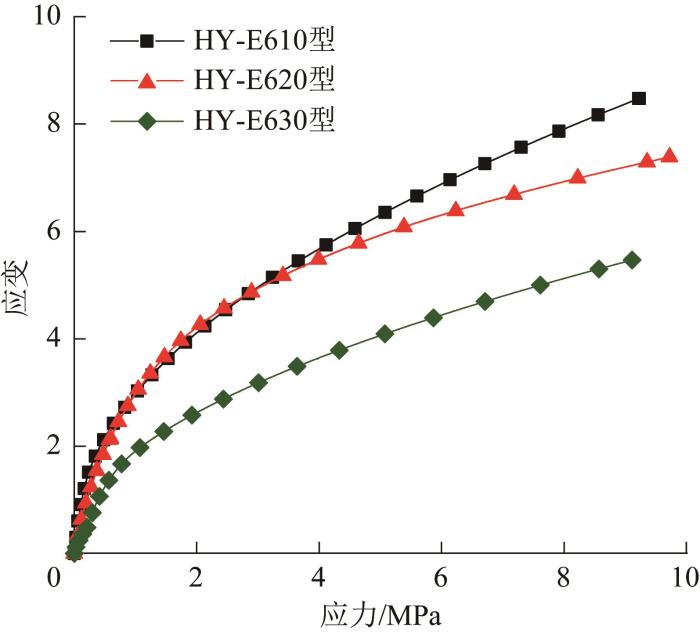
图4
3种硅胶的应力—应变拟合曲线
Fig.4
Stress‒strain fitting curves of three kinds of silicone
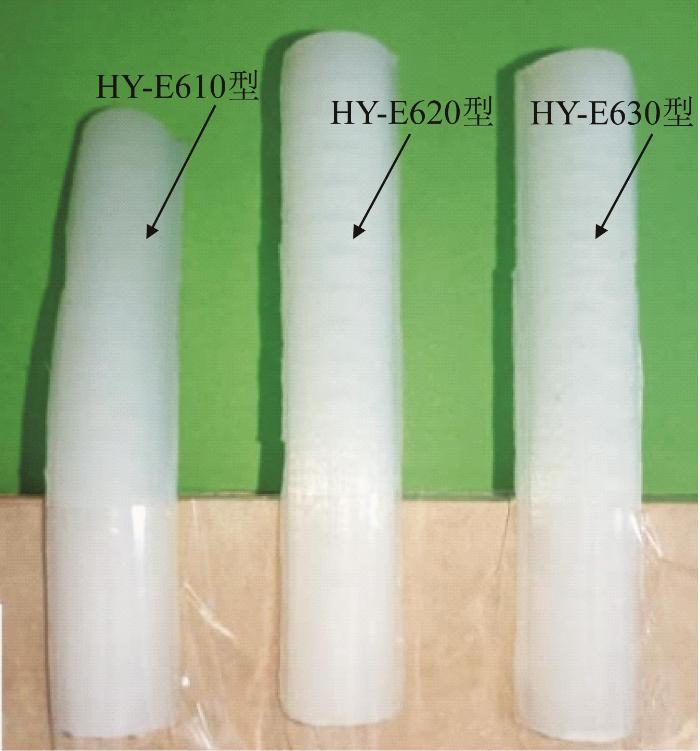
为了选择合适的硅胶,分别将上述3种硅胶的应力—应变数据导入ABAQUS软件并进行仿真分析。同时,基于3D打印技术,分别用3种硅胶浇注软体手指(见图5)并开展充气弯曲实验。通过分析发现,随着硅胶度数的增大,软体手指的硬度越大,充气加压时越不容易弯曲。对于HY-E610型硅胶软体手指,虽然其在充气加压时弯曲变形大,但硬度不够,且在未充气时就已经弯曲变形。对于HY-E630型硅胶软体手指,其硬度较大,但充气加压时弯曲变形较小。由此可知,采用这2种型号的硅胶作为软体手指的材料显然不合理。而HY-E620型硅胶软体手指的硬度适中,且充气加压时具有较大的弯曲变形,符合气动软体采摘机械手的性能要求,故本文选择该型号硅胶作为软体手指的原材料。
图5
3.2 软体手指结构确定
为了研究结构对软体手指弯曲性能的影响,设计了4种不同的结构;为了研究气道大小和形状对软体手指弯曲性能的影响,基于选定的结构,分别设计了3种气道大小和形状(其余结构尺寸均相同)。
3.2.1 结构对弯曲性能的影响
表2 4种软体手指的应变层结构参数 (mm)
Table 2
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| 3 | 3 | ||
| 3 | 9 | ||
| 113 | 12 | ||
| 17 | 18 | ||
| r11 | 3 | 3 | |
| r12 | 6 | 6 | |
| r13 | 9 | 113 | |
| 3 | 11 | ||
| 3 | r31 | 6 | |
| 6 | r32 | 9 | |
| 12 | 3 | ||
| 18 | 9 | ||
| 3 | 113 | ||
| 6 | 11 | ||
| 9 | r41 | 3 | |
| 113 | r42 | 6 | |
| 17 | r43 | 9 |
图6
图6
4种软体手指的应变层结构示意
Fig.6
Schematic diagram of strain layer structure of four kinds of soft fingers
在相同条件下,利用ABAQUS软件对不同驱动气压下4种软体手指的弯曲性能进行有限元仿真分析,结果如图7所示。需要注意的是,当驱动气压小于0.05 MPa时,软体手指的弯曲变形量很小,为了减少运算量,仅选取0.025 MPa进行分析。从图7中可以看出,当驱动气压为0.025~0.06 MPa时,第1种和第2种软体手指的弯曲变形量基本相同;当驱动气压为0.06~0.09 MPa时,第2种比第1种的弯曲变形量大;当驱动气压为0.10 MPa时,第2种的弯曲变形量与驱动气压为0.09 MPa时的相差不大,而第1种的弯曲变形量比驱动气压为0.09 MPa时的大很多。此外,第2种结构的棱角较多,而棱角处易产生应力集中,这会对软体手指的弯曲性能造成影响。相较而言,第1种结构比第2种更合适。对于第3种结构,虽然弯曲变形量大,但较软,不适合作采摘机械手指。对于第4种结构,当驱动气压为0.025~0.06 MPa时,其弯曲变形量比其他3种结构大,但当驱动气压大于0.06 MPa后,其弯曲变形量随驱动气压增大的变化不大。综上所述,采用第1种结构制作软体手指最合适。
图7
图7
结构对软体手指弯曲性能的影响
Fig.7
Influence of structure on bending performance of soft finger
3.2.2 气道大小对弯曲性能的影响
为了研究气道大小对软体手指弯曲性能的影响,基于图6(a)所示结构,设计了3种不同尺寸的半圆形气道,半径分别为4,6,8 mm。利用ABAQUS软件对气道大小不同的3种软体手指的弯曲性能进行有限元仿真分析,结果如图8所示。从图8中可以看出,当驱动气压为0.025~0.05 MPa时,3种软体手指的弯曲变形量几乎相同。当驱动气压为0.05~0.07 MPa时,半圆形气道半径为4 mm的软体手指的弯曲变形量随驱动气压增大的变化不大;半圆形气道半径为6,8 mm的弯曲变形量相差不大,但均比半圆形气道半径为4 mm的大。当驱动气压为0.07~0.09 MPa时,半圆形气道半径为8 mm的软体手指的弯曲变形量大于其他2种,半圆形气道半径为4 mm的弯曲变形量随驱动气压的增大先突变后逐渐上升;半圆形气道半径为8 mm的弯曲变形量随驱动气压的增大稳定上升。由于弯曲变形突变会缩短软体手指的使用寿命,且气道半径较大会造成限制层与应变层的粘连面积小,而粘连不好易漏气。综合考虑,选用半径为6 mm的半圆形气道的软体手指较合适。
图8
图8
气道大小对软体手指弯曲性能的影响
Fig.8
Influence of airway size on bending performance of soft finger
3.2.3 气道形状对弯曲性能的影响
为了研究气道形状对软体手指弯曲性能的影响,设计了3种不同形状的气道(气道面积不变),分别为半径为6 mm的半圆形气道,边长为3.76 mm的正方形气道和长度为5.65 mm、宽度为2.50 mm的长方形气道。利用ABAQUS软件分别对气道形状不同的3种软体手指的弯曲性能进行有限元仿真分析,结果如图9所示。从图9中可以看出,当驱动气压为0.025~0.09 MPa时,采用半圆形气道的软体手指的弯曲变形量随驱动气压的增大而平缓增大,变形较为均匀;采用正方形和长方形气道的软体手指在0.025~0.06 MPa驱动气压下的弯曲变形量比采用半圆形气道的小,但在驱动气压为0.06~0.07 MPa时发生了突变(瞬间增大);当驱动气压为0.09~0.10 MPa时,气道形状不同的3种软体手指的弯曲变形量几乎相同且均发生了突变,发生突变的原因是应力较为集中。弯曲变形突变会缩短软体手指的使用寿命,且突变时会产生较大的力,可能会导致抓取物脱离。综合考虑,选用半径为6 mm的半圆形气道的软体手指较为合适。
图9
图9
气道形状对软体手指弯曲性能的影响
Fig.9
Influence of airway shape on bending performance of soft finger
4 气动软体采摘机械手实验研究
首先,为验证软体手指的弯曲角度是否满足要求,基于利用3D打印技术打印的模具浇注软体手指并开展充气弯曲实验,测量其在不同驱动气压下的弯曲角度,并与ABAQUS仿真结果进行对比分析,以验证仿真结果的准确性。然后,利用推拉力计测量不同驱动气压下软体手指末端的输出力,同时利用3根软体手指对不同水果进行抓取实验,以验证软体手指结构的合理性。最后,制作气动软体采摘机械手,对沙果以及其他相似水果进行采摘实验,以验证采摘机械手的通用性。
4.1 软体手指制备
由于软体手指结构较为复杂,很难采用机加工方法制作。为此,国内外学者开展了大量研究。目前,常用于软体手指加工的方法包括软体平板印刷法、形状沉积制造技术、失蜡铸造法和复合材料3D打印技术等。相较而言,对于复杂结构的制造加工,软体平板印刷法最为简单。因此,本文选用软体平板印刷法来制作软体手指,具体步骤如下。
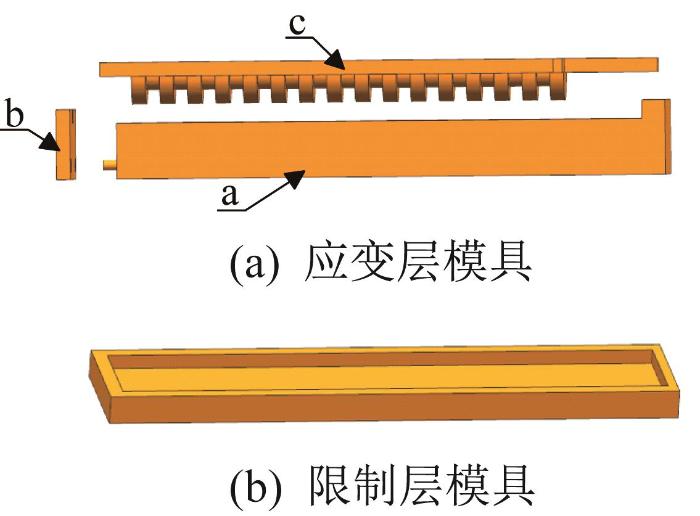
1)模具设计和打印。先利用UG软件设计软体手指模具,再利用3D打印技术打印模具。模具分为限制层和应变层两个部分。为方便脱模,将应变层模具设计成a、b、c三个小部分,如图10所示。
图10
2)硅胶选用与准备。选用深圳市红叶杰科技有限公司生产的HY-E620型硅胶,将A、B两组硅胶按1∶1比例混合,用木棒搅拌均匀,并确保不与金属物质接触,然后用真空泵抽取搅拌过程中产生的气泡。
3)硅胶浇注。在限制层模具底部放入与底面大小相同的尼龙纱网,然后将搅拌均匀的硅胶倒入模具,并将其放在温度为30°左右的环境中静置。
4)脱模与软体手指制作。静置6 h后,将应变层和限制层硅胶从模具中取出,并采用同比例硅胶将两部分粘合在一起,静置等待完全凝固,即可得到软体手指实体。
4.2 软体手指充气弯曲实验
图11
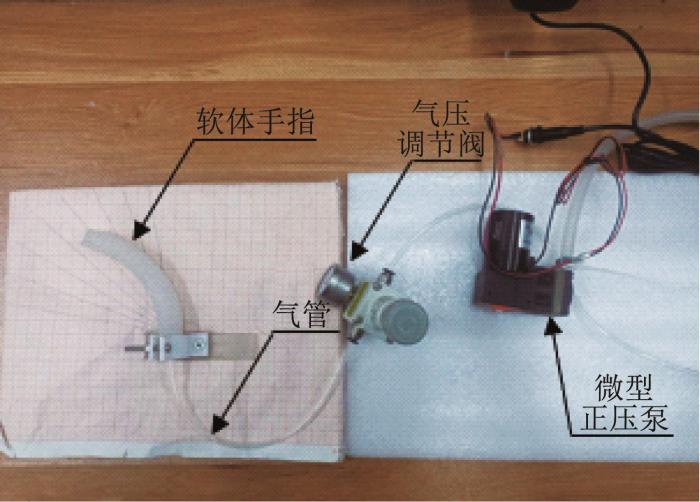
表3 软体手指弯曲角度测量结果 (°)
Table 3
| 实验序号 | 驱动气压/MPa | |||||
|---|---|---|---|---|---|---|
| 0.025 | 0.05 | 0.06 | 0.07 | 0.08 | 0.09 | |
| 平均值 | 8.7 | 19.3 | 41.7 | 60.0 | 68.7 | 78.3 |
| 第1次 | 8 | 20 | 39 | 58 | 66 | 78 |
| 第2次 | 8 | 18 | 45 | 63 | 71 | 79 |
| 第3次 | 10 | 20 | 41 | 59 | 69 | 78 |
利用ABAQUS软件对不同驱动气压下软体手指的弯曲形态进行有限元仿真分析,结果如图12所示。鉴于软体手指末端采用完全铰链固定,利用“末端端点+指尖”来测量弯曲角度是相对准确的(所测角度θ′减去90°后为软体手指的弯曲角度θ)。利用ABAQUS软件中的三点测量角度功能测得驱动气压为0.025,0.05,0.06,0.07,0.08,0.09 MPa时软体手指的弯曲角度,分别为θ1=14.71°,θ2=29.56°,θ3=50.58°,θ4=69.97°,θ5=83.90°,θ6=105.38°。
图12
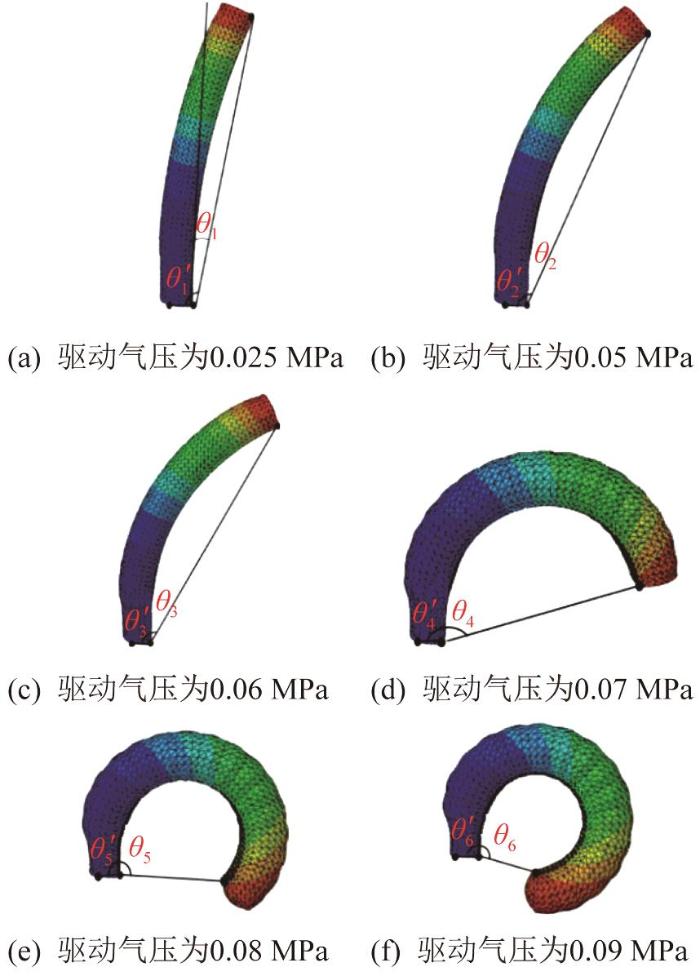
图13所示为不同驱动气压下软体手指弯曲角度的仿真与实验结果对比。由图可知,仿真结果与实验结果的变化趋势相同,验证了仿真结果的准确性,但具体的弯曲角度值存在一定差异,原因有以下2点:
图13
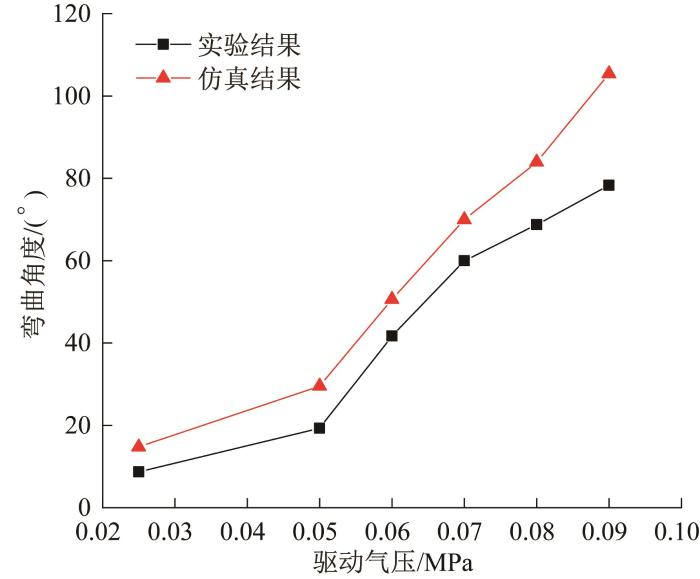
图13
软体手指弯曲角度仿真与实验结果对比
Fig.13
Comparison between simulation and experiment results of bending angle of soft finger
1)实验获得的硅胶性能参数与真实的硅胶性能参数存在差异;
2)利用3D打印技术打印的模具表面不光滑,导致浇注的软体手指表面也不光滑,产生了应力集中。
4.3 软体手指末端输出力测定实验
图14
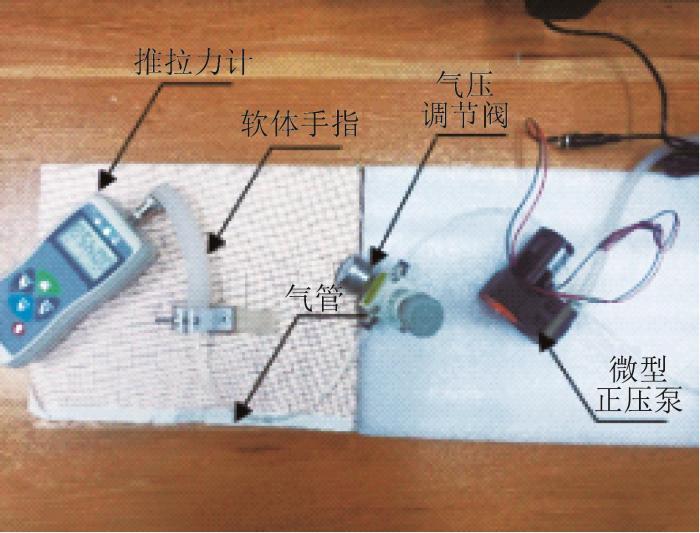
表4 软体手指末端输出力测量结果 (N)
Table 4
驱动 气压 /MPa | 弯曲角度/(°) | ||||||
|---|---|---|---|---|---|---|---|
| 10 | 20 | 30 | 40 | 50 | 60 | 70 | |
| 0.06 | 0.255 | 0.124 | 0.053 | 0 | 0 | 0 | 0 |
| 0.07 | 0.723 | 0.401 | 0.032 | 0.175 | 0.028 | 0 | 0 |
| 0.08 | 0.988 | 0.749 | 0.409 | 0.367 | 0.188 | 0.054 | 0 |
由表4可知,在驱动气压相等的情况下,随着弯曲变形量的增大,软体手指末端的输出力逐渐减小。当弯曲变形量相等时,随着驱动气压的增大,软体手指末端的输出力逐渐增大。
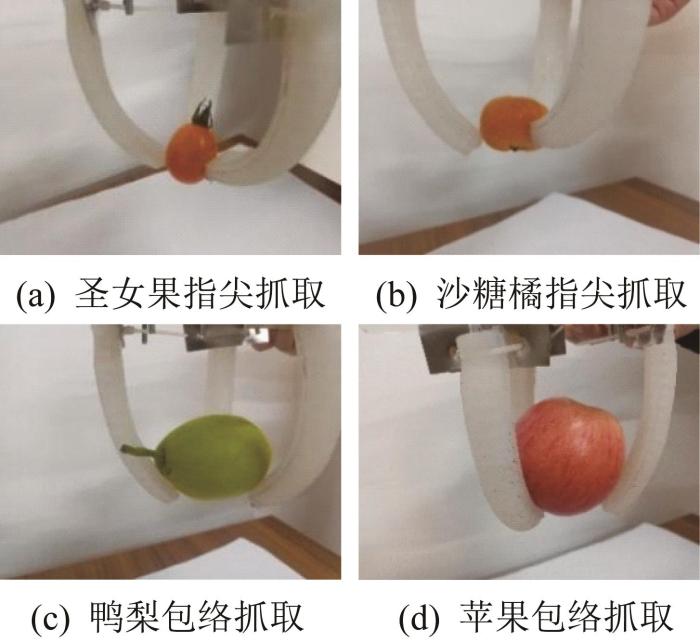
4.4 三指抓取实验
表5 抓取对象质量
Table 5
| 抓取对象 | 质量/g |
|---|---|
| 圣女果 | 25 |
| 沙糖橘 | 30 |
| 鸭梨 | 120 |
| 猕猴桃 | 145 |
| 橘子 | 115 |
| 苹果 | 190 |
图15
4.5 气动软体采摘机械手采摘实验
图16
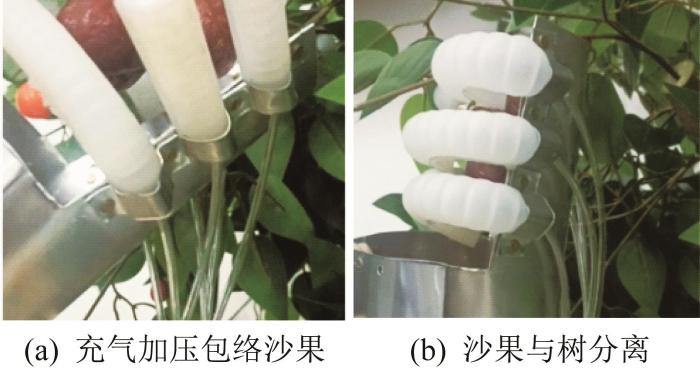
图16
气动软体采摘机械手采摘沙果实验现场
Fig.16
Experimental site of crabapple picking with pneumatic soft picking manipulator
表6 沙果采摘成功次数
Table 6
| 沙果数量/个 | 驱动气压/MPa | ||
|---|---|---|---|
| 0.06 | 0.07 | 0.08 | |
| 1 | 0 | 4 | 3 |
| 2 | 0 | 5 | 6 |
| 3 | 4 | 8 | 8 |
| 4 | 5 | 9 | 8 |
| 5 | 8 | 7 | 9 |
| 6 | 8 | 8 | 7 |
从采摘结果可以看出,气动软体采摘机械手在采摘含3个及以上果实的成串沙果时,驱动气压为0.08 MPa时的采摘成功率达到80%,验证了该采摘机械手的可行性。造成对含单个及2个果实的成串沙果采摘成功率不高的原因是:该采摘机械手的整体结构较大,软体手指较长,无法很好地包裹住沙果,从而影响采摘成功率。
图17

图17
气动软体采摘机械手采摘其他水果实验现场
Fig.17
Experimental site of other fruits picking with pneumatic soft picking manipulator
表7 不同水果的采摘成功次数
Table 7
| 水果种类 | 驱动气压/MPa | ||
|---|---|---|---|
| 0.06 | 0.07 | 0.08 | |
| 橘子 | 9 | 8 | 9 |
| 苹果 | 10 | 9 | 8 |
| 桃 | 8 | 9 | 9 |
| 梨 | 9 | 9 | 10 |
5 结 论
本文设计并制作了一种面向沙果采摘的刚柔耦合气动软体采摘机械手。通过理论计算、仿真分析及实验研究,确定了软体手指的弯曲角度、材料、结构以及内部气道的大小和形状;通过充气弯曲实验、末端输出力测定实验和三指抓取实验,验证了仿真结果的准确性以及软体手指结构的合理性;利用试制的六指包裹式气动软体采摘机械手对沙果、苹果、梨、橘子等进行了采摘实验。结果表明:该采摘机械手不仅对含3个及以上果实的成串沙果的采摘成功率达到80%,还可实现对其他类球形水果的采摘。研究结果为水果采摘机械手的设计与研究提供了新思路。
但是,所设计的采摘机械手对含单个及2个果实的成串沙果的采摘成功率并不高,这主要是因为沙果尺寸小,而采摘机械手结构尺寸偏大。后续可通过减小刚性骨架的尺寸及软体手指的长度来调整其整体尺寸,以优化结构,提高采摘成功率。
参考文献
Field test of an autonomous cucumber picking robot
[J].
Development of a three degrees of freedom robot for harvesting lettuce using machine vision and fuzzy logic control
[J].
Soft robotics: a bioinspired evolution in robotics
[J].
软体机器人研究现状综述
[J].
Review of soft-bodied robots
[J].DOI:10.3901/jme.2012.03.025 [本文引用: 1]
Design, fabrication and control of soft robots
[J].
Deformation in soft-matter robotics: a categorization and quantitative characterization
[J].
A review article: investigations on soft materials for soft robot manipulations
[J].
Soft manipulators and grippers: a review
[J].
Flexible and soft robotic grippers: the key to new markets?
[J].
基于多腔软体驱动器的柔性手指设计
[J].
Flexible finger design based on multi-cavity soft actuator
[J].DOI:10.3785/j.issn.1006-754X.2020.00.057 [本文引用: 1]
Dynamics and trajectory optimization for a soft spatial fluidic elastomer manipulator
[J].
Adaptive robust control of soft bending actuators: an empirical nonlinear model-based approach
[J].
柔性气动机械手的设计与控制系统研究
[D].
Research on design and control system of a flexible pneumatic manipulator
[D].
软体机器人:结构、驱动、传感与控制
[J].
Soft robots: structure, actuation, sensing and control
[J].DOI:10.3901/jme.2017.13.001 [本文引用: 1]
软体机械手爪在果蔬采摘中的应用研究进展
[J].
Research progress on application of soft robotic gripper in fruit and vegetable picking
[J].DOI:10.11975/j.issn.1002-6819.2018.09.002 [本文引用: 1]
水果采摘机器人末端执行器的研究进展
[J].
Research progress in fruit picking robot end effectors
[J].DOI:10.3969/j.issn.2095-2953.2020.09.001 [本文引用: 1]
Development of an end effector for a tomato cluster harvesting robot
[J].
Soft robotic grippers for biological sampling on deep reefs
[J].
Soft gripper dynamics using a line-segment model with an optimization-based parameter identification method
[J].
面向草莓抓取的气动四叶片软体抓手研制
[J].
Development of pneumatic four blade soft grasp for grabbing strawberry
[J].DOI:10.11918/202103107 [本文引用: 1]
气动柔性果蔬采摘机械手运动学分析与实验
[J].
Kinematics analysis and experiment on pneumatic flexible fruit and vegetable picking manipulator
[J].DOI:10.6041/j.issn.1000-1298.2019.08.004 [本文引用: 1]
软体水果采摘机械手系统设计分析与试验
[J].
Design, analysis and experimental of soft picking manipulator system for fruit harvesting
[J].
北方沙果栽培技术
[J].
Cultivation technology of northern sand fruit
[J].DOI:10.3969/j.issn.1005-2690.2018.02.058 [本文引用: 1]
More hyperelastic models for rubber-like materials: consistent tangent operators and comparative study
[J].
橡胶材料超弹性本构模型选取及参数确定概述
[J].
Overview of selection and parameter determination for hyperelastic constitutive model of rubber material
[J].DOI:10.3969/j.issn.2095-5448.2018.05.001 [本文引用: 1]
气动软体机械手抓取性能研究
[D].
Research on grasping performance of pneumatic soft gripper
[D].DOI:10.33737/gpps19-bj-117 [本文引用: 1]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}