

随着人们对汽车安全需求的不断提升,越来越多的主动安全控制系统被应用于汽车[1-3],质心侧偏角是稳定性控制系统的关键参数,能够及时准确地获取该参数对于汽车安全驾驶的意义重大. 由于成本原因,商用车上很少通过如光学传感器、GNSS/INS组合导航等检测装置直接获取质心侧偏角,而是采用软测量技术及状态观测的方式获取质心侧偏角[4]. 质心侧偏角观测器的构建方式主要分为3种:1)基于运动学、2)基于动力学和3)基于运动几何. 方式1)将传感器量测量(横摆角速度、侧向加速度、纵向速度)与质心侧偏角速度的微分关系式进行积分或者利用卡尔曼滤波算法得到质心侧偏角[5]. 方式1)对车辆参数的不确定性、路面附着条件以及驾驶操纵输入频率的变化具有鲁棒性,但对传感器的测量精度要求很高,对环境噪声、传感器偏置以及标定误差比较敏感[6]. 反馈补偿可以消除该方式中由传感器漂移、标定误差引起的量测信号偏差[7]. 方式2)是基于车辆动力学模型和轮胎模型进行观测器的构建,弊端在于估计结果的优劣依赖于观测模型以及模型参数(车辆参数、路面附着系数、过程噪声与量测噪声协方差矩阵等)的准确性. 为了简化估计模型,建模时将如侧向风引起的横摆力矩与侧向力的因素忽略,由此导致估计结果的偏差[8-9]. Zhang等[10]提出自适应扩展卡尔曼滤波器,并将其用于克服过程噪声与环境噪声统计特性的不确定性对于估计精度的不利影响. 为了更好地逼近非线性轮胎模型,提高观测器构建精度,Zhang等[11]提出切换T-S模糊观测器,估计车辆质心侧偏角. 上述观测方法在一定程度上改善了方式2)的估计效果,但该方式的估计精度严重依赖于影响估计算法实时性的观测模型及参数的精确性. 方式3)利用前、后轮侧偏角与质心侧偏角之间的运动几何关系进行质心侧偏角的估计[12],特点是模型简单、计算量小、无积分操作,对于量测噪声、传感器偏置和部分车辆参数的不确定性具有一定的鲁棒性[13]. 方式3)所用运动几何关系式中的轮胎侧偏刚度取为定值,当轮胎侧向力处于线性阶段时,估计效果较好;当轮胎侧向力处于非线性阶段时,估计结果偏差较大[14]. You等[15]采用轮胎侧偏刚度辨识方法来适应轮胎侧偏刚度的非线性变化,该方法依赖路面附着系数的精确获取.
单一的估计方式都存在不足,因此学者们开始尝试采用多方法融合估计方式. Nishio等[16]将路面附着系数作为判断条件,以实现运动学与动力学估计方式的逻辑切换. 相比动力学方式,运动几何方式结构更简单,计算量更小,对环境噪声、传感器偏置具有很好的鲁棒性[17]. 高博麟等[18]为运动学、动力学与运动几何方式分别设计子滤波器,使用主滤波器对子滤波器结果进行信息融合,得到全局融合结果. 该方法所用的动力学子滤波器对轮胎模型进行简化,同时运动学子滤波器未考虑量测噪声统计特性的不确定性. Li等[5]以动态特性的强弱为融合指标,对运动几何方式与运动学方式的估计结果进行择优融合;为了克服质心侧偏角的估计精度对于轮胎侧偏刚度精确性的依赖,利用PI控制器对轮胎侧偏刚度进行实时反馈调节. 该调整依赖于路面附着系数与轮胎模型的精确获取,Li等[5]还将运动学估计方式的量测噪声统计特性(协方差矩阵R)预先设为定值,这与实际不符.
单一的估计方式向多方法融合估计方式的发展,一定程度上提高了质心侧偏角的估计精度,但融合估计的方式仍然待深入研究:1)尽管有学者利用PI控制器对轮胎侧偏刚度进行了较准确的实时反馈调整,但该运动几何估计方式依赖于轮胎模型及路面附着系数等参数已知. 2)量测噪声受环境影响较大,其统计特性具有不确定性. 在融合估计过程中,量测噪声的统计特性根据先验值预先设为定值,但定值化处理不仅会降低估计精度,甚至会导致滤波发散. 针对上述问题,本研究基于改进的质心侧偏角运动学与运动几何估计方法,设计质心侧偏角融合估计算法.
1. 车辆模型
如图1所示,传统线性二自由度无法描述车辆在非线性状态下的运动学关系,因此采用包含纵向、横摆与横向三自由度的车辆模型来表征车辆不同状态与参数之间的数学关系. 图中,
图 1

整车纵向运动:
整车侧向运动:
整车横摆运动:
为了后续观测器设计,将式(1)~(3)变形得到
前后轮的轮胎侧偏角描述为
考虑到纵向加速度对垂直载荷的影响,将垂直载荷描述为
式中:
式中:
2. 质心侧偏角融合观测器设计
2.1. 质心侧偏角融合观测器整体结构
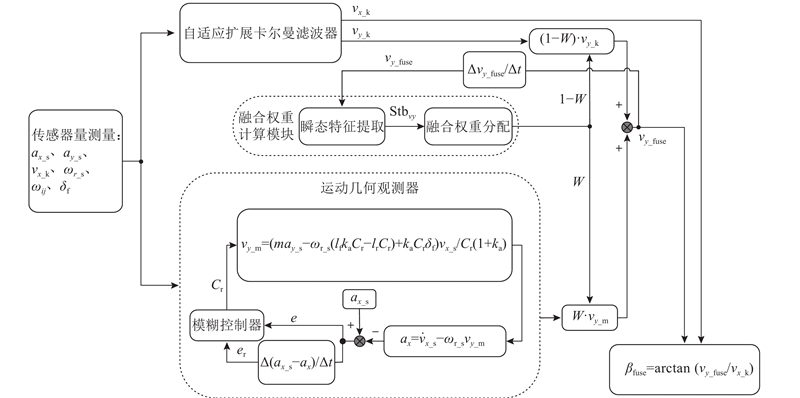
如图2所示,质心侧偏角融合观测器分为4个模块:1)自适应扩展卡尔曼滤波器(adaptive extended Kalman filter, AEKF)、2)运动几何观测器、3)融合权重计算、4)质心侧偏角融合估计值的计算. 模块1)基于车辆纵、侧向速度,横摆角速度与纵、侧向加速度之间的运动学方程;构建具有量测噪声协方差R自适应调整功能的扩展卡尔曼观测器(EKF);实现对车辆纵、侧向速度的估计. 模块2)由侧向车速的代数计算式得到侧向车速估计值vy_m,利用模糊控制器对轮胎侧偏刚度进行实时校正,以提高侧向车速的估计精度. 模块3)基于侧向车速融合结果的变化率
图 2
2.2. 自适应扩展卡尔曼滤波器的设计
化简式(4)、(5)得到车辆运动学方程
定义状态向量为
取采样时间为
其中
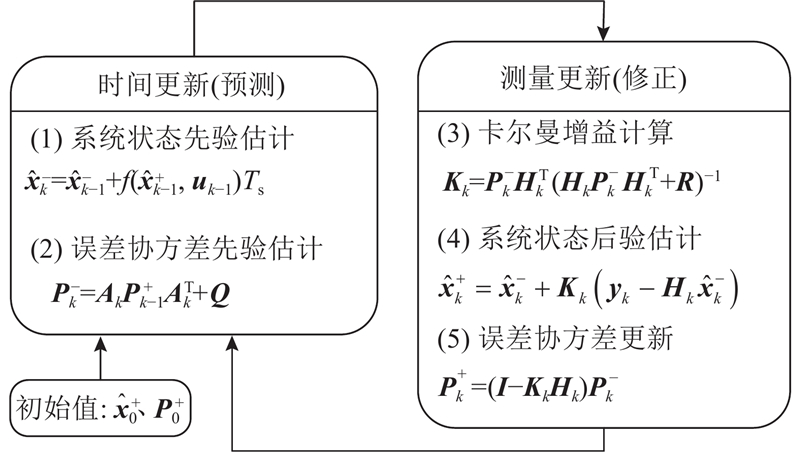
扩展卡尔曼滤波算法分为时间更新和量测更新2个部分,算法流程如图3所示. EKF将量测协方差矩阵R视为定值,但在车辆实际行驶过程中,外界的环境噪声统计特性具有不确定性,将R视为定值会引起估计偏差. 本研究在EKF基础上加入量测协方差矩阵自适应算法,Zhang等[10]指出新息能够很好地反应环境噪声对估计误差的影响,为此,可根据新息变化设计量测协方差矩阵自适应调整算法. 定义新息
图 3
新息的理论协方差矩阵
式中:E为期望值,
式中:M为滑动窗口的长度,取M=50. 依据系统的实际新息协方差与理论协方差的相对大小,实时更新R,调整因子
式中:tr()为矩阵的迹,n为量测向量的维度. 当
2.3. 运动几何观测器设计
假设轮胎侧向力处于线性区域,则前、后轮胎侧向力分别为
由
式中:
如图4所示为带有轮胎侧偏刚度自适应反馈调节的运动几何观测器. 图中,侧向速度估计值
图 4
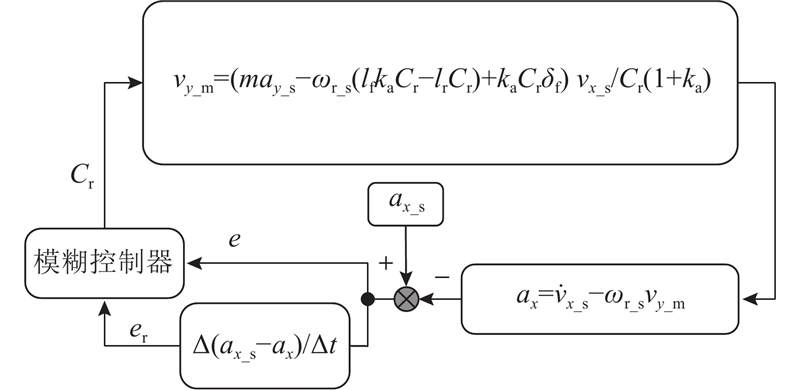
图 5
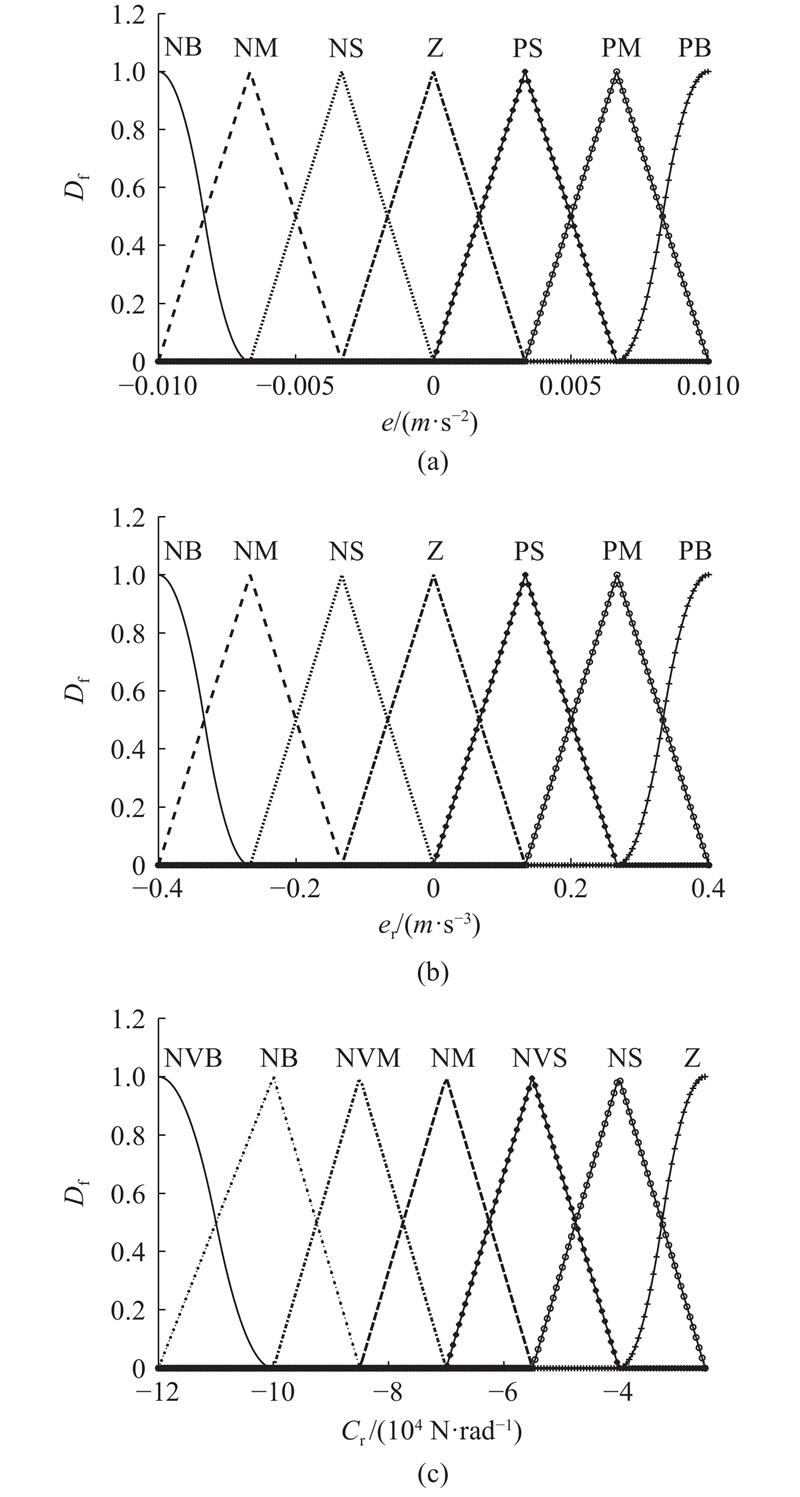
表 1 后轮胎侧偏刚度的模糊规则
Tab.1
| er | e | ||||||
| NB | NM | NS | Z | PS | PM | PB | |
| NB | Z | NS | NVS | NM | NVS | NS | Z |
| NM | NS | NVS | NM | NVM | NM | NVS | NS |
| NS | NVS | NM | NVM | NB | NVM | NM | NVS |
| Z | NM | NVM | NB | NVB | NB | NVM | NM |
| PS | NVS | NM | NVM | NB | NVM | NM | NVS |
| PM | NS | NVS | NM | NVM | NM | NVS | NS |
| PB | Z | NS | NVS | NM | NVS | NS | Z |
2.4. 2种估计方式的对比分析
如图6所示为在
图 6
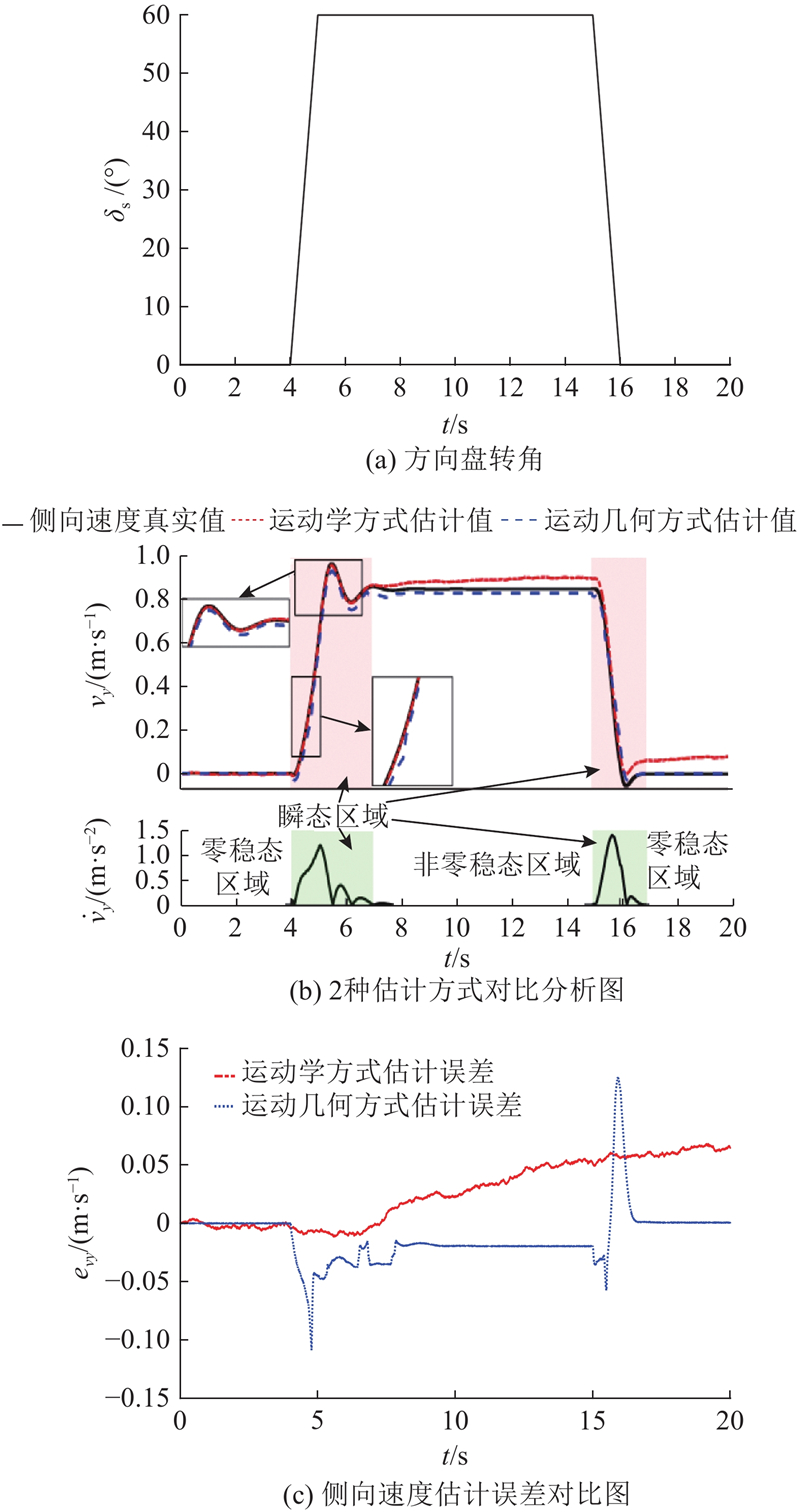
图 6 运动学与运动几何方式的估计结果对比
Fig.6 Comparison of estimation results between kinematic method and kinematic-geometry method
2.5. 融合估计算法设计与验证
2.5.1. 融合估计算法设计
本研究提出以状态量的瞬态特性强弱(用于表征状态量变化率的大小)为融合指标的融合算法,该算法的流程图如图7所示. Cheli等[20]将侧向加速度、横摆角速度和方向盘转角在0~0.1 s的均方根加权之和作为衡量状态量稳态特性强弱的指标,用于融合算法的设计. 借鉴该思想,将侧向速度变化率
图 7
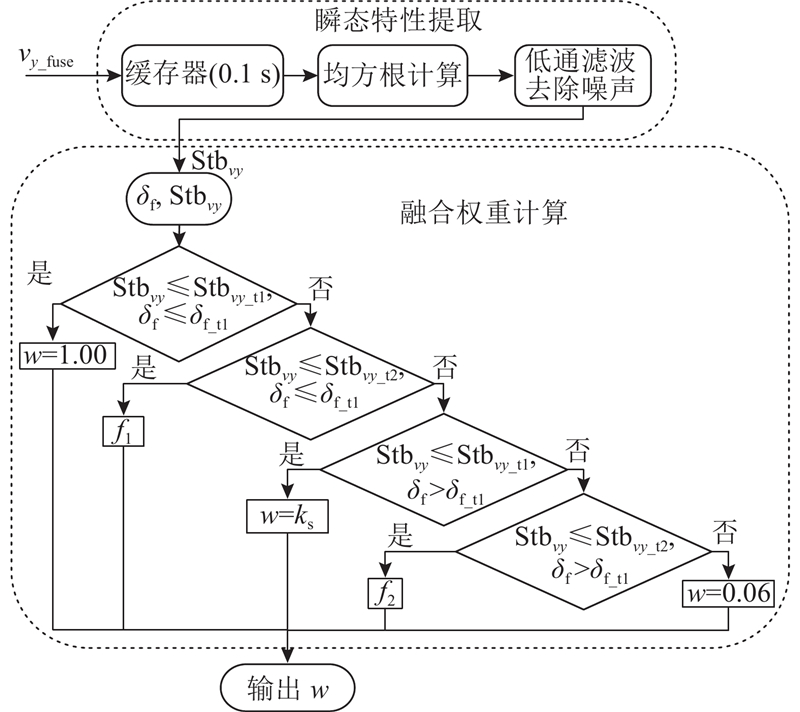
1)当
2.5.2. 融合估计算法验证
阶跃-回正试验进行融合算法的验证,取
图 8

3. 仿真验证
采用Carsim-Simulink的仿真与驾驶员在环(DIL)试验平台,以Carsim输出的值为参考值,验证本研究提出的融合观测器的有效性,整车参数如表2所示. 模拟真实的传感器量测信号,须为Carsim的理想输出添加合适的零均值高斯白噪声,各量测输入所加噪声的方差[21]取值如下:
表 2 Carsim车辆参数
Tab.2
| 参数 | 数值 | 参数 | 数值 | |
| 整车质量m /kg | 1230 | 质心高度 | 0.54 | |
| 整车绕z轴转动惯量 | 1480 | 前轮轮距 | 1.485 | |
| 质心到前轴距离 | 1.065 | 后轮轮距 | 1.480 | |
| 质心到后轴距离 | 1.535 | 车轮半径 | 0.51 |
式中:
1) 双移线、角阶跃工况. 初始车速
图 9
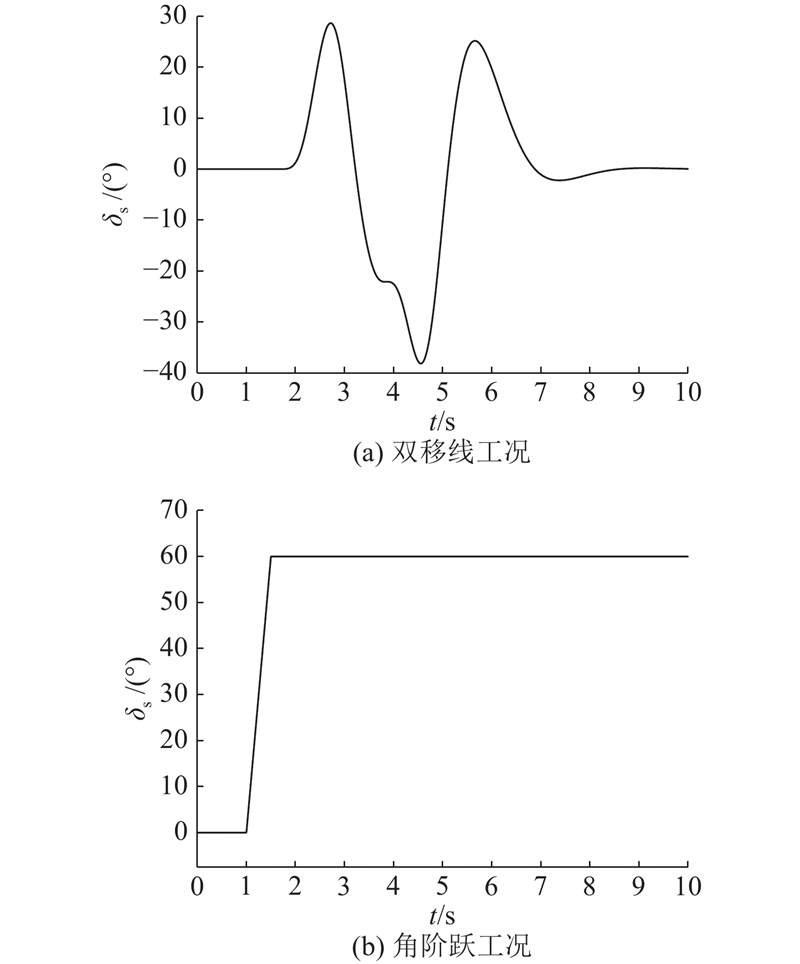
表 3 2种工况估计结果的均方根误差
Tab.3
| 工况 | eRMSE | |||
| 运动学方式 (无自适应) | 运动学方式 (有自适应) | 运动几何方式 | 融合方式 | |
| 双移线 | 0. 087 | 0. 054 | 0. 098 | 0. 041 |
| 角阶跃 | 0. 199 | 0. 098 | 0. 070 | 0. 043 |
图 10
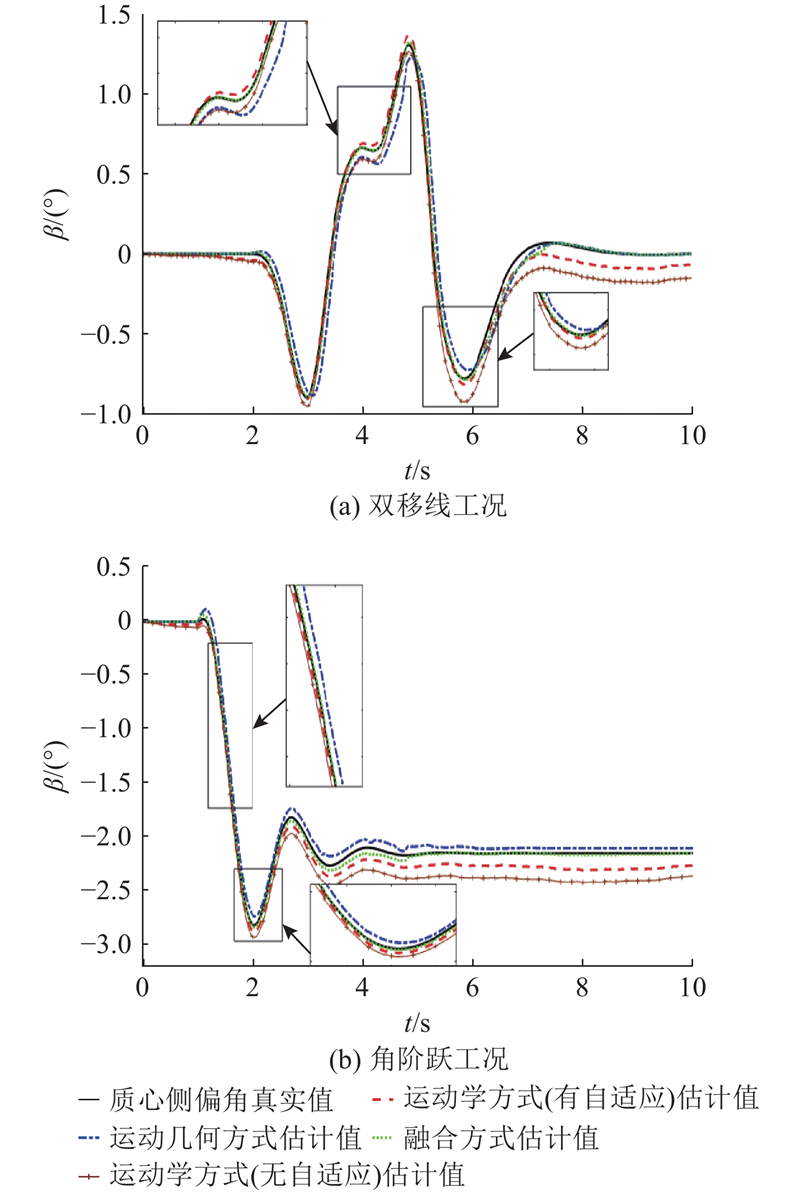
图 10 2种工况的质心侧偏角估计结果
Fig.10 Results of sideslip angle estimation for two conditions
2) 变路面附着系数对接路面-双移线工况. 为了验证所提观测器对路面附着系数变化的鲁棒性,选取文献[5]中提出的融合估计方式作为类比对象,记为融合方式B,该方式的估计精度依赖于路面附着系数的准确性. 所提观测器记为融合方式A. 利用变路面附着系数对接路面-双移线工况进行验证,在Carsim中设置长直道,纵向0~300 m路面附着系数
图 11
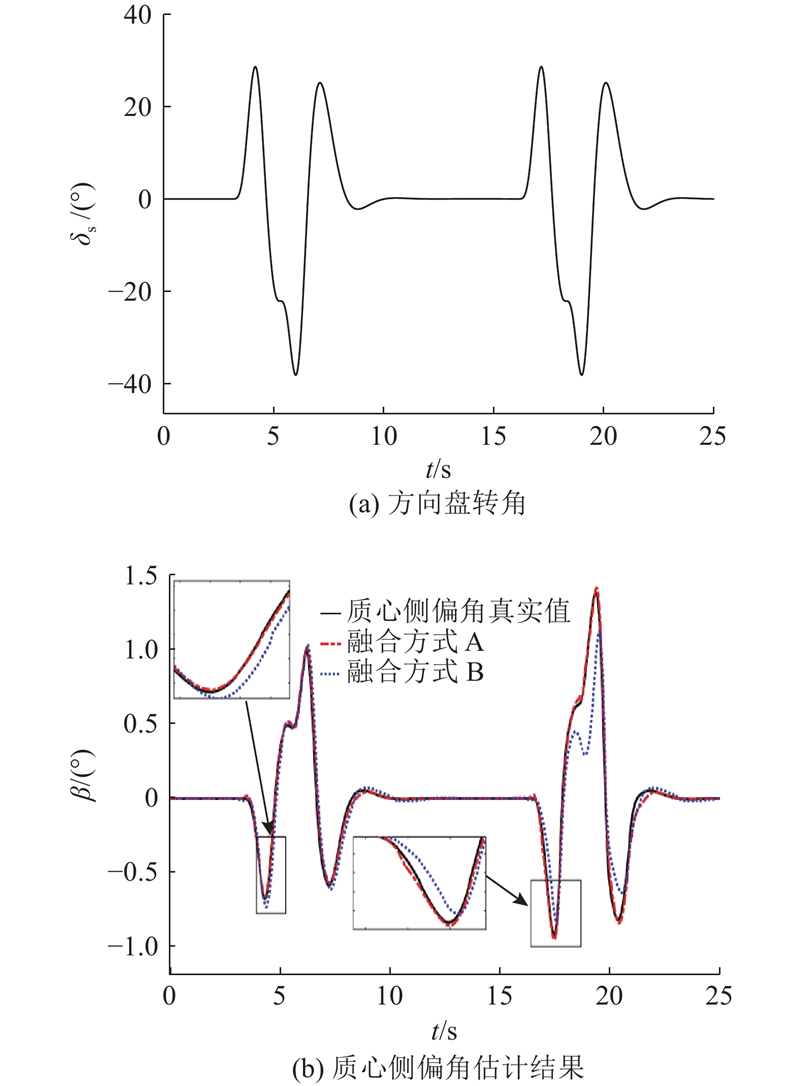
图 11 变路面附着系数对接路面-双移线工况
Fig.11 Variable road friction coefficient docking road-double lane change condition
3) DIL试验. 为了进一步验证所提观测器的有效性与实时性,开展DIL,如图12所示为DIL仿真平台. 初始车速
图 12

图 13
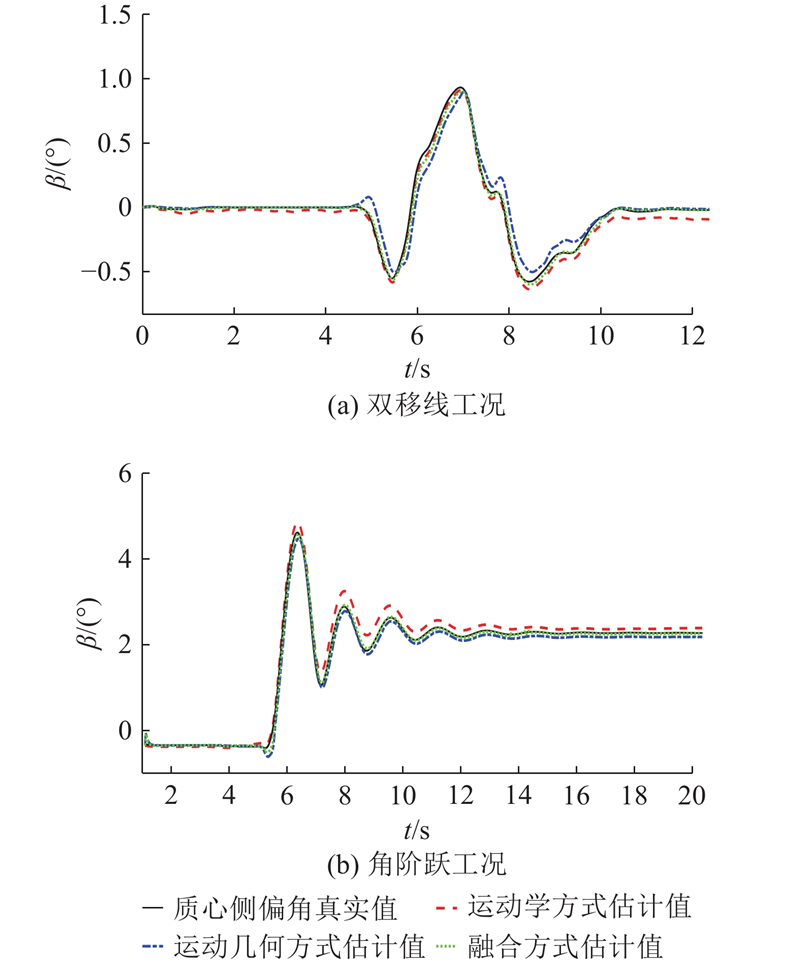
图 13 2种工况的驾驶员在环试验质心侧偏角估计结果
Fig.13 Results of sideslip angle estimation of two conditions for driver in loop simulation test
表 4 驾驶员在环试验估计结果的均方根误差与观测器单步仿真平均用时
Tab.4
| 工况 | eRMSE | t/μs | |||
| 运动学方式 (有自适应) | 运动几何方式 | 融合方式 | |||
| 双移线 | 0.064 | 0.095 | 0.042 | 350 | |
| 角阶跃 | 0.184 | 0.133 | 0.071 | 321 | |
4. 结 语
设计可实现量测噪声协方差矩阵自适应以及轮胎侧偏刚度模糊自适应的质心侧偏角融合估计算法. 在Carsim-Simulink的仿真与驾驶员在环仿真平台展开的多工况试验结果显示,本研究设计的质心侧偏角融合观测器可实时获取较准确的质心侧偏角估计结果,即使在路面附着系数突变条件下,也能实现较准确估计. 所提融合估计算法的验证仅在Carsim-Simulink以及驾驶员在环仿真平台进行,后续考虑进行实车试验,对所提算法做进一步验证.
参考文献
Driving control algorithm for maneuverability, lateral stability, and rollover prevention of 4WD electric vehicles with Independently driven front and rear wheels
[J].DOI:10.1109/TVT.2011.2155105 [本文引用: 1]
Automotive safety systems
[J].
Vehicle handling improvement by active steering
[J].DOI:10.1076/vesd.38.3.211.8288 [本文引用: 1]
Evaluation of a sliding mode observer for vehicle sideslip angle
[J].DOI:10.1016/j.conengprac.2006.04.002 [本文引用: 1]
A fusion methodology for sideslip angle estimation on the basis of kinematics-based and model-based approaches
[J].
A variable structure extended Kalman filter for vehicle sideslip angle estimation on a low friction road
[J].DOI:10.1080/00423114.2013.877148 [本文引用: 1]
Design of a nonlinear observer for vehicle velocity estimation and experiments
[J].DOI:10.1109/TCST.2010.2043104 [本文引用: 1]
Review of vehicle state estimation problem under driving situation
[J].DOI:10.3901/JME.2009.05.020 [本文引用: 1]
Vehicle dynamic state estimation: state of the art schemes and perspectives
[J].DOI:10.1109/JAS.2017.7510811 [本文引用: 1]
State estimation of distributed drive electric vehicle based on adaptive extended Kalman filter
[J].DOI:10.3901/JME.2019.06.156 [本文引用: 2]
Development and experimental evaluation of a slip angle estimator for vehicle stability control
[J].
New adaptive approaches to real-time estimation of vehicle sideslip angle
[J].DOI:10.1016/j.conengprac.2009.07.002 [本文引用: 1]
Vehicle sideslip angle estimation based on fusion of kinematics-dynamics methods
[J].
汽车质心侧偏角融合估计方法
[J].
Fusion estimation of vehicle sideslip angle
[J].
Adaptive two-stage extended Kalman filter for a fault-tolerant INS-GPS loosely coupled system
[J].DOI:10.1109/TAES.2009.4805268 [本文引用: 1]
A methodology for vehicle sideslip angle identification: comparison with experimental data
[J].DOI:10.1080/00423110601059112 [本文引用: 2]
A reliable fusion methodology for simultaneous estimation of vehicle sideslip and yaw angles
[J].DOI:10.1109/TVT.2015.2496969 [本文引用: 1]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}