

传统装备制造业领域常采用双指及以上的刚性机械手抓取目标件,减少刚性接触对目标件的影响和损伤要求机器人获取目标件的高精准位置. 机器人在抓取过程中,利用各种传感器反馈动力或位置,确保抓取的可靠性,但这种抓取方式极大地增加了机械手的工作复杂度. 另外,刚性机械手通常体积和重量较大,机械手工作时的功耗也较大[6]. 柔性机械手除了具有质量轻、体积小、速度快、能耗小、适应性强等优点外,还具有高效贴合不同外形的目标件和控制夹取力的特点.
柔性机械手可分为2类:有指式和无指式. 一般有指式柔性机械手以如人手、章鱼触手的生物结构架构为基础[7],采用气动驱动的方式实现对目标物体的柔性抓取. 有指结构在工作时需要驱动手指间的协调配合,因此对控制系统的要求较高. Lionel[8]制作的自适应机械手指Pacome无需传感器,控制比较简单. Ilievski等[9]研制的气动软体机器人可以抓取不同目标件. Littlefield等[10]设计了真空夹持器. Anver等[11]基于3D打印技术制造的柔性手指可以抓取最大重量为180 g的目标件. 董增雅等[12]制造结构精简、具有吞咽功能的果蔬采摘柔性机械手,解决了机械手采摘果实时抓取易损伤果皮表面的问题. 金波等[13]应用欠驱动原理研制的柔性机械手,可以顺利抓取不超过300 g的目标件. 王作桓等[14]设计的四指柔性机械手,应用直流电机驱动拉伸平带使手指关节实现缓慢弯曲运动. 耿德旭等[15]提出新颖的气压驱动多指柔性机械手. 杨孟涛等[16]设计的组合式气动柔性机械手扩展了气动柔性机械手的功能和使用场合.
多样性目标件的夹取使得机械手既要满足对不同外形目标件的适应性夹取,又要实现对夹取力的控制. 基于低成本、高可靠性与稳定性的设计原则,本研究采用并设计有指式复合驱动形式、适应多种目标件夹取的柔性机械手. 提取几类具有典型特征的目标件特征进行包络拟合,得出机械手运动原理,设计本研究的机械结构. 建立机械手的手指数学模型和目标件夹取运动学方程,根据Matlab计算结果优化机械手结构尺寸,并对机械手的弹簧进行设计与选型. 建立机械手在夹取微偏状态下包络夹取圆柱形目标件的静力学模型,仿真验证静力学求解结果. 基于以上分析,制作柔性机械手机械并搭建控制系统,验证柔性机械手的夹取性能.
1. 双指柔性机械手设计原理与分析
柔性机械手以电机驱动,通过改变气缸压力控制机械手夹取力,实现对不同材质、外形的物体的适应性夹取. 为了实现夹持精准控制,双指柔性机械手的气缸有效工作压力控制在0.3~0.8 Mpa. 目标件在加工前,使用较大的夹紧力夹持目标件到卡盘夹具上料,可以增加目标件的上料稳定性;加工完成后,由于目标件表面质量比较高,加持力过大会损伤加工表面质量,可以控制调整气缸的气压来改变夹紧力进行夹取. 液压驱动能够满足机械手较大夹紧力的需求,但液压系统复杂,不适合实际应用. 电机驱动式可以保证机械手的夹取精度要求,但对夹取力的控制比较复杂. 气动驱动夹取可以调整夹取力,但无法精确控制夹爪的运动. 复合驱动既能满足高精度控制,又可以实现精确夹取,是比较理想的驱动方式. 柔性机械手采用步进电机和气缸分别驱动的方式,柔性机械手的设计原理图如图1所示. 图中,步进电机通过丝杆螺母传动,推动活动板前后向运动;连杆连接指根节与活动板,调整颚板开合状态,以适应不同尺寸目标件的夹取. 指尖卡爪由手指气缸推动,通过气缸推拉控制卡爪张开和夹紧. 在夹紧过程中指尖节与中指节贴合目标件的外轮廓.
图 1
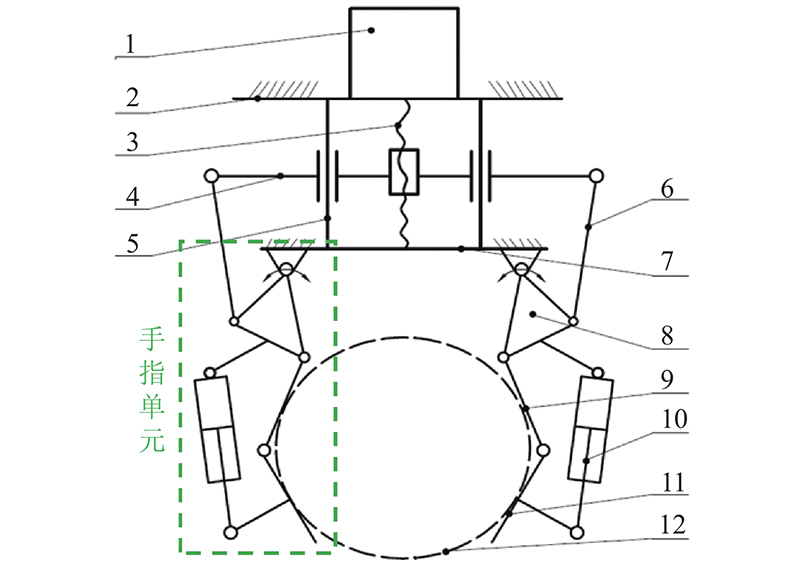
图 1 柔性机械手原理简图
1-步进电机; 2-上固定板; 3-丝杆; 4-活动板; 5-导向支撑柱;6-活动板颚爪推杆; 7-固定底板;8-颚板; 9-中指节;10-气缸; 11-指尖; 12-目标件 Schematic diagram of flexible manipulator
本研究设计的双指柔性机械手,适用于夹取1)不同尺寸、外形的目标件,2)表面质量要求较高的目标件,3)薄壁易变形的目标件. 柔性机械手设计目标如下: 1)提升抓取适应性,完成目标件尺寸为30~150 mm的抓取工作;2)实现抓取力为15~50 N的精准控制;3)具有水平方向±10 mm的位置调整功能.
1.1. 柔性机械手数学模型建立与运动学分析
建立机械手各点与机械手手指3个指节转动角度间的数学关系,简化后的手指模型如图2所示. 建立机械手手指的笛卡尔坐标系,原点O为底盘中心点,点A为颚爪铰链的中心,点B、C为2个铰链的中心,以通过机械手手掌中心的垂线为Y轴、过点O的水平线为X轴. 点O沿X轴平移L得到点A的坐标变换为
图 2
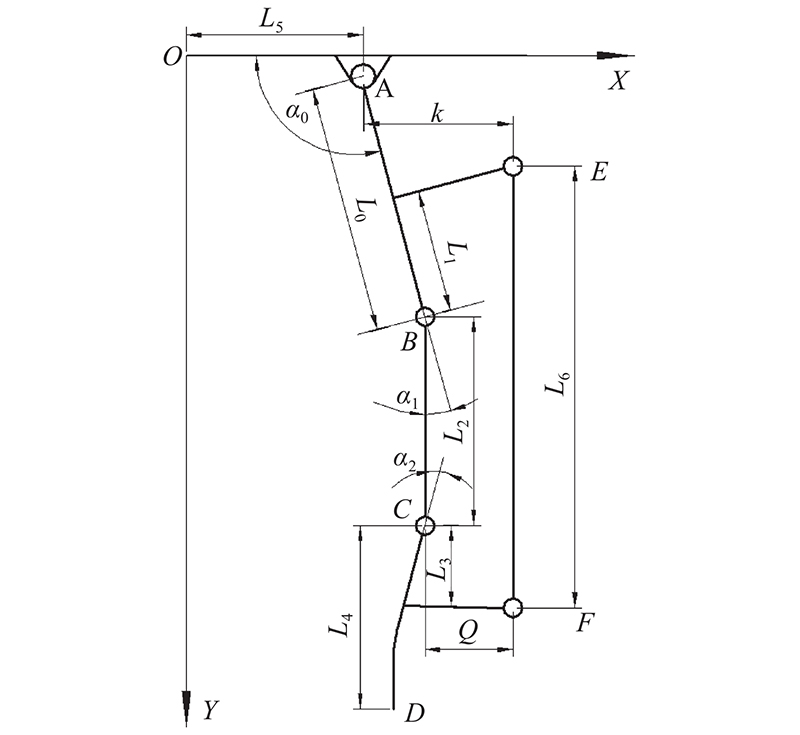
点A绕Z轴转动α0,沿转动后的坐标系Y轴移动L0−L1,沿转动后的X轴移动K,得到点E的坐标变换为
点A绕Z轴转动α0,沿转动后的Y轴移动L0,得到点B坐标变换为
点B绕Z轴转动α1,沿转动后的Y轴移动L2,得到点C的坐标变换为
点C绕Z轴转动α2,沿着转动后的Y轴移动L4,得到点D坐标变换为
点C绕Z轴转动,沿着转动后的Y轴移动L3,沿转动后的Z轴移动q,得到点F的坐标变换为
点O的坐标为(0, 0); 点B的坐标为(Bx, By),其中
点C的坐标为(Cx, Cy),其中
点D的坐标为(Dx, Dy),其中
点E的坐标为(Ex, Ey),其中
点F的坐标为(Fx, Fy),其中
1.2. 机械手X方向微偏位置位移与微偏状态夹取运动学分析
1.2.1. 产生柔性机械手微偏夹取的原因分析
实际应用过程中,机械手夹取过程常处于非理想状态,因此分析机械手微偏夹取姿态尤为重要. 以圆柱体目标件为例,如图3所示为机械手对圆柱件偏移夹取时的几何模型图. 当柔性机械手在夹取目标件时,在理想状态下,线段BC与CD相切于圆柱形外轮廓面,连接点C与2个接触点距离相等,且点C与圆柱圆心的连线呈水平状态;在实际应用中,夹取位置点的值取决于线段EF. 由于EF不是定值,可以由气缸代替. 气缸压力的大小决定E'F'与EF的长度是否相等. 如果左右两侧气缸压力相等,那么柔性机械手对圆柱体目标件的夹取处于理想状态,否则处于偏移夹取的状态.
图 3

图 3 柔性机械手对圆柱类零件微偏夹取原理图
Fig.3 Schematic diagram of flexible manipulator for slightly offset clamping of cylindrical parts
1.2.2. 夹取圆柱类零件时微偏夹取模型的建立与运动学分析
在实现微偏状态时,以ABE段为固定基础进行运动学状态分析. 此时,角度α0为假定可知量,目标件直径R、预设偏移值s均可作为圆柱类设定参数. 根据如图3所示微偏状态的原理建模,位置微调偏移目标件圆心坐标为
C点坐标为
连心线CC'方程为
圆心点P'到BC段的距离方程ZP'BC为
圆心点P'到B'C'段的距离方程为
添加约束条件:圆心P'在连心线CC'上,ZP'BC=R,ZP'B'C'=R,其中P'=(xCC', yCC')为偏移后圆心点坐标. 偏移值方程为XCC'=P'x−Px , YPP'=P'y−Py. 在理想状态下,Px=0,预设偏移XCC'=P'x . 通过改变EF段长度实现目标件X方向的微调,其中伸缩量设置为μ、η. 给出μ与所希望取得偏移XCC'的关系方程,确定EF变杆调整伸缩量μ与η值.
由连心线CC'与连杆BC的角度递推角度α2的方程为
y方向偏移补偿m的计算式为
假设在非理想状态下,机械手夹取半径为50 mm的圆柱形目标件时产生5 mm的偏移,分别在角度α0=55°、60°、65°进行参数拟定,将XCC'=
表 1 微调偏差运动状态参数
Tab.1
| | | | | | | |
| 55 | 50 | 0.466 | 97.291 | 51.61 | 45.14 | 59.03 |
| 60 | 50 | 0.363 | 101.272 | 40.92 | 35.00 | 47.52 |
| 65 | 50 | 0.295 | 104.277 | 30.73 | 25.26 | 36.74 |
| 65 | 55 | 0.414 | 103.221 | 37.05 | 30.93 | 44.05 |
| 65 | 60 | 0.947 | 100.389 | 45.58 | 38.23 | 55.73 |
1.3. 双指柔性机械手结构设计
1.3.1. 双指柔性机械手结构总成
建立双指柔性机械手结构总成如图4所示,整体结构由机械手手指、手指驱动、位置微调与减震4个部分组成. 图中,机器人末端固定板由螺栓与机器人固定连接,偏移结构实现机械手指的角度调整,指根节驱动结构推动手指前后移动,压力感应片通过机械手指上的力反馈,将监测得到的夹取力数值输入单片机,单片机控制电控调压阀调整气缸气压,实现机械手夹取力的控制.
图 4
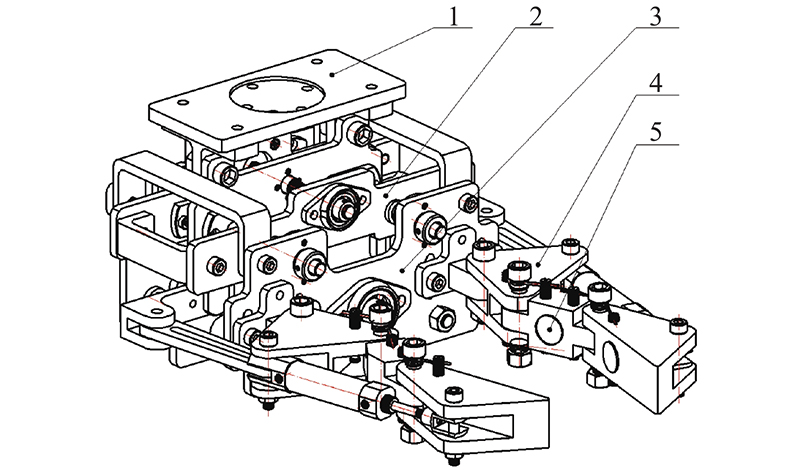
图 4 双指柔性机械手总体结构图
1-机器人末端固定板; 2-偏移机构; 3-指根节驱动机构;4-机械手手指; 5-压力感应片 Overall structure of two-finger flexible manipulator
1.3.2. 机械手手指结构与驱动机构设计
如图5所示为双指柔性机械手的手指结构图,包括左、右卡爪和卡爪固定板. 手指结构分为3个部分:指根节、中指节、指尖节. 各部分间均由固定销轴连接,指根节与中指节间安装有扭弹簧6,中指节与指尖节间安装有扭弹簧17. 双指由指根固定座连接于指根固定基板.
图 5

图 5 双指柔性机械手手指部分的结构图
1-指尖节;2-Y型气缸接头;3-指尖节连接销; 4-手指驱动气缸;5-中指节固定销 ;6-扭弹簧2固定件;7-指根节推杆;8-指根节; 9-涡卷弹簧; 10-指根节固定基板; 11-卡簧;12-指根节固定销; 13-指根节; 14-气缸尾座固定销; 15-中指节;16-固定件; 17-扭弹簧;18- Y型接头连接销 Structure diagram of finger part of two-finger flexible manipulator
图 6
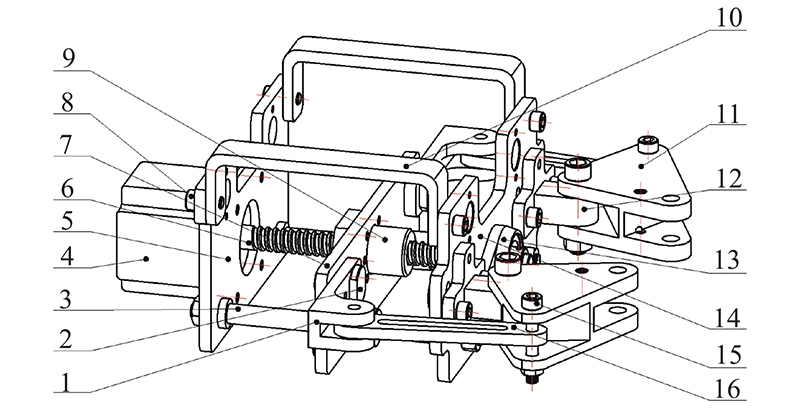
图 6 机械手手指驱动部分的结构图
1-推杆摆臂;2-推杆臂销轴; 3-导向支撑柱;4-主步进电机; 5-主电机固定板; 6-主驱动丝杆;7-指根节驱动部分推板;8-螺母; 9-主驱动丝杆螺母; 10-“[”形固定件; 11-指根节; 12-指根节固定座;13-主驱动丝杆菱形轴承座;14-主电机前固定板 ;15-气缸尾座固定销; 16-指根节推杆 Structure diagram of finger drive part of manipulator
表 2 机械手实物尺寸参数
Tab.2
| 参数 | 数值 | 参数 | 数值 | |
| 指根节两连孔距L0 | 55 | 指尖节销孔接距L3 | 50 | |
| 指根节推杆孔距L1 | 45 | 指尖节孔到指尖L4 | 70 | |
| 指根节孔到边距K | 50 | 指尖节销孔定位Q | 26 | |
| 中指节两连接孔L2 | 55 | 指根座连接点距L5 | 68 |
1.4. 柔性机械手仿真分析
1.4.1. 建立柔性机械手Adams仿真模型
采用UG建立柔性机械手三维模型,将机械手三维模型导入Adams以确定零件间的运动关系、力学关系和驱动方式. 建立仿真模型的步骤如下:1)导入三维模型,2)判断柔性机械手的具体运动形式以添加约束,3)施加载荷,4)仿真分析并进行数据处理. 完成建模后,进行柔性机械手双爪的圆柱件、长方体类零件抓取仿真.
1.4.2. 柔性机械手静态模型仿真
由抓取长方体件的物体力学模型计算得出,目标件宽度和质量均与气缸推力正相关,因此推断夹取目标件宽度变化会导致夹取力改变. 在抓取长方体目标件时,设定目标件的宽度分别为40、45、50 mm. 设定目标件的初始质量为0.6 kg,手指与被抓物体接触时的静摩擦系数为0.3. 在Adams中建立宽度为80 mm,高为45 mm,长为120 mm的长方体,设长方体上表面与机械手固定板下表面的距离为135 mm. 如图7所示为机械手夹取长方体类目标件的仿真图,仿真得出的扭转角度α0计算结果如图8所示. 可以看出,机械手扭转角α0在机械手夹取宽度为50 mm目标件的轨迹终端最终停留角度71°位置,该数值与理论计算的夹角一致;α1为目标件相对于中指节的变化角度,该角最终稳定在角度180°位置.
图 7
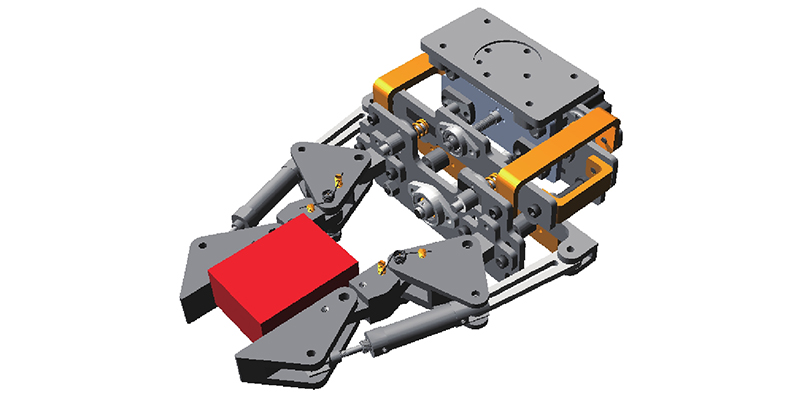
图 8
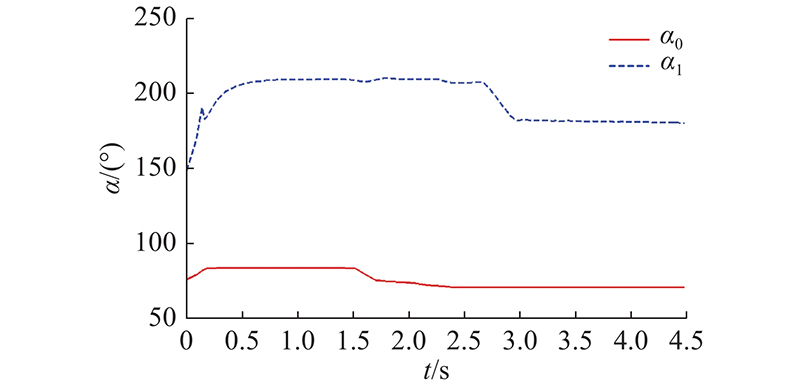
图 8 夹取长方体类目标件时指根节扭转角度变化图
Fig.8 Change diagram of torsion angle value of finger root segment when clamping cuboid part
对夹取圆柱形目标件进行力学模型搭建并计算分析,机械手夹取圆柱件时的仿真效果图如图9所示. 目标件直径和质量均对气缸推力有影响,目标件直径对扭转角度α0和中指节角度α1互为增量关系. 设定目标件半径R=50、55、60 mm. 设定目标件质量为0.6 kg,设置手指与被抓物体接触时的静摩擦系数为0.2. 在Adams中建立半径为50 mm,高为45 mm,并与大地设立平移副的圆柱体. 理论计算得圆柱体轴心与机械手固定板下表面的距离Y0=197 mm. 如图10所示,扭转角度α0在机械手夹取半径为50 mm目标件时的变化轨迹终端最终停留在55°,该数值与预设的夹角一致;目标件相对于机械手坐标XZ平面的距离停留在197.20 mm,理论计算结果为197.24 mm与仿真结果近乎相等.
图 9
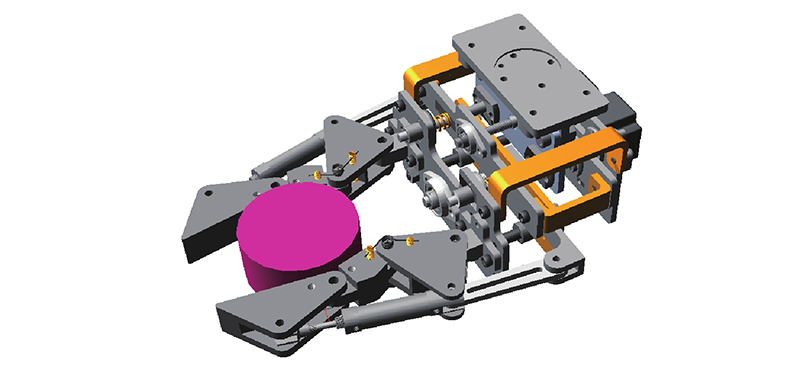
图 10
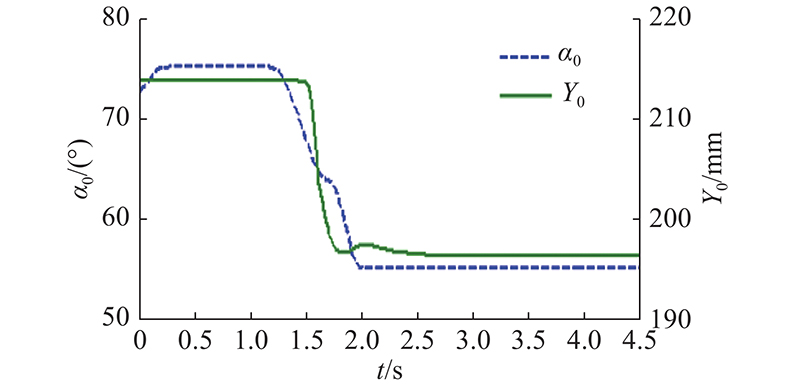
图 10 机械手夹取直径为100 mm的圆柱件时扭转角度与圆柱体到机械手固定板的间距变化图
Fig.10 Change value of torsion angle and distance from cylinder central axis to fixed plate of manipulator when griping cylindrical target part (Φ=100 mm)
如图11所示为柔性机械手夹取直径为100 mm的圆柱体时,中指节与指尖节对目标件夹持力F1、F2随时间变化情况. 图中,F1为机械手指尖节与被夹圆柱件的接触力,过圆柱轴心;F2为机械手中指节与被夹圆柱件的接触力,过圆柱轴心. 可以看出,2个接触力近乎相等,同时趋向于22. 83 N,表明仿真结果数据的正确性. 当机械手微偏夹取圆柱件时, F1、F2须建立夹取状态的理论模型进行分别计算.
图 11

图 11 机械手夹取直径为100 mm的圆柱件夹取力变化图
Fig.11 Change graph of clamping force for clamping cylindrical part (Φ=100 mm)
研究双指柔性机械手对长方体、圆柱形目标件的抓取性能,对计算结果进行仿真验证. 通过分析柔性机械手对长方体、圆柱形目标件的夹取状态,建立机械手对目标件包络夹取时的静力学模型,递推受力关系并建立平衡方程. 采用Matlab计算机械手在夹取固定形状目标件时的受力和机械手手指的运动轨迹. 机械手三维模型导入Adams建立相应的约束与驱动,分析机械手在夹取长方体与圆柱形目标件时的状态以及受力情况,得出结果与实际理论计算结果相符合.
2. 柔性机械手控制系统平台搭建
2.1. 柔性机械手控制系统分析
上位机的搭建主要是建立PC端软件界面,C语言编程快速调整下位机参数. 选择Windows环境下的MFC编程界面,将任务分为状态选择区、功能交互区、实时监控区和通信设置区,并设定波特率. 状态选择区是切换自动模式与手动模式的功能区. 功能交互区起调试步进电机和气缸的作用;当输入脉冲时柔性机械手位置移动到预设位置,验证自动运行时位置的正确性. 实时监控区采集柔性机械手的反馈信号(夹取状态)和电机位移. 通信设置区针对上位机与下位机的通信设置,比如两者通信时的波特反馈信息显示区,通过显示区收集信息反馈. 如图12所示为机器人与机械手控制系统流程图. 因为ABB机器人控制器与柔性机械手控制器是2个独立的控制单元,所以两者间须搭建通信控制电路. 机械手控制器与压力传感器构成正向反馈电路,可以有效实现机械手夹取力的调节.
图 12

在夹取目标件时,压力传感器接收到的压力(接触压力)经过下位机,通过串口通信上传到信息显示区. 如图13所示为PC端控制柔性机械手的控制界面图. M1代表主步进电机,负责指根节的移动;M2代表控制气缸调压阀的步进电机,通过压力传感器与电控调压阀反馈的数据实现PID控制,步进电机调节调压阀气压. 左右气缸由调压阀控制,或者恒定其中一个气缸的气压,通过控制另一个气缸实现气缸压差,达到微偏夹取的目的. M1、M2可以分别设定速度、正反转方向. 下位机控制器选择 Arduino 开发板,主控芯片为ATMega328P,内置步进电机驱动模块、串口通信模块. 气缸状态可以通过截面按钮,在手动模式下使用,如图14为控制系统接线图.
图 13
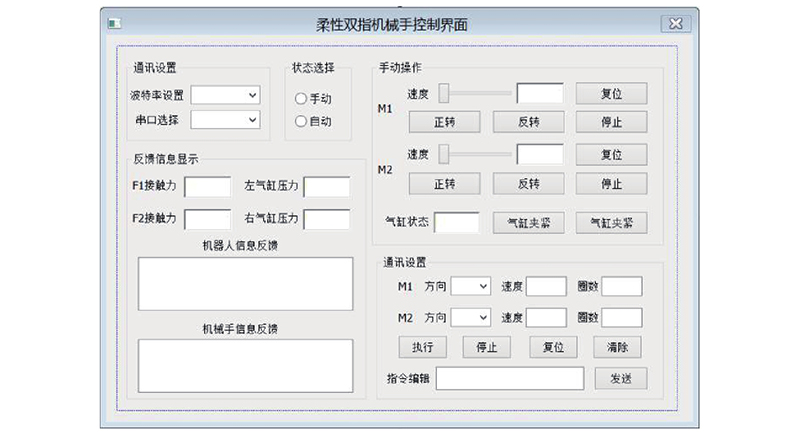
图 14

2.2. 机器人系统平台的组成与搭建
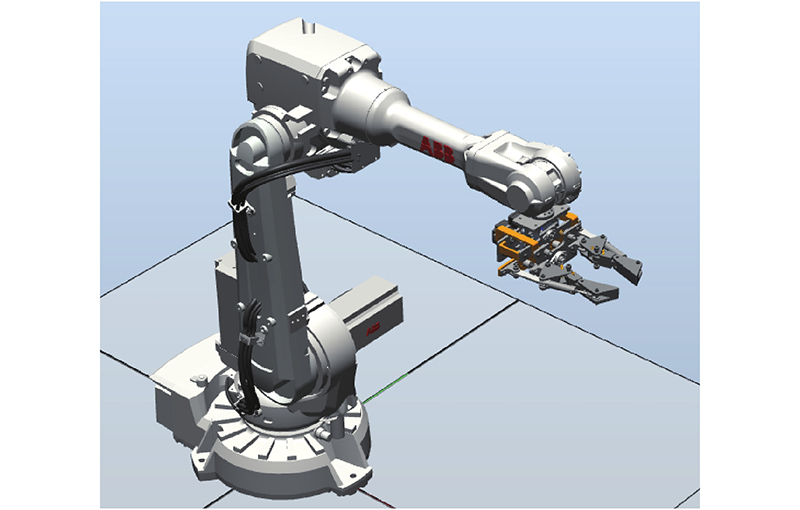
机器人系统本体选择ABB机器人,型号为IRB2600,负载为12 kg,建立机器人位姿状态并进行运动仿真. 机器人与柔性机械手安装时须注意以下几点. 1)机器人末端的6轴固定盘的孔位已经给出,进行实际测量后,在机械手末端连接件上打孔再配合. 2)由于选用的机器人末端负载为12 kg,设计柔性机械手时应选用轻质材料. 3)机器人与下位机通信时,两者的电压值不同,须使用继电器连接. 柔性机械手的信号线为Arduino开发板的IO口7.
图 15
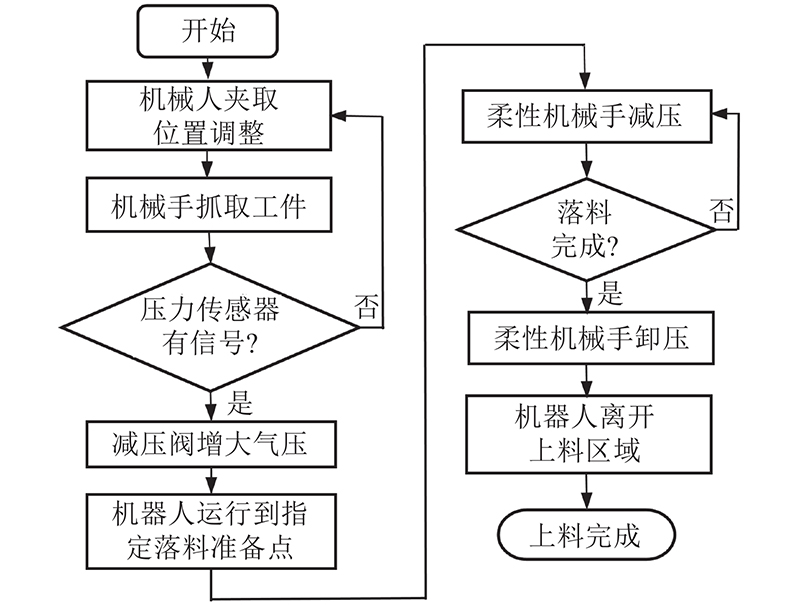
图 16
3. 双指柔性机械手抓取实验
3.1. 双指柔性机械手尺寸参数验证
表 3 机械手设计尺寸与实物尺寸对比
Tab.3
| 参数类型 | L0 | L1 | L2 | L3 | L4 | L5 | K | Q |
| mm | ||||||||
| 设计 | 55.00 | 45.00 | 55.00 | 50.00 | 70.00 | 68.00 | 50.00 | 26.00 |
| 实际 | 55.18 | 44.86 | 55.24 | 50.06 | 69.82 | 67.94 | 49.86 | 26.04 |
表 4 机械手扭弹簧参数的设计数值与实际数值对比
Tab.4
| 参数类型 | k1, k2/(N·mm) | d1, d2/(mm) | a1, a2/(°) |
| 设计 | 8.67, 3.50 | 1.60, 1.20 | 0, 0 |
| 实际 | 8.52, 3.56 | 1.58, 1.22 | 2.1, −3.2 |
3.2. 双指柔性机械手控制系统的组成
柔性机械手的上位机与下位机连接后,在PC端操作界面进行柔性机械手定位抓取测试. PC端连接单片机后,控制板控制步进电机驱动器,并接收压力传感器的信号输入,采用机器人示教器对机器人的运行轨迹进行编程测试. 在设定夹取位置后,通过示教器对机器人的轨迹进行编程与调整,在程序内嵌入控制信号输出,表示机器人已经到达预设所处的上料位置;对柔性机械手进行信号交换,开启下一步的动作,控制板下达夹取指令. 如图17所示为双指柔性机械手实物及其控制系统平台.
图 17
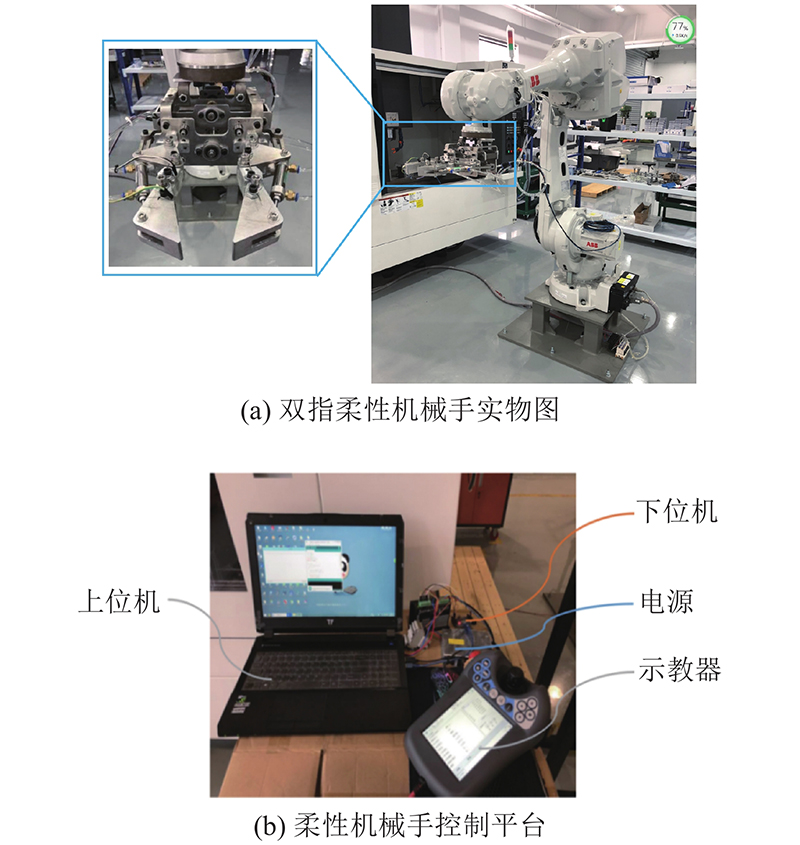
图 17 双指柔性机械手及其控制平台
Fig.17 Two finger flexible manipulator and its control platform
3.3. 双指柔性机械手手指的活动试验
主步进电机转动通过滚珠丝杆带动推板前后运动,推板的前后运动决定指根节的开合角度. 测定双指柔性机械手的指根节与指根固定板间的夹角,可以有效地验证柔性机械手在夹取时指节运动精度. 如图18所示为指根节运动理论与实际值对比图. 图中,Yh为指根节推板的移动距离,α0为指根节的夹角测量角度. 可以看出,实际值曲线贴近理论值曲线,但曲线的上下半段均有偏移. 产生这种情况的原因推测有以下几个. 1)指根节与指根固定座间存在装配误差,即孔对孔的配合存在间隙;在90°位置产生两侧偏离,销轴孔连接时,间隙由左限位移动到右限位造成的偏离误差. 2)推板与步进电机连接件间存在装配误差,同时直线轴承与导向支撑杆存有间隙,也会造成推板窜动误差. 3)卡尺的制造误差导致不可避免的测量误差.
图 18
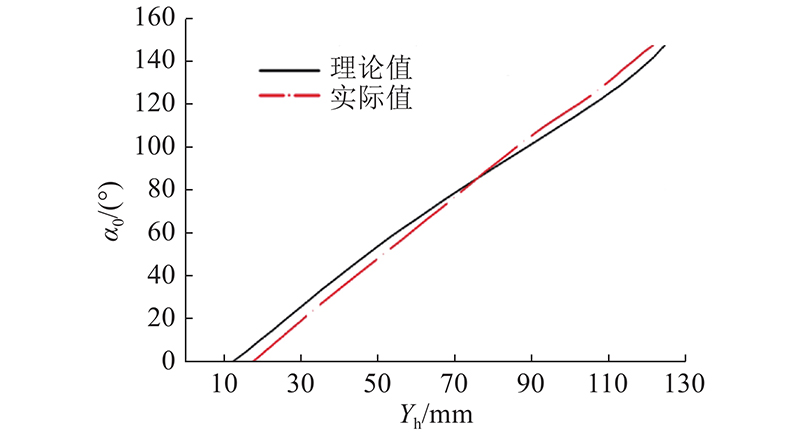
图 18 机械手指根节扭转角与指根节推板移动距离的关系
Fig.18 Relationship between torsion angle of finger root and moving distance of finger root push plate
选取圆柱件进行机械手夹取力试验. 如图19所示为双指柔性机械手夹取直径为100 mm的圆柱件时的夹取力情况图. 可以看出,F1、F2的实际值曲线趋势均趋向于理论值的,但实际值曲线均在理论值下方,且2条实际值曲线不完全相等. 产生这种情况的原因有以下几个. 1)指尖节与中指节的铰接处存在摩擦力,在实际测试中因损耗产生误差. 2)2个气缸存在细小的压差,在此作用下夹取角度会产生轻微变化,使F1、F2的值不相等. 3)压力传感器本身存在测量误差. 由于电阻式传感器对接触表面有一定要求,如果接触面不平整就会影响测量精度,从而影响整个测量结果.
图 19
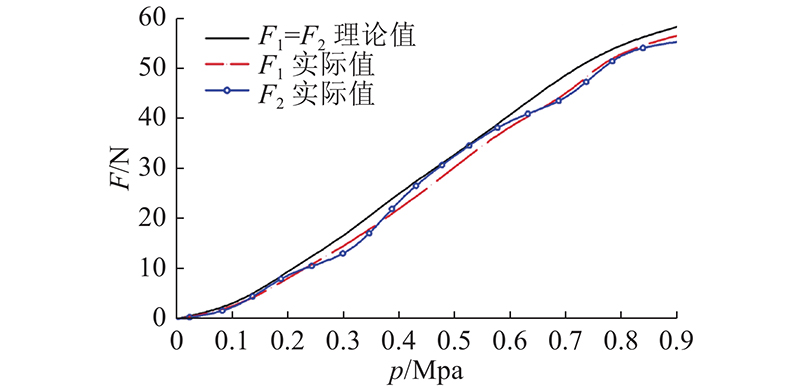
图 19 机械手夹取直径为100 mm圆柱件时夹取力与气压的关系
Fig.19 Relationship between clamping force and air pressure when clamping cylindrical part (Φ=100 mm)
3.4. 双指柔性机械手抓取适应性验证
如图20所示为机械手抓取不同外形目标件的状态图. 图20(a)中,指节和指尖节与目标件的外轮廓贴合,即夹取方形物体时中指节与指尖节呈现直线状态,实现目标件的贴合夹取. 图20(b)中,目标件质量为300 g,外径为90 mm,内径为30 mm,厚度为30 mm. ;中指节与指尖节与目标件的外轮廓贴合,即中指节与指尖节对圆柱件呈现2条相贯线的状态,实现对目标件的贴合夹取. 实际应用中机械手要实现贴合目标件的外轮廓面,因此设计的柔性机械手采用可转位的指根座. 图20(c)中,中指节和指尖节与目标件的外轮廓贴合,机械手完成目标件夹取动作. 夹取目标件时中指节与指尖节呈现直线状态,指根座有相应角度的旋转,对垂直状态实现中指节与指根节对梯形倾角面的贴合状态. 图20(d)中,中指节与指尖节与目标件的外轮廓贴合,即夹取方形物体时中指节与指尖节对目标件呈2条相贯线,机械手完成目标件夹取动作. 夹取目标件时中指节与指尖节呈现直线状态,指根座有相应角度的旋转,对垂直状态实现中指节与指根节对圆锥面倾角面的贴合状态.
图 20

图 20 机械手夹取长方体件、圆柱件和倾角类零件状态图
Fig.20 State diagram of manipulator gripping cuboid, cylindrical and oblique parts
4. 结 论
(1)分析柔性机械手的设计原理并建立数学模型. 通过创新结构设计,提升柔性机械手的夹取范围和夹取适应性. 应用Matlab描述柔性机械手夹取不同特征目标件时的夹取状态以及工作特征.
(2)研究夹取性能并仿真分析. 进行柔性机械手夹取不同外形目标件的静力学与运动学分析,研究机械手微偏包络抓取圆柱体非理想状态的抓取情况. 建立柔性机械手的三维模型,应用Adams验证柔性机械手夹取不同目标件的理论模型,分析柔性机械手的运动学.
(3)设计和搭建控制系统. 根据柔性机械手驱动要求和夹取力的控制要求,选择合适的步进电机作为驱动器,完成机械手手指的气动回路设计. 使用 PC端作为机械手控制界面,采用 Arduino语言编写控制系统下位机程序,完成控制系统搭建,实现机械手自动及手动抓取功能.
(4)制作并试验样机. 完成柔性机械手的加工与装配,搭建机械手控制系统平台. 对不同状态下、不同外形特征的目标件进行夹取试验,机械手可以轻松夹取质量为300 g的圆柱体目标件. 试验表明,实验结果与静力学模型理论计算误差为2%,夹持力理论值与实验值结果基本吻合;机械手对不同尺寸、不同形状、不同材质目标件的抓取适应性较好.
参考文献
智能制造: “中国制造2025”的主攻方向
[J].DOI:10.3969/j.issn.1004-132X.2015.17.001 [本文引用: 1]
Intelligent manufacturing: main direction of “Made in China 2025”
[J].DOI:10.3969/j.issn.1004-132X.2015.17.001 [本文引用: 1]
工业机器人上下料技术及数控车床加工技术组合应用研究
[J].DOI:10.3969/j.issn.1001-2265.2013.07.032 [本文引用: 1]
Study on groupware applications about industrial robot to load-unload workpiece and the processing technology of NC lathe
[J].DOI:10.3969/j.issn.1001-2265.2013.07.032 [本文引用: 1]
Analysis of robust control method for the flexible manipulator in reliable operation of medical robots during COVID-19 pandemic
[J].
Theoretical and experimental study on vibration control of flexible manipulator based on internal resonance
[J].
A light cable-driven manipulator developed for aerial robots: structure design and control research
[J].
基于电机驱动的仿生柔性机械手研究
[J].DOI:10.3772/j.issn.1002-0470.2019.04.007 [本文引用: 1]
Research on bionic soft gripper drived by motor
[J].DOI:10.3772/j.issn.1002-0470.2019.04.007 [本文引用: 1]
Soft robotics for chemists
[J].DOI:10.1002/anie.201006464 [本文引用: 1]
柔性吞咽机械手的结构设计与样机试验
[J].DOI:10.3969/j.issn.1001-4551.2018.12.009 [本文引用: 1]
Structure design and prototype test of flexible swallowing manipulator
[J].DOI:10.3969/j.issn.1001-4551.2018.12.009 [本文引用: 1]
果蔬采摘欠驱动机械手爪设计及其力控制
[J].DOI:10.3901/JME.2014.19.001 [本文引用: 1]
Design and force control of an underactuated robotic hand for fruit and vegetable picking
[J].DOI:10.3901/JME.2014.19.001 [本文引用: 1]
一种柔性机械手设计与分析
[J].DOI:10.3969/j.issn.1009-9492.2019.09.043 [本文引用: 1]
Design and analysis of a flexible manipulator
[J].DOI:10.3969/j.issn.1009-9492.2019.09.043 [本文引用: 1]
气动四指柔性机械手结构功能和抓取实验研究
[J].DOI:10.3969/j.issn.1001-3881.2019.09.003 [本文引用: 1]
Structure design and grasp experiment of pneumatic flexible four-finger hand
[J].DOI:10.3969/j.issn.1001-3881.2019.09.003 [本文引用: 1]
一种组合式气动柔性机械手设计
[J].DOI:10.11832/j.issn.1000-4858.2020.05.009 [本文引用: 1]
Design of a combined pneumatic flexible manipulator
[J].DOI:10.11832/j.issn.1000-4858.2020.05.009 [本文引用: 1]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}