复合驱动双指柔性机械手的设计与控制
Design and control of compound driven two-finger flexible manipulator
复合驱动双指柔性机械手的设计与控制 |
| 吴全会,邵旭辉,潘柏松,施罗杰 |
|
Design and control of compound driven two-finger flexible manipulator |
| Quan-hui WU,Xu-hui SHAO,Bai-song PAN,Luo-jie SHI |
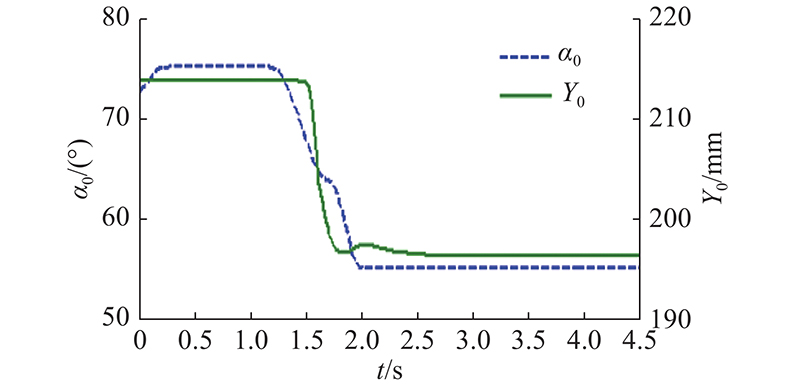
| 图 10 机械手夹取直径为100 mm的圆柱件时扭转角度与圆柱体到机械手固定板的间距变化图 |
| Fig.10 Change value of torsion angle and distance from cylinder central axis to fixed plate of manipulator when griping cylindrical target part (Φ=100 mm) |
|
|