|
|
|
| Nonlinear model predictive trajectory tracking for valve-controlled cylinder with counterbalance valve |
Qi WEI( ),Jianfeng TAO*(),Hao SUN,Yulei ZHANG,Chengliang LIU ),Jianfeng TAO*(),Hao SUN,Yulei ZHANG,Chengliang LIU |
| State Key Laboratory of Mechanical System and Vibration, Shanghai Jiao Tong University, Shanghai 200240, China |
|
|
|
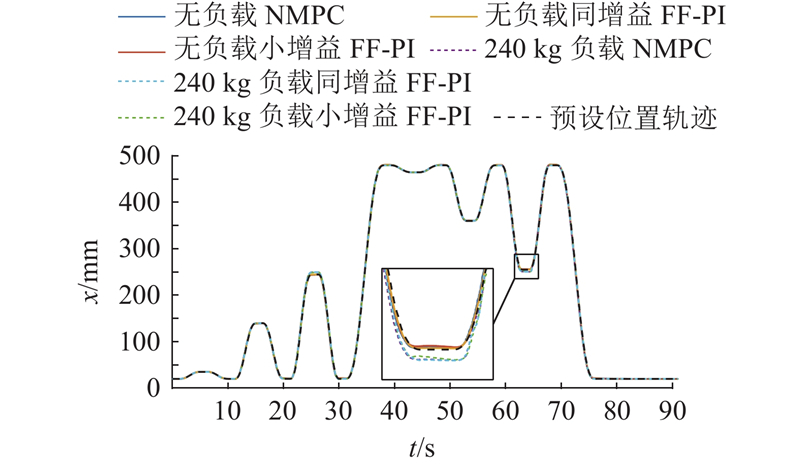
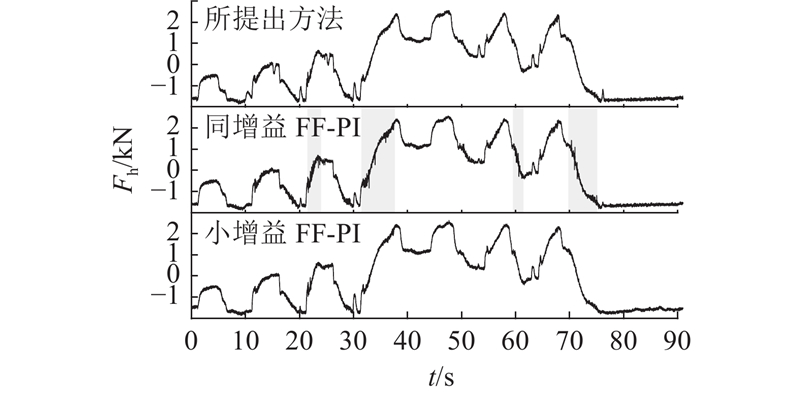
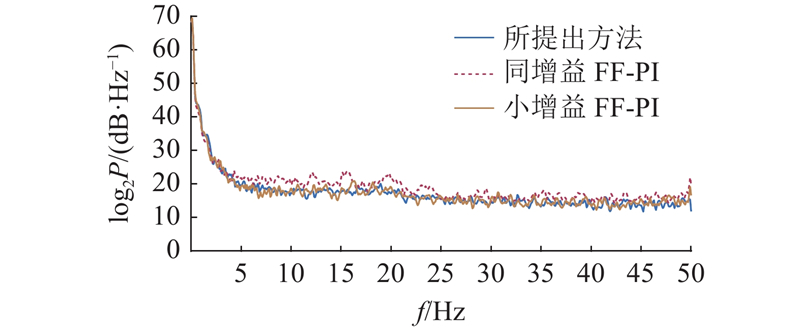
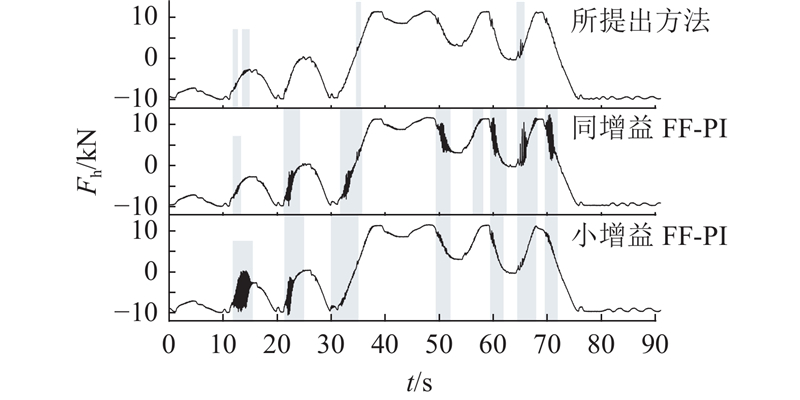
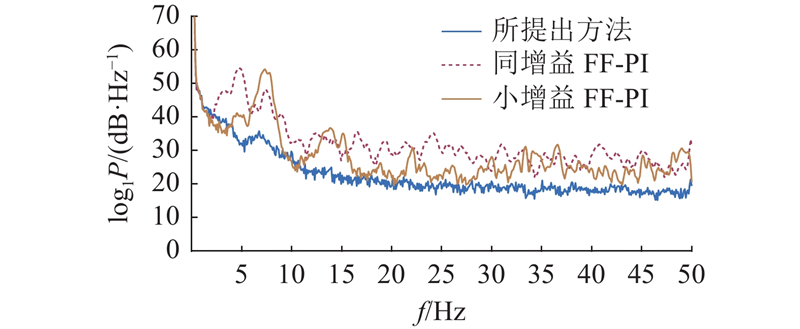
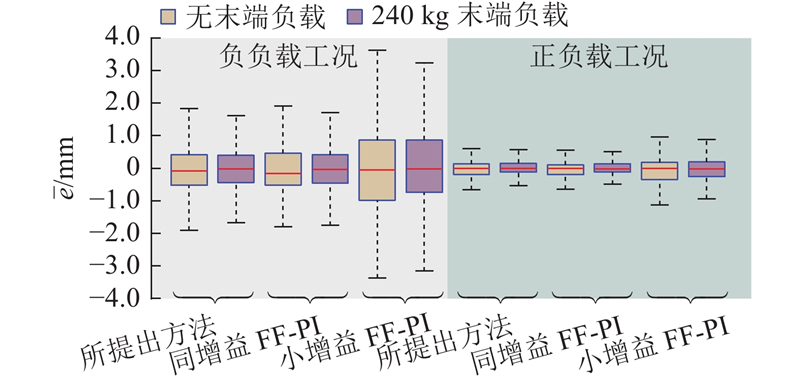
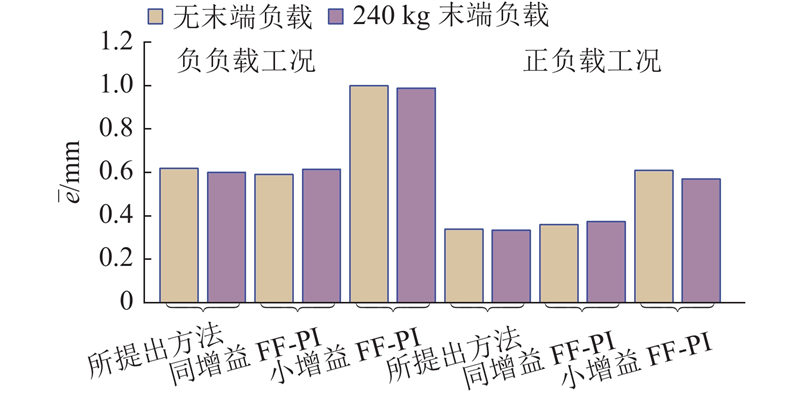
Abstract A nonlinear model predictive control (NMPC) method for trajectory tracking was proposed to address instability issues in valve-controlled cylinders with counterbalance valves. An affine nonlinear state-space model was derived through transformation and simplification based on the differential-algebraic equation model. Partial feedback linearization was used to derive the zero dynamics, revealing that the difficulty in analytically obtaining stability conditions for zero dynamics was the fundamental reason to global stabilization in systems with counterbalance valves. A local control Lyapunov function (CLF) was constructed to resolve this difficulty in order to prove the local stabilizability of the system. A NMPC controller was developed. A stabilization term for the counterbalance valve spool was incorporated in the cost function. Terminal cost and constraints were designed by using CLF level set in order to ensure the local asymptotic stability of the controller. The proposed method reduced oscillation amplitude by an average of 88.19% under a 240 kg terminal load while maintaining the same level of trajectory tracking error compared with traditional feedforward-feedback control in experiments. The proposed method achieves high tracking accuracy while ensuring stability.
|
|
Received: 03 July 2024
Published: 28 July 2025
|
|
|
| Fund: 国家自然科学基金资助项目(52075320). |
|
Corresponding Authors:
Jianfeng TAO
E-mail: v7sjtu@sjtu.edu.cn;jftao@sjtu.edu.cn
|
含平衡阀阀控缸的非线性模型预测轨迹跟踪
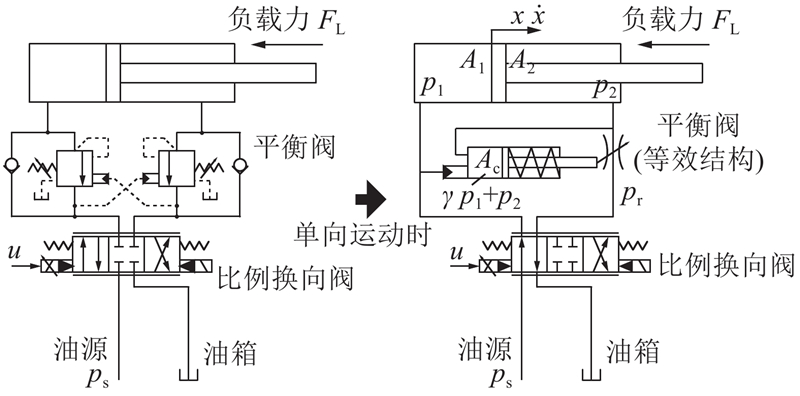
为了解决含平衡阀阀控缸系统轨迹跟踪控制易失稳振荡的问题,提出非线性模型预测控制(NMPC)的轨迹跟踪方法. 基于含平衡阀阀控缸系统的微分-代数方程模型,通过方程变换与合理简化,构建仿射非线性状态空间模型. 通过部分反馈线性化分析该模型,分离出系统的零动态,揭示了含平衡阀系统难以全局镇定的根源,即零动态稳定性条件不易解析获取. 为了解决该难题,构造局部控制Lyapunov函数(CLF),证明系统具有局部可镇定性. 提出NMPC控制器,在优化代价函数中增加平衡阀阀芯镇定项,利用CLF水平集设计终端代价与终端不等约束,保证NMPC的局部渐近稳定性. 与传统的模型前馈-反馈控制进行实验对比,在同等的轨迹跟踪误差水平下,提出方法在240 kg末端负载下的振动振幅平均下降88.19%,证明利用提出方法,可以在保证稳定性的基础上具有较高的轨迹跟踪精度.
关键词:
平衡阀,
阀控液压缸,
非线性模型预测控制,
轨迹跟踪,
振动抑制
|
|
| [1] |
张海平. 液压平衡阀应用技术 [M]. 北京: 机械工业出版社, 2017: 50−113.
|
|
|
| [2] |
YAO Y, ZHOU H, CHEN Y, et al. Stability analysis of a pilot operated counterbalance valve for a big flow rate [C]// ASME/BATH 2014 Symposium on Fluid Power and Motion Control. Bath: ASME, 2014: V001T01A005.
|
|
|
| [3] |
SREEHARSHA R, BHOLA M, KUMAR N, et al. Energy saving analysis using pilot operated counter balance valve [M]//Advances in engineering design. Singapore: Springer, 2019: 279–287.
|
|
|
| [4] |
JENSEN K J, EBBESEN M K, HANSEN M R Adaptive feedforward control of a pressure compensated differential cylinder[J]. Applied Sciences, 2020, 10 (21): 7847
doi: 10.3390/app10217847
|
|
|
| [5] |
KOZLOV L, POLISHCHUK L, PIONTKEVYCH O, et al Experimental research characteristics of counterbalance valve for hydraulic drive control system of mobile machine[J]. Przegląd Elektrotechniczny, 2019, 1 (4): 106- 111
doi: 10.15199/48.2019.04.18
|
|
|
| [6] |
SCIANCALEPORE A, VACCA A, PENA O, et al. Lumped parameter modeling of counterbalance valves considering the effect of flow forces [C]// ASME/BATH 2019 Symposium on Fluid Power and Motion Control. Longboat Key: ASME, 2019: V001T01A022.
|
|
|
| [7] |
RITURAJ R, SCHEIDL R Towards digital twin development of counterbalance valves: modelling and experimental investigation[J]. Mechanical Systems and Signal Processing, 2023, 188: 110049
doi: 10.1016/j.ymssp.2022.110049
|
|
|
| [8] |
SUN H, TAO J, QIN C, et al Optimal energy consumption and response capability assessment for hydraulic servo systems containing counterbalance valves[J]. Journal of Mechanical Design, 2023, 145 (5): 053501
doi: 10.1115/1.4056497
|
|
|
| [9] |
NORDHAMMER P, BAK M, HANSEN M. Controlling the slewing motion of hydraulically actuated cranes using sequential activation of counterbalance valves [C]// 12th International Conference on Control, Automation and Systems. Jeju: IEEE, 2012: 773-778.
|
|
|
| [10] |
NORDHAMMER P, BAK M, HANSEN M. A method for reliable motion control of pressure compensated hydraulic actuation with counterbalance valves [C]// 12th International Conference on Control, Automation and Systems. Jeju: IEEE, 2012: 759-763.
|
|
|
| [11] |
RITELLI G F, VACCA A Energetic and dynamic impact of counterbalance valves in fluid power machines[J]. Energy Conversion and Management, 2013, 76: 701- 711
doi: 10.1016/j.enconman.2013.08.021
|
|
|
| [12] |
SØRENSEN J K, HANSEN M R, EBBESEN M K Novel concept for stabilising a hydraulic circuit containing counterbalance valve and pressure compensated flow supply[J]. International Journal of Fluid Power, 2016, 17 (3): 153- 162
doi: 10.1080/14399776.2016.1172446
|
|
|
| [13] |
SUN H, TAO J, QIN C, et al Dynamics modeling and bifurcation analysis for valve-controlled hydraulic cylinder system containing counterbalance valves[J]. Journal of Vibration Engineering and Technologies, 2021, 9 (8): 1941- 1957
doi: 10.1007/s42417-021-00342-6
|
|
|
| [14] |
ŁOPATKA M J, KROGUL P, RUBIEC A, et al Preliminary experimental research on the influence of counterbalance valves on the operation of a heavy hydraulic manipulator during long-range straight-line movement[J]. Energies, 2022, 15 (15): 5596
doi: 10.3390/en15155596
|
|
|
| [15] |
CRISTOFORI D, VACCA A, ARIYUR K A novel pressure-feedback based adaptive control method to damp instabilities in hydraulic machines[J]. SAE International Journal of Commercial Vehicles, 2012, 5 (2): 586- 596
doi: 10.4271/2012-01-2035
|
|
|
| [16] |
KJELLAND M B, HANSEN M R Using input shaping and pressure feedback to suppress oscillations in slewing motion of lightweight flexible hydraulic crane[J]. International Journal of Fluid Power, 2015, 16 (3): 141- 148
doi: 10.1080/14399776.2015.1089071
|
|
|
| [17] |
JOSE J T, DAS J, MISHRA S Kr Dynamic improvement of hydraulic excavator using pressure feedback and gain scheduled model predictive control[J]. IEEE Sensors Journal, 2021, 21 (17): 18526- 18534
doi: 10.1109/JSEN.2021.3083677
|
|
|
| [18] |
JIA R, ZHANG J, DING R, et al Active damping control of the large-scale flexible hydraulic manipulators with independent metering system[J]. International Journal of Fluid Power, 2024, 25 (2): 163- 182
|
|
|
| [19] |
ISIDORI A The zero dynamics of a nonlinear system: from the origin to the latest progresses of a long successful story[J]. European Journal of Control, 2013, 19 (5): 369- 378
doi: 10.1016/j.ejcon.2013.05.014
|
|
|
| [20] |
ISIDORI A. Elementary theory of nonlinear feedback for single-input single-output systems [M]// Nonlinear control systems. London: Springer, 1995: 137–217.
|
|
|
| [21] |
MAYNE D Q, RAWLINGS J B, RAO C V, et al Constrained model predictive control: stability and optimality[J]. Automatica, 2000, 36 (6): 789- 814
doi: 10.1016/S0005-1098(99)00214-9
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|