| 计算机与控制工程 |
|

|
|
|
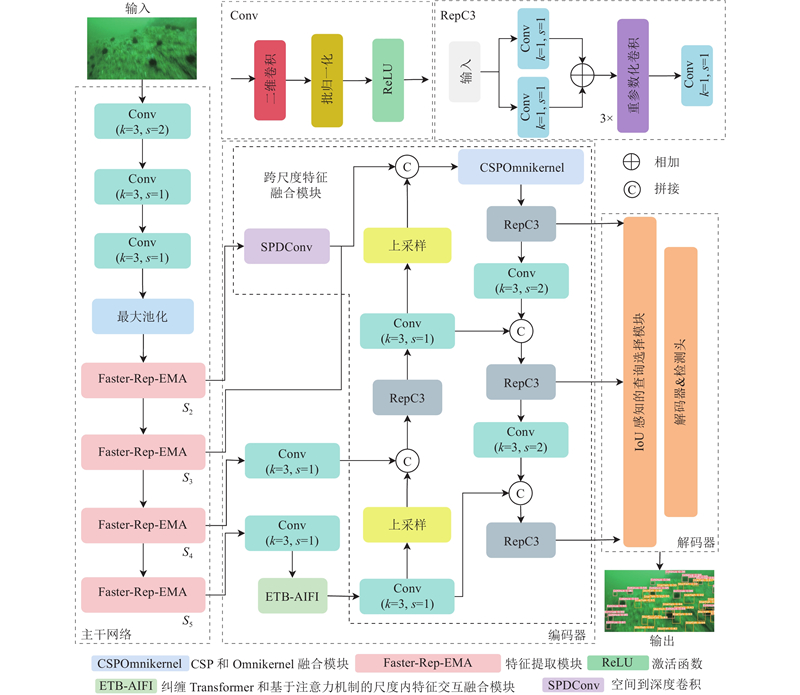
| 基于改进RT-DETR的水下色偏环境中小型生物检测 |
董绍江( ),肖涛,吕振鸣,夏浩然,罗家元,孙世政,张霞,刘超 ),肖涛,吕振鸣,夏浩然,罗家元,孙世政,张霞,刘超 |
| 重庆交通大学 机电与车辆工程学院,重庆 400074 |
|
| Small organism detection in underwater color-cast environments based on improved RT-DETR |
| Shaojiang DONG(),Tao XIAO,Zhenming LV,Haoran XIA,Jiayuan LUO,Shizheng SUN,Xia ZHANG,Chao LIU |
| School of Mechatronics and Vehicle Engineering, Chongqing Jiaotong University, Chongqing 400074, China |
引用本文:
董绍江,肖涛,吕振鸣,夏浩然,罗家元,孙世政,张霞,刘超. 基于改进RT-DETR的水下色偏环境中小型生物检测[J]. 浙江大学学报(工学版), 2026, 60(7): 1404-1415.
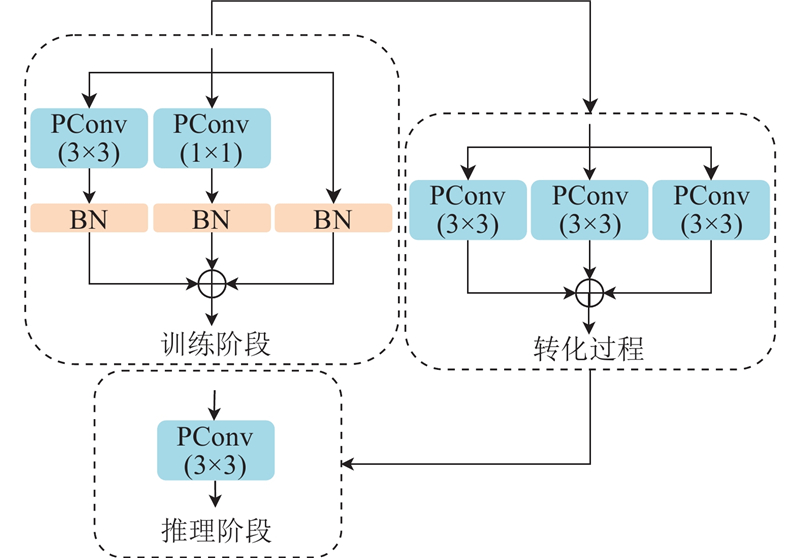
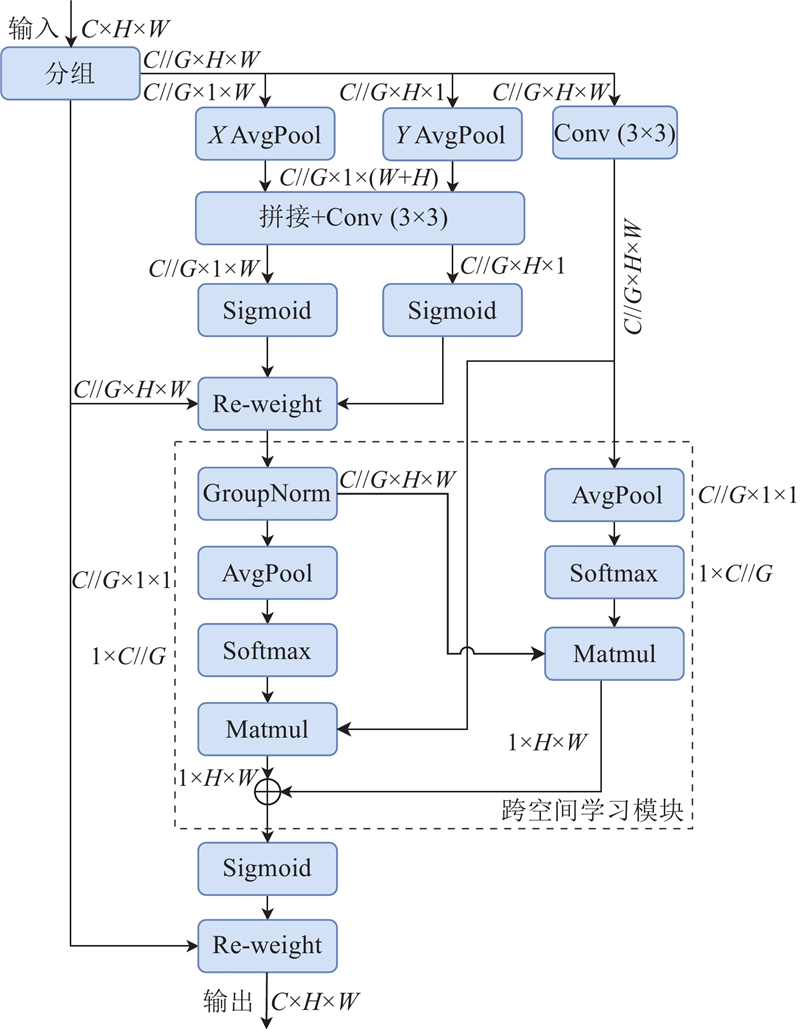
Shaojiang DONG,Tao XIAO,Zhenming LV,Haoran XIA,Jiayuan LUO,Shizheng SUN,Xia ZHANG,Chao LIU. Small organism detection in underwater color-cast environments based on improved RT-DETR. Journal of ZheJiang University (Engineering Science), 2026, 60(7): 1404-1415.
链接本文:
https://www.zjujournals.com/eng/CN/10.3785/j.issn.1008-973X.2026.07.004
或
https://www.zjujournals.com/eng/CN/Y2026/V60/I7/1404
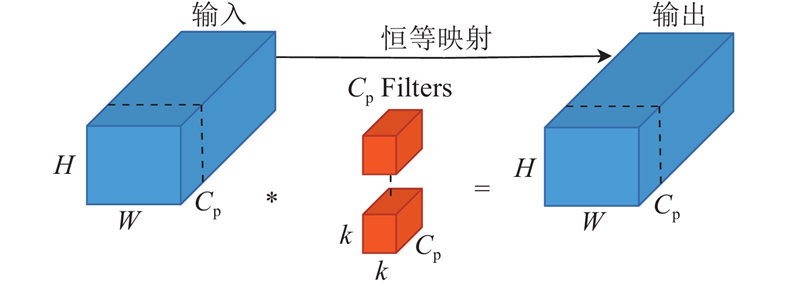
|
| 1 |
ELMEZAIN M, SAAD SAOUD L, SULTAN A, et al Advancing underwater vision: a survey of deep learning models for underwater object recognition and tracking[J]. IEEE Access, 2025, 13: 17830- 17867
doi: 10.1109/ACCESS.2025.3534098
|
| 2 |
SHI P, XU X, NI J, et al Underwater biological detection algorithm based on improved faster-RCNN[J]. Water, 2021, 13 (17): 2420
doi: 10.3390/w13172420
|
| 3 |
张艳, 孙晶雪, 孙叶美, 等 基于分割注意力与线性变换的轻量化目标检测[J]. 浙江大学学报: 工学版, 2023, 57 (6): 1195- 1204
ZHANG Yan, SUN Jingxue, SUN Yemei, et al Lightweight object detection based on split attention and linear transformation[J]. Journal of Zhejiang University: Engineering Science, 2023, 57 (6): 1195- 1204
doi: 10.3785/j.issn.1008-973X.2023.06.015
|
| 4 |
闵锋, 张雨薇, 刘煜晖, 等 改进YOLOv8的轻量化水下生物检测模型[J]. 计算机工程与应用, 2025, 61 (6): 96- 105
MIN Feng, ZHANG Yuwei, LIU Yuhui, et al Improving lightweight underwater biological detection model of YOLOv8[J]. Computer Engineering and Applications, 2025, 61 (6): 96- 105
doi: 10.3778/j.issn.1002-8331.2408-0411
|
| 5 |
GUO L, LIU X, YE D, et al Underwater object detection algorithm integrating image enhancement and deformable convolution[J]. Ecological Informatics, 2025, 89: 103185
doi: 10.1016/j.ecoinf.2025.103185
|
| 6 |
ZHOU H, KONG M, YUAN H, et al Real-time underwater object detection technology for complex underwater environments based on deep learning[J]. Ecological Informatics, 2024, 82: 102680
doi: 10.1016/j.ecoinf.2024.102680
|
| 7 |
ZHANG W, WANG H, LI H, et al Dual-stream feature pyramid network with task interaction for underwater object detection[J]. Digital Signal Processing, 2025, 163: 105199
doi: 10.1016/j.dsp.2025.105199
|
| 8 |
CARION N, MASSA F, SYNNAEVE G, et al. End-to-end object detection with Transformers [C]// European Conference on Computer Vision. [S. l. ]: Springer, 2020: 213–229.
|
| 9 |
ZHU X, SU W, LU L, et al. Deformable DETR: deformable Transformers for end-to-end object detection [EB/OL]. (2020-07-09) [2025-06-01]. https://arxiv.org/abs/2010.04159.
|
| 10 |
ZHANG H, LI F, LIU S, et al. DINO: DETR with improved denoising anchor boxes for end-to-end object detection [EB/OL]. (2022-03-07) [2025-06-01]. https://arxiv.org/abs/2203.03605.
|
| 11 |
ZHAO Y, LV W, XU S, et al. DETRs beat YOLOs on real-time object detection [C]// Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. Seattle: IEEE, 2024: 16965–16974.
|
| 12 |
JAMIESON S, HOW J P, GIRDHAR Y. DeepSeeColor: realtime adaptive color correction for autonomous underwater vehicles via deep learning methods [C]// Proceedings of the IEEE International Conference on Robotics and Automation. London: IEEE, 2023: 3095–3101.
|
| 13 |
吕振鸣, 董绍江, 夏宗佑, 等 基于改进CycleGAN的多失真类型水下图像增强[J]. 浙江大学学报: 工学版, 2025, 59 (6): 1148- 1158
LV Zhenming, DONG Shaojiang, XIA Zongyou, et al Multi-distortion type underwater image enhancement based on improved CycleGAN[J]. Journal of Zhejiang University: Engineering Science, 2025, 59 (6): 1148- 1158
|
| 14 |
CHEN J, KAO S H, HE H, et al. Run, don’t walk: chasing higher FLOPS for faster neural networks [C]// Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. Vancouver: IEEE, 2023: 12021–12031.
|
| 15 |
OUYANG D, HE S, ZHANG G, et al. Efficient multi-scale attention module with cross-spatial learning [C]// Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing. Rhodes Island: IEEE, 2023: 1–5.
|
| 16 |
BERMAN D, LEVY D, AVIDAN S, et al Underwater single image color restoration using haze-lines and a new quantitative dataset[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2021, 43 (8): 2822- 2837
doi: 10.1109/tpami.2020.2977624
|
| 17 |
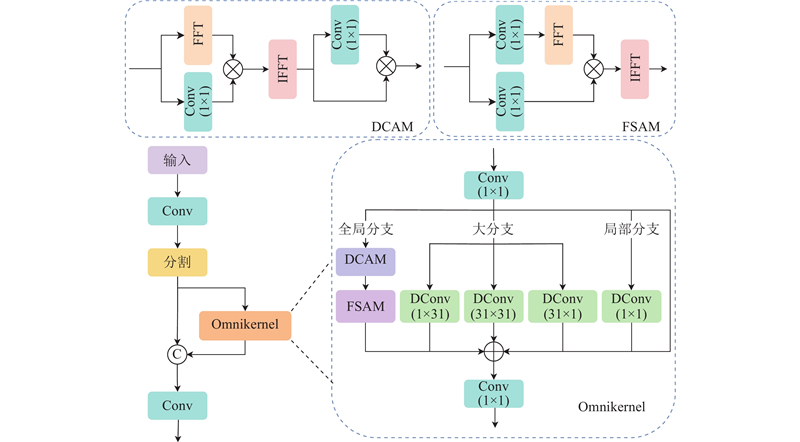
SUN Y, XU C, YANG J, et al. Frequency-spatial entanglement learning for camouflaged object detection [C]// European Conference on Computer Vision. Milan: Springer, 2024: 343–360.
|
| 18 |
KHALILI B, SMYTH A W SOD-YOLOv8: enhancing YOLOv8 for small object detection in aerial imagery and traffic scenes[J]. Sensors, 2024, 24 (19): 6209
|
| 19 |
SUNKARA R, LUO T. No more strided convolutions or pooling: a new CNN building block for low-resolution images and small objects [C]// Machine Learning and Knowledge Discovery in Databases. Grenoble: Springer, 2023: 443–459.
|
| 20 |
CUI Y, REN W, KNOLL A Omni-kernel modulation for universal image restoration[J]. IEEE Transactions on Circuits and Systems for Video Technology, 2024, 34 (12): 12496- 12509
doi: 10.1109/TCSVT.2024.3429557
|
| 21 |
LIU C, LI H, WANG S, et al. A dataset and benchmark of underwater object detection for robot picking [C]// Proceedings of the IEEE International Conference on Multimedia & Expo Workshops. Shenzhen: IEEE, 2021: 1–6.
|
| 22 |
WANG C Y, YEH I H, LIAO H Y M. YOLOv9: learning what you want to learn using programmable gradient information [C]// European Conference on Computer Vision. Milan: Springer, 2024: 1–21.
|
| 23 |
WANG A, CHEN H, LIU L, et al. YOLOv10: real-time end-to-end object detection [EB/OL]. (2024-05-13) [2025-06-06]. https://arxiv.org/abs/2405.14458.
|
| 24 |
KHANAM R, HUSSAIN M. YOLOv11: an overview of the key architectural enhancements [EB/OL]. (2024-10-09) [2025-06-06]. https://arxiv.org/abs/2410.17725.
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|