| 计算机技术、控制工程、通信技术 |
|

|
|
|
| 改进YOLOv8s的轻量级无人机航拍小目标检测算法 |
翟亚红( ),陈雅玲,徐龙艳*(),龚玉 ),陈雅玲,徐龙艳*(),龚玉 |
| 湖北汽车工业学院 电气与信息工程学院,湖北 十堰 442002 |
|
| Improved YOLOv8s lightweight small target detection algorithm of UAV aerial image |
| Yahong ZHAI(),Yaling CHEN,Longyan XU*(),Yu GONG |
| School of Electrical and Information Engineering, Hubei University of Automotive Technology, Shiyan 442002, China |
引用本文:
翟亚红,陈雅玲,徐龙艳,龚玉. 改进YOLOv8s的轻量级无人机航拍小目标检测算法[J]. 浙江大学学报(工学版), 2025, 59(8): 1708-1717.
Yahong ZHAI,Yaling CHEN,Longyan XU,Yu GONG. Improved YOLOv8s lightweight small target detection algorithm of UAV aerial image. Journal of ZheJiang University (Engineering Science), 2025, 59(8): 1708-1717.
链接本文:
https://www.zjujournals.com/eng/CN/10.3785/j.issn.1008-973X.2025.08.018
或
https://www.zjujournals.com/eng/CN/Y2025/V59/I8/1708
|
| 1 |
ZRELLI I, REJEB A, ABUSULAIMAN R, et al Drone applications in logistics and supply chain management: a systematic review using latent Dirichlet allocation[J]. Arabian Journal for Science and Engineering, 2024, 49 (9): 12411- 12430
doi: 10.1007/s13369-023-08681-0
|
| 2 |
奉志强, 谢志军, 包正伟, 等 基于改进YOLOv5的无人机实时密集小目标检测算法[J]. 航空学报, 2023, 44 (7): 251- 265
FENG Zhiqiang, XIE Zhijun, BAO Zhengwei, et al Real-time dense small object detection algorithm for UAV based on improved YOLOv5[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44 (7): 251- 265
|
| 3 |
WANG C Y, BOCHKOVSKIY A, LIAO H Y M. YOLOv7: trainable bag-of-freebies sets new state-of-the-art for real-time object detectors [C]// Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. Vancouver: IEEE, 2023: 7464-7475.
|
| 4 |
ZHU X K, LYU S C, WANG X, et al. TPH-YOLOv5: improved YOLOv5 based on transformer prediction head for object detection on drone-captured scenarios [C]// Proceedings of the IEEE/CVF International Conference on Computer Vision Workshops. Montreal: IEEE, 2021: 2778-2788.
|
| 5 |
WANG G, CHEN Y F, AN P, et al UAV-YOLOv8: a small-object-detection model based on improved YOLOv8 for UAV aerial photography scenarios[J]. Sensors, 2023, 23 (16): 7190
doi: 10.3390/s23167190
|
| 6 |
LI Y T, FAN Q S, HUANG H S, et al A modified YOLOv8 detection network for UAV aerial image recognition[J]. Drones, 2023, 7 (5): 304
doi: 10.3390/drones7050304
|
| 7 |
SHAO Y F, YANG Z X, LI Z H, et al Aero-YOLO: an efficient vehicle and pedestrian detection algorithm based on unmanned aerial imagery[J]. Electronics, 2024, 13 (7): 1190
doi: 10.3390/electronics13071190
|
| 8 |
XU L Y, ZHAO Y F, ZHAI Y H, et al Small object detection in UAV images based on YOLOv8n[J]. International Journal of Computational Intelligence Systems, 2024, 17 (1): 1- 9
doi: 10.1007/s44196-023-00380-w
|
| 9 |
SUI J C, CHEN D K, ZHENG X, et al A new algorithm for small target detection from the perspective of unmanned aerial vehicles[J]. IEEE Access, 2024, 12 (99): 29690- 29697
|
| 10 |
刘树东, 刘业辉, 孙叶美, 等 基于倒置残差注意力的无人机航拍图像小目标检测[J]. 北京航空航天大学学报, 2023, 49 (3): 514- 524
LIU Shudong, LIU Yehui, SUN Yemei, et al Small object detection in UAV aerial images based on inverted residual attention[J]. Journal of Beijing University of Aeronautics and Astronautics, 2023, 49 (3): 514- 524
|
| 11 |
潘玮, 韦超, 钱春雨, 等 面向无人机视角下小目标检测的YOLOv8s改进模型[J]. 计算机工程与应用, 2024, 60 (9): 142- 150
PAN Wei, WEI Chao, QIAN Chunyu, et al Improved YOLOv8s model for small object detection from perspective of drones[J]. Computer Engineering and Applications, 2024, 60 (9): 142- 150
doi: 10.3778/j.issn.1002-8331.2312-0043
|
| 12 |
邓天民, 程鑫鑫, 刘金凤, 等 基于特征复用机制的航拍图像小目标检测算法[J]. 浙江大学学报: 工学版, 2024, 58 (3): 437- 448
DENG Tianming, CHENG Xinxin, LIU Jinfeng, et al Small target detection algorithm for aerial images based on feature reuse mechanism[J]. Journal of Zhejiang University: Engineering Science, 2024, 58 (3): 437- 448
|
| 13 |
LIU S, QI L, QIN H F. et al. Path aggregation network for instance segmentation [C]// Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. Salt Lake City: IEEE, 2018: 8759-8768.
|
| 14 |
LIN T Y, DOLLAR P, CIRSHICK R, et al. Feature pyramid networks for object detection [C]// Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. Honolulu: IEEE, 2017: 936-944.
|
| 15 |
DING X H, ZHANG X Y, MA N N, et al. Repvgg: making VGG-style convnets great again [C]// Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. Nashville: IEEE, 2021: 13733-13742.
|
| 16 |
MISRA D, NALAMADA T, ARASANIPALAI A U, et al. Rotate to attend: convolutional triplet attention module [C]// Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision. Waikoloa: IEEE, 2021: 3138-3147.
|
| 17 |
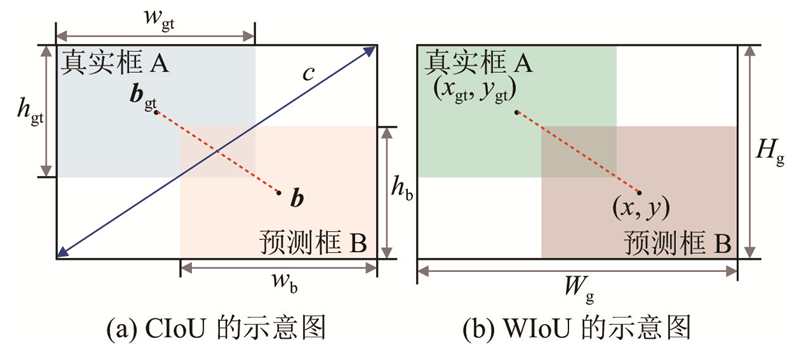
TONG Z J, CHEN Y H, XU Z W, et al. Wise-IoU: bounding box regression loss with dynamic focusing mechanism [EB/OL]. (2023-04-08) [2024-07-13]. https://arxiv.org/pdf/2301.10051.
|
| 18 |
DU D, ZHU P F, WEN L Y, et al. VisDrone-DET2019: the vision meets drone object detection in image challenge results [C]// Proceedings of the IEEE/CVF International Conference on Computer Vision Workshops. Seoul: IEEE, 2019: 213-226.
|
| 19 |
YU W P, YANG T, CHEN C. Towards resolving the challenge of long-tail distribution in UAV images for object detection [C]// Proceedings of the IEEE Winter Conference on Applications of Computer Vision. Waikoloa: IEEE, 2021: 3258-3267.
|
| 20 |
ZHAO H P, ZHOU Y, ZHANG L, et al Mixed YOLOv3-LITE: a lightweight real-time object detection method[J]. Sensors, 2020, 20 (7): 1861
doi: 10.3390/s20071861
|
| 21 |
杨永刚, 谢睿夫, 龚泽川 改进YOLOv7-tiny的无人机目标检测算法[J]. 计算机工程与应用, 2024, 60 (6): 121- 129
YANG Yonggang, XIE Ruifu, GONG Zechuan Improved YOLOv7-tiny UAV target detection algorithm[J]. Computer Engineering and Applications, 2024, 60 (6): 121- 129
doi: 10.3778/j.issn.1002-8331.2307-0316
|
| 22 |
冯迎宾, 郭枭尊, 晏佳华. 基于多尺度注意力机制的无人机小目标检测算法[EB/OL]. (2024-08-02)[2024-08-11]. http://www.co-journal.com/CN/10.12382/bgxb.2023.1124.
FENG Yingbin, GUO Xiaozun, YAN Jiahua. UVA small target detection algorithm based on multi-scale attention mechanism [EB/OL]. (2024-08-02)[2024-08-11]. http://www.co-journal.com/ CN/10.12382/bgxb.2023.1124.
|
| 23 |
TAHIR N U A, LONG Z, ZHANG Z, et al PVswin-YOLOv8s: UAV-based pedestrian and vehicle detection for traffic management in smart cities using improved YOLOv8[J]. Drones, 2024, 8 (3): 84
doi: 10.3390/drones8030084
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|