| 土木工程、交通工程 |
|

|
|
|
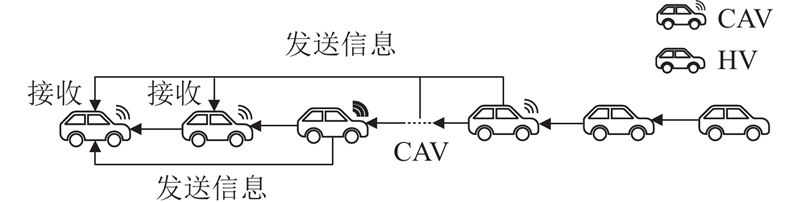
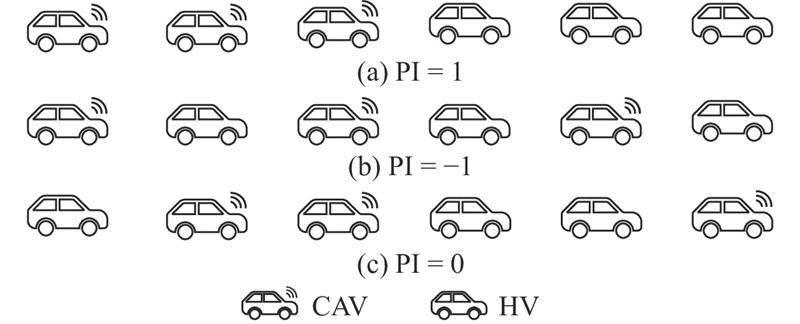
| 考虑多前车信息反馈的CAV混合交通流特性 |
路庆昌( ),孟旭,刘丽萍,任永全,王世鑫 ),孟旭,刘丽萍,任永全,王世鑫 |
| 长安大学 电子与控制工程学院,陕西 西安 710064 |
|
| CAV mixed traffic flow characteristics considering feedback from multiple preceding vehicles |
| Qingchang LU(),Xu MENG,Liping LIU,Yongquan REN,Shixin WANG |
| School of Electronics and Control Engineering, Chang’an University, Xi’an 710064, China |
引用本文:
路庆昌,孟旭,刘丽萍,任永全,王世鑫. 考虑多前车信息反馈的CAV混合交通流特性[J]. 浙江大学学报(工学版), 2025, 59(8): 1767-1774.
Qingchang LU,Xu MENG,Liping LIU,Yongquan REN,Shixin WANG. CAV mixed traffic flow characteristics considering feedback from multiple preceding vehicles. Journal of ZheJiang University (Engineering Science), 2025, 59(8): 1767-1774.
链接本文:
https://www.zjujournals.com/eng/CN/10.3785/j.issn.1008-973X.2025.08.024
或
https://www.zjujournals.com/eng/CN/Y2025/V59/I8/1767
|
| 1 |
BANSAL P, KOCKELMAN K M Forecasting Americans’ long-term adoption of connected and autonomous vehicle technologies[J]. Transportation Research Part A: Policy and Practice, 2017, 95: 49- 63
doi: 10.1016/j.tra.2016.10.013
|
| 2 |
路庆昌, 秦汉, 刘鹏, 等 基于MFD的快速路新型混合交通流特性分析[J]. 东南大学学报: 自然科学版, 2023, 53 (5): 905- 914
LU Qingchang, QIN Han, LIU Peng, et al Characteristic analysis on MFD-based new mixed traffic flow on expressways[J]. Journal of Southeast University: Natural Science Edition, 2023, 53 (5): 905- 914
|
| 3 |
秦严严, 王昊, 冉斌 CACC 车辆跟驰建模及混合交通流分析[J]. 交通运输系统工程与信息, 2018, 18 (2): 60- 65
QIN Yanyan, WANG Hao, RAN Bin Vehicle following modeling and mixed traffic flow analysis with CACC[J]. Journal of Transportation Systems Engineering and Information Technology, 2018, 18 (2): 60- 65
|
| 4 |
宋成举 协同自适应巡航控制车辆跟驰模型优化及仿真分析[J]. 武汉理工大学学报: 交通科学与工程版, 2021, 45 (6): 1029- 1033
SONG Chengju Optimization and simulation analysis of vehicle following model for collaborative adaptive cruise control[J]. Journal of Wuhan University of Technology: Traffic Science and Engineering Edition, 2021, 45 (6): 1029- 1033
|
| 5 |
LI R, SUN S, WU Y, et al Fundamental diagram of mixed traffic flow considering time lags, platooning intensity, and the degradation of connected automated vehicles[J]. Physica A: Statistical Mechanics and its Applications, 2023, 627: 129130
doi: 10.1016/j.physa.2023.129130
|
| 6 |
宋慧, 曲大义, 王少杰, 等 考虑多车响应的网联混行车流跟驰模型及稳态分析[J]. 吉林大学学报: 工学版, 2024, 54 (11): 3220- 3230
SONG Hui, QU Dayi, WANG Shaojie, et al Connected mixed traffic flow car-following model and stability analysis considering multiple vehicles response[J]. Journal of Jilin University: Engineering and Technology Edition, 2024, 54 (11): 3220- 3230
|
| 7 |
孙启鹏, 武智刚, 曹宁博, 等 基于风险预测的自动驾驶车辆行为决策模型[J]. 浙江大学学报: 工学版, 2022, 56 (9): 1761- 1771
SUN Qipeng, WU Zhigang, CAO Ningbo, et al Decision-making model of autonomous vehicle behavior based on risk prediction[J]. Journal of Zhejiang University: Engineering Science, 2022, 56 (9): 1761- 1771
|
| 8 |
WANG S Y, YU B, WU M Y MVCM car-following model for connected vehicles and simulation-based traffic analysis in mixed traffic flow[J]. IEEE Transactions on Intelligent Transportation Systems, 2021, 23 (6): 5267- 5274
|
| 9 |
XIE D F, ZHAO X M, HE Z B Heterogeneous traffic mixing regular and connected vehicles: modeling and stabilization[J]. IEEE Transactions on Intelligent Transportation Systems, 2019, 20 (6): 2060- 2071
doi: 10.1109/TITS.2018.2857465
|
| 10 |
ZONG F, WANG M, TANG M, et al An improved intelligent driver model considering the information of multiple front and rear vehicles[J]. IEEE Access, 2021, 9: 66241- 66252
doi: 10.1109/ACCESS.2021.3072058
|
| 11 |
GHIASI A, HUSSAIN O, QIAN Z S, et al A mixed traffic capacity analysis and lane management model for connected automated vehicles: a Markov chain method[J]. Transportation Research Part B: Methodological, 2017, 106: 266- 292
doi: 10.1016/j.trb.2017.09.022
|
| 12 |
YAO Z, WU Y, WANG Y, et al Analysis of the impact of maximum platoon size of CAVs on mixed traffic flow: an analytical and simulation method[J]. Transportation Research Part C: Emerging Technologies, 2023, 147: 103989
doi: 10.1016/j.trc.2022.103989
|
| 13 |
ZHOU J, ZHU F Analytical analysis of the effect of maximum platoon size of connected and automated vehicles[J]. Transportation Research Part C: Emerging Technologies, 2021, 122: 102882
doi: 10.1016/j.trc.2020.102882
|
| 14 |
JIANG Y S, ZHU F Y, GU Q F, et al Influence of CAVs platoon characteristics on fundamental diagram of mixed traffic flow[J]. Physica A: Statistical Mechanics and its Applications, 2023, 624: 128906
doi: 10.1016/j.physa.2023.128906
|
| 15 |
曹宁博, 陈家辉, 赵利英 智能网联车和人驾车辆混合交通流排队长度估计模型[J]. 浙江大学学报: 工学版, 2024, 58 (9): 1935- 1944
CAO Ningbo, CHEN Jiahui, ZHAO Liying Queue length estimation model for mixed traffic flow of intelligent connected vehicles and human-driven vehicles[J]. Journal of Zhejiang University: Engineering Science, 2024, 58 (9): 1935- 1944
|
| 16 |
PLOEG J, SEMSAR-KAZEROONI E, LIJSTER G, et al Graceful degradation of cooperative adaptive cruise control[J]. IEEE Transactions on Intelligent Transportation Systems, 2015, 16 (1): 488- 497
doi: 10.1109/TITS.2014.2349498
|
| 17 |
CI Y, WU H, SUN Y, et al A prediction model with wavelet neural network optimized by the chicken swarm optimization for on-ramps metering of the urban expressway[J]. Journal of Intelligent Transportation Systems, 2022, 26 (3): 356- 365
doi: 10.1080/15472450.2021.1890070
|
| 18 |
TREIBER M, HENNECKE A, HELBING D Congested traffic states in empirical observations and microscopic simulations[J]. Physical Review E, 2000, 62 (2): 1805- 1824
doi: 10.1103/PhysRevE.62.1805
|
| 19 |
WARD J A. Heterogeneity, lane-changing and instability in traffic: a mathematical approach [D]. Bristol: University of Bristol, 2009.
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|