


由于换流站阀厅结构的复杂性和运行环境的特殊性,目前国内针对相关机器人的研究主要集中在以下2个方面。一类聚焦于阀厅设备运行状态的监测与智能巡检。例如:王宏伟等[4]提出了一种变电站巡检机器人自主生成巡检点的方法;连兴文等[5]设计了一种阀厅智能巡检机器人的专用运动控制系统,以提升其控制策略的灵活性和运动精度;叶日新等[6]利用红外测温技术对阀厅设备进行缺陷诊断与处理,实现了设备温度的实时精准监测。另一类聚焦于阀厅内壁的清扫和维护。例如:温祥青[7]基于差速履带式结构,设计了集攀爬吸附、路径控制与壁面清洁于一体的爬壁机器人,其控制系统采用STM32嵌入式架构与图像识别算法,可实现壁面清洁度判别及远程控制功能。焦义康等[8]针对换流站阀厅的特殊工况,开发了一种具备壁面行驶、越障及除尘功能的双节式爬壁机器人。
考虑到换流站阀厅顶部钢结构的复杂性,清扫机器人在结构和功能方面需兼顾通过性、适应性、安全性和清扫效率,这对机器人本体结构的创新设计提出了较高的要求。Klemm等[9]设计的轮足式机器人以其独特的机械结构设计和控制架构,为复杂环境下移动机器人的研发提供了参考。Muthugala等[10]提出了“设计由机器人驱动(design by robot)”的创新理念,有效提升了清扫机器人的作业效率。近年来,国内众多学者针对复杂环境下的爬壁机器人[11-13]、适用于非平整地形的仿生搜救机器人[14]、仿青蛙游动机器人[15]、多臂协作机器人[16]以及水下检测机器人[17-18]的创新设计展开了深入研究。上述研究成果可为阀厅钢结构清扫机器人的设计提供重要参考。
基于此,本文将结合公理设计理论开展阀厅钢结构清扫机器人设计。首先,基于独立公理构建机器人的功能—结构设计矩阵,并利用信息公理对设计方案进行评价与优化,以确定最优设计方案。然后,对机器人的关键部件进行可靠性分析与轻量化设计,并根据实际应用场景对其越障、转向运动姿态以及智能控制系统进行设计。最后,在阀厅顶部对机器人样机进行性能测试,并分析其可靠性、运动性能、越障能力、转向能力及清扫效率,以验证设计方案的可行性。
1 清扫机器人总体结构设计
清扫机器人在阀厅顶部复杂钢结构上执行任务时,主要是清除灰尘和施工遗留物,以确保阀厅内部电气设备的无尘化安装与调试。如图1所示,阀厅顶部钢结构位于高空且结构复杂,由多层不同规格和形状的工字钢叠加而成,这对清扫机器人的通过性、适应性、安全性和清扫效率提出了极高要求。为有效应对这些挑战,清扫机器人需具备以下关键功能:
图1

1)夹持能力。机器人能够稳定夹持在钢结构上,且适应不同规格的工字钢。
2)移动能力。机器人能够在复杂钢结构上灵活移动,且具备越障和转向能力,以适应多样结构。
3)清扫能力。机器人的清扫单元能够全面覆盖清洁区域,以确保清洁效果。
4)自主运行能力。机器人能够自动识别清扫场景、判断转向需求和避开障碍物,以实现自主运行。
5)高空运行安全性。通过防跌落、重心控制及防侧翻措施,确保机器人高空作业的安全性。
6)持续运行能力。机器人支持长时间高效运行,以减少停机时间,提高清扫效率。
1.1 基于公理设计的机器人方案设计
公理设计理论为产品和结构的设计方案创新和优化提供了科学的方法,其核心在于指导设计人员在设计过程中做出正确决策。在公理设计中,将设计过程划分为4个域:用户域、功能域、物理域和过程域。其中:用户域描述用户对产品、过程或系统的需求;功能域表示设计方案的功能需求及约束条件;物理域描述设计参数;过程域描述实现这些设计参数的过程变量。公理设计过程涉及4个域的逐层分解、迭代与映射,从功能域到物理域再到过程域,层级以“之”字形展开[20]。在进行功能域到物理域的映射时,先完成同一层次的功能需求与设计参数映射后,再进行下一层次功能需求的分解和映射。独立公理可确保功能需求的独立性,进而提高设计方案的合理性,减少无效方案的产生;信息公理强调设计信息的最小化,通过计算并比较设计方案的信息含量来选择最优方案。
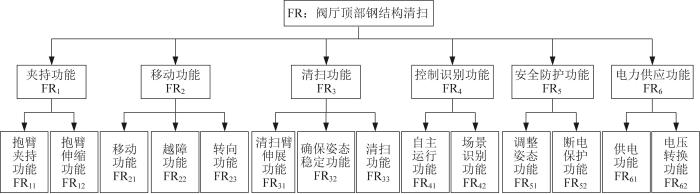
清扫机器人的功能是代替人工登高对阀厅顶部的钢结构进行清扫,以去除阀厅顶部的大颗粒灰尘和施工遗留物。根据公理设计中的“之”字形映射,功能域依靠多个功能需求(functional requirements, FRs)和约束条件(constraints, Cs)进行表达。本文的总功能需求是设计一款可以在阀厅顶部钢结构上进行清扫作业的机器人,约束为阀厅顶部复杂的多规格钢结构(如不同规格的工字钢、钢材与钢材的交叉排列等)。基于“之”字形映射,对总功能需求进行分解,得到相互独立的子功能需求,随后依次映射到物理域,得到对应的设计参数(design parameters, DPs)。
1.1.1 功能需求与设计参数的第1层分解与映射
功能需求是基于公理设计理论逐层分解得到的,核心在于满足独立公理:即每个功能需求的实现需依赖独立的设计参数。本文清扫机器人的功能需求如下。
1)夹持功能(FR1):机器人可以安全、稳定地悬挂在阀厅顶部的钢结构上;2)移动功能(FR2):机器人能够在阀厅顶部的钢结构上精准地移动至指定位置,且能够在钢结构上越障、转向;3)清扫功能(FR3):机器人能够对钢结构上的施工遗留物和灰尘进行清扫;4)控制识别功能(FR4):机器人能够判断是否需要避障或转向,并识别不同的清扫场景,以实现自主运行;5)安全防护功能(FR5):机器人有足够的安全防护措施,以防止在出现故障或意外断电时坠落;6)电力供应功能(FR6):机器人需具有持续工作的能量来源。
为实现机器人的各个功能,建立功能需求与设计参数之间的映射关系。对应的设计参数描述如下:夹持模块(DP1)、移动模块(DP2)、清扫模块(DP3)、控制识别系统(DP4)、安全防护系统(DP5)和电力供应系统(DP6)。
则第1层功能需求与设计参数对应的设计方程可表示为:
式中:X表示FR与DP之间为强影响,0表示FR与DP之间为弱影响。
1.1.2 功能需求与设计参数的第2层分解与映射
清扫机器人结构设计的关键要素主要包括夹持模块(DP1)、移动模块(DP2)和清扫模块(DP3)。其中:DP1用于实现机器人在阀厅顶部钢结构上的可靠夹持;DP2赋予机器人在复杂钢结构上移动、越障和转向的能力;DP3负责实现清扫功能。
1)夹持模块(DP1)。
夹持模块是实现FR1(安全夹紧钢结构) 和FR2(移动、越障、转向) 的基础功能模块。根据独立公理,夹持模块必须在不影响其他功能(如移动、清扫)的前提下,完成夹持任务。为此,设计多抱臂结构,每个抱臂均可独立调节,实现转动和伸缩功能,以适应不同规格的钢结构,增强机器人的灵活性和适应性。
根据“之”字形映射,将FR1分解为2个较低层次的功能需求:FR11——可以夹紧顶部钢结构;FR12——可以伸缩以适应不同钢结构。相应的设计参数选择如下:DP11——抱臂夹持机构;DP12——抱臂伸缩机构。
2)移动模块(DP2)。
移动模块是机器人实现FR2(移动、越障、转向)和FR3(完成清扫任务)的核心模块。根据独立公理,移动模块的各功能(如越障、转向)设计应互相独立,以避免因功能耦合而增加系统复杂度,同时满足信息公理,以减少冗余设计。因此,移动模块的设计采用分体式多单元结构,每个单元均可以灵活地调整移动路径和姿态,以降低系统复杂性,且每个单元可独立承担特定功能。为实现机器人在阀厅顶部钢结构上的平稳移动,设计了轮式移动机构,并结合独立的转向结构来实现精准转向,以确保各个功能的独立性,从而提高机器人对复杂钢结构的适应性。
将FR2分解为3个较低层次的功能需求:FR21——能够进行平稳精准的移动;FR22——可以跨越障碍物,以适应复杂的钢结构;FR23——可以在钢结构上实现转向。相应的设计参数选择如下:DP21——移动机构、DP22——越障机构、DP23——转向机构。
3)清扫模块(DP3)。
清扫模块通过独立的清扫臂和清扫机构来实现FR3(完成清扫任务)。为避免清扫作业对移动和夹持的干扰,确保机器人运动姿态的稳定性,清扫臂采用对称设计形式。
将FR3分解为3个较低层次的功能需求:FR31——能伸展至待清扫区域;FR32——能确保机器人姿态的稳定性;FR33——能进行清扫作业。相应的设计参数选择如下:DP31——清扫臂;DP32——对称放置;DP33——清扫机构。
机器人功能需求与设计参数的第2层分解及对应的设计方程如表1所示。从设计方程可以看出,设计的类型完全符合解耦设计的要求。
表1 功能需求与设计参数的第2层分解及对应的设计方程
Table 1
| 功能需求(FRs) | 设计参数(DPs) | 设计方程 |
|---|---|---|
FR11:可以夹紧顶部钢结构 FR12:可以伸缩以适应不同钢结构 | DP11:抱臂夹持机构 DP12:抱臂伸缩机构 | |
FR21:能够进行平稳精准的移动 FR22:可以跨越障碍物 FR23:可以在钢结构上实现转向 | DP21:移动机构 DP22:越障机构 DP23:转向机构 | |
FR31:能伸展至待清扫区域 FR32:能确保机器人姿态的稳定性 FR33:能进行清扫作业 | DP31:清扫臂 DP32:对称放置 DP33:清扫机构 | |
FR41:能自主运行 FR42:能识别场景信息 | DP41:运动控制处理器 DP42:图像识别处理器 | |
FR51:控制机器人姿态稳定安全 FR52:断电保护 | DP51:安全控制系统 DP52:电机自锁机构 | |
FR61:能持续供电 FR62:能转换不同的电压 | DP61:不间断供电设备 DP62:稳压设备 |
表2 机器人第2层功能需求与设计参数对应的设计矩阵
Table 2
| 功能需求 | 设计参数 | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| DP11 | DP12 | DP41 | DP42 | DP21 | DP22 | DP23 | DP31 | DP32 | DP33 | DP51 | DP52 | DP61 | DP62 | |
| FR11 | X | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| FR12 | 0 | X | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| FR41 | 0 | 0 | X | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| FR42 | 0 | 0 | 0 | X | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| FR21 | X | 0 | 0 | 0 | X | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| FR22 | 0 | X | X | 0 | 0 | X | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| FR23 | X | X | X | 0 | X | 0 | X | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| FR31 | 0 | 0 | X | 0 | 0 | 0 | 0 | X | 0 | 0 | 0 | 0 | 0 | 0 |
| FR32 | 0 | 0 | 0 | X | 0 | 0 | 0 | 0 | X | 0 | 0 | 0 | 0 | 0 |
| FR33 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | X | 0 | X | 0 | 0 | 0 | 0 |
| FR51 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | X | 0 | 0 | 0 |
| FR52 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | X | 0 | 0 |
| FR61 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | X | 0 |
| FR62 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | X |
由表2可知,该设计矩阵为下三角矩阵,满足独立公理的要求。此外,FR2与DP1、DP2、DP4相关联,FR3与DP2、DP3、DP4相关联,故在设计过程中需要特别关注这些关联关系,以确保设计方案的合理性和有效性。
为直观呈现机器人的第1层与第2层功能需求的整体逻辑,绘制对应的功能需求分解图,如图2所示。
图2
1.1.3 功能需求与设计参数的第3层分解与映射
越障功能(FR22)是机器人在钢结构上实现运动的关键,以应对阀厅顶部钢结构上运动路径不连续和工况复杂的特点。因此,需要对FR22进行进一步分解。由于机器人整体难以直接跨越障碍,为保证机器人能够适应阀厅顶部钢结构上的运动路径,采用分节越障模式。这一越障模式通过多个子单元的协同工作,可实现机器人的整体越障功能,且分节结构可有效提高机器人的灵活性。通过改变夹持状态,每个子单元可灵活地调整自身的姿态和运动路径。同时,各子单元还能够协调调整角度和位置,通过协同配合来保证机器人越障运动的顺利进行。
对FR22进行分解:FR221——机器人通过多个子单元协同工作实现越障;FR222——通过转动抱臂实现夹持状态的改变;FR223——每个子单元可以感知自身的姿态,以协同工作。对应的设计参数选择如下:DP221——分体式多单元结构;DP222——抱臂转动机构;DP223——状态感知传感器。
由此可得,对应的设计方程为:
1.1.4 设计方案选择
根据上述设计矩阵,得到多个满足功能需求的阀厅钢结构清扫机器人设计方案。首先,根据独立公理确定以分体式多单元结构、抱臂机构作为机器人移动单元的基础设计方案;然后,通过信息公理对不同设计方案进行分析与优化,确定移动单元的最优设计方案。下文以抱臂伸缩功能(FR12)、多单元协同越障功能(FR221)和清扫臂伸展功能(FR31)为例,详细阐述信息公理在设计方案优化中的具体应用,从而确保设计的高效性与合理性。
对FR12进行功能分解与参数分析:FR121——实现抱臂伸缩运动,推力不小于150 N;FR122——抱臂伸缩范围满足场景需求,抱臂长度可调范围为600~1 200 mm;FR123——控制精度小于2 mm,确保定位准确;FR124——具备闭环长度控制能力,反馈精度小于1 mm。
为实现FR12的各子功能需求,综合考虑实现难度、性能指标与适应性,提出以下3种抱臂伸缩机构设计方案:
1)含编码器的电动推杆方案。采用电动推杆直接推动抱臂,实现伸缩功能。该方案简单易实现,且带编码器的电机容易控制。
2)气压推杆+位移传感器方案。采用气压推杆直接推动抱臂,实现伸缩功能。该方案简单易实现,且气压推杆的推力足够大。
3)关节电机+连杆机构方案。由关节电机驱动连杆机构来实现抱臂伸缩。该方案能够满足更大范围的伸缩需求,且能够提高结构的稳定性。
根据上述约束,可得到不同抱臂伸缩机构设计方案的关键技术指标,如表3所示。
表3 各抱臂伸缩机构设计方案的技术指标
Table 3
| 方案 | 推力/N | 伸缩范围/mm | 反馈精度/mm | 控制精度/mm |
|---|---|---|---|---|
| 1 | 100~500 | 700~1 250 | 0.5~2.5 | 1~5 |
| 2 | 100~1 400 | 650~1 200 | 0.4~1.6 | 1~10 |
| 3 | 100~260 | 500~1 350 | 0.1~1.0 | 0.2~2.0 |
根据独立公理,设计方案信息含量Isys的计算式如下:
式中:Ii 为第i个功能需求对应的信息含量,Pi
对于功能需求FR121,其对应的概率公式为:
式中:x为抱臂伸缩机构的推力;μ为推力均值,μ=150 N;θ为推力标准差,θ=100 N。
对于功能需求FR122、FR123、FR124,相应的可调范围和实现误差均可视作均匀分布,概率公式为:
式中:xmax, i 、xmin, i 分别为对应指标的最大值和最小值。
利用上述公式计算得到各个抱臂伸缩机构设计方案的信息含量,如表4所示。
表4 各抱臂伸缩机构设计方案的信息含量
Table 4
| 方案 | I1 | I2 | I3 | I4 |
|---|---|---|---|---|
| 1 | 0.001 | 0.263 | 2.000 | 2.0 |
| 2 | 0 | 0.126 | 3.170 | 1.0 |
| 3 | 0.457 | 0 | 0 | 0 |
根据信息公理,抱臂伸缩机构(DP12)选择信息含量最小的方案3。关节电机具备快速响应和高精度控制的优点,在遇到障碍或需要转向时,可高效完成抱臂姿态的调整。
多单元协同越障功能(FR221)需要满足以下约束条件:1)跨越距离必须大于障碍物的最大宽度400 mm;2)机器人整体长度必须小于最短的2个障碍物的间距(3 000 mm);3)结构复杂度应适中,自由度数量最好小于10个,以保证设计的可行性和控制效率。
根据上述约束,对分体式多单元结构(DP221)提出了3种设计方案:二单元结构、三单元结构、四单元结构。各分体式多单元结构设计方案的关键技术指标如表5所示。
表5 各分体式多单元结构设计方案的技术指标
Table 5
| 方案 | 跨越距离/mm | 整体长度/mm | 自由度数量 |
|---|---|---|---|
| 1 | 100~200 | 1 200~1 600 | 6~10 |
| 2 | 400~600 | 2 200~2 900 | 9~13 |
| 3 | 1 200~1 800 | 2 800~3 600 | 12~16 |
利用
表6 各分体式多单元结构设计方案的信息含量
Table 6
| 方案 | I1 | I2 | I3 |
|---|---|---|---|
| 1 | 无穷大 | 0 | 0 |
| 2 | 0 | 0 | 0.379 |
| 3 | 0 | 2 | 0.678 |
根据信息公理,分体式多单元结构选择信息含量最小的方案2,即三单元结构。三单元结构在满足跨越距离和整体长度约束的同时,保持了合理的结构复杂度,能够高效完成越障任务并适应复杂工况。
在清扫机器人的设计中,清扫臂伸展至待清扫区域(FR31)是完成清扫任务的关键。为确保清扫效果,FR31需要满足以下条件:1)清扫臂应尽可能覆盖清扫区域;2)减小清扫臂质量,以降低机器人整体负载;3)清扫臂控制系统应保持较低的复杂度;4)清扫臂能适应不同规格工字钢的几何特征(宽度、高度、倾斜角度)。根据上述约束,提出了3种清扫臂自由度设计方案:二自由度、三自由度和四自由度。各清扫臂设计方案的关键技术指标如表7所示。
表7 各清扫臂设计方案的技术指标
Table 7
| 方案 | 覆盖能力 | 轻量化 | 控制复杂度 | 适应能力 |
|---|---|---|---|---|
| 1 | 中 | 高 | 低 | 低 |
| 2 | 高 | 中 | 中 | 中 |
| 3 | 极高 | 低 | 高 | 高 |
表8 各清扫臂设计方案对应的概率
Table 8
| 方案 | P1 | P2 | P3 | P4 |
|---|---|---|---|---|
| 1 | 0.60 | 0.90 | 0.90 | 0.50 |
| 2 | 0.80 | 0.80 | 0.70 | 0.80 |
| 3 | 0.95 | 0.50 | 0.50 | 0.09 |
根据表8数据,利用
最终,通过信息公理分析,选择信息含量最小的方案2(三自由度)作为清扫臂的设计方案。该方案在保证清扫能力的同时,实现了合理的轻量化设计、控制复杂度和适应能力,能够较好地满足机器人在复杂钢结构上的清扫需求。
基于公理设计理论,清扫机器人各关键功能模块均采用解耦或独立设计,并通过独立公理和信息公理确保了设计的合理性与高效性。最终形成了分体式三单元多抱臂结构以及对称放置清扫臂的设计方案,充分满足了复杂钢结构场景下对机器人移动性能、安全性及清扫效率的需求。
1.2 机器人总体结构设计
1.2.1 机器人本体结构
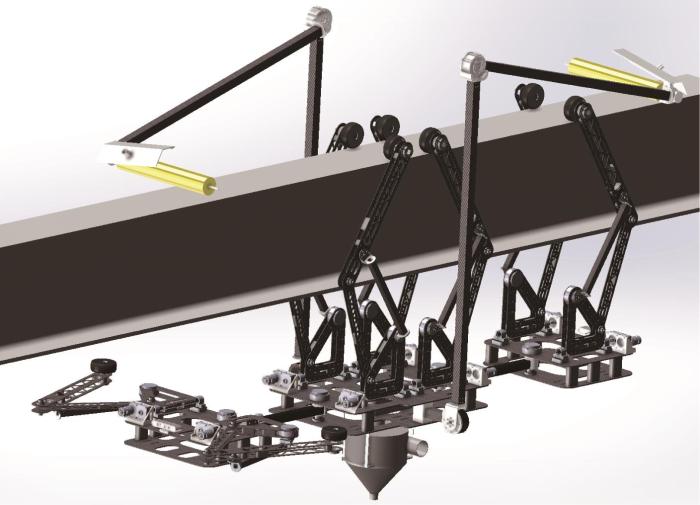
阀厅钢结构清扫机器人的本体结构如图3所示,主要由移动单元和清扫单元两部分组成。其中:移动单元用于实现机器人在钢结构上的移动、越障和转向;清扫单元负责清扫作业。
图3
1.2.2 移动单元
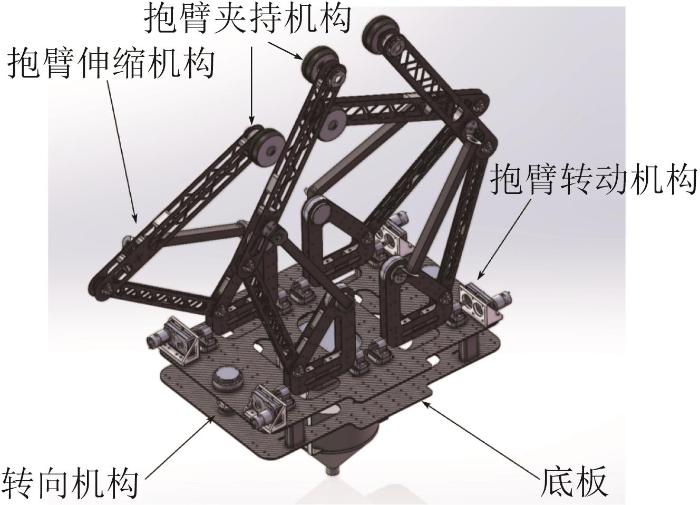
移动单元是机器人实现移动、转向、越障的关键功能部件,其由3个结构相似的移动子单元一字排列构成,相邻子单元之间可以转动。每个移动子单元包括抱臂机构(由抱臂夹持机构与抱臂伸缩机构组成)、底板、转向机构及传感器等核心部件,如图4所示。抱臂机构是确保机器人稳定挂靠在钢结构上的核心组件。抱臂机构的动作主要依靠抱臂伸缩机构和抱臂转动机构来实现。抱臂转动机构固定在每个移动子单元的底板上,通过电机驱动抱臂底部,以实现整个抱臂机构的转动。抱臂伸缩机构通过关节电机驱动连杆机构来实现抱臂的伸缩(抱臂长度可在50~130 cm之间调节),从而增强适应性。基于这一抱臂系统的设计,机器人能够在不同规格、复杂布局的钢结构上完成越障和转向。
图4
当机器人遇到障碍物时,某一移动子单元能够解除与当前钢结构的接触,由其他移动子单元继续驱动前进,从而实现该移动子单元的越障;同理,可实现所有移动子单元的越障;当机器人需要转向时,某一移动子单元能够解除与钢结构的接触,并转向至目标钢结构下方,随后该移动子单元恢复与钢结构的接触,从而实现转向;同理,可实现所有移动子单元的转向。分体式三单元设计保证了机器人的通过性。
1.2.3 清扫单元
为了提高机器人的清扫效果并确保其高空作业的安全性,清扫单元中的2个清扫臂采用对称放置设计。对称布置的清扫臂有助于保障机器人重心的初始稳定性,从而提高清扫效率和作业安全性。清扫臂具备灵活伸展的能力,在进行清扫作业时可以覆盖更大的清扫区域。同时,清扫臂可以自主调节姿态以保持机器人重心的动态平衡,避免机器人在高空作业时的倾覆风险。
2 清扫机器人运动姿态分析
2.1 越障运动姿态分析
图5
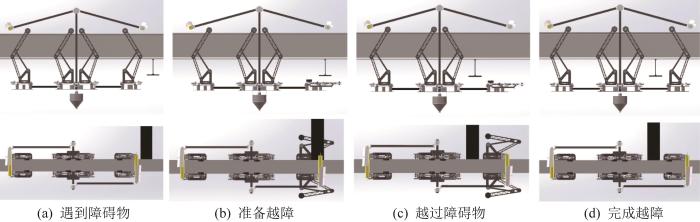
图5
机器人越障运动姿态分解
Fig.5
Decomposition of obstacle-crossing motion posture for robot
2.2 转向运动姿态分析
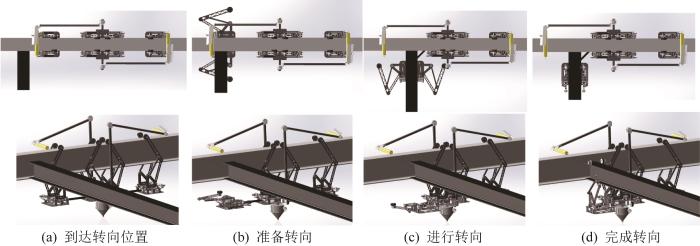
清扫机器人的转向过程如图6所示。当机器人刚运动至需要转向的位置时,其姿态如图6(a)所示,首先,第一移动子单元的抱臂在向外转动的同时向内回收以缩短长度,避免与周围钢结构碰撞,如图6(b)所示。然后,第一移动子单元和第二移动子单元的电机共同驱动转向机构,以调整第一移动子单元的方向,直到其旋转至目标钢结构下方,如图6(c)所示。接着,抱臂向外伸展并恢复抱式姿态,同时调整长度以牢固夹持住新的钢结构,从而完成第一移动子单元的转向,如图6(d)所示。第二移动子单元和第三移动子单元依次完成第一移动子单元的动作,通过各子单元的协调工作实现机器人在复杂钢结构中的平稳转向,以确保其在清扫过程中的灵活性和方向调整能力。
图6
2.3 抱臂伸缩机构运动分析
由于阀厅钢结构的复杂性和多样性,每个抱臂需要独立控制,并具备稳定、灵活且精准的长度调节能力,以适应不同的钢结构环境,从而确保清扫机器人高空作业的安全性和可靠性。为此,抱臂伸缩机构采用四连杆机构作为抱臂长度调节的驱动机构,如图7所示。该机构能够提高抱臂的伸缩精度。
图7
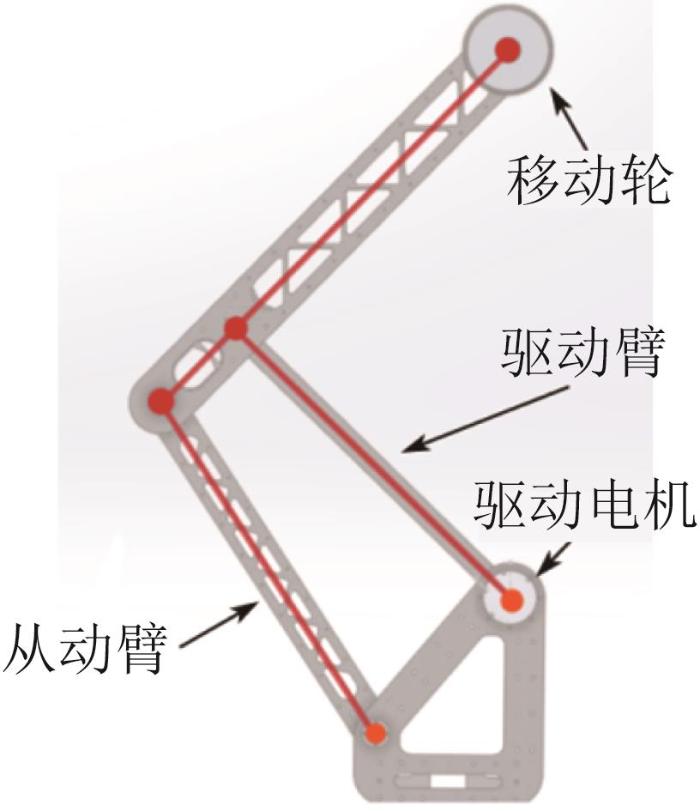
在运行过程中,驱动电机带动连杆机构调节各个抱臂的长度,以精确控制抱臂末端移动轮的位置,确保其在越障、转向过程中能够适应不同高度的钢结构,避免与周围钢结构发生碰撞,从而保证机器人运动的稳定性。为提高抱臂在伸缩过程中对移动轮位置的控制精度,对四连杆机构进行了优化,重点分析并优化了其关键几何参数,包括连杆长度、固定点坐标以及关节的初始角度。通过优化来使抱臂末端的轨迹更加线性化,确保移动轮在复杂运行环境中的稳定性和可靠性。为了直观展示抱臂末端移动轮的运动路径,以驱动电机中心为原点建立图8所示的坐标系,并构建抱臂伸缩机构的运动学模型,进而对移动轮的运动轨迹进行分析。
图8
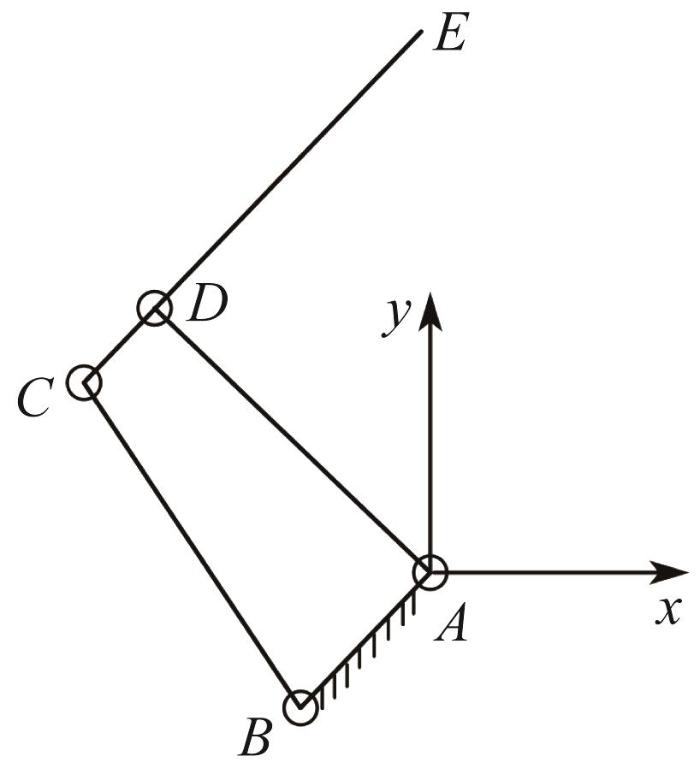
根据图8的坐标系,建立位置分析方程:
式中:LAB 、LBC 、LCD 、LAD 为各连杆的长度,φAB 、φBC 、φCD 、φAD 为各连杆的夹角。
对位置分析方程求关于时间的导数,得到角速度方程:
由此得到对应的运动方程:
解算
式中:LDE 为点D、E之间的距离。
图9
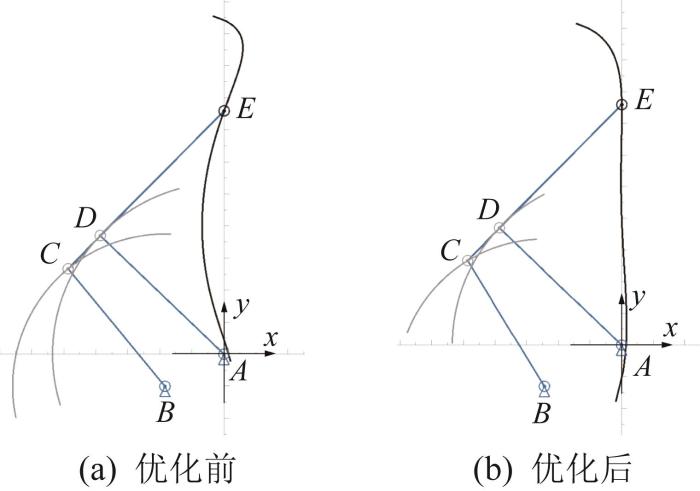
图9
优化前后移动轮的运动轨迹对比
Fig.9
Comparison of motion trajectory of mobile wheel before and after optimization
3 清扫机器人关键结构分析及优化
3.1 受力分析
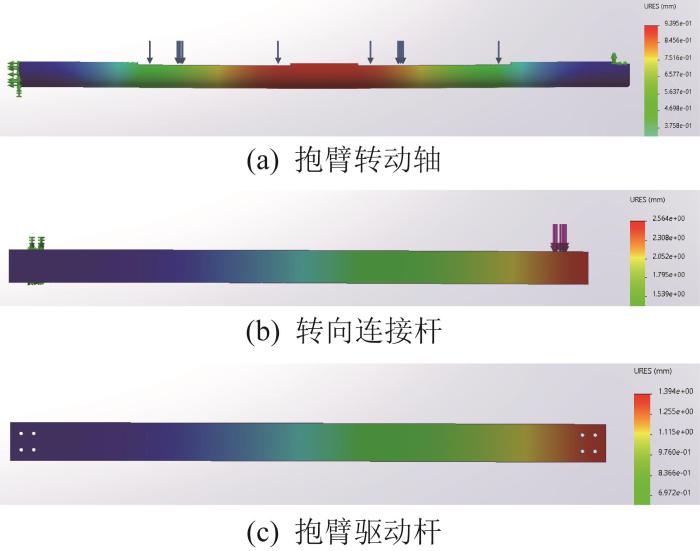
由于阀厅钢结构清扫机器人运行时处于高空环境,其本体结构的可靠性和安全性尤为重要。因此,须对机器人的关键部件(如抱臂转动轴、转向连接杆、抱臂驱动杆)进行受力分析。其中,抱臂转动轴的形变可能会影响抱臂的转动精度及其连接处的安全性;转向连接杆的形变可能会导致转向精度下降;抱臂驱动杆的形变可能会导致末端移动轮的定位偏差,进而影响机器人整体的安全性。
通过SolidWorks Simulation软件对机器人关键部件的应力集中点进行仿真计算,以评估部件能够承受的实际工作载荷;随后,对关键部件在工作载荷下的最大形变量进行评估,以验证其刚度是否满足设计要求。针对机器人的薄弱部位,通过改进材料和结构设计来提升强度和可靠性。
在仿真过程中,分析机器人在高空作业中所承受的外力,并对其关键部件施加等效工作载荷:对抱臂转动轴施加450 N·mm的扭矩载荷,以模拟其在抱臂展开或收缩过程中所承受的驱动力矩;对转向连接杆末端施加600 N的压力,以模拟末端连接处的纵向载荷;对抱臂驱动杆施加500 N 的拉力载荷,以模拟其在传递驱动力时的受载情况。机器人关键部件在工作载荷下的形变量如图10所示。由图10可以看出,抱臂转动轴的最大形变量为0.94 mm,转向连接杆的最大形变量为2.56 mm,抱臂驱动杆的最大形变量为1.39 mm。结果表明,机器人各关键部件的结构强度和形变量均满足要求,可通过局部优化来进一步提高其性能,以确保机器人高空作业的安全性和可靠性。
图10
3.2 轻量化设计
鉴于清扫机器人在高空作业,工作场景复杂且结构组件较多,其质量对作业安全性和控制精度具有重要影响。因此,本文在结构设计过程中采用轻量化策略。为了满足轻量化要求,在设计机器人时大量采用碳纤维材料,包括碳纤维板和碳纤维方管。碳纤维具有优异的强度质量比,已成为理想的结构材料,可使机器人在保证足够强度和刚度的同时显著减小整体质量。在此基础上,运用拓扑优化技术对机器人关键部件进行进一步的轻量化设计,通过对部件的几何形状与结构布局进行优化,在保证部件功能性和安全性的前提下有效减小其质量。在给定的载荷、设计空间和边界条件下,拓扑优化能够实现应力最小化和形状最优化,兼顾轻量化和制造可行性。例如:针对机器人的底板和抱臂,利用拓扑优化对其几何结构进行设计,优化结果如图11所示。经过拓扑优化和结构紧凑化设计,机器人底板的质量减小了27%,抱臂质量减小了23%,各移动子单元底板的长度减小了16.7%,在实现减重的同时优化了整体结构。最终机器人整体质量共减小16 kg。通过上述轻量化设计,不仅显著减小了机器人的整体质量,还提升了其作业效率与安全性,为其在高空复杂环境下的长时间运行提供了保障。
图11
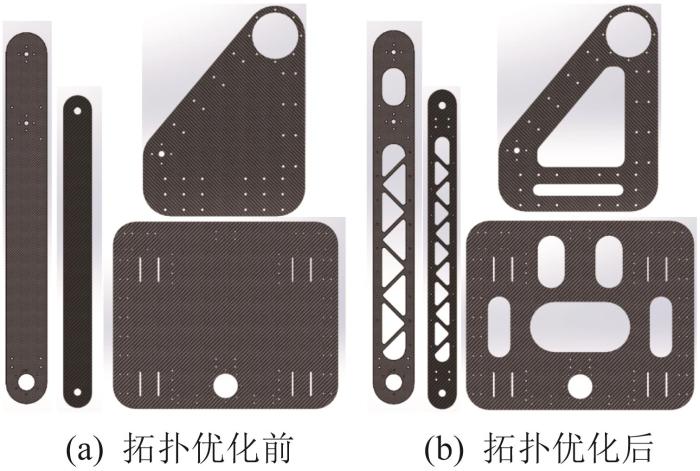
图11
机器人关键部件拓扑优化前后对比
Fig.11
Comparison of key components of robot before and after topology optimization
4 清扫机器人控制系统设计
4.1 运动控制系统设计
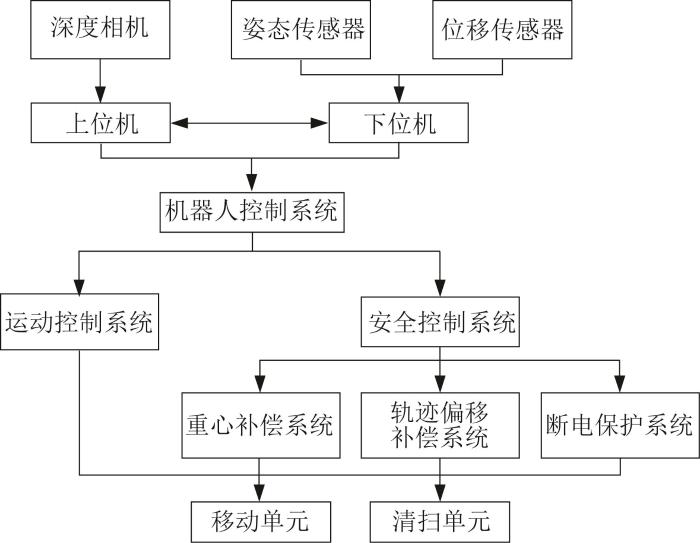
在清扫机器人运行过程中,需要对关节电机(超过30个)以及深度相机、姿态传感器、位移传感器等十多个传感器进行控制,这对控制的实时性和可靠性提出了极高的要求。基于此,本文提出了上位机(微型计算机)和下位机(单片机)协同工作的控制方案,即上位机负责全局指令的生成与任务规划,下位机负责运动控制与数据采集。所有的控制组件(包括上位机、下位机、电机和传感器)均通过CAN(controller area network,控制器局域网)总线实现数据传输,以确保指令传递的实时性和精确性。
为满足机器人对电机的精准控制要求,使用MIT(Massachusetts Institute of Technology,麻省理工学院)力矩控制算法与磁场定向控制(field-oriented control, FOC)算法进行控制。MIT力矩控制算法是一种自适应控制方法,具有较强的实时性和鲁棒性,适用于在复杂环境中对电机转矩和运动状态进行动态调整。通过控制参数的实时调整,可使机器人在复杂的钢结构表面实现平稳运动。FOC算法通过精确控制电机的转矩和磁场方向,来提升电机效率和控制精度,从而实现对电机速度和转矩的精确控制。结合这2种算法的运动控制系统可为高动态负载下机器人在阀厅钢结构上的平稳、精确移动提供保障。
4.2 安全控制系统设计
考虑到清扫机器人运行时位于阀厅顶部,其安全性至关重要。针对这一特殊场景的安全需求,设计了一整套安全控制系统,包含以下功能模块。
1)断电保护系统。所有关节电机均配备电子抱闸功能,在意外断电时,电机可实现自锁,以防止机器人坠落。
2)轨迹偏移补偿系统。机器人在阀厅顶部钢结构上行进时,钢结构表面涂层不平整或运动控制累积误差可能会导致其轨迹偏移。若在移动过程中出现偏移,不仅会导致机器人行进困难,还可能会引发脱轨、掉落等安全事故。为了确保机器人能够精准地沿预定路径行进,在其抱臂上安装高精度的位移传感器,用于实时采集机器人在移动过程中与钢结构的距离。若检测到机器人轨迹发生偏移,则系统会立即识别偏移方向并进行偏移校正,从而确保机器人沿预定路径稳定、安全地行进。
3)重心补偿系统。机器人在转向或进行清扫作业时可能会出现重心偏移或倾斜等现象。利用姿态传感器实时监测机器人的三维姿态信息,当倾斜角度超过设定阈值时,系统自动识别倾斜方向与倾斜程度。当检测到机器人姿态发生偏转后,需进行重心补偿,系统将自动开启对侧的抱臂机构,通过调整抱臂的展开角度和伸出距离,来实现对机器人重心的动态调节,以保证其整体姿态处于稳定。例如:当机器人在清扫过程中被检测到姿态向左偏转时,系统会展开右侧的抱臂机构,以将重心拉回到中心位置;反之亦然。这种重心补偿策略有助于增强机器人在运行时的稳定性,避免其因重心偏移而翻倒或滑移。
综上,整个机器人的控制系统架构如图12所示。通过这些控制技术,机器人能够实现在阀厅顶部钢结构上稳定、灵活和安全地移动。基于MIT力矩控制算法与FOC算法的运动控制系统保证了电机控制的精准性,基于位移传感器和姿态传感器的安全控制系统确保了机器人在高空复杂环境中作业的安全性和稳定性。
图12
5 清扫机器人样机实验
5.1 机器人可靠性测试
根据设计方案和仿真结果,制作清扫机器人样机,如图13所示。
图13

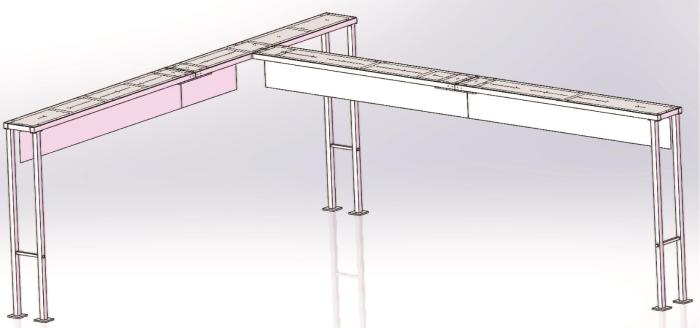
结合实际阀厅顶部钢结构的具体特征,搭建了一个钢结构测试台架以开展相应测试。机器人抱臂竖直伸展时的尺寸为2.8 m
图14
5.2 机器人功能测试
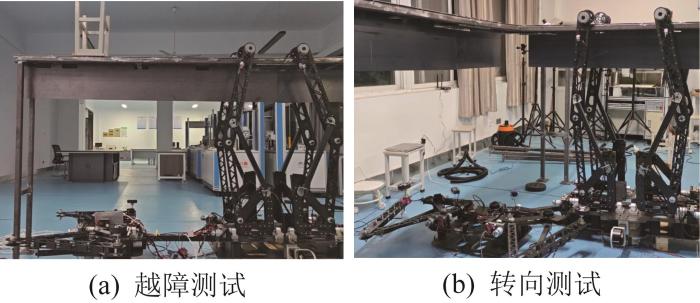
在钢结构测试台架上设置障碍物,以测试机器人的越障功能,如图15(a)所示。在测试过程中,将机器人各移动子单元的抱臂依次展开,并使某一子单元暂时脱离工字钢,以留出越障所需的空间。在越障时,抱臂伸展形成的最大垂直高度hv=1 300 mm,而被夹持钢结构的最大高度hs=588 mm,则机器人理论上可跨越的最大障碍高度Hmax=712 mm。由于机器人的最大越障高度大于阀厅顶部型钢叠加而成的最大障碍高度,说明其满足实际越障需求。测试结果表明,机器人的3个移动子单元依次执行越障动作,说明其具备越障能力;机器人能够稳定地完成越障动作,验证了其在钢结构环境中的通过性。随后,在钢结构测试台架上对机器人的转向功能进行测试,以评估其灵活性和精准性,如图15(b)所示。测试结果显示,机器人能够在复杂的钢结构环境中实现平稳的转向操作。
图15
在测试台架上完成机器人的功能验证后,在实际阀厅顶部的钢结构上开展了实地测试并评估其清扫速度,如图16所示。
图16

图16
机器人位于阀厅顶部钢结构处
Fig.16
Robot located at the top steel structure of valve hall
机器人的清扫速度由清扫时的行进速度、清扫宽度、作业覆盖率和效率损失共同决定,其计算式如下:
其中:
式中:veff为清扫速度;vc为行进速度,实测值为180 mm/s;wc为清扫宽度,平均值为250 mm;η为作业覆盖率,由于不同钢结构存在遮挡、交叉等现象,通过统计计算得到η=0.85;ηloss为效率损失,主要由机器人越障、转向时的间歇性启停引起;Dtheory为理论通过距离;Dactual为实际通过距离。
图17

图17
机器人在阀厅钢结构上的运动测试
Fig.17
Motion test of robot at the steel structure in valve hall
图18

图18
机器人在阀厅钢结构不同位置的清扫测试
Fig.18
Cleaning tests of robot at different positions of steel structure in valve hall
6 结 论
本文针对阀厅顶部钢结构的复杂环境,开展了清扫机器人的功能需求分析,并基于公理设计理论得到了一种清扫机器人创新设计方案。该机器人的移动单元以分体式三单元多抱臂结构为核心,确保了机器人在复杂钢结构中的通过性和可靠性。同时,清扫单元采用对称放置的清扫臂,满足了阀厅顶部钢结构的清扫需求。同时,设计了机器人在复杂钢结构上越障、转向时的运动姿态。
在结构设计方面,通过仿真对机器人的关键部件进行受力分析,验证了其结构强度和可靠性。同时,通过拓扑优化与结构紧凑化设计,实现了机器人的轻量化设计,优化后机器人整体质量减小了16 kg。在控制系统方面,设计时充分考虑了控制的实时性、可靠性以及高空作业的安全性,设计了断电保护系统、轨迹偏移补偿系统和重心补偿系统,提高了机器人作业的稳定性,显著降低了安全风险。
最后,制作了机器人样机并开展了可靠性和运动功能测试。测试结果表明,机器人在钢结构上可跨越最大高度为712 mm的障碍,其清扫时的行进速度为180 mm/s,清扫速度达100 m2/h,满足实际需求。测试结果验证了所设计的清扫机器人具备良好的通过性与安全性,能够高效完成换流站阀厅复杂钢结构环境下的清扫任务。
参考文献
±1 100 kV/12 000 MW特高压直流输电工程成套设计研究
[J].
System design of ±1 100 kV/12 000 MW UHVDC transmission project
[J].
电力智能巡检机器人研究综述
[J].
Review of electric power intelligent inspection robot
[J].
输电线路智能带电检修关键技术研究综述
[J].
Review on intelligent live-line maintenance technology applied on power transmission lines
[J].
基于空间关系的变电站巡检机器人巡检点自主生成方法
[J].
Autonomous generation method of substation inspection robot inspection point based on spatial relationship
[J].
阀厅智能巡检机器人运动控制系统
[J].
Intelligent inspection robot motion control system for valve hall
[J].
基于红外测温技术的±500 kV换流站平波电抗器套管缺陷诊断分析与处理
[J].
Research and treatment on the smoothing reactor bushing defect of the ±500 kV converter station based on infrared temperature measurement technology
[J].
换流阀厅壁面清洁机器人的控制系统设计与研究
[D].
Control system design and research of cleaning robot for the wall of the converter valve hall
[D].
换流站阀厅内壁清洁机器人的设计
[J].
Design of cleaning robot for inner wall of converter station valve hall
[J].
Ascento: a two-wheeled jumping robot
[C]//
Design by robot: a human-robot collaborative framework for improving productivity of a floor cleaning robot
[C]//
船舶除锈爬壁机器人技术研究
[D].
The study of wall climbing robot for removal rust in vessels
[D].
爬壁机器人悬摆式磁吸附机构的设计与优化
[J].
Design and optimization of pendulous magnetic adsorption mechanism for wall-climbing robots
[J].
轮足式磁吸附越障爬壁机器人设计与分析
[J].
Design and analysis of wheel-footed magnetic adsorption wall-climbing robot with passing obstacles capability
[J].DOI:10.3901/jme.2024.01.248 [本文引用: 1]
基于仿蟹刚柔耦合机构的搜救机器人设计
[J].
Design of a search and rescue robot with crab-inspired rigid-flexible coupling mechanisms
[J].
仿青蛙游动机器人机构设计
[J].
Mechanical design of frog inspired swimming robot
[J].
多臂协作机器人技术与应用现状及发展趋势
[J].
Review of technology, application status and development trend in multi-arm cooperative robots
[J].DOI:10.3901/jme.2023.15.001 [本文引用: 1]
大直径长引水隧洞水下检测机器人系统关键技术
[J].
Key technology of underwater inspection robot system for large diameter and long headrace tunnel
[J].
Design and performance study of a six-bar mechanism underwater robot based on cownose ray bionics
[J].
基于公理设计和多色集合的树障清除机器人方案设计
[J].
Scheme design of tree barrier removal robot based on axiomatic design and polychromatic set
[J].
基于公理设计的静压滑动轴承设计软件开发研究
[J].
Development research of bearing design software based on axiomatic design
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}