


本文链接:
随着海洋强国战略的实施和不断推进,无人遥控潜水器(remotely operated vehicle, ROV)已在多个领域替代人工进行观测作业。其中,开架型ROV具有作业效率高、价格低廉等优势[1]。但是,开架型结构的单一性导致ROV在运动灵活性和稳定性方面存在缺陷[2]。ROV在高速航行时常常因水下环境复杂而产生姿态纵倾问题,导致无法获得预期图像或视频[3]。常规改善ROV纵倾缺陷的手段主要有2种:推进器补偿[4]和结构优化[5]。其中:推进器补偿只能在ROV前后垂向推进器不少于2个时采用,可通过PID(proportional integral derivative,比例-积分-微分)控制[6]、模糊控制[7]等方式来进行纵倾幅值补偿,以保持ROV姿态稳定。结构优化通常采用改变配重块位置的方式,即在不影响ROV静态平衡的前提下,通过改变配重块位置来增大ROV的回转力矩。改变配重块位置虽可改善ROV的纵倾问题,但过大的重量会增加推进器的负担,从而降低ROV的最大航行速度[8]。
为解决上述问题,本文通过改变扩展底盘的高度和增加尾翼结构来改变水动力合力的位置,从而减小由推力和水动力引起的旋转力矩,以使欠驱动型ROV(只有1个前后垂向推进器)可在最大航行速度不受影响的情况下以零纵倾或微纵倾的运动方式平稳地接近目标物体。
1 欠驱动型ROV的结构参数
图1

表1 欠驱动型ROV的主要结构参数
Table 1
| 参数 | 数值 |
|---|---|
| 主体质量/kg | 65 |
| 主体外形尺寸①/(mm×mm×mm) | 550 |
| 扩展底盘尺寸①/(mm×mm×mm) | 550 |
| 垂向推进器数量/个 | 2 |
| 水平推进器数量/个 | 8 |
| 最大水平推力/N | 700 |
| 正浮力/N | 20 |
① 尺寸指长
2 格子玻尔兹曼方法
在格子玻尔兹曼方法(lattice Boltzmann method, LBM)中,流体被离散成微观粒子,微观粒子在离散格子上碰撞和迁移,通过统计微观粒子的运动情况来获得流体的宏观运动特性。该方法采用分布函数
式中:
LBM的关键在于构造粒子之间的碰撞模型。对于运动复杂、速度较快的流体,常采用多松弛时间模型。多松弛时间模型
式中:
3 欠驱动型ROV航行运动仿真分析
3.1 计算流域参数设置
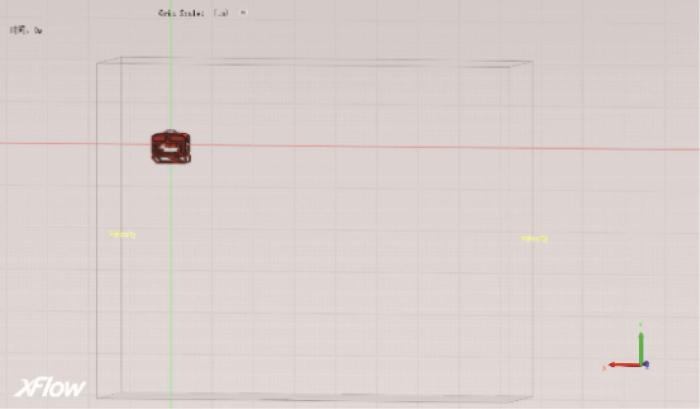
本文利用SolidWorks软件来完成欠驱动型ROV各模块零件的建模与装配[12],并配置ROV各零件的材料参数,得到其重心、浮心位置等质量属性[13]。随后,将ROV三维模型导入XFlow软件,并基于LBM对ROV的计算流域进行大涡模拟,如图2所示。XFlow软件的预处理器可以根据每个几何图形的分辨率自动生成原始的网格结构,无须浪费时间绘制网格[14-15]。本文将ROV计算流域的远场分辨率设为0.050 m,近壁、尾迹分辨率设为0.025 m[16]。采用自适应细化算法对ROV壁面及其周围流域的网格进行自动加密;采用均匀非平衡壁函数来模拟ROV的边界层。选择虚拟风洞模式[17],并将计算流域尺寸设置为10 m×8 m×3 m[18],所生成的网格数约为3.9×106个。计算流域两侧分别设置为自由进口和自由出口,流域内为不可压缩流体,其参考密度为1 000
图2
3.2 仿真结果验证
图3
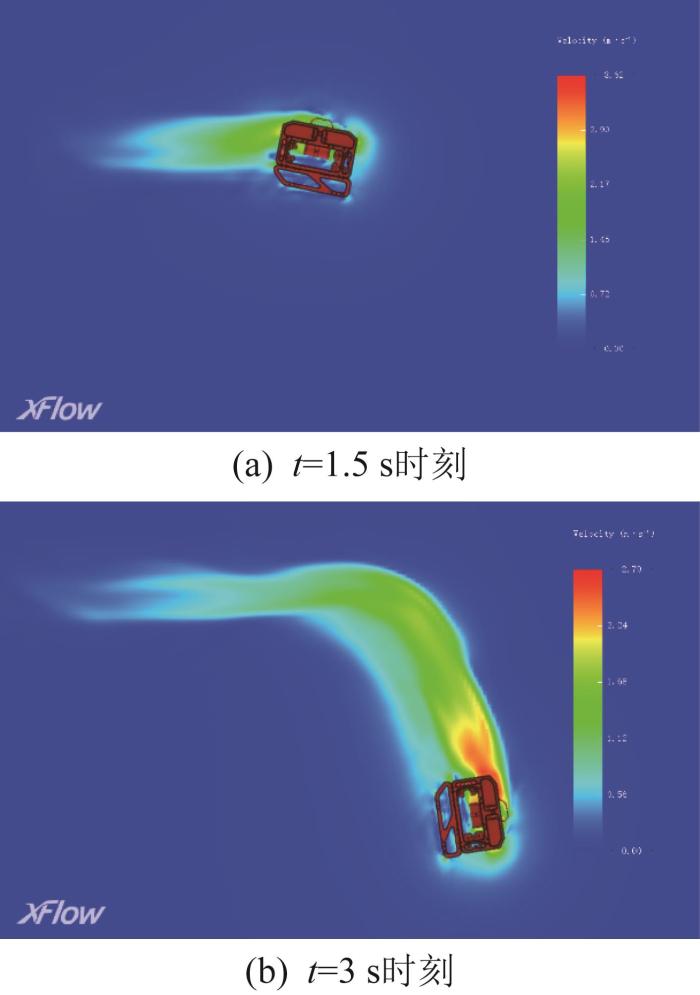
由图3可知,在欠驱动型ROV航行过程中,因推进器作用位置靠下和起始推力迅速增大,ROV先作抬艏运动,但抬艏运动持续时间较短,约为0.2 s。当ROV抬艏一定时间后,在旋转力矩和回转力矩的双重作用下,其抬艏角度迅速减小,最终恢复为0°,该过程约持续0.1 s。之后,因旋转力矩远大于回转力矩,ROV开始作埋艏运动,埋艏角度最终可达90°。
为获得ROV实际航行时的纵倾幅值和纵倾角度数据,先将ROV放置在水中并静止半分钟,待ROV稳定后通电运行;通电后,迅速将控制手柄推至功率最大位置,以使ROV全力前行。在ROV航行过程中,利用惯性导航系统和深度计获取特定时刻下ROV的纵倾幅值和纵倾角度并记录。欠驱动型ROV纵倾幅值、纵倾角度的实测值与仿真值的对比如图4所示。
图4
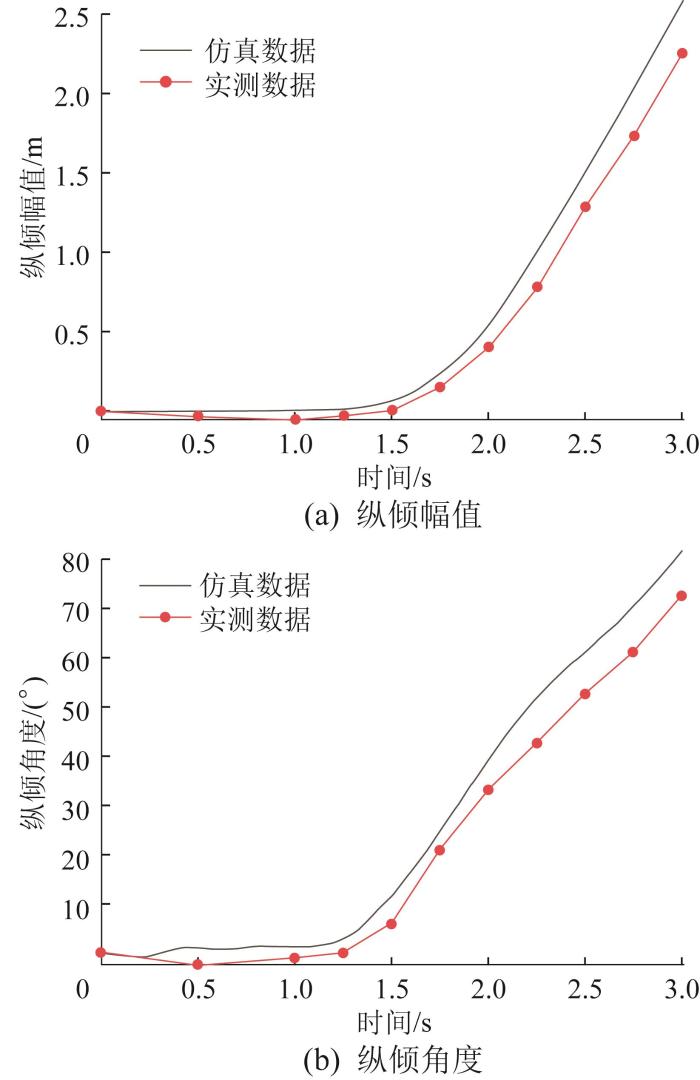
图4
欠驱动型ROV纵倾幅值、纵倾角度的实测值与仿真值对比
Fig.4
Comparison of measured and simulated values of longitudinal pitch amplitude and longitudinal pitch angle of underdriven ROV
图4结果显示,该欠驱动型ROV的纵倾幅值、纵倾角度的实测数据与仿真数据的变化趋势一致,数值基本吻合,两者的最大相对误差为13.6%。由此说明,LBM可模拟ROV的真实航行运动,基于XFlow软件得到的仿真结果可为ROV的结构优化提供理论支持。
4 欠驱动型ROV结构优化方案选择
本文通过结构优化(调整扩展底盘高度和增加尾翼结构)来干涉欠驱动型ROV所受的水动力,以达到减小旋转力矩、纵倾幅值和纵倾角度的目的。
4.1 扩展底盘对ROV纵倾的影响
图5
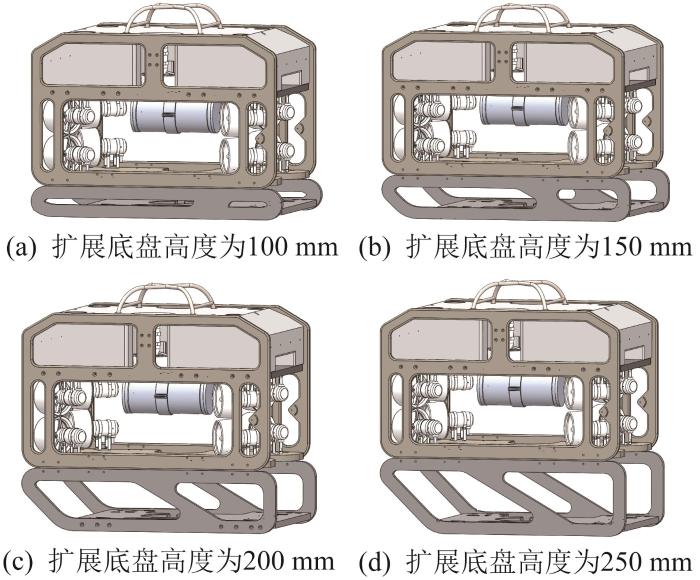
图5
扩展底盘高度不同的欠驱动型ROV三维模型
Fig.5
Three-dimensional models of underdriven ROV with different heights of extended chassis
图6
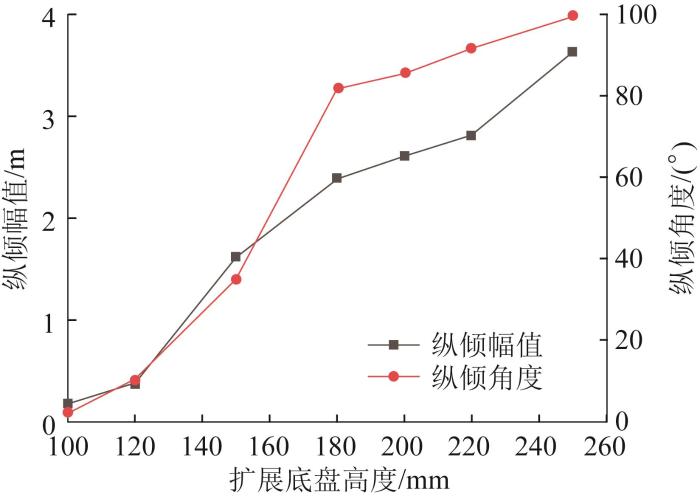
图6
扩展底盘高度对欠驱动型ROV纵倾的影响( t=3 s)
Fig.6
Effect of extended chassis height on longitudinal pitch of underdriven ROV (t=3 s)
由图6可知,欠驱动型ROV的纵倾幅值、纵倾角度与扩展底盘高度呈正相关,即扩展底盘越高,ROV的纵倾幅值、纵倾角度越大。当扩展底盘高度为100 mm时,ROV的纵倾幅值与纵倾角度均最小,此时ROV航行得最平稳。当扩展底盘高度增大至120 mm时,ROV的纵倾幅值、纵倾角度少量增大,此时ROV仍处于平稳状态。但由于旋转力矩增大,当ROV姿态因受干扰而发生变化时,其回转力矩需较长时间才能维持平衡。当扩展底盘高度增大至180 mm时,ROV的纵倾幅值、纵倾角度急剧增大,此时ROV处于埋艏姿态,其旋转力矩大于回转力矩。随着扩展底盘高度继续增大至200 mm时,ROV的纵倾角度已接近或达到90°,此时ROV的前进性能完全失效。综上,减小扩展底盘高度可有效减小ROV的纵倾幅值和纵倾角度。因此,在满足作业设备安装要求的前提下,应尽可能减小扩展底盘的高度。
4.2 尾翼对ROV纵倾的影响
分析图3可知,ROV航行时水流速度最快处为浮力材料尾部倒角区域。水流经过此处时会对ROV施加垂直于倒角切面的压力,导致ROV向斜下方航行,通过填补此区域可有效改变压力的大小和方向。将填补结构称为尾翼,本文采用三棱柱形尾翼。欠驱动型ROV中尾翼的安装位置和结构如图7所示。在尾翼结构中,面ABD始终紧贴ROV浮力材料尾部倒角区域,线段AB、AD的长度分别与倒角对应的斜边长度、倒角区域长度相等;∠CAB恒定为倒角角度。通过控制尾翼高度(线段AC的长度)来改变尾翼形状,本文取尾翼高度分别为0,10,20,30,35,40,45,50,55,60,70 mm。根据3.1节中的仿真参数设置(扩展底盘高度为200 mm),利用XFlow软件进行仿真分析,记录t=3 s时搭载不同高度尾翼(含无尾翼情况)的欠驱动型ROV的纵倾幅值与纵倾角度,结果如图8所示。
图7
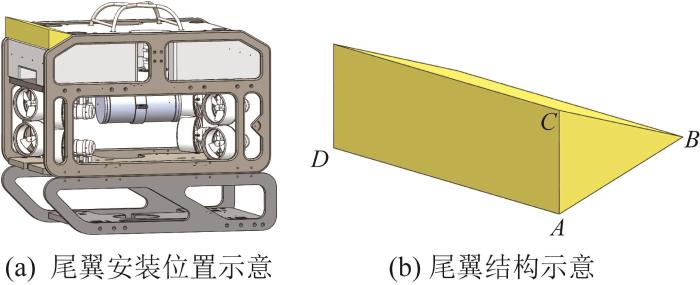
图7
欠驱动型ROV尾翼的安装位置与结构
Fig.7
Installation position and structure of underdriven ROV tailplane
图8
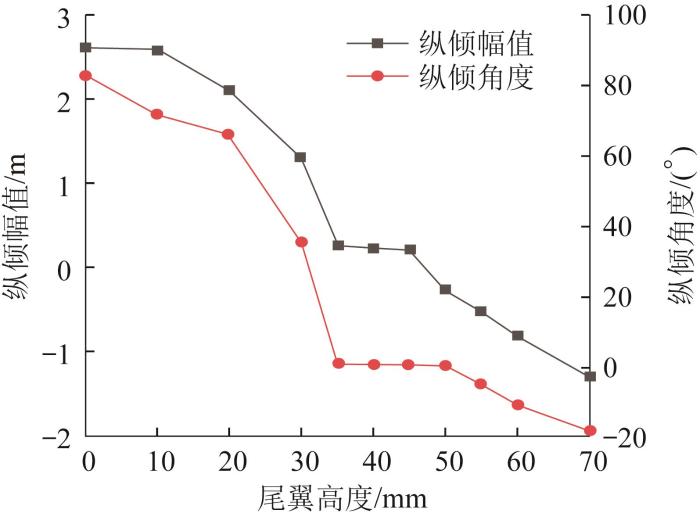
图8
尾翼高度对欠驱动型ROV纵倾的影响( t=3 s)
Fig.8
Effect of tailplane height on longitudinal pitch of underdriven ROV (t=3 s)
由图8可知,欠驱动型ROV的纵倾幅值、纵倾角度与尾翼高度整体呈负相关。当尾翼高度为0 mm(即无尾翼)时,ROV的纵倾幅值、纵倾角度最大,此时ROV作埋艏运动,且旋转力矩远大于回转力矩。当尾翼高度增大至20 mm时,ROV的旋转力矩减小,但仍远大于回转力矩,此时ROV的纵倾幅值、纵倾角度呈线性减小趋势。当尾翼高度增大至35 mm时,ROV的旋转力矩继续减小且线性变化趋势剧烈。当尾翼高度为35~45 mm时,ROV的旋转力矩小于等于回转力矩,此时ROV保持水平航行姿态。当尾翼高度从50 mm增大至70 mm时,ROV的旋转力矩反向且大于回转力矩,此时ROV作抬艏运动。综上,选择不同高度尾翼时欠驱动型ROV有埋艏、水平和抬艏三种运动姿态,故确定合理的尾翼高度是保证ROV水平航行的关键。
鉴于尾翼高度为35,40,45 mm时欠驱动型ROV的纵倾幅值、纵倾角度接近,为进一步探究这3组ROV纵倾的不同之处,对其旋转力矩的变化情况进行分析,结果如图9所示。
图9
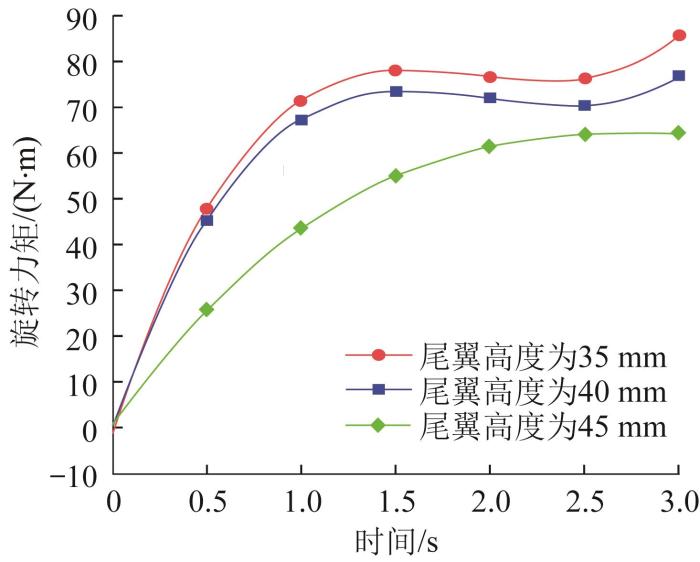
图9
尾翼高度为35,40,45 mm时欠驱动型ROV的旋转力矩对比
Fig.9
Comparison of rotating torque of underdriven ROV with tailplane height of 35, 40, 45 mm
分析图9可知,对于纵倾幅值和纵倾角度相近的3组欠驱动型ROV,其旋转力矩具有明显差异:尾翼越高,ROV的旋转力矩越小;而旋转力矩越小,回转力矩越易与旋转力矩平衡,则ROV的动态稳定性越好。因此,为使ROV更易保持水平姿态航行,当ROV的纵倾幅值和纵倾角度相近时,应选择增加较高的尾翼。
4.3 基于正交实验的扩展底盘与尾翼高度优选
表2 遗传算法的参数设置
Table 2
| 参数及函数 | 数值及表达式 |
|---|---|
| 种群数量/个 | 100 |
| 最大迭代数/次 | 500 |
| 交叉概率 | 0.5 |
| 变异概率 | 0.07 |
| 目标函数 | |
| 适应度函数 |
① E为拟合值Fh 与原始值zh 之间的均方误差,N为拟合值个数。
图10
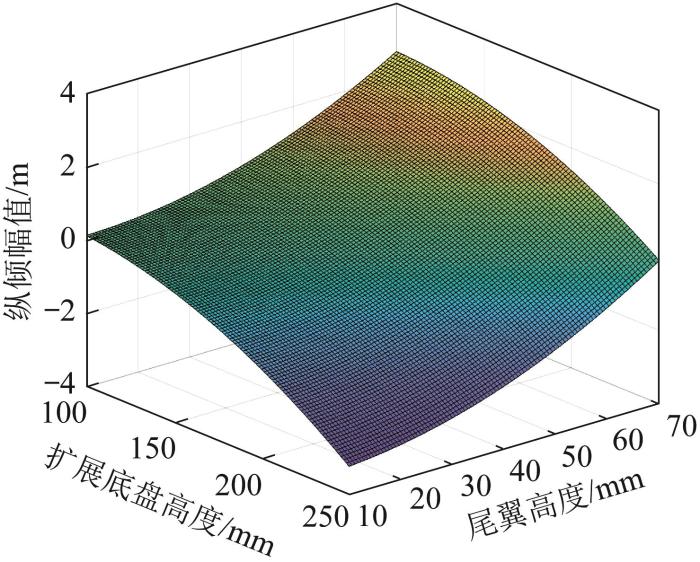
图10
欠驱动型ROV的纵倾幅值与扩展底盘、尾翼高度的关系曲面
Fig.10
Relationship surface between longitudinal pitch amplitude of underdriven ROV and height of extended chassis and tailplane
表3 7组扩展底盘高度对应的最优尾翼高度 (mm)
Table 3
| 扩展底盘高度 | 尾翼高度 |
|---|---|
| 100 | 35.29 |
| 120 | 40.68 |
| 150 | 43.17 |
| 180 | 45.26 |
| 200 | 47.53 |
| 220 | 52.94 |
| 250 | 60.15 |
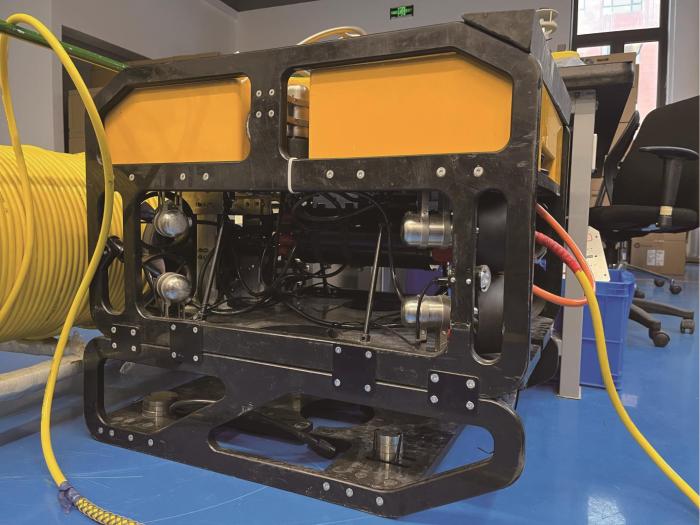
5 欠驱动型ROV样机制作与测试
图11
利用优化后的ROV样机开展水池实验,使用惯性导航系统同步记录该ROV每行驶2 m时的纵倾幅值与纵倾角度,并与优化前ROV的纵倾幅值与纵倾角度进行对比,结果如图12所示。
图12
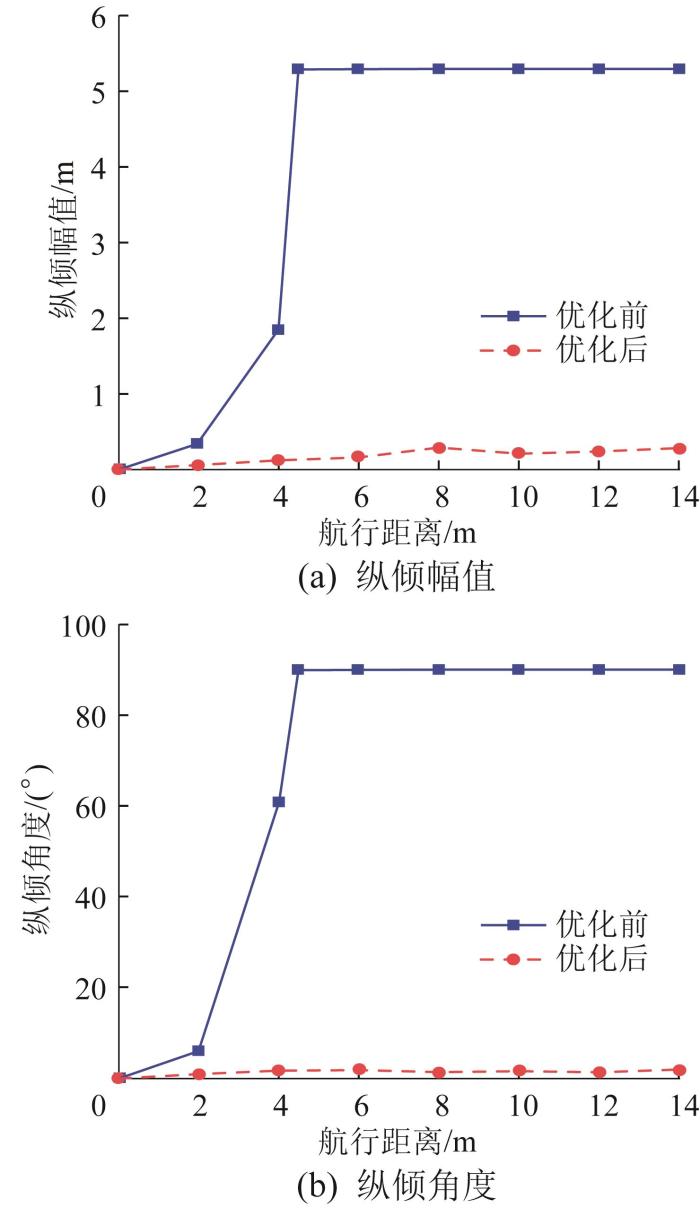
图12
优化前后欠驱动型ROV的纵倾幅值、纵倾角度对比
Fig.12
Comparison of longitudinal pitch amplitude and longitudinal pitch angle of underdriven ROV before and after optimization
由图12可知,优化前的ROV在航行了4.5 m时,其纵倾角度已达90°,航行性能失效。对于优化后的ROV,因受水流等的影响,其纵倾幅值恒定为0.3 m,纵倾角度稳定在1.5°左右,满足实际使用需求。
6 结 论
无法采用推进器进行纵倾幅值补偿的欠驱动型ROV在水域环境中易产生较为显著的纵倾运动,严重时会扰乱正常的航行运动,从而影响观测画面。本文通过调整扩展底盘高度和增加尾翼结构的方式,实现了对欠驱动型ROV纵倾幅值与纵倾角度的改善。同时,基于遗传算法拟合得到了该ROV纵倾幅值与扩展底盘、尾翼高度的关系曲面,可为ROV结构参数的确定提供指导性依据。优化后的ROV在无幅值补偿的条件下能以微纵倾姿态稳定航行,验证了本文优化方法的可行性。研究结果可为相关水下设备纵倾幅值等的改善提供参考。
参考文献
Design of omni directional remotely operated vehicle (ROV)
[J].
Dynamics modeling and control of a variable length remotely operated vehicle tether
[C]//
基于遗传算法对控制水下机器人运动姿态进行PID参数整定
[J].
PID parameter tuning of remotely operated vehicle control attitude based on genetic algorithm
[J].
Development of an underwater detection robot
[J].
全海深着陆车机构设计及其潜浮运动性能分析
[J].
Mechanism design and diving-floating motion performance analysis on the full ocean depth landing vehicle
[J].DOI:10.13973/j.cnki.robot.190375 [本文引用: 1]
Depth control of ROV in nuclear power plant based on fuzzy PID and dynamics compensation
[J].
Research on the control performance of depth-fixed motion of underwater vehicle based on fuzzy-PID
[J].
ROV加装SKID后对其作业的影响评估
[J].
Evaluation of the impact of ROV loading SKID on its operation
[J].
Design and construction of an ROV for underwater exploration
[J].
Numerical analysis of water exit for a sphere with constant velocity using the lattice Boltzmann method
[J].
开架式水下机器人水动力系数计算与动力学建模
[J].
Hydrodynamic coefficients calculation and dynamic modeling of an open-frame underwater robot
[J].DOI:10.3969/j.issn.1000-1093.2021.09.018 [本文引用: 1]
Hydrodynamic analysis of remotely operated vehicle (ROV) observation class using CFD
[J].
带缆水下机器人转首控制及水动力分析
[J].
Analysis of turning motion and hydrodynamic performance of tethered underwater robot
[J].
尾翼对微型ROV运动稳定性的影响
[J].
Research on kinematic stability of micro remotely operated vehicle with different spoilers
[J].DOI:10.13952/j.cnki.jofmdr.a4889 [本文引用: 1]
基于XFlow的仿生扑翼飞行器机翼气动特性分析
[J].
Analysis of aerodynamic characteristics of bionic flapping wing aircraft based on XFlow
[J].DOI:10.12068/j.issn.1005-3026.2021.06.010 [本文引用: 1]
基于XFlow多自由度仿鸟扑翼飞行器气动仿真
[J].
Aerodynamic simulation of multi-DOF flapping-wing air vehicle of bird-like based on XFlow software
[J].
Effect of turbulence model on simulation of vehicle aerodynamic characteristics based on XFlow
[J].
Fuzzy comprehensive evaluation for the motion performance of autonomous underwater vehicle
[J].
基于XFlow软件的双体游艇阻力准确性分析
[J].
Accuracy analysis in the resistance of catamaran based on XFlow software
[J].DOI:10.14141/j.31-1981.2019.04.011 [本文引用: 1]
Optimization of thrust propeller design for an ROV (remotely operated vehicle) consideration by genetic algorithms
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}