| 优化设计 |
|

|
|
|
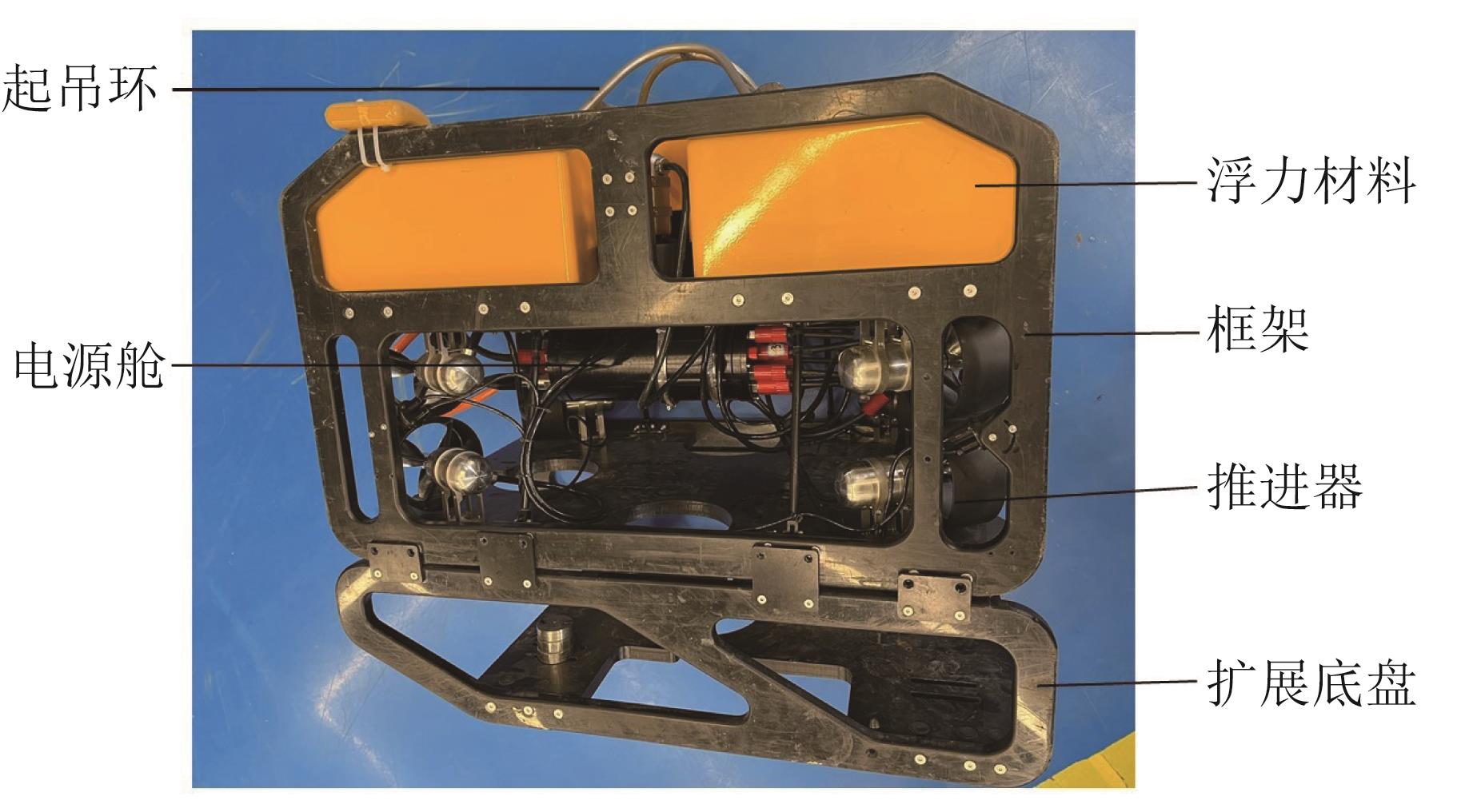
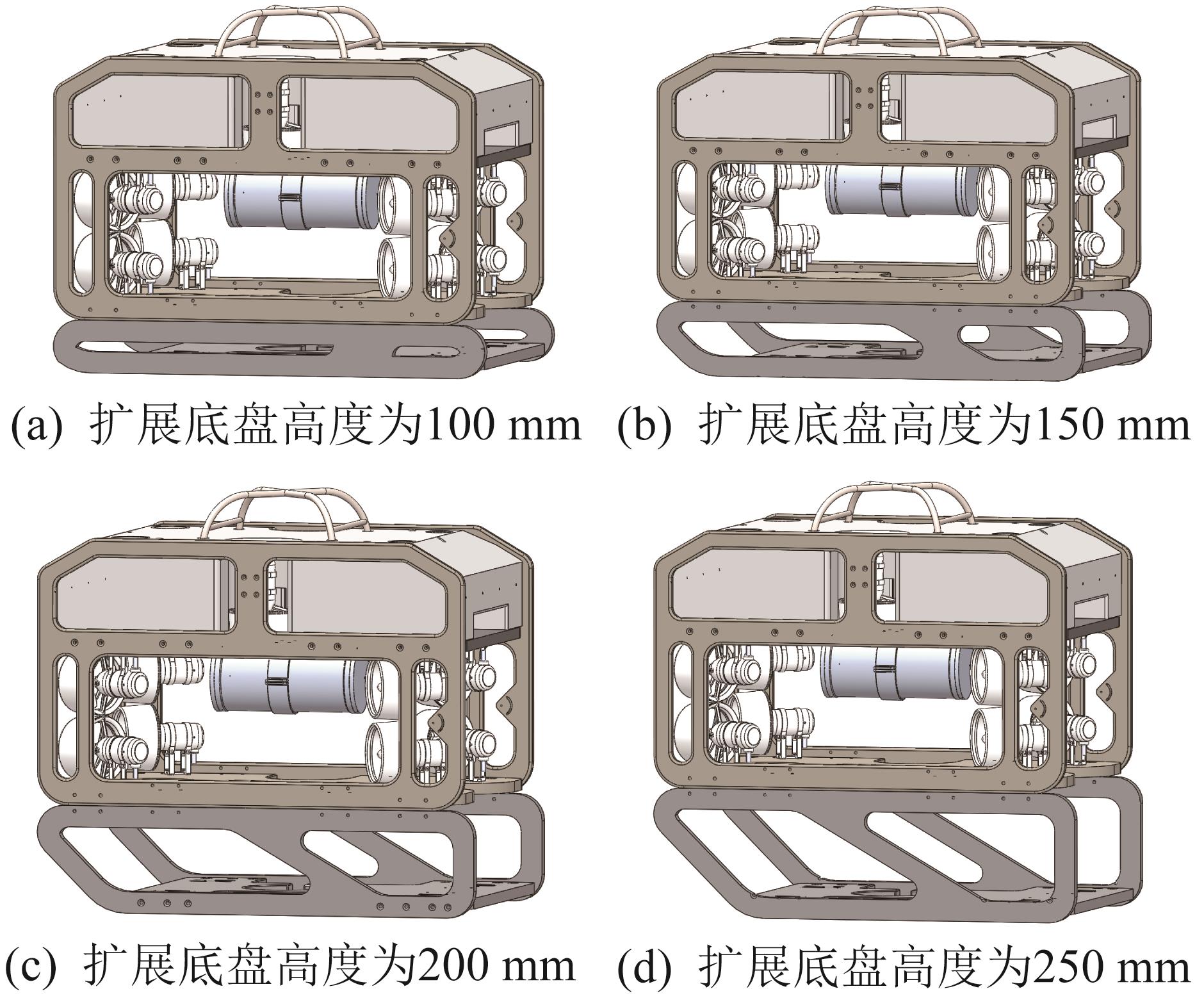
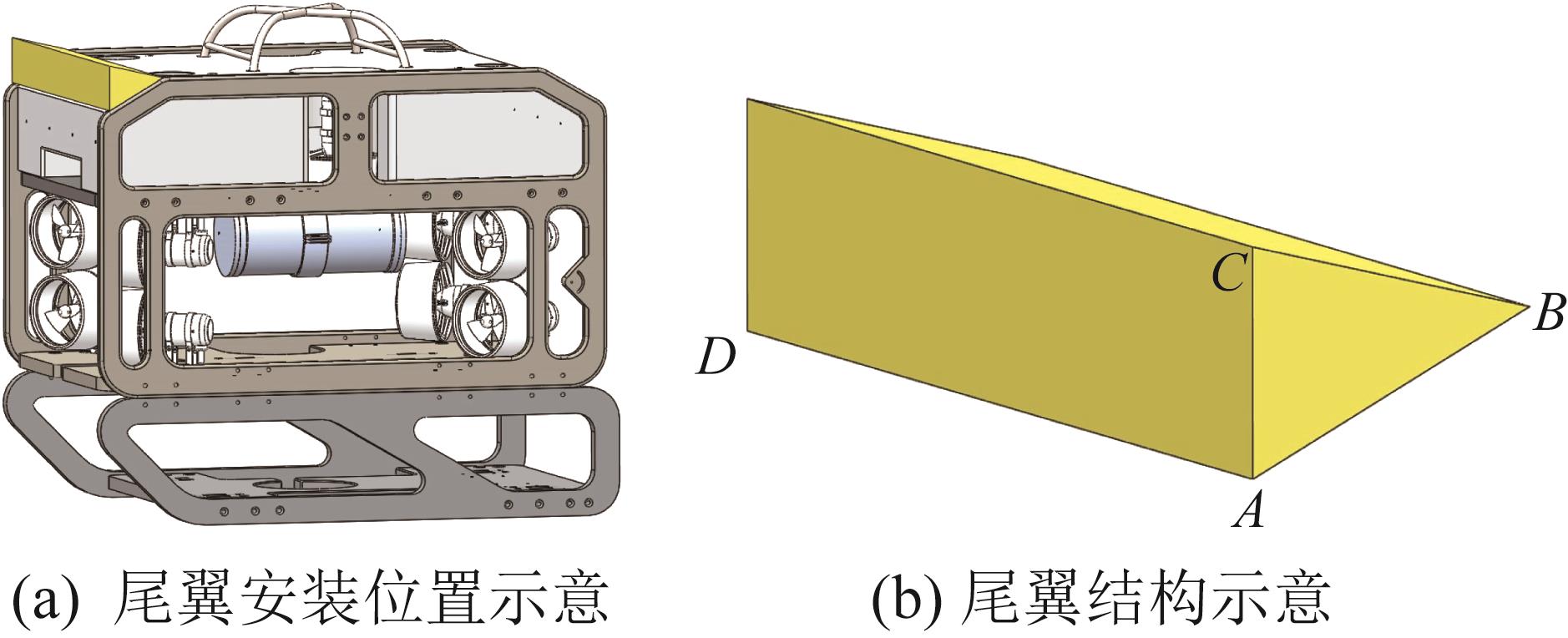
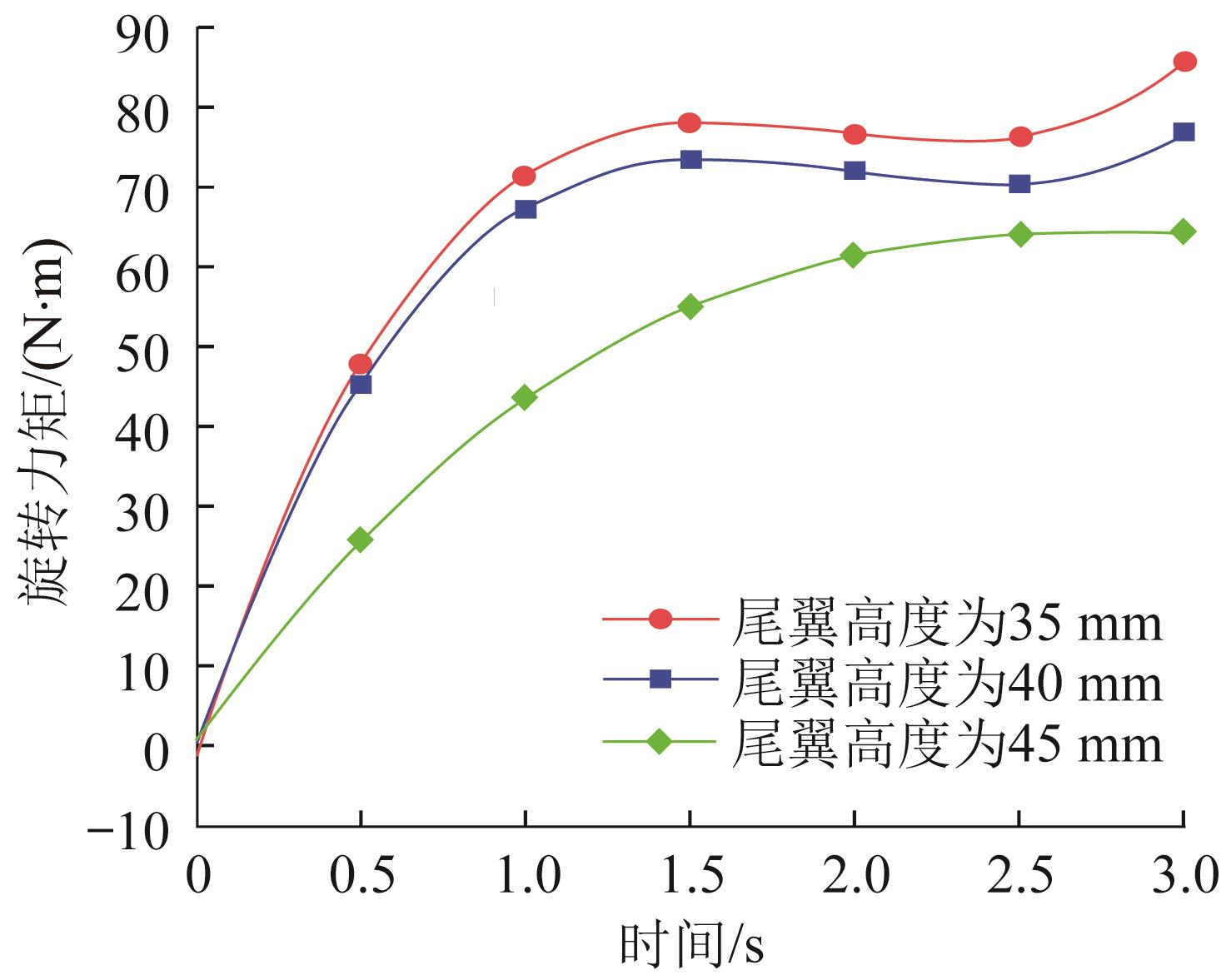
| 欠驱动型ROV改进设计与纵倾优化 |
许哲1( ),代威1,曹宇1,李永国1(),张舜2 ),代威1,曹宇1,李永国1(),张舜2 |
1.上海海洋大学 工程学院,上海 201306
2.上海遨拓深水装备技术开发有限公司,上海 201306 |
|
| Improved design and longitudinal pitch optimization of underdriven ROV |
| Zhe XU1(),Wei DAI1,Yu CAO1,Yongguo LI1(),Shun ZHANG2 |
1.College of Engineering Science and Technology, Shanghai Ocean University, Shanghai 201306, China
2.AutoSubsea Vehicles Inc. , Shanghai 201306, China |
引用本文:
许哲,代威,曹宇,李永国,张舜. 欠驱动型ROV改进设计与纵倾优化[J]. 工程设计学报, 2024, 31(4): 483-490.
Zhe XU,Wei DAI,Yu CAO,Yongguo LI,Shun ZHANG. Improved design and longitudinal pitch optimization of underdriven ROV[J]. Chinese Journal of Engineering Design, 2024, 31(4): 483-490.
链接本文:
https://www.zjujournals.com/gcsjxb/CN/10.3785/j.issn.1006-754X.2024.03.200
或
https://www.zjujournals.com/gcsjxb/CN/Y2024/V31/I4/483
|
| 1 |
RAHIMUDDIN, HASAN H, RIVAI H A, et al. Design of omni directional remotely operated vehicle (ROV)[J]. Journal of Physics: Conference Series, 2018, 962: 012017.
|
| 2 |
PRABHAKAR S, BUCKHAM B. Dynamics modeling and control of a variable length remotely operated vehicle tether[C]//Proceedings of OCEANS 2005 MTS/IEEE. Washington, DC, Sep. 17-23, 2005.
|
| 3 |
邓鲁克,吕东坡.基于遗传算法对控制水下机器人运动姿态进行PID参数整定[J].制造业自动化,2023,45(1):177-179,206.
DENG L K, LÜ D P. PID parameter tuning of remotely operated vehicle control attitude based on genetic algorithm[J]. Manufacturing Automation, 2023, 45(1): 177-179, 206.
|
| 4 |
WANG R L, LI Z Q, MA S G, et al. Development of an underwater detection robot[J]. Journal of Physics: Conference Series, 2022, 2203: 012008.
|
| 5 |
孙洪鸣,郭威,周悦,等.全海深着陆车机构设计及其潜浮运动性能分析[J].机器人,2020,42(2):207-214. doi:10.13973/j.cnki.robot.190375
SUN H M, GUO W, ZHOU Y, et al. Mechanism design and diving-floating motion performance analysis on the full ocean depth landing vehicle[J]. Robot, 2020, 42(2): 207-214.
doi: 10.13973/j.cnki.robot.190375
|
| 6 |
DONG M J, LI J F, CHOU W S. Depth control of ROV in nuclear power plant based on fuzzy PID and dynamics compensation[J]. Microsystem Technologies, 2020, 26(3): 811-821.
|
| 7 |
XIE Y, ZHU A F, HUANG Z H. Research on the control performance of depth-fixed motion of underwater vehicle based on fuzzy-PID[J]. Journal of Robotics, 2023, 2023(1): 4168433.
|
| 8 |
徐玉宁,山钦.ROV加装SKID后对其作业的影响评估[J].石化技术,2022,29(4):192-193,142.
XU Y N, SHAN Q. Evaluation of the impact of ROV loading SKID on its operation[J]. Petrochemical Industry Technology, 2022, 29(4): 192-193, 142.
|
| 9 |
AGUIRRE-CASTRO O A, INZUNZA-GONZÁLEZ E, GARCÍA-GUERRERO E E, et al. Design and construction of an ROV for underwater exploration[J]. Sensors (Basel), 2019, 19(24): 5387.
|
| 10 |
HAO H H, SONG Y P, YU J Y .Numerical analysis of water exit for a sphere with constant velocity using the lattice Boltzmann method[J]. Applied Ocean Research,2019, 84: 163-179.
|
| 11 |
闫银坡,于福杰,陈原.开架式水下机器人水动力系数计算与动力学建模[J].兵工学报,2021,42(9):1972-1986. doi:10.3969/j.issn.1000-1093.2021.09.018
YAN Y P, YU F J, CHEN Y. Hydrodynamic coefficients calculation and dynamic modeling of an open-frame underwater robot[J]. Acta Armamentarii, 2021, 42(9): 1972-1986.
doi: 10.3969/j.issn.1000-1093.2021.09.018
|
| 12 |
SATRIA D, WIRYADINATA R, ESISWITOYO D P A, et al. Hydrodynamic analysis of remotely operated vehicle (ROV) observation class using CFD[J]. IOP Conference Series: Materials Science and Engineering, 2019, 645: 012014.
|
| 13 |
许顺源,吴家鸣,马承华,等.带缆水下机器人转首控制及水动力分析[J].中国造船,2022,63(2):126-136.
XU S Y, WU J M, MA C H, et al. Analysis of turning motion and hydrodynamic performance of tethered underwater robot[J]. Shipbuilding of China, 2022, 63(2): 126-136.
|
| 14 |
王晓鸣,冯森.尾翼对微型ROV运动稳定性的影响[J].机械设计与研究,2019,35(2):30-35. doi:10.13952/j.cnki.jofmdr.a4889
WANG X M, FENG S. Research on kinematic stability of micro remotely operated vehicle with different spoilers[J]. Machine Design and Research, 2019, 35(2): 30-35.
doi: 10.13952/j.cnki.jofmdr.a4889
|
| 15 |
张志君,陈默,杨贺捷,等.基于XFlow的仿生扑翼飞行器机翼气动特性分析[J].东北大学学报(自然科学版),2021,42(6):821-828. doi:10.12068/j.issn.1005-3026.2021.06.010
ZHANG Z J, CHEN M, YANG H J, et al. Analysis of aerodynamic characteristics of bionic flapping wing aircraft based on XFlow[J]. Journal of Northeastern University (Natural Science), 2021, 42(6): 821-828.
doi: 10.12068/j.issn.1005-3026.2021.06.010
|
| 16 |
杨永刚,苏汉平.基于XFlow多自由度仿鸟扑翼飞行器气动仿真[J].系统仿真学报,2018,30(6):2162-2167.
YANG Y G, SU H P. Aerodynamic simulation of multi-DOF flapping-wing air vehicle of bird-like based on XFlow software[J]. Journal of System Simulation, 2018, 30(6): 2162-2167.
|
| 17 |
HAN S L, YU R X, LI Z Y, et al. Effect of turbulence model on simulation of vehicle aerodynamic characteristics based on XFlow[J]. Applied Mechanics and Materials, 2013, 457-458: 1571-1574.
|
| 18 |
LIU Y H, FANG P P, BIAN D D, et al. Fuzzy comprehensive evaluation for the motion performance of autonomous underwater vehicle[J]. Ocean Engineering, 2014, 88: 568-577.
|
| 19 |
许伦辉,吴攀,黄宝山.基于XFlow软件的双体游艇阻力准确性分析[J].船舶标准化工程师,2019,52(4):50-56. doi:10.14141/j.31-1981.2019.04.011
XU L H, WU P, HUANG B S. Accuracy analysis in the resistance of catamaran based on XFlow software[J]. Ship Standardization Engineer, 2019, 52(4): 50-56.
doi: 10.14141/j.31-1981.2019.04.011
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|