| 机器人与机构设计 |
|

|
|
|
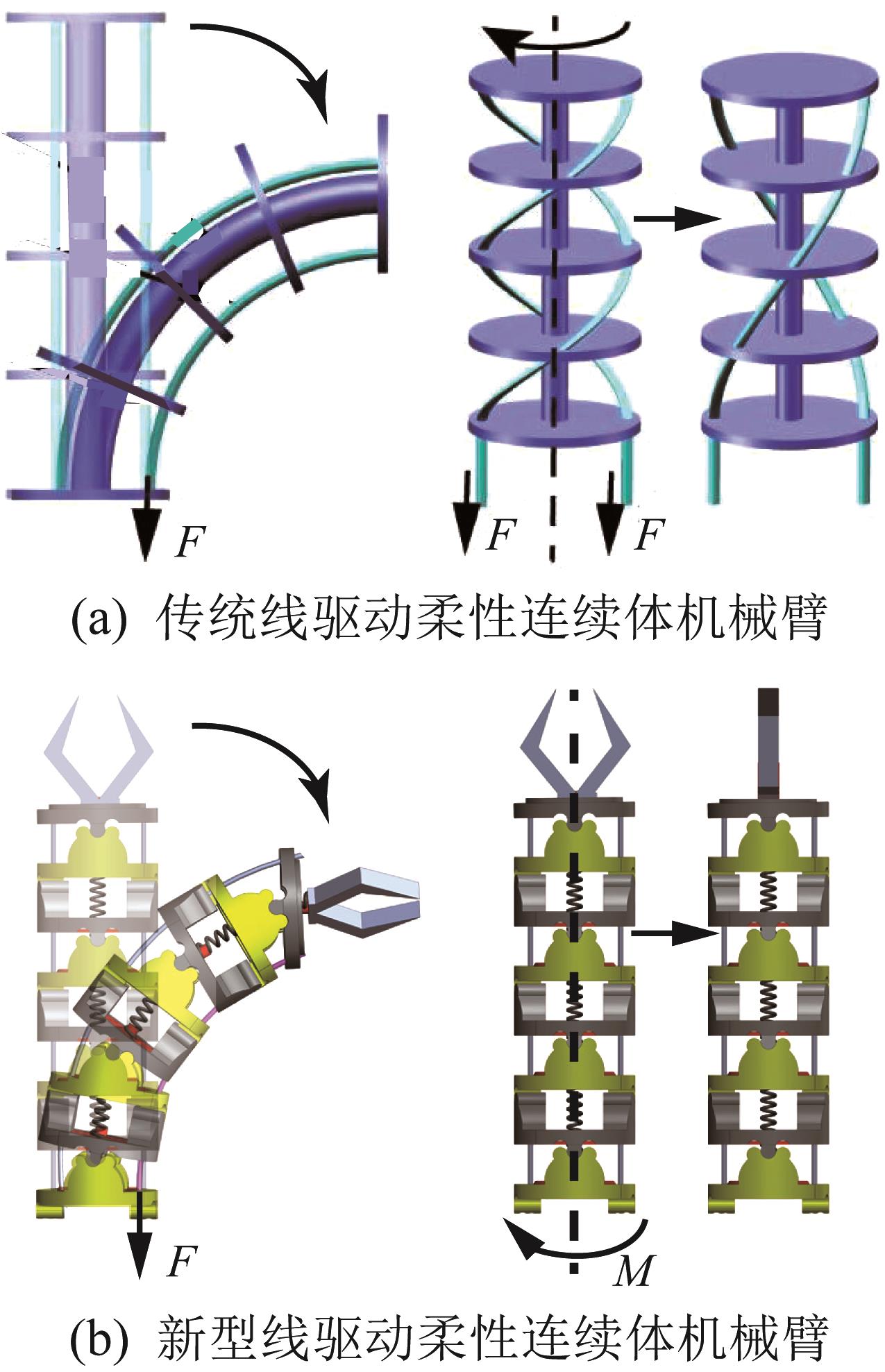
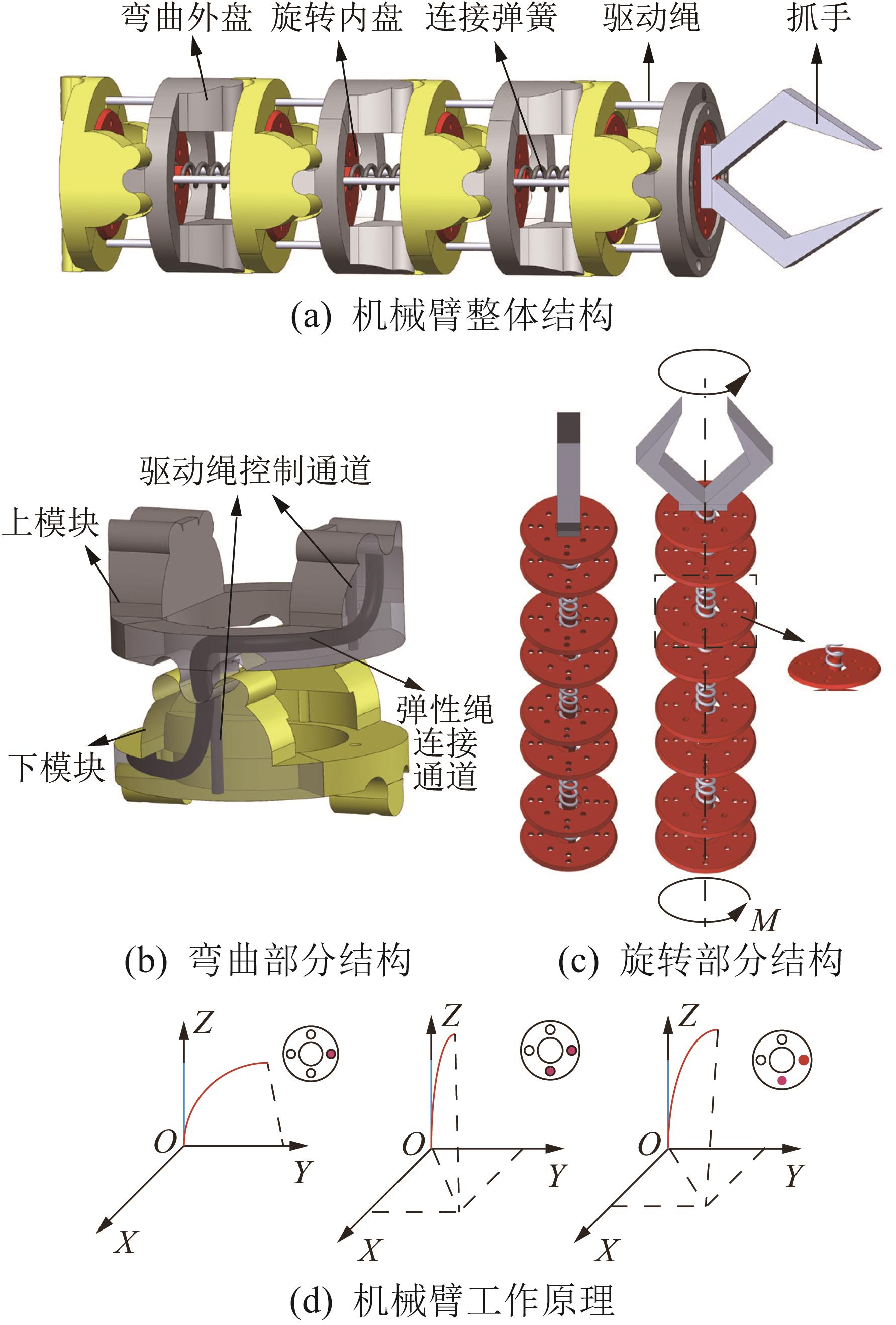
| 基于滚动接触的单模块多自由度柔性连续体机械臂设计 |
周亮( ),温涛,胡俊峰(),周浩 ),温涛,胡俊峰(),周浩 |
| 江西理工大学 机电工程学院,江西 赣州 341000 |
|
| Design of single-module multi-degree-of-freedom flexible continuum robotic arm based on rolling contact |
| Liang ZHOU(),Tao WEN,Junfeng HU(),Hao ZHOU |
| School of Mechanical and Electrical Engineering, Jiangxi University of Science and Technology, Ganzhou 341000, China |
引用本文:
周亮,温涛,胡俊峰,周浩. 基于滚动接触的单模块多自由度柔性连续体机械臂设计[J]. 工程设计学报, 2024, 31(4): 473-482.
Liang ZHOU,Tao WEN,Junfeng HU,Hao ZHOU. Design of single-module multi-degree-of-freedom flexible continuum robotic arm based on rolling contact[J]. Chinese Journal of Engineering Design, 2024, 31(4): 473-482.
链接本文:
https://www.zjujournals.com/gcsjxb/CN/10.3785/j.issn.1006-754X.2024.03.214
或
https://www.zjujournals.com/gcsjxb/CN/Y2024/V31/I4/473
|
| 1 |
朱文斌,李俊,杨进兴,等.基于重力补偿与滤波模型的工业机械臂打磨技术的研究[J].工业控制计算机,2021,34(8):67-69. doi:10.3969/j.issn.1001-182X.2021.08.024
ZHU W B, LI J, YANG J X, et al. Research on polishing technology of industrial mechanical ARM based on gravity compensation and filter model[J]. Industrial Control Computer, 2021, 34(8): 67-69.
doi: 10.3969/j.issn.1001-182X.2021.08.024
|
| 2 |
莫柠锴.面向机械臂抓取应用的高精度目标6D位姿估计[D].深圳:中国科学院大学(中国科学院深圳先进技术研究院),2021.
MO N K. High-precision 6D pose estimation for manipulator grasping[D]. Shenzhen: University of Chinese Academy of Sciences (Shenzhen Institute of Advanced Technology,Chinese Academy of Sciences), 2021.
|
| 3 |
杨文龙.面向单孔腔镜手术的连续型机械臂及其运动建模的研究[D].哈尔滨:哈尔滨工业大学,2016.
YANG W L. Research on kinematic modeling of a continuum manipulator for signle port access laparoscopy surgery[D]. Harbin: Harbin Institute of Technology, 2016.
|
| 4 |
耿浩.面向狭小空间作业的绳驱超冗余机械臂结构设计与研究[D].沈阳:沈阳工业大学,2021.
GENG H. Structure design and research of rope driven hyper-redundant manipulator for narrow space operation[D]. Shenyang: Shenyang University of Technology, 2021.
|
| 5 |
牟宗高.面向狭小空间作业的超冗余机器人轨迹规划及控制研究[D].哈尔滨:哈尔滨工业大学,2017.
MOU Z G. Research on trajectory planning and control of hyper-redundant robots for confined-space operations[D]. Harbin: Harbin Institute of Technology, 2017.
|
| 6 |
刘天亮.面向狭小空间作业的绳索驱动超冗余机械臂的研究[D].哈尔滨:哈尔滨工业大学,2016. doi:10.18869/acadpub.jafm.68.236.25086
LIU T L. A study on the cable-driven and hyper redundant manipulator for the narrow space operations[D]. Harbin: Harbin Institute of Technology, 2016.
doi: 10.18869/acadpub.jafm.68.236.25086
|
| 7 |
朱晓俊,王学谦,马云萱,等.绳驱超冗余空间柔性机械臂遥操作系统设计与实验研究[J].机器人,2022,44(1):9-18. doi:10.13973/j.cnki.robot.210228
ZHU X J, WANG X Q, MA Y X, et al. Design and experimental study on the teleoperation system for cable-driven and hyper-redundant space flexible manipulator[J]. Robot, 2022, 44(1): 9-18.
doi: 10.13973/j.cnki.robot.210228
|
| 8 |
符海明.面向空间应用的连续型绳驱柔性机械臂设计[D]. 哈尔滨:哈尔滨工业大学,2019.
FU H M. Design of continuous flexible cable-driven manipulator for outer space application[D]. Harbin: Harbin Institute of Technology, 2019.
|
| 9 |
王剑,李成刚,岳云双,等.面向航天器零部件装配的机械臂混合控制策略[J].航空科学技术,2022,33(2):90-96.
WANG J, LI C G, YUE Y S, et al. Hybrid control strategy of manipulator for spacecraft component assembly[J]. Aeronautical Science & Technology, 2022, 33(2): 90-96.
|
| 10 |
RICH S I, WOOD R J, MAJIDI C. Untethered soft robotics[J]. Nature Electronics, 2018, 1: 102-112.
|
| 11 |
MANTI M, CACUCCIOLO V, CIANCHETTI M. Stiffening in soft robotics: a review of the state of the art[J]. IEEE Robotics & Automation Magazine, 2016, 23(3): 93-106.
|
| 12 |
HAWKES E W, BLUMENSCHEIN L H, GREER J D, et al. A soft robot that navigates its environment through growth[J]. Science Robotics, 2017, 2(8): eaan3028.
|
| 13 |
MORIMOTO Y, ONOE H, TAKEUCHI S. Biohybrid robot powered by an antagonistic pair of skeletal muscle tissues[J]. Science Robotics, 2017, 3(18): eaat4440.
|
| 14 |
WANG M F, PALMER D, DONG X, et al. Design and development of a slender dual-structure continuum robot for in-situ aeroengine repair[C]//2018 IEEE/RSJ International Conference on Intelligent Robots and Systems. Madrid, Oct. 1-5, 2018.
|
| 15 |
HALVERSON P A, HOWELL L L, MAGLEBY S P. Tension-based multi-stable compliant rolling-contact elements[J]. Mechanism and Machine Theory, 2010, 45(2): 147-156.
|
| 16 |
HANNAN M W, WALKER I D. Kinematics and the implementation of an elephant’s trunk manipulator and other continuum style robots[J]. Journal of Robotic Systems, 2003, 20(2): 45-63.
|
| 17 |
MORALES BIEZE T, KRUSZEWSKI A, CARREZ B, et al. Design, implementation, and control of a deformable manipulator robot based on a compliant spine[J]. The International Journal of Robotics Research, 2020, 39(14): 1604-1619.
|
| 18 |
牛景达.具有旋转运动的连续体机械臂设计及性能分析 [D].赣州:江西理工大学,2022:3-40.
NIU J D. Design and performance analysis of continuum manipulator with rotating motion[D]. Ganzhou: Jiangxi University of Science and Technology, 2022: 3-40.
|
| 19 |
WALKER I D, DAWSON D M, FLASH T, et al. Continuum robot arms inspired by cephalopods[C]//Proceedings Volume 5804, Unmanned Ground Vehicle Technology VII. Orlando, Florida, May 27, 2005.
|
| 20 |
McMAHAN W, JONES B A, WALKER I D. Design and implementation of a multi-section continuum robot: Air-Octor[C]//2005 IEEE/RSJ International Conference on Intelligent Robots and Systems. Edmonton, AB, Aug. 2-6, 2005.
|
| 21 |
McMAHAN W, CHITRAKARAN V, CSENCSITS M, et al. Field trials and testing of the OctArm continuum manipulator[C]//Proceedings of the 2006 IEEE International Conference on Robotics and Automation. Orlando, FL, May 15-19, 2006.
|
| 22 |
CHEN X Q, ZHANG X, LIU H, et al. Design and development of a soft robotic manipulator[J]. International Journal of Mechanics and Materials in Design, 2020, 16(2): 309-321.
|
| 23 |
ZHANG Z, TANG S J, FAN W C, et al. Design and analysis of hybrid-driven origami continuum robots with extensible and stiffness-tunable sections[J]. Mechanism and Machine Theory, 2022, 169: 104607.
|
| 24 |
MONTIERTH J R, TODD R H, HOWELL L L. Analysis of elliptical rolling contact joints in compression[J]. Journal of Mechanical Design, 2011, 133(3): 031001.
|
| 25 |
KIM Y J, CHENG S B, KIM S, et al. A stiffness-adjustable hyperredundant manipulator using a variable neutral-line mechanism for minimally invasive surgery[J]. IEEE Transactions on Robotics, 2014, 30(2): 382-395.
|
| 26 |
KIMURA N, IWATSUKI N. Spatial rolling contact pair generating the specified relative motion between links[M]//Lecture Notes in Electrical Engineering. Singapore: Springer Singapore, 2016: 307-316.
|
| 27 |
SUH J, KIM K, JEONG J, et al. Design considerations for a hyper-redundant pulleyless rolling joint with elastic fixtures[J]. IEEE/ASME Transactions on Mechatronics, 2015, 20(6): 2841-2852.
|
| 28 |
董栋.基于滚动接触的机器人设计与运动分析[D].赣州:江西理工大学,2023.
DONG D. Design and motion analysis of continuous robot based on rolling contact[D]. Ganzhou: Jiangxi University of Science and Technology, 2023.
|
| 29 |
JONES B A, WALKER I D. Kinematics for multisection continuum robots[J]. IEEE Transactions on Robotics, 2006, 22(1): 43-55.
|
| 30 |
CHAWLA A. FRAZELLE C, WALKER I. A comparison of constant curvature forward kinematics for multisection continuum manipulators[C]//2018 Second IEEE International Conference on Robotic Computing (IRC). Laguna Hills, CA, Jan. 31-Feb. 2, 2018.
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|