| 机器人与机构设计 |
|

|
|
|
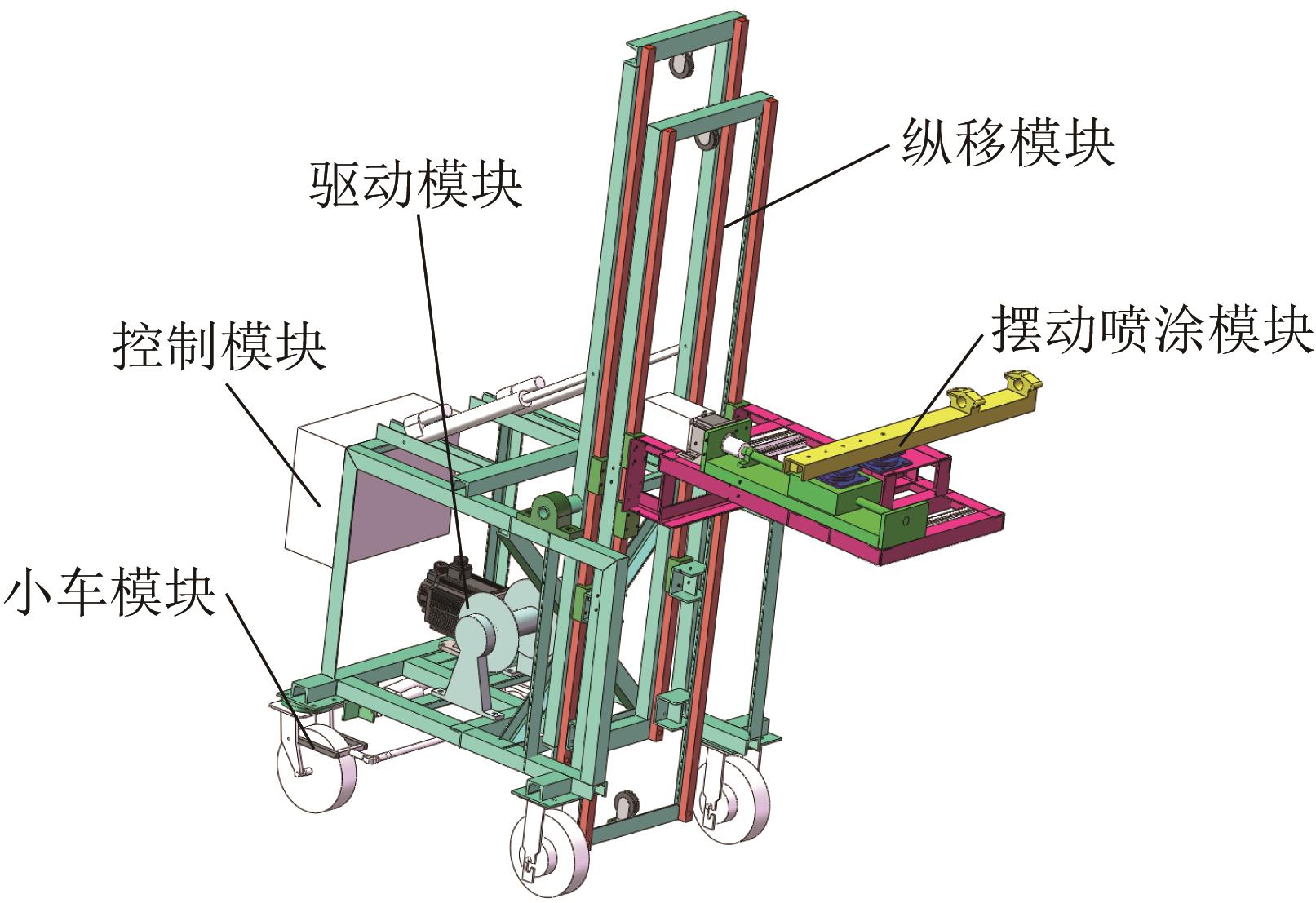
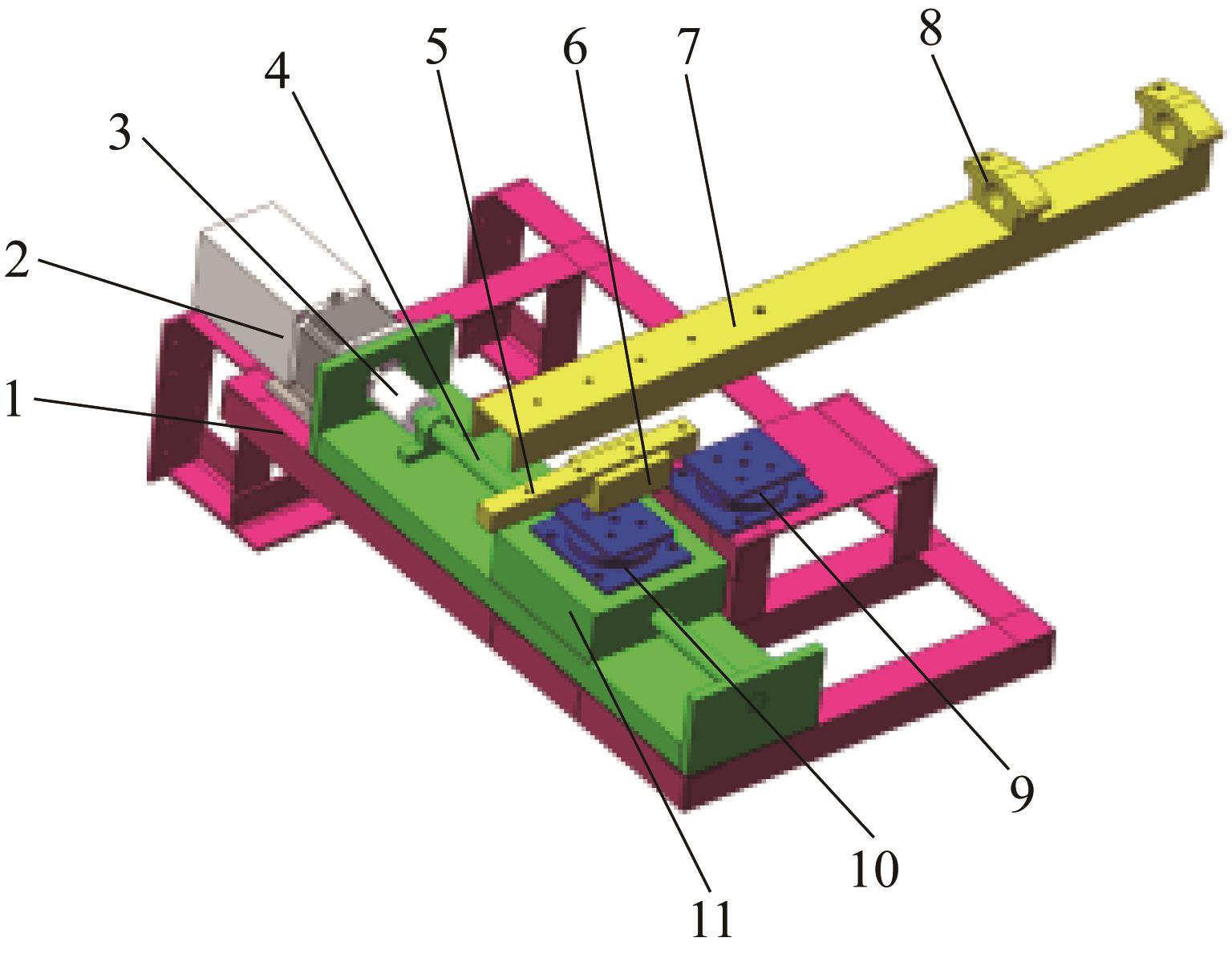
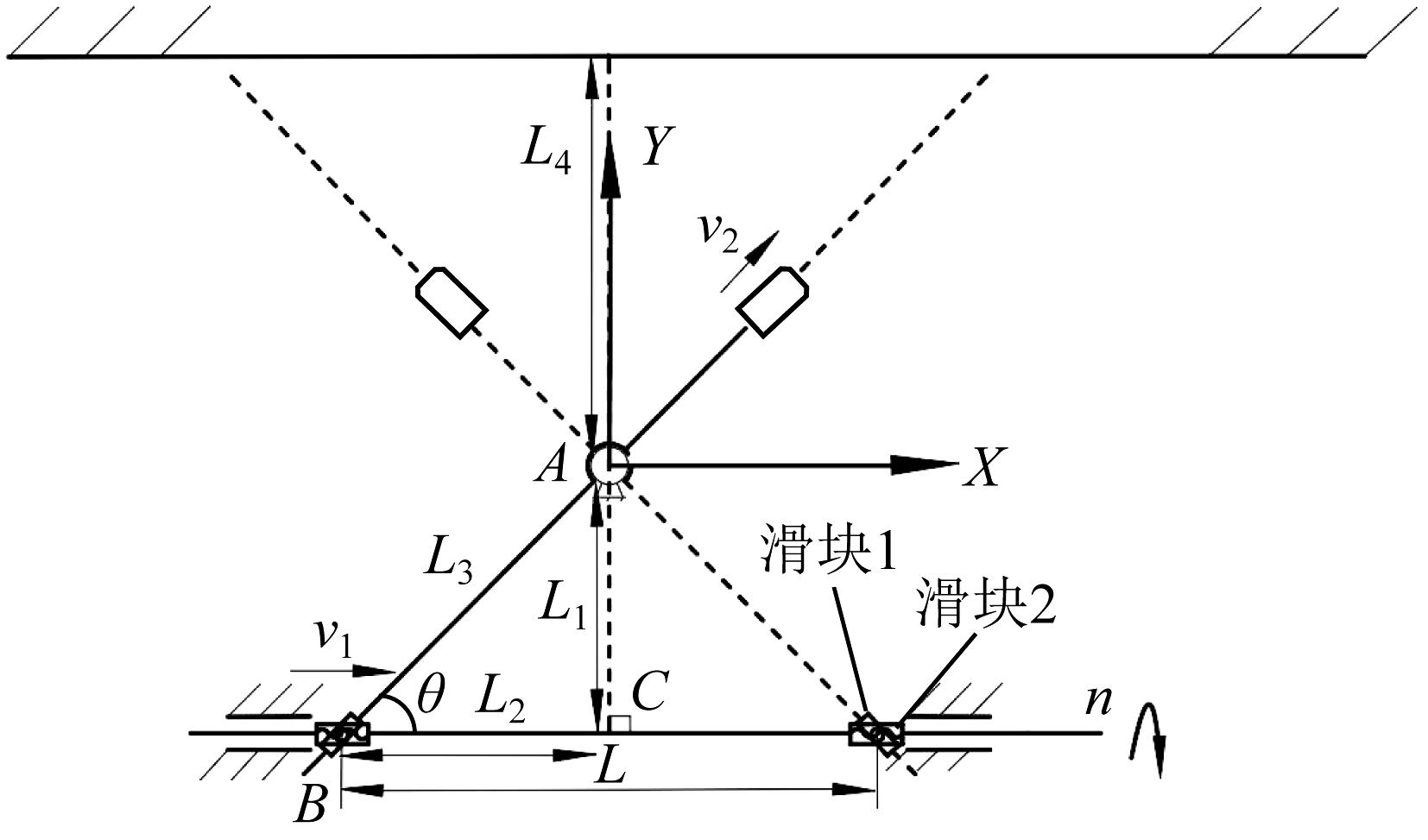
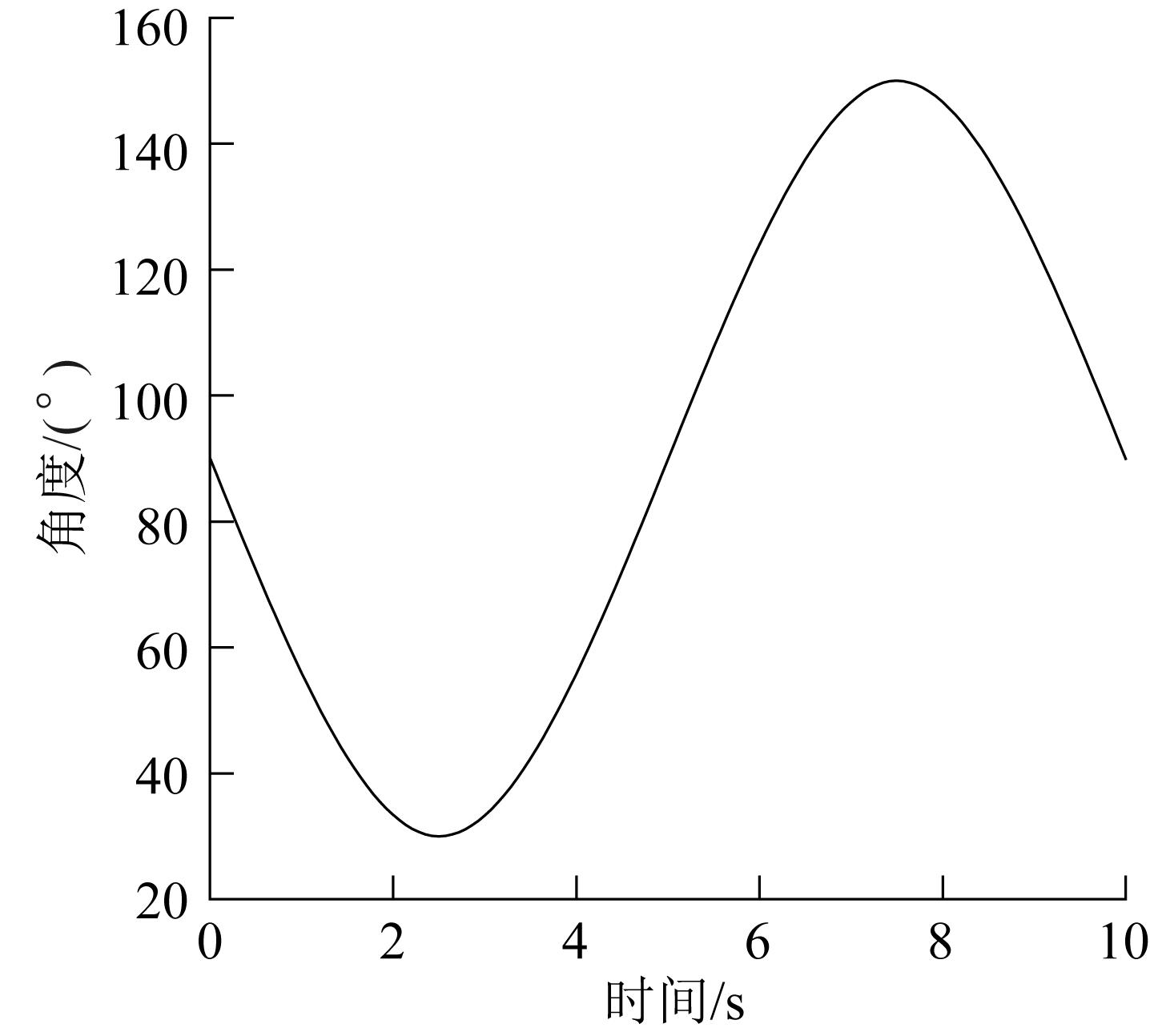
| 抹灰机摆动喷涂机构创新设计与分析 |
李新革1( ),廖红玉1,周敏2,3(),陈萌萌2,3,谢良喜2,3 ),廖红玉1,周敏2,3(),陈萌萌2,3,谢良喜2,3 |
1.中国一冶集团有限公司,湖北 武汉 430080
2.武汉科技大学 冶金装备及其控制教育部重点实验室,湖北 武汉 430081
3.武汉科技大学 机械传动与制造工程湖北省重点实验室,湖北 武汉 430081 |
|
| Innovative design and analysis of swinging spraying mechanism of plastering machine |
| Xinge LI1(),Hongyu LIAO1,Min ZHOU2,3(),Mengmeng CHEN2,3,Liangxi XIE2,3 |
1.China First Metallurgical Group Co. , Ltd. , Wuhan 430080, China
2.Key Laboratory of Metallurgical Equipment and Control of Ministry of Education, Wuhan University of Science and Technology, Wuhan 430081, China
3.Hubei Provincial Key Laboratory of Mechanical Transmission and Manufacturing Engineering, Wuhan University of Science and Technology, Wuhan 430081, China |
引用本文:
李新革,廖红玉,周敏,陈萌萌,谢良喜. 抹灰机摆动喷涂机构创新设计与分析[J]. 工程设计学报, 2024, 31(2): 248-253.
Xinge LI,Hongyu LIAO,Min ZHOU,Mengmeng CHEN,Liangxi XIE. Innovative design and analysis of swinging spraying mechanism of plastering machine[J]. Chinese Journal of Engineering Design, 2024, 31(2): 248-253.
链接本文:
https://www.zjujournals.com/gcsjxb/CN/10.3785/j.issn.1006-754X.2024.03.182
或
https://www.zjujournals.com/gcsjxb/CN/Y2024/V31/I2/248
|
| 1 |
史丽晨,梁国强,贠志达,等. LS-Dyna中墙面抹灰机振动压实过程仿真分析[J]. 机械设计与制造, 2018, 35(4): 179-182. doi:10.3969/j.issn.1001-3997.2018.04.052
SHI L C, LIANG G Q, YUN Z D, et al. Simulation and analysis of vibration compaction process of wall coated aircraft in LS-Dyna [J]. Machinery Design and Manufacture, 2018, 35(4): 179-182.
doi: 10.3969/j.issn.1001-3997.2018.04.052
|
| 2 |
龙腾,李恩,方灶军,等.智能墙面抹灰机的类型及关键技术研究进展[J].山东建筑大学学报, 2015, 30(1): 65-70. doi:10.3969/j.issn.1673-7644.2015.01.012
LONG T, LI E, FANG Z J, et al. Research progress on the types and key technologies of intelligent wall coating aircraft [J]. Journal of Shandong Jianzhu University, 2015, 30(1): 65-70.
doi: 10.3969/j.issn.1673-7644.2015.01.012
|
| 3 |
刘延俊,赵敬伟,孔祥臻.半自动抹灰机的气动系统设计[J]. 机床与液压, 2004(11): 107-107,172. doi:10.3969/j.issn.1001-3881.2004.11.040
LIU Y J, ZHAO J W, KONG X Z. Design of pneumatic system for mortar coating aircraft on semi-building wall [J]. Machine Tool & Hydraulics, 2004(11): 107-107, 172.
doi: 10.3969/j.issn.1001-3881.2004.11.040
|
| 4 |
冯爱华,范春起.室内墙壁用差动抹灰机研究[J]. 施工技术, 2014(9): 95-98. doi:10.7672/sgjs2014090095
FENG A H, FAN C Q. Research on differential wiping aircraft for interior walls[J]. Construction Technology, 2014(9): 95-98.
doi: 10.7672/sgjs2014090095
|
| 5 |
刘维忠,谢守勇,王靖.智能墙体抹灰机研究[J]. 重庆建筑, 2012, 11(4): 47-48. doi:10.3969/j.issn.1671-9107.2012.04.047
LIU W Z, XIE S Y, WANG J. Research on intelligent wall coating aircraft [J]. Chongqing Architecture, 2012, 11(4): 47-48.
doi: 10.3969/j.issn.1671-9107.2012.04.047
|
| 6 |
杨振宇,巩传根,刘芝霞,等. 新型抹灰机的设计[J]. 建筑机械,2007,27(8):84-85,89. doi:10.3969/j.issn.1001-554X.2007.08.026
YANG Z Y, GONG C G, LIU Z X, et al. Design of new erasing aircraft[J]. Construction Machinery, 2007, 27(8): 84-85, 89.
doi: 10.3969/j.issn.1001-554X.2007.08.026
|
| 7 |
孟宪举,王凯,张莹,等. 抹灰机抹灰装置的设计与动力仿真分析[J]. 建筑技术,2015,46():85-87. doi:10.3969/j.issn.1000-4726.2015.z1.025
MENG X J, WANG K, ZHANG Y, et al. Design and dynamic simulation analysis of aircraft plastering device [J]. Building Technology, 2015, 46(): 85-87.
doi: 10.3969/j.issn.1000-4726.2015.z1.025
|
| 8 |
王莹,谢守勇,王靖. 一种新型抹灰机的设计和仿真[J].西南师范大学学报(自然科学版),2012,37(11):112-115. doi:10.3969/j.issn.1000-5471.2012.11.022
WANG Y, XIE S Y, WANG J. Design and simulation of a new type of erasing aircraft [J]. Journal of Southwest Normal University (Natural Science Edition), 2012, 37(11): 112-115.
doi: 10.3969/j.issn.1000-5471.2012.11.022
|
| 9 |
WANG Y, XIE L X, WANG H, et al. Intelligent spraying robot for building walls with mobility and perception [J]. Automation in Construction, 2022, 139(6): 1-12.
|
| 10 |
孔令盼,周敏,付婷,等.自动抹墙机异形喷嘴流场分析与结构优化[J]. 现代制造工程,2018(3):149-153, 35. doi:10.16731/j.cnki.1671-3133.2018.03.027
KONG L P, ZHOU M, FU T, et al. Flow field analysis and structure optimization of irregular nozzle of automatic wall plater [J]. Modern Manufacturing Engineering, 2018(3): 149-153, 35.
doi: 10.16731/j.cnki.1671-3133.2018.03.027
|
| 11 |
廖红玉,邓梦洋,周敏,等. 基于钢丝绳传动的自动抹灰机的轻量化设计[J].工程设计学报,2022, 29(2): 196-201. doi:10.3785/j.issn.1006-754X.2022.00.018
LIAO H Y, DENG M Y, ZHOU M, et al. Lightweight design of automatic spreader aircraft based on wire rope drive [J]. Chinese Journal of Engineering Design, 2022, 29(2): 196-201.
doi: 10.3785/j.issn.1006-754X.2022.00.018
|
| 12 |
赵世田,付莹莹,卢倩,等.基于Creo和ADAMS的弧面分度凸轮机构建模与运动仿真研究[J]. 机械设计与制造, 2020(4): 111-114. doi:10.3969/j.issn.1001-3997.2020.04.027
ZHAO S T, FU Y Y, LU Q, et al. Modeling and motion simulation of globoidal indexing CAM mechanism based on Creo and ADAMS [J]. Machinery Design & Manufacture, 2020(4): 111-114.
doi: 10.3969/j.issn.1001-3997.2020.04.027
|
| 13 |
黄慧娟,欧阳凯,胡鹏浩,等.基于ADAMS的3-PUU并联机构坐标测量机的轨迹规划及仿真[J]. 制造业自动化,2019, 41(10): 26-29, 38. doi:10.3969/j.issn.1009-0134.2019.10.006
HUANG H J, OUYANG K, HU P H, et al. Trajectory planning and simulation of 3-PUU parallel mechanism coordinate measuring machine based on ADAMS [J]. Manufacturing Automation, 2019, 41(10): 26-29, 38.
doi: 10.3969/j.issn.1009-0134.2019.10.006
|
| 14 |
徐诗洋,吴炳晖,纪冬梅,等.电力隧道自动巡检机器人设计与运动仿真[J]. 工程设计学报, 2023, 30(1): 32-38. doi:10.3785/j.issn.1006-754X.2023.00.009
XU S Y, WU B H, JI D M, et al. Design and motion simulation of automatic inspection robot for power tunnel [J]. Chinese Journal of Engineering Design, 2023, 30(1): 32-38.
doi: 10.3785/j.issn.1006-754X.2023.00.009
|
| 15 |
王立新,万卓,李晶,等.基于ADAMS的混匀仪振动系统优化分析[J]. 机械设计与制造, 2023, 389(7): 187-191. doi:10.3969/j.issn.1001-3997.2023.07.038
WANG L X, WAN Z, LI J, et al. Optimization analysis of vibration system of mixer based on ADAM [J]. Mechanical Design and Manufacturing, 2023, 389(7): 187-191.
doi: 10.3969/j.issn.1001-3997.2023.07.038
|
| 16 |
何富君,李浩,张瑞杰,等. 储罐爬壁机器人的喷漆机构设计及ADAMS仿真[J]. 制造业自动化, 2013(21): 107-110. doi:10.3969/j.issn.1009-0134.2013.21.031
HE F J, LI H, ZHANG R J, et al. Spray paintingmechanism design and ADAMS simulate-on of tank wall climbing robot [J]. Manufacturing Automation, 2013(21): 107-110.
doi: 10.3969/j.issn.1009-0134.2013.21.031
|
| 17 |
徐静,张志强,马凤仪.基于纸箱包装生产线的纸箱预封装置设计[J]. 包装与食品机械, 2022, 40(4): 86-90. doi:10.3969/j.issn.1005-1295.2022.04.015
XU J, ZHANG Z Q, MA F Y. Design of carton pre-sealing device based on carton packaging production line [J]. Packaging and Food Machinery, 2022, 40(4): 86-90.
doi: 10.3969/j.issn.1005-1295.2022.04.015
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|