


建筑机械领域的专家学者针对建筑墙面砂浆抹灰机的结构及抹灰机械缺陷的改进已进行了较多的研究。刘延俊等[3]设计了一种半自动抹灰机,初步实现了人工操作向机械自动化施工的转变;冯爱华等[4]设计了一种室内墙壁抹灰机,运用差动轮系工作原理进行抹灰机构创新设计,不仅实现了螺旋输送供料、离心甩灰,而且实现了从砂浆抹平到压实的自动化施工过程;刘维忠等[5]设计了一种全新的智能墙体抹灰机,它不仅具备自动抹灰的功能,而且还可以通过全电子操作实现智能化;杨振宇等[6]设计了一种新型的抹灰机,将传统的灰浆喷涂升级到更加高效的直接抹灰,大大提升了墙面施工的效率;孟宪举等[7]提出了一种新型的抹灰装置,将抹灰、抹平和压实有机结合,利用机械部件的协同作用,实现了多种功能的完美结合;王莹等[8]设计并开发出一种全自动抹灰机,它能够完美地完成墙壁和阴角的抹灰工作。
1 抹灰机摆动喷涂机构设计
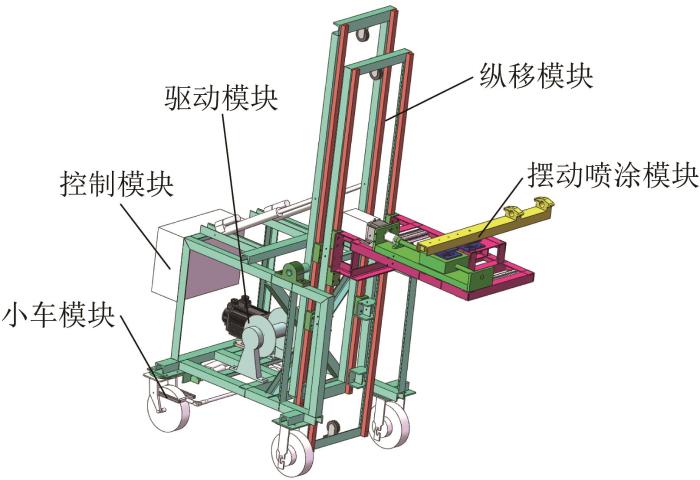
作者研发的建筑墙面砂浆抹灰机的结构如图1所示。抹灰机主要由底部移动小车模块、控制模块、驱动模块、用于升降的纵移模块和进行墙面抹灰施工的摆动喷涂模块构成。
图1
摆动喷涂机构模拟工人摆动砂浆管对墙面进行往复喷涂施工的动作,通过各个构件之间的联动作用实现往复喷涂。摆动喷涂机构的三维模型如图2所示。转盘9和转盘10模拟工人喷涂时手部关节的动作,其通过与丝杆4、滑台11、直线导轨5、滑块6的协同作用,实现摆臂摆动;滑块6通过转盘10与滑台11连接;摆臂7与转盘9均设置有连接孔,以此实现两者固定连接,且摆臂7上表面设置有与砂浆软管及砂浆喷头连接的卡箍;直线导轨5安装于摆臂7下表面,以实现直线传动。在进行墙面喷涂施工时:电机2驱动丝杆4转动,滑台11随着丝杆4的转动作往复运动,滑块6随着滑台11的运动开始沿直线导轨5滑动;摆臂7绕转盘9转动;当滑台11进行往复直线运动时,摆臂7进行往复摆动,以此实现对墙面的往复喷涂。
图2

图2
抹灰机摆动喷涂机构的三维模型
1—底座;2—电机;3—联轴器;4—丝杆;5—直线导轨;
6—滑块;7—摆臂;8—卡箍;9,10—转盘;11—滑台
Fig.2
Three-dimensional model of swinging spraying mechanism of plastering machine
2 抹灰机摆动喷涂机构运动学分析与仿真
2.1 摆动喷涂机构运动学分析
图3
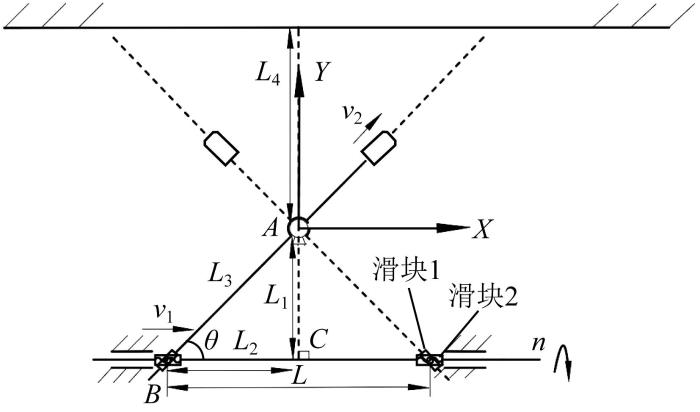
图3
抹灰机摆动喷涂机构的简图
Fig.3
Schematic diagram of swinging spraying mechanism of plastering machine
则:
对
对
采用摆动喷涂机构对墙面喷涂时,为了实现砂浆的均匀喷涂,将机构的原动件——丝杆设置为匀速旋转运动。假设喷出的砂浆均可喷涂到墙面,则砂浆在墙面沿水平方向作匀速移动,沿竖直方向作自由落体运动。
2.2 摆动喷涂机构运动仿真
2.2.1 仿真模型构建
1)丝杆与滑台之间设置为螺旋副;转盘与滑台、喷涂摆臂下侧的滑块之间都设置为旋转副;滑块与直线导轨之间设置为移动副;喷涂摆臂与支撑底座之间设置为旋转副。
2)丝杆的有效行程为300 mm,在丝杆与滑台之间的移动副上设置驱动,单个周期内的驱动函数为:IF(time-2.5:-40.0*time, -100, IF(time-7.5:40.0*(time-2.5)-100, 100, -40.0*(time-7.5)+100))。
3)设置各构件为刚体。
2.2.2 仿真结果分析
图4

图4
砂浆喷涂摆臂摆动角度的变化曲线
Fig.4
Variation curve of swing angle of mortar spraying swing arm
图5
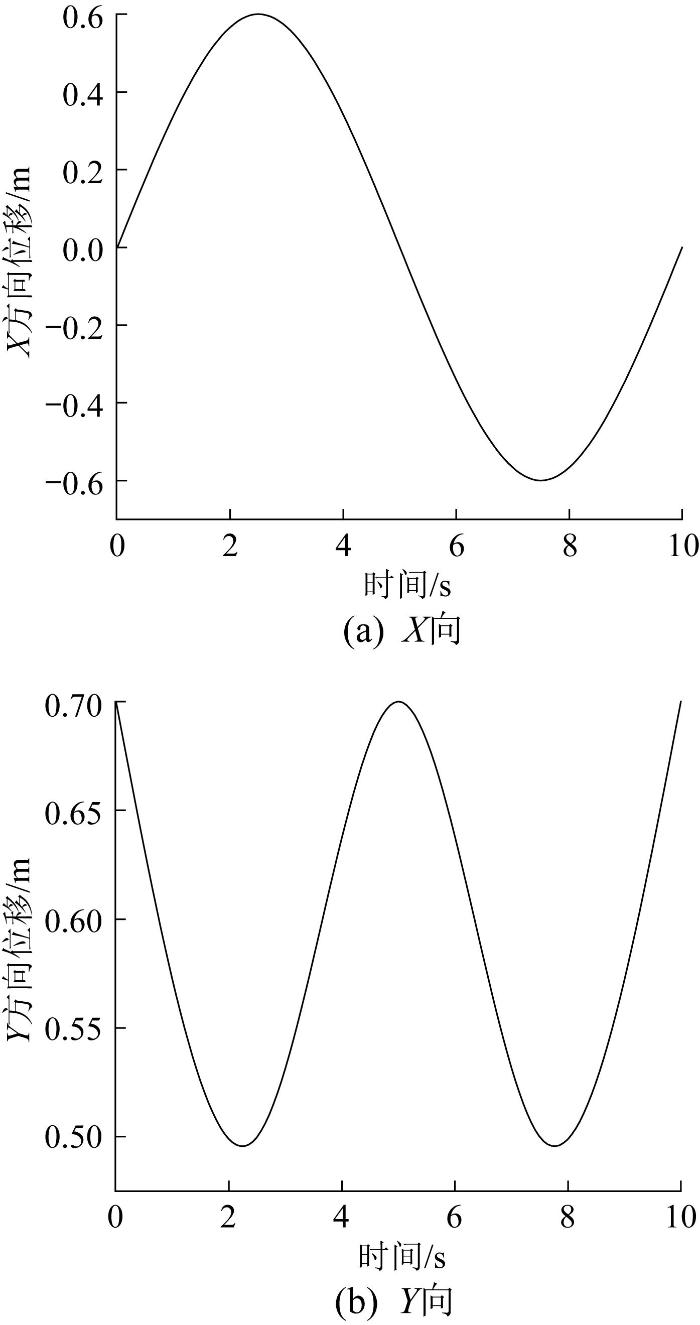
图5
砂浆喷涂摆臂摆动位移的变化曲线
Fig.5
Variation curve of swing displacement of mortar spraying swing arm swing
图6

图6
砂浆喷涂摆臂摆动角速度的变化曲线
Fig.6
Variation curve of swing angular velocity of mortar spraying swing arm
图7
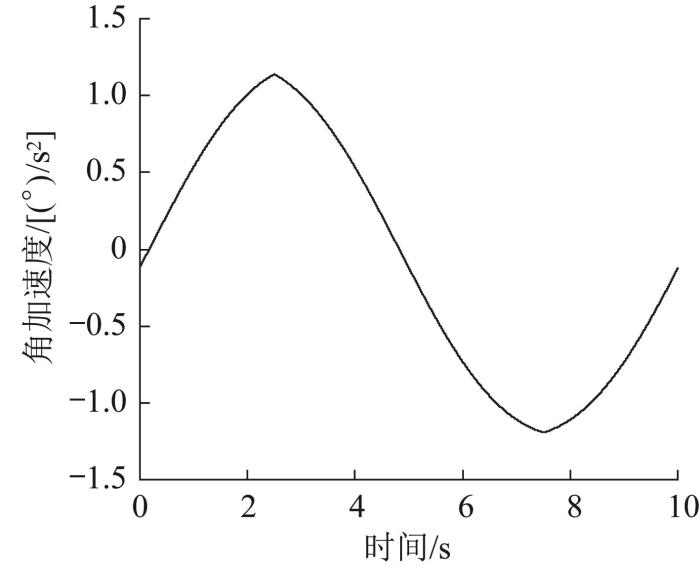
图7
砂浆喷涂摆臂摆动角加速度的变化曲线
Fig.7
Variation curve of swing angular acceleration of mortar spraying swing arm
3 砂浆轨迹分析与仿真
由上文分析可知,砂浆在墙面沿水平方向作匀速移动,沿竖直方向作自由落体运动。如图3所示,假设滑台的运动速度为
设置抹灰机的工作参数:
图8
4 砂浆喷涂实验
图9

表1 抹灰机的相关参数
Table 1
| 参数 | 数值 |
|---|---|
| 摆臂摆动中心与墙面的距离/m | 1.2 |
| 丝杆滑台有效行程/m | 0.3 |
| 砂浆轨迹纵移间距/m | 0.1 |
| 滑台往复运行时间/s | 14.0 |
实验中采用“行程渐增式”喷涂路径,最终得到的砂浆喷涂实验效果如图10所示。实验表明:
图10

1)所设计的摆动喷涂机构结构简单,运行稳定,能满足建筑墙面砂浆喷涂施工要求。
2)喷涂后,墙面上的砂浆分布连续且均匀,砂浆轨迹间距合理,墙面砂浆喷涂质量较好,从而为后续的砂浆抹平工序奠定了基础。
5 结 论
1)对上一代建筑墙面砂浆抹灰机的摆动喷涂机构进行优化设计。通过简单动力源实现建筑墙面砂浆的摆动喷涂,设计出了机体结构简单、施工性能可靠的砂浆喷涂机构。
2)采用SolidWorks软件建立了抹灰机三维模型,采用ADAMS软件对喷涂机构进行运行仿真,得到了砂浆喷涂摆臂的角速度和角加速度变化曲线,分析了其砂浆喷涂施工时的运行状态。
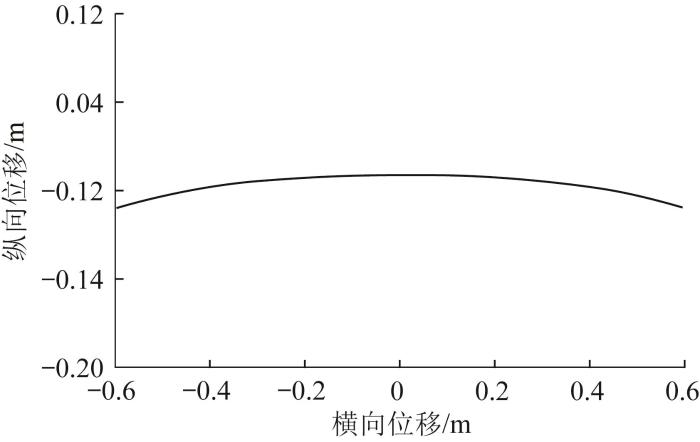
3)通过仿真得到砂浆轨迹,当砂浆横向移动距离为1.20 m时,纵向移动距离为0.03 m,砂浆轨迹趋近于一条直线;通过砂浆喷涂实验可知,当丝杆匀速旋转时,可实现砂浆沿墙面水平方向的匀速喷涂,验证了该机构能够满足砂浆喷涂施工要求。
参考文献
LS-Dyna中墙面抹灰机振动压实过程仿真分析
[J].DOI:10.3969/j.issn.1001-3997.2018.04.052 [本文引用: 1]
Simulation and analysis of vibration compaction process of wall coated aircraft in LS-Dyna
[J].DOI:10.3969/j.issn.1001-3997.2018.04.052 [本文引用: 1]
智能墙面抹灰机的类型及关键技术研究进展
[J].DOI:10.3969/j.issn.1673-7644.2015.01.012 [本文引用: 1]
Research progress on the types and key technologies of intelligent wall coating aircraft
[J].DOI:10.3969/j.issn.1673-7644.2015.01.012 [本文引用: 1]
半自动抹灰机的气动系统设计
[J].DOI:10.3969/j.issn.1001-3881.2004.11.040 [本文引用: 1]
Design of pneumatic system for mortar coating aircraft on semi-building wall
[J].DOI:10.3969/j.issn.1001-3881.2004.11.040 [本文引用: 1]
室内墙壁用差动抹灰机研究
[J].DOI:10.7672/sgjs2014090095 [本文引用: 1]
Research on differential wiping aircraft for interior walls
[J].DOI:10.7672/sgjs2014090095 [本文引用: 1]
智能墙体抹灰机研究
[J].DOI:10.3969/j.issn.1671-9107.2012.04.047 [本文引用: 1]
Research on intelligent wall coating aircraft
[J].DOI:10.3969/j.issn.1671-9107.2012.04.047 [本文引用: 1]
新型抹灰机的设计
[J].DOI:10.3969/j.issn.1001-554X.2007.08.026 [本文引用: 1]
Design of new erasing aircraft
[J].DOI:10.3969/j.issn.1001-554X.2007.08.026 [本文引用: 1]
抹灰机抹灰装置的设计与动力仿真分析
[J].DOI:10.3969/j.issn.1000-4726.2015.z1.025 [本文引用: 1]
Design and dynamic simulation analysis of aircraft plastering device
[J].DOI:10.3969/j.issn.1000-4726.2015.z1.025 [本文引用: 1]
一种新型抹灰机的设计和仿真
[J].DOI:10.3969/j.issn.1000-5471.2012.11.022 [本文引用: 1]
Design and simulation of a new type of erasing aircraft
[J].DOI:10.3969/j.issn.1000-5471.2012.11.022 [本文引用: 1]
Intelligent spraying robot for building walls with mobility and perception
[J].
自动抹墙机异形喷嘴流场分析与结构优化
[J].DOI:10.16731/j.cnki.1671-3133.2018.03.027
Flow field analysis and structure optimization of irregular nozzle of automatic wall plater
[J].DOI:10.16731/j.cnki.1671-3133.2018.03.027
基于钢丝绳传动的自动抹灰机的轻量化设计
[J].DOI:10.3785/j.issn.1006-754X.2022.00.018 [本文引用: 1]
Lightweight design of automatic spreader aircraft based on wire rope drive
[J].DOI:10.3785/j.issn.1006-754X.2022.00.018 [本文引用: 1]
基于Creo和ADAMS的弧面分度凸轮机构建模与运动仿真研究
[J].DOI:10.3969/j.issn.1001-3997.2020.04.027 [本文引用: 1]
Modeling and motion simulation of globoidal indexing CAM mechanism based on Creo and ADAMS
[J].DOI:10.3969/j.issn.1001-3997.2020.04.027 [本文引用: 1]
基于ADAMS的3-PUU并联机构坐标测量机的轨迹规划及仿真
[J].DOI:10.3969/j.issn.1009-0134.2019.10.006 [本文引用: 1]
Trajectory planning and simulation of 3-PUU parallel mechanism coordinate measuring machine based on ADAMS
[J].DOI:10.3969/j.issn.1009-0134.2019.10.006 [本文引用: 1]
电力隧道自动巡检机器人设计与运动仿真
[J].DOI:10.3785/j.issn.1006-754X.2023.00.009
Design and motion simulation of automatic inspection robot for power tunnel
[J].DOI:10.3785/j.issn.1006-754X.2023.00.009
基于ADAMS的混匀仪振动系统优化分析
[J].DOI:10.3969/j.issn.1001-3997.2023.07.038 [本文引用: 1]
Optimization analysis of vibration system of mixer based on ADAM
[J].DOI:10.3969/j.issn.1001-3997.2023.07.038 [本文引用: 1]
储罐爬壁机器人的喷漆机构设计及ADAMS仿真
[J].DOI:10.3969/j.issn.1009-0134.2013.21.031 [本文引用: 1]
Spray paintingmechanism design and ADAMS simulate-on of tank wall climbing robot
[J].DOI:10.3969/j.issn.1009-0134.2013.21.031 [本文引用: 1]
基于纸箱包装生产线的纸箱预封装置设计
[J].DOI:10.3969/j.issn.1005-1295.2022.04.015 [本文引用: 1]
Design of carton pre-sealing device based on carton packaging production line
[J].DOI:10.3969/j.issn.1005-1295.2022.04.015 [本文引用: 1]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}