| 机器人与机构设计 |
|


|
|
|
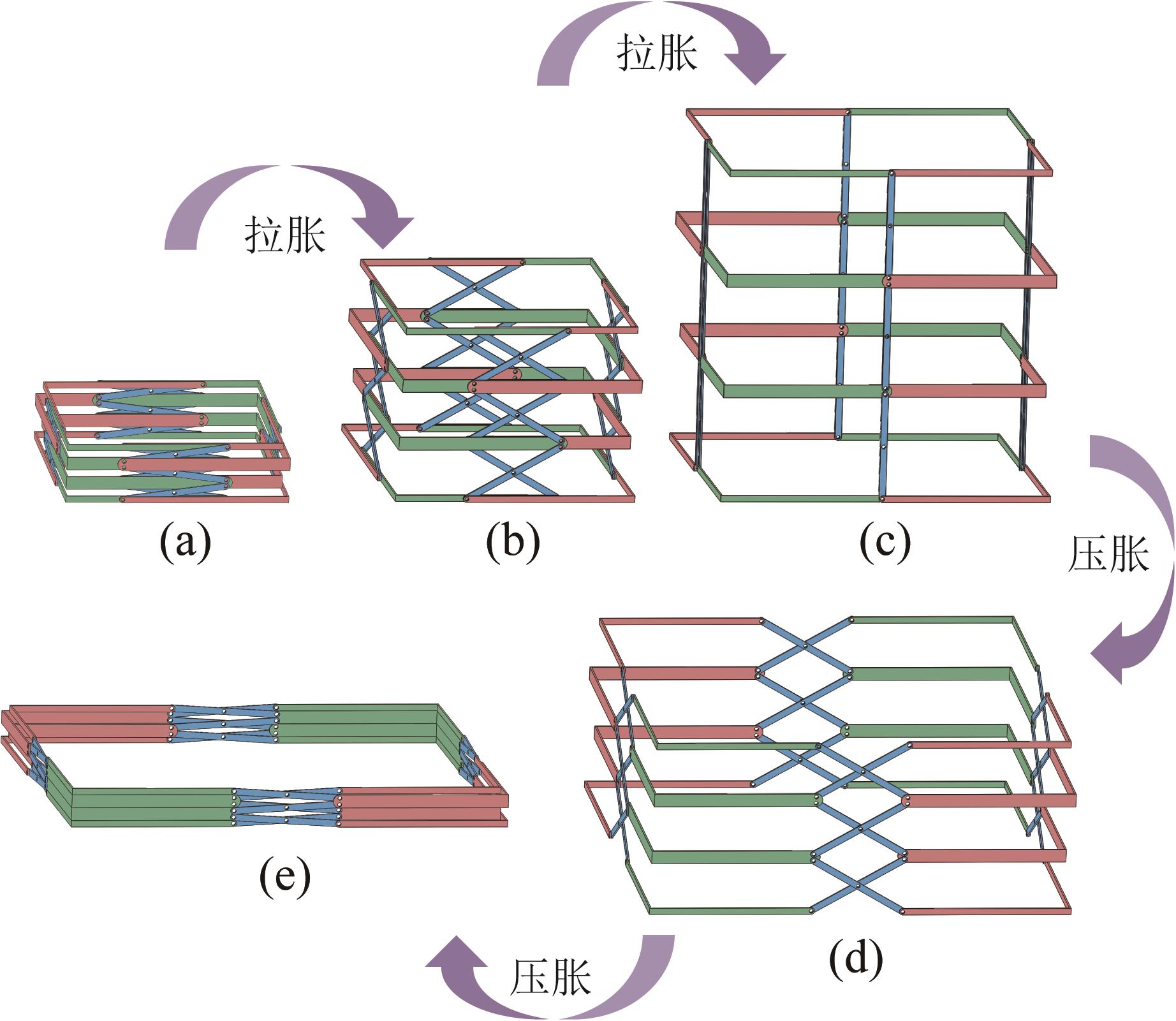
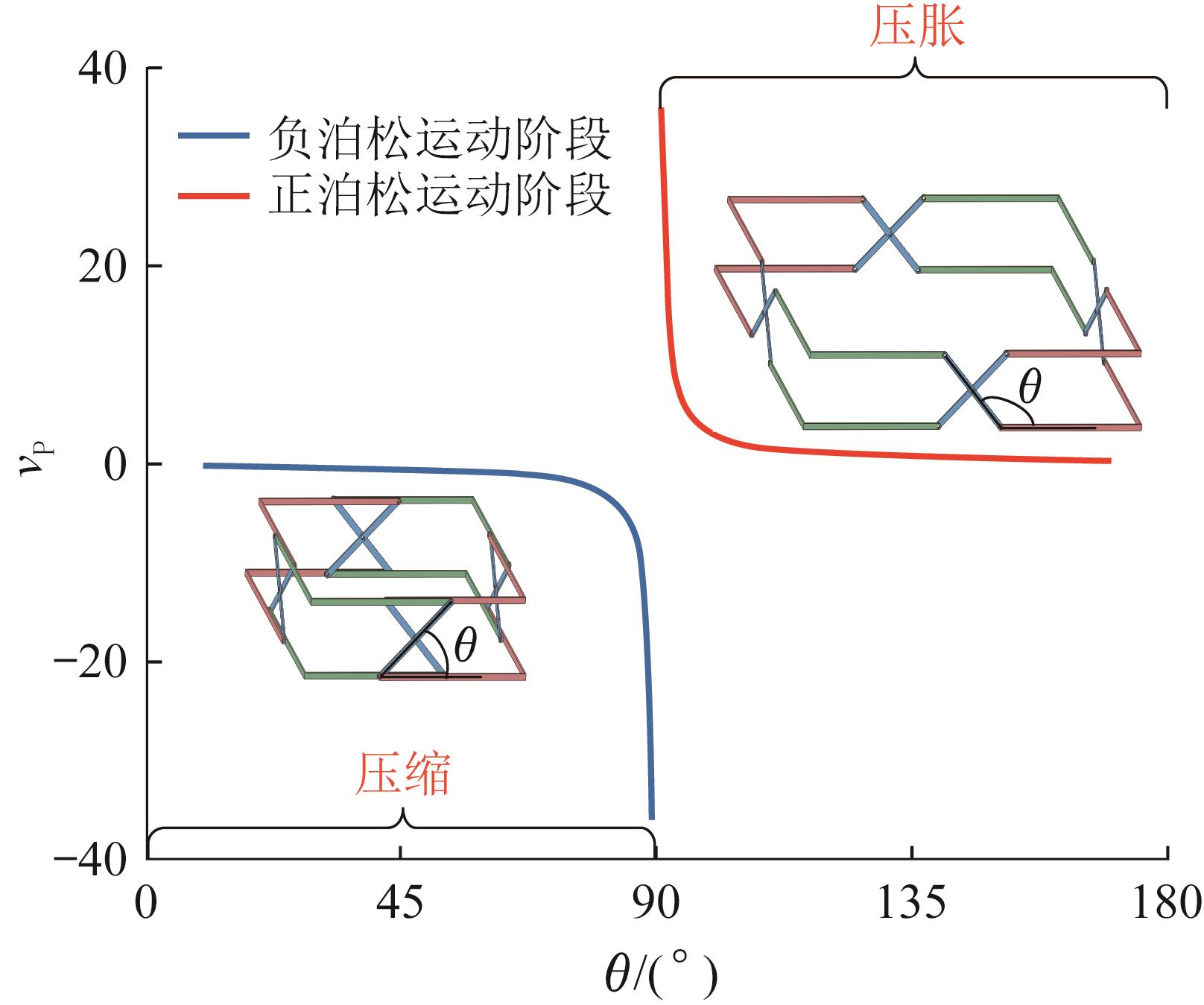
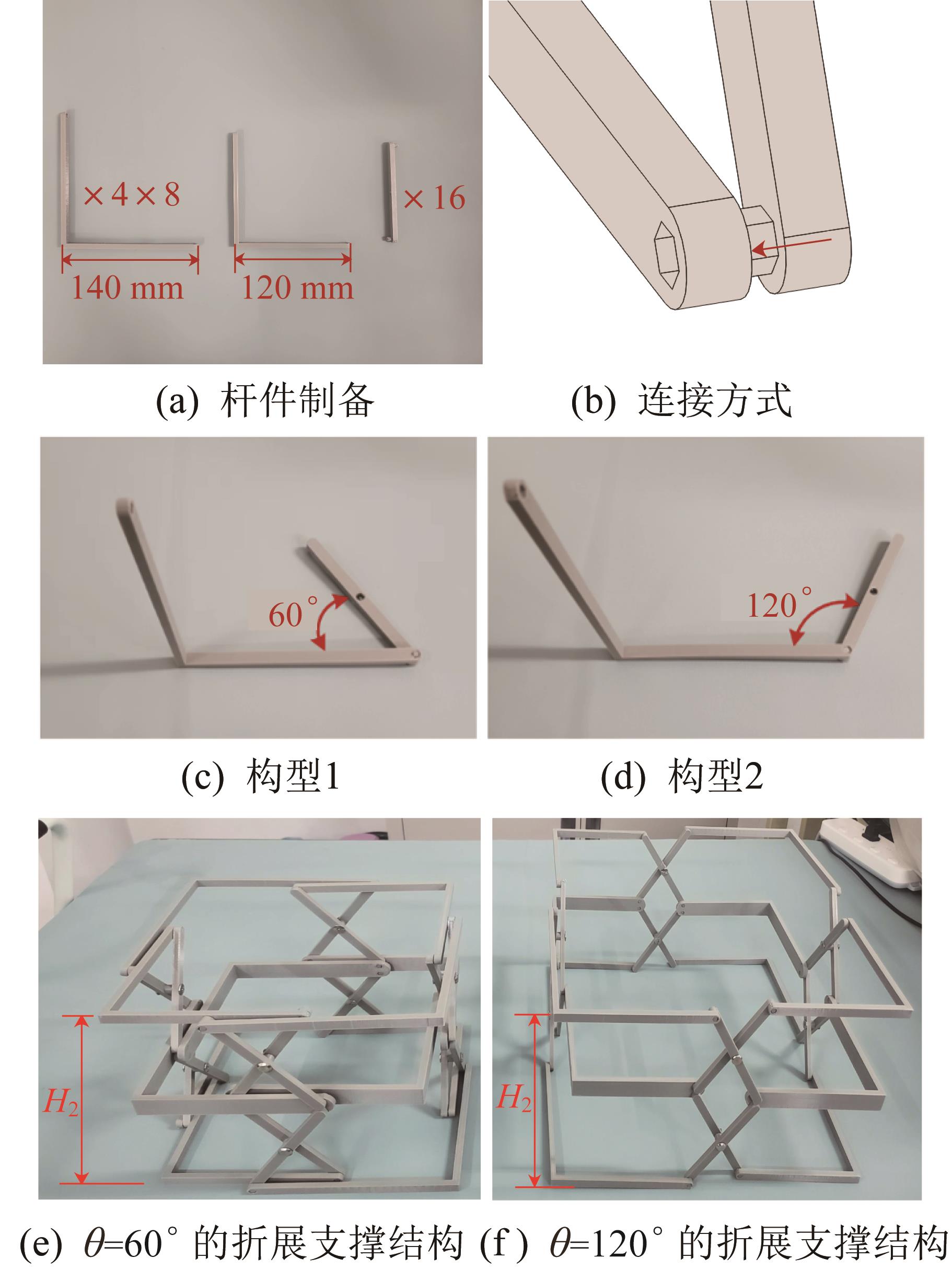
| 具有变泊松运动特性的剪叉式折展机构运动学分析 |
畅博彦1,2( ),闫圣杰1,梁栋1,2,关鑫1,韩芳孝1 ),闫圣杰1,梁栋1,2,关鑫1,韩芳孝1 |
1.天津工业大学 机械工程学院,天津 300387
2.天津市现代机电装备技术重点实验室,天津 300387 |
|
| Kinematics analysis of scissor deployable mechanism with variable Poisson motion characteristics |
| Boyan CHANG1,2(),Shengjie YAN1,Dong LIANG1,2,Xin GUAN1,Fangxiao HAN1 |
1.School of Mechanical Engineering, Tiangong University, Tianjin 300387, China
2.Tianjin Key Laboratory of Advanced Mechatronics Equipment Technology, Tianjin 300387, China |
引用本文:
畅博彦,闫圣杰,梁栋,关鑫,韩芳孝. 具有变泊松运动特性的剪叉式折展机构运动学分析[J]. 工程设计学报, 2024, 31(1): 20-30.
Boyan CHANG,Shengjie YAN,Dong LIANG,Xin GUAN,Fangxiao HAN. Kinematics analysis of scissor deployable mechanism with variable Poisson motion characteristics[J]. Chinese Journal of Engineering Design, 2024, 31(1): 20-30.
链接本文:
https://www.zjujournals.com/gcsjxb/CN/10.3785/j.issn.1006-754X.2024.03.306
或
https://www.zjujournals.com/gcsjxb/CN/Y2024/V31/I1/20
|
| 1 |
邓宗全.空间折展机构设计[M].哈尔滨:哈尔滨工业大学出版社,2013:1-3.
DENG Z Q. Design of space deployable and foldable mechanism[M]. Harbin: Harbin Institute of Technology Press, 2013: 1-3.
|
| 2 |
田大可,高海明,金路,等.模块化空间折展机构研究现状与展望[J].中国空间科学技术,2021,41(4):16-31.
TIAN D K, GAO H M, JIN L, et al. Research status and prospect of modular space deployable and foldable mechanism[J]. Chinese Space Science and Technology, 2021, 41(4): 16-31.
|
| 3 |
徐伟炜.集中荷载下固定铰支剪式可展桥梁结构分析与参数优化[J].东南大学学报(自然科学版),2022,52(6):1063-1070.
XU W W. Structural analysis and parameter optimization of fixed hinged scissor deployable bridges under point load[J]. Journal of Southeast University (Natural Science Edition), 2022, 52(6): 1063-1070.
|
| 4 |
TACHI T. Freeform rigid-foldable structure using bidirectionally flat-foldable planar quadrilateral mesh[M]. Vienna: Springer Vienna, 2010: 87-102.
|
| 5 |
唐愉真,刘超,肖洪,等.可展薄膜的Miura弹性折痕建模与分析[J].哈尔滨工业大学学报,2023,55(1):1-11. doi:10.11918/202203107
TANG Y Z, LIU C, XIAO H, et al. Modeling and analysis of Miura elastic creases for deployable membrane[J]. Journal of Harbin Institute of Technology, 2023, 55(1): 1-11.
doi: 10.11918/202203107
|
| 6 |
MA X F, LI T J, MA J Y, et al. Recent advances in space-deployable structures in China[J]. Engineering, 2022, 17(10): 207-219.
|
| 7 |
杨慧,冯健,刘永斌,等.百米级多超弹性铰链抛物柱面天线折展机构设计与运动学分析[J].机械工程学报,2022,58(3):75-83. doi:10.3901/jme.2022.03.075
YANG H, FENG J, LIU Y B, et al. Design and kinematic analysis of a large deployable mechanism of the parabolic cylindrical antenna with multi tape-spring hinges[J]. Journal of Mechanical Engineering, 2022, 58(3): 75-83.
doi: 10.3901/jme.2022.03.075
|
| 8 |
畅博彦,杨帅,金国光,等.基于直线驱动的空间可展机构运动分析[J].机械工程学报,2020,56(5):192-201. doi:10.3901/jme.2020.05.192
CHANG B Y, YANG S, JIN G G, et al. Motion analysis of spatial deployable mechanism driven in straight line[J]. Journal of Mechanical Engineering, 2020, 56(5): 192-201.
doi: 10.3901/jme.2020.05.192
|
| 9 |
畅博彦,徐鑫,梁栋,等.厚板三浦折展机构的几何设计与运动分析[J].中国空间科学技术,2022,42(4):146-157.
CHANG B Y, XU X, LIANG D, et al. Geometric design and motion analysis of Miura-Ori mechanism with thick panels[J]. Chinese Space Science and Technology, 2022, 42(4): 146-157.
|
| 10 |
杨名远,马家耀,李建民,等.基于厚板折纸理论的微创手术钳[J].机械工程学报,2018,54(17):36-45. doi:10.3901/jme.2018.17.036
YANG M Y, MA J Y, LI J M, et al. Thick-panel origami inspired forceps for minimally invasive surgery[J]. Journal of Mechanical Engineering, 2018, 54(17): 36-45.
doi: 10.3901/jme.2018.17.036
|
| 11 |
EDMONDSON B J, BOWEN L A, GRAMES C L, et al. Oriceps: origami-inspired forceps[C]//ASME 2013 Conference on Smart Materials, Adaptive Structures and Intelligent Systems, Snowbird, Utah, Sep. 16-18, 2013.
|
| 12 |
方虹斌,吴海平,刘作林,等.折纸结构和折纸超材料动力学研究进展[J].力学学报,2022,54(1):1-38. doi:10.6052/0459-1879-21-478
FANG H B, WU H P, LIU Z L, et al. Advances in the dynamics of origami structures and origami metamaterials[J]. Chinese Journal of Theoretical and Applied Mechanics, 2022, 54(1): 1-38.
doi: 10.6052/0459-1879-21-478
|
| 13 |
YANG L, HARRYSSON O, WEST H, et al. Mechanical properties of 3D re-entrant honeycomb auxetic structures realized via additive manufacturing[J]. International Journal of Solids and Structures, 2015, 69: 475-490.
|
| 14 |
BABAEE S, SHIM J, WEAVER J C, et al. 3D soft metamaterials with negative Poisson's ratio[J]. Advanced Materials, 2013, 25(36): 5044-5049.
|
| 15 |
GRIMA J N, EVANS K E. Auxetic behavior from rotating squares[J]. Journal of Materials Science Letters, 2000, 19: 1563-1565.
|
| 16 |
WANG X L, QU H B, LI X, et al. Multi-triangles cylindrical origami and inspired metamaterials with tunable stiffness and stretchable robotic arm[J]. PNAS Nexus, 2023, 2(4): pgad098.
|
| 17 |
陈焱.基于机构运动的大变形超材料[J].机械工程学报,2020,56(19):2-13. doi:10.3901/jme.2020.19.002
CHEN Y. Review on kinematic metamaterials[J]. Journal of Mechanical Engineering, 2020, 56(19): 2-13.
doi: 10.3901/jme.2020.19.002
|
| 18 |
YASUDA H, YEIN T, TACHI T, et al. Folding behaviour of Tachi-Miura polyhedron bellows[J]. Proceedings of the Royal Society A: Mathematical, Physical and Engineering Sciences, 2013, 469(2159): 20130351.
|
| 19 |
FILIPOV E T, TACHI T, PAULINO G H. Origami tubes assembled into stiff, yet reconfigurable structures and metamaterials[J]. Proceedings of the National Academy of Sciences, 2015, 112(40): 12321-12326.
|
| 20 |
KAMRAVA S, MOUSANEZHAD D, EBRAHIMI H, et al. Origami-based cellular metamaterial with auxetic, bistable, and self-locking properties[J]. Scientific Reports, 2017, 7(1): 1-9.
|
| 21 |
FANG H, CHU S C A, XIA Y, et al. Programmable self-locking origami mechanical metamaterials[J]. Advanced Materials, 2018, 30(15): 1706311.
|
| 22 |
YASUDA H, YANG J. Reentrant origami-based metamaterials with negative Poisson's ratio and bistability[J]. Physical Review Letters, 2015, 114(18): 185502.
|
| 23 |
YANG Y F, YOU Z. A modular origami-inspired mechanical metamaterial[EB/OL]. (2020-12-17) [2023-10-20]. .
|
| 24 |
CHEN Y, LIANG J, SHI P, et al. Inverse design of programmable Poisson's ratio and in-plane stiffness for generalized four-fold origami[J]. Composite Structures, 2023, 311: 116789.
|
| 25 |
WANG H, ZHANG Y, LIN W, et al. A novel two-dimensional mechanical metamaterial with negative Poisson's ratio[J]. Computational Materials Science, 2020, 171: 109232.
|
| 26 |
TAYLOR M, FRANCESCONI L, BALDI A, et al. A novel auxetic structure with enhanced impact performance by means of periodic tessellation with variable Poisson's ratio[C]//Proceedings of the 2018 Annual Conference on Experimental and Applied Mechanics. Berlin: Springer International Publishing, 2019: 211-218.
|
| 27 |
FLEISCH M, THALHAMER A, MEIER G, et al. Asymmetric chiral and antichiral mechanical metamaterials with tunable Poisson's ratio[J]. APL Materials, 2022, 10(6): 061105.
|
| 28 |
PRATAPA P P, LIU K, PAULINO G H. Geometric mechanics of origami patterns exhibiting Poisson's ratio switch by breaking mountain and valley assignment[J]. Physical Review Letters, 2019, 122(15): 155501.
|
| 29 |
KHAN K A, AL-MANSOOR S, KHAN S Z, et al. Piezoelectric metamaterial with negative and zero Poisson's ratios[J]. Journal of Engineering Mechanics, 2019, 145(12): 04019101.
|
| 30 |
刘鸿文.材料力学[M].北京:高等教育出版社,2017:6-9. doi:10.1051/ncssc/201701045
LIU H W. Mechanics of materials[M]. Beijing: Higher Education Press, 2017: 6-9.
doi: 10.1051/ncssc/201701045
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|