| 建模、仿真、分析与决策 |
|

|
|
|
| 3-PUU并联机构的运动学分析与验证 |
陈明方( ),黄良恩,张永霞,姚国一 ),黄良恩,张永霞,姚国一 |
| 昆明理工大学 机电工程学院,云南 昆明 650500 |
|
| Kinematics analysis and validation of 3-PUU parallel mechanism |
| Mingfang CHEN(),Liangen HUANG,Yongxia ZHANG,Guoyi YAO |
| Faculty of Mechanical and Electrical Engineering, Kunming University of Science and Technology, Kunming 650500, China |
引用本文:
陈明方,黄良恩,张永霞,姚国一. 3-PUU并联机构的运动学分析与验证[J]. 工程设计学报, 2023, 30(6): 763-778.
Mingfang CHEN,Liangen HUANG,Yongxia ZHANG,Guoyi YAO. Kinematics analysis and validation of 3-PUU parallel mechanism[J]. Chinese Journal of Engineering Design, 2023, 30(6): 763-778.
链接本文:
https://www.zjujournals.com/gcsjxb/CN/10.3785/j.issn.1006-754X.2024.03.157
或
https://www.zjujournals.com/gcsjxb/CN/Y2023/V30/I6/763
|
| 1 |
陈聪.新型3-PUU并联机器人工作空间优化与运动学标定[D].重庆:重庆大学,2018:1-3.
CHEN C. Workspace optimization and kinematic calibr-ation of a new 3-PUU parallel robot[D]. Chongqing: Chongqing University, 2018: 1-3.
|
| 2 |
朱伟,顾开荣,王传伟,等.一种3T1R并联机构设计及运动学性能分析[J].中国机械工程,2018,29(1):14-21. doi:10.3969/j.issn.1004-132X.2018.01.003
ZHU W, GU K R, WANG C W, et al. Design and kinematics performance analysis of a 3T1R parallel mechanism [J]. China Mechanical Engineering, 2018, 29(1): 14-21.
doi: 10.3969/j.issn.1004-132X.2018.01.003
|
| 3 |
李菊,朱忠颀,沈惠平,等.三平移并联机构拓扑设计与运动学分析[J].农业机械学报,2022,53(9):425-433. doi:10.6041/j.issn.1000-1298.2022.09.044
LI J, ZHU Z Q, SHEN H P, et al. Topological design and kinematic analysis of novel three-translation parallel mechanism[J]. Transactions of the Chinese Society for Agricultural Machinery, 2022, 53(9): 425-433.
doi: 10.6041/j.issn.1000-1298.2022.09.044
|
| 4 |
王世杰,冯伟,李铁军,等.空间2自由度冗余驱动并联机构运动学性能分析[J].机械工程学报,2022,58(23):18-27. doi:10.3901/jme.2022.23.018
WANG S J, FENG W, LI T J, et al. Kinematic performance analysis of spatial 2-DOF redundantly actuated parallel manipulator[J]. Journal of Mechanical Engineering, 2022, 58(23):18-27.
doi: 10.3901/jme.2022.23.018
|
| 5 |
刘骏豪.3-PUU并联机器人机构误差及弹性动力学研究[D].重庆:重庆大学,2019:6-7.
LIU J H. Mechanism error and elastodynamic study of 3-PUU parallel robot[D]. Chongqing: Chongqing University, 2019: 6-7.
|
| 6 |
赵磊,闫照方,栾倩倩,等.大空间运动3-RRRU并联机器人运动学标定与误差分析[J].农业机械学报,2021,52(11):411-420. doi:10.6041/j.issn.1000-1298.2021.11.045
ZHAO L, YAN Z F, LUAN Q Q, et al. Kinematic calibration and error analysis of 3-RRRU parallel robot in large overall motion[J]. Transactions of the Chinese Society for Agricultural Machinery, 2021, 52(11): 411-420.
doi: 10.6041/j.issn.1000-1298.2021.11.045
|
| 7 |
周毅钧,傅敏,郑小东.3-SPS/PPS并联机构运动学分析[J].科学技术与工程,2021,21(1):152-157.
ZHOU Y J, FU M, ZHENG X D. Kinematics analysis of 3-SPS/PPS parallel mechanism [J]. Science Technology and Engineering, 2021, 21(1): 152-157.
|
| 8 |
FERNANDES J J, SELVAKUMAR A A. Kinematic and dynamic analysis of 3PUU parallel manipulator for medical applications[J]. Procedia Computer Science, 2018, 133: 604-611.
|
| 9 |
LASKI P A, TAKOSOGLU J E, BLASIAK S. Design of a 3-DOF tripod electro pneumatic parallel manipulator[J]. Robotics and Autonomous Systems, 2015, 72: 59-70.
|
| 10 |
孟庆梅,李佳宇,李菊,等.半对称三平移Delta-CU并联机构运动误差分析与标定[J].农业机械学报,2021,52(1):393-400. doi:10.6041/j.issn.1000-1298.2021.01.044
MENG Q M, LI J Y, LI J, et al. Error modeling analysis and calibration of semi-symmetrical three-translation Delta-CU parallel mechanism[J]. Transactions of the Chinese Society for Agricultural Machinery, 2021, 52(1): 393-400.
doi: 10.6041/j.issn.1000-1298.2021.01.044
|
| 11 |
李菊,肖思进,沈惠平,等.两支链三平移并联机构动力学分析与性能优化[J].农业机械学报,2022,53(10):412-422.
LI J, XIAO S J, SHEN H P, et al. Dynamics analysis and performance optimization of two-chain and three-translation parallel mechanism[J]. Transactions of the Chinese Society for Agricultural Machinery, 2022, 53(10): 412-422.
|
| 12 |
冯李航,张为公,龚宗洋,等.Delta系列并联机器人研究进展与现状[J].机器人,2014,36(3):375-384.
FENG L H, ZHANG W G, GONG Z Y, et al. Developments of Delta-like parallel manipulators: a review[J]. Robot, 2014, 36(3): 375-384.
|
| 13 |
丁培燎. Delta并联机器人运动学分析与控制系统研究[D].太原:中北大学,2022:5-6.
DING P L. Research on kinematics analysis and control system of Delta parallel robot[D]. Taiyuan: North University of China, 2022: 5-6.
|
| 14 |
CHUNG J, LEE S H, YI B J, et al. Implementation of a foldable 3-DOF master device to a glass window panel fitting task[J]. Automation in Construction, 2010, 19(7): 855-866.
|
| 15 |
DASGUPTA B, MRUTHYUNJAYA S. A Newton-Euler formation for the inverse dynamics of the Stewart platform manipulator[J]. Mechanism and Machine Theory, 1998, 33(8): 1135-1152.
|
| 16 |
INNOCENTI C, PARENTI C P. Direct position analysis of the Stewart platform mechanism[J]. Mechanism and Machine Theory, 1990, 25(6): 611-621.
|
| 17 |
张树梅,邓子龙,高兴军.基于改进粒子群算法的6-PTRT并联机器人运动学研究[J].制造业自动化,2020,42(4):65-68. doi:10.3969/j.issn.1009-0134.2020.04.016
ZHANG S M, DENG Z L, GAO X J. Kinematics study of 6-PTRT parallel robot based on improved particle swarm optimization[J]. Manufacturing Automation, 2020, 42(4): 65-68.
doi: 10.3969/j.issn.1009-0134.2020.04.016
|
| 18 |
刘秀莹,张建军,刘承磊,等.基于工作空间的踝关节康复广义球面并联机器人运动学参数优化[J].中国机械工程,2021,32(16):1921-1929. doi:10.3969/j.issn.1004-132X.2021.16.004
LIU X Y, ZHANG J J, LIU C L, et al. Kinematic parameter optimization of workspace-based generalized spherical parallel robots for ankle joint rehabilitation[J]. China Mechanical Engineering, 2021, 32(16): 1921-1929.
doi: 10.3969/j.issn.1004-132X.2021.16.004
|
| 19 |
ZENEBE K Z. Formulation of a generalized Jacobian and inverse acceleration analysis of a linear Delta manipulator based on reciprocal screws method[J]. International Journal of Engineering Research and Technology, 2013, 2(2): 1-9.
|
| 20 |
吴金波,韩鹏.一平动两转动3-UPU并联机构奇异性分析[J].机械科学与技术,2016,35(9):1313-1317. doi:10.13433/j.cnki.1003-8728.2016.0901
WU J B, HAN P. Singularity analysis of a 3-UPU parallel manipulator with one translation and two rotations[J]. Mechanical Science and Technology for Aerospace Engineering, 2016, 35(9): 1313-1317.
doi: 10.13433/j.cnki.1003-8728.2016.0901
|
| 21 |
MERLET J P. Parallel robots[M]. 2nd ed. Dordrecht: Springer, 2005: 179-211.
|
| 22 |
黄胜军,刘宏昭.一种冗余驱动并联机构的设计与奇异性分析[J].机械科学与技术,2017,36(7):998-1004. doi:10.13433/j.cnki.1003-8728.2017.0703
HUANG S J, LIU H Z. Structure synthesis and singularity analysis of a novel redundantly actuated parallel mechanism[J]. Mechanical Science and Technology for Aerospace Engineering, 2017, 36(7): 998-1004.
doi: 10.13433/j.cnki.1003-8728.2017.0703
|
| 23 |
宛宇,张春燕,朱锦翊,等.基于螺旋理论的多模式移动3-RSR并联机构奇异性分析[J].轻工学报,2020,35(3):88-98. doi:10.12187/2020.03.011
WAN Y, ZHANG C Y, ZHU J Y, et al. Singularity analysis of multi-mode mobile 3-RSR parallel mechanism based on screw theory[J]. Journal of Light Industry, 2020, 35(3): 88-98.
doi: 10.12187/2020.03.011
|
| 24 |
田海波,马宏伟,马琨,等.一种三构态变胞并联机构运动学及工作空间分析[J].机器人,2019,41(3):414-424.
TIAN H B, MA H W, MA K, et al. Kinematics and workspace analysis of a metamorphic parallel mechanism with three configurations[J]. Robot, 2019, 41(3): 414-424.
|
| 25 |
程颖,杨德华,吴常铖,等.新型六自由度微动并联机构的工作空间分析[J].机械科学与技术,2019,38(3):433-439.
CHENG Y, YANG D H, WU C C, et al. Workspace analysis of a novel six DOFs parallel mechanism with micro displacement[J]. Mechanical Science and Technology for Aerospace Engineering, 2019, 38(3): 433-439.
|
| 26 |
郑鑫,杜力,车林仙,等.2PRPaU-2PSS并联机构运动学分析[J].机械传动,2022,46(11):47-54.
ZHENG X, DU L, CHE L X, et al. Kinematics analysis of 2PRPaU-2PSS parallel mechanism[J]. Journal of Mechanical Transmission, 2022, 46(11): 47-54.
|
| 27 |
张建伟.面向对称三自由度并联机构的运动学分析软件设计与开发[D].秦皇岛:燕山大学,2020:32-35.
ZHANG J W. Design and development for kinematics analysis software of symmetrical 3-DOF parallel mechanism [D]. Qinhuangdao: Yanshan University, 2020: 32-35.
|
| 28 |
王耀军,张海峰.基于自然正交补的冗余驱动并联机构动力学建模[J].机电工程,2022,39(10):1440-1447.
WANG Y J, ZHANG H F. Dynamics modeling of redundantly-actuated parallel robot based on natural orthogonal complement[J]. Journal of Mechanical & Electrical Engineering, 2022, 39(10): 1440-1447.
|
| 29 |
苟建平.4SPRR-SPR并联机器人运动学及工作空间分析[D].成都:四川大学,2021:64-65.
GOU J P. The research of 4SPRR-SPR parallel robot in kinematics and workspace analysis[D]. Chengdu: Sichuan University, 2021: 64-65.
|
| 30 |
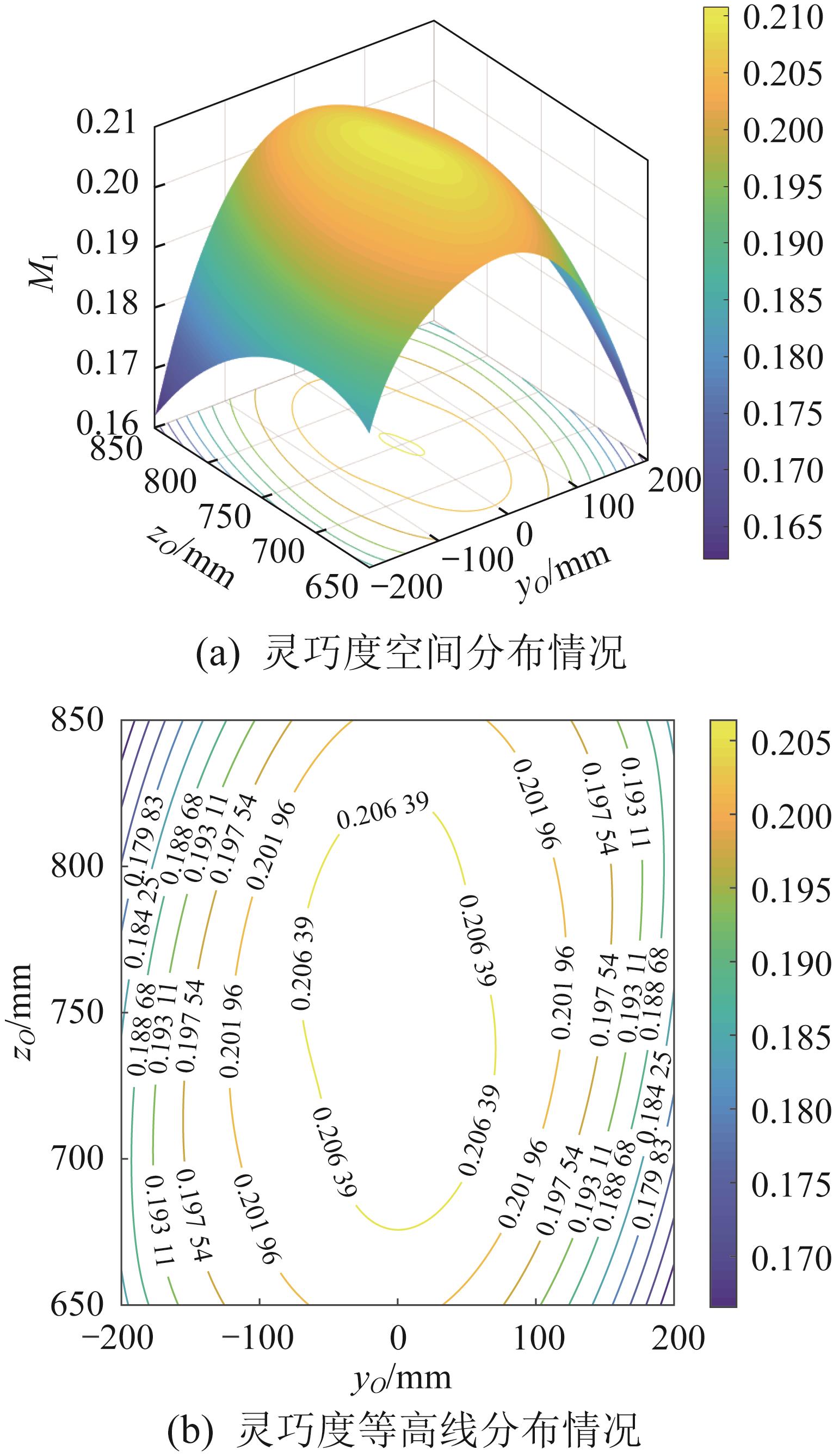
李启腾.一种新型含子闭环并联机构的运动学分析及灵巧性研究[D].天津:河北工业大学,2018:45.
LI Q T. The kinematic analysis and the dexterity research of a novel parallel mechanism with sub closed-chains[D]. Tianjin: Hebei University of Technology, 2018: 45.
|
| 31 |
王庆峰,李虹,王新宇,等.2-SPR/RCU并联机构的运动性能与灵巧度分析[J].机械科学与技术,2021,40(8):1177-1185.
WANG Q F, LI H, WANG X Y, et al. Analysis on kinematic performance and dexterity of 2-SPR/RCU asymmetric parallel mechanism[J]. Mechanical Science and Technology for Aerospace Engineering, 2021, 40(8): 1177-1185.
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|