| 机器人与机构设计 |
|


|
|
|
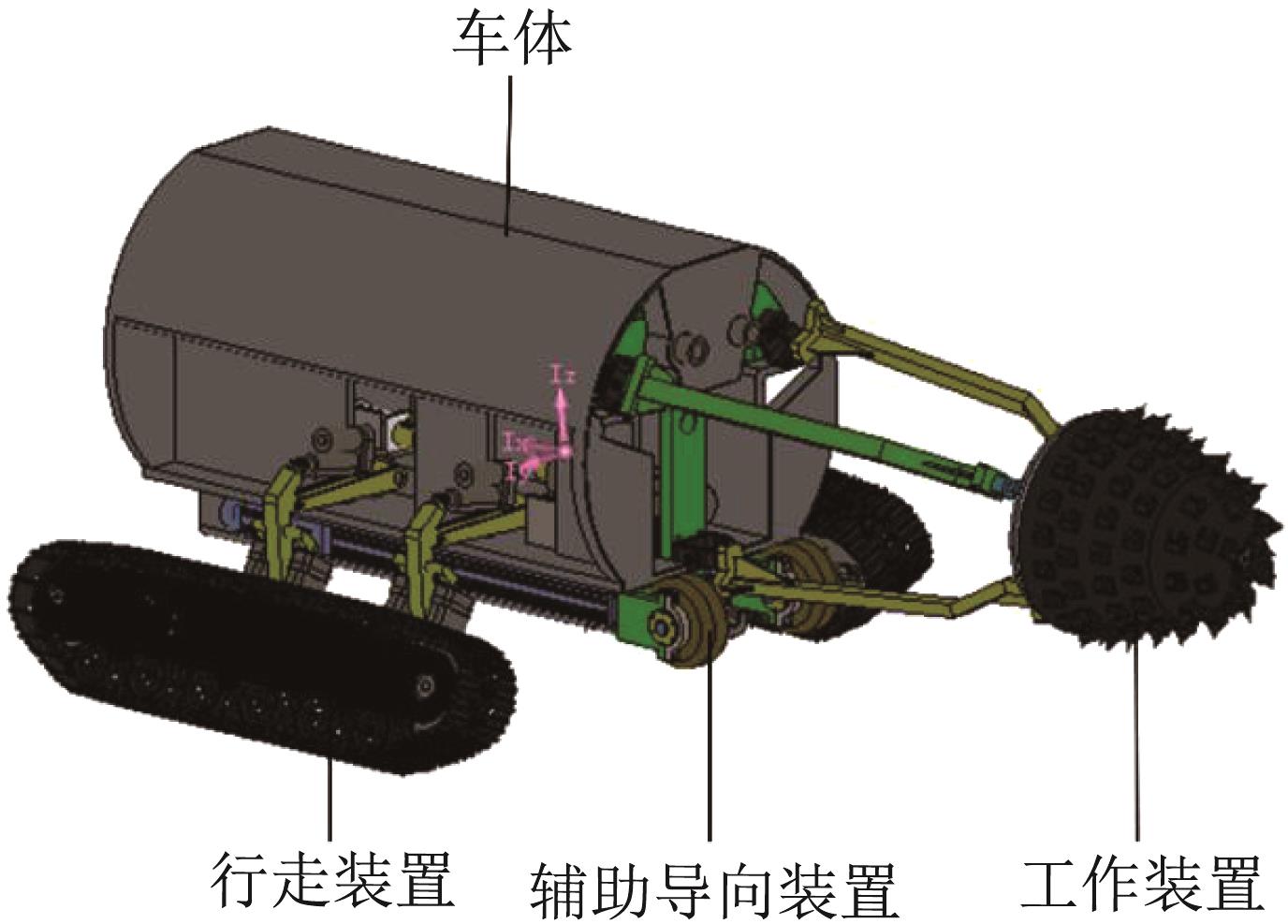
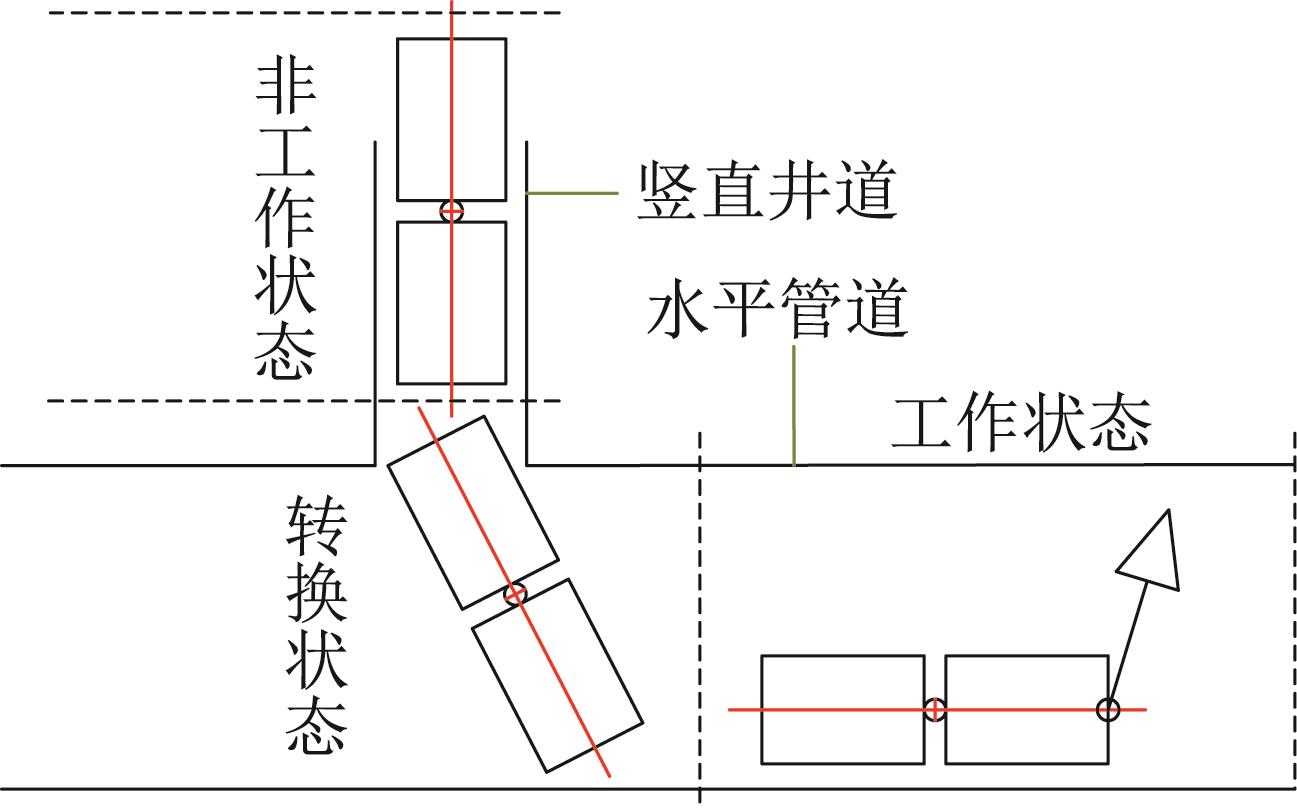
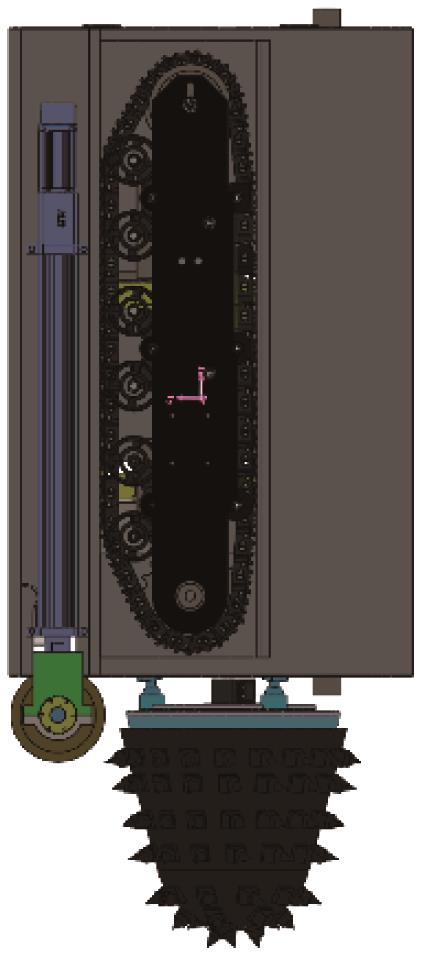
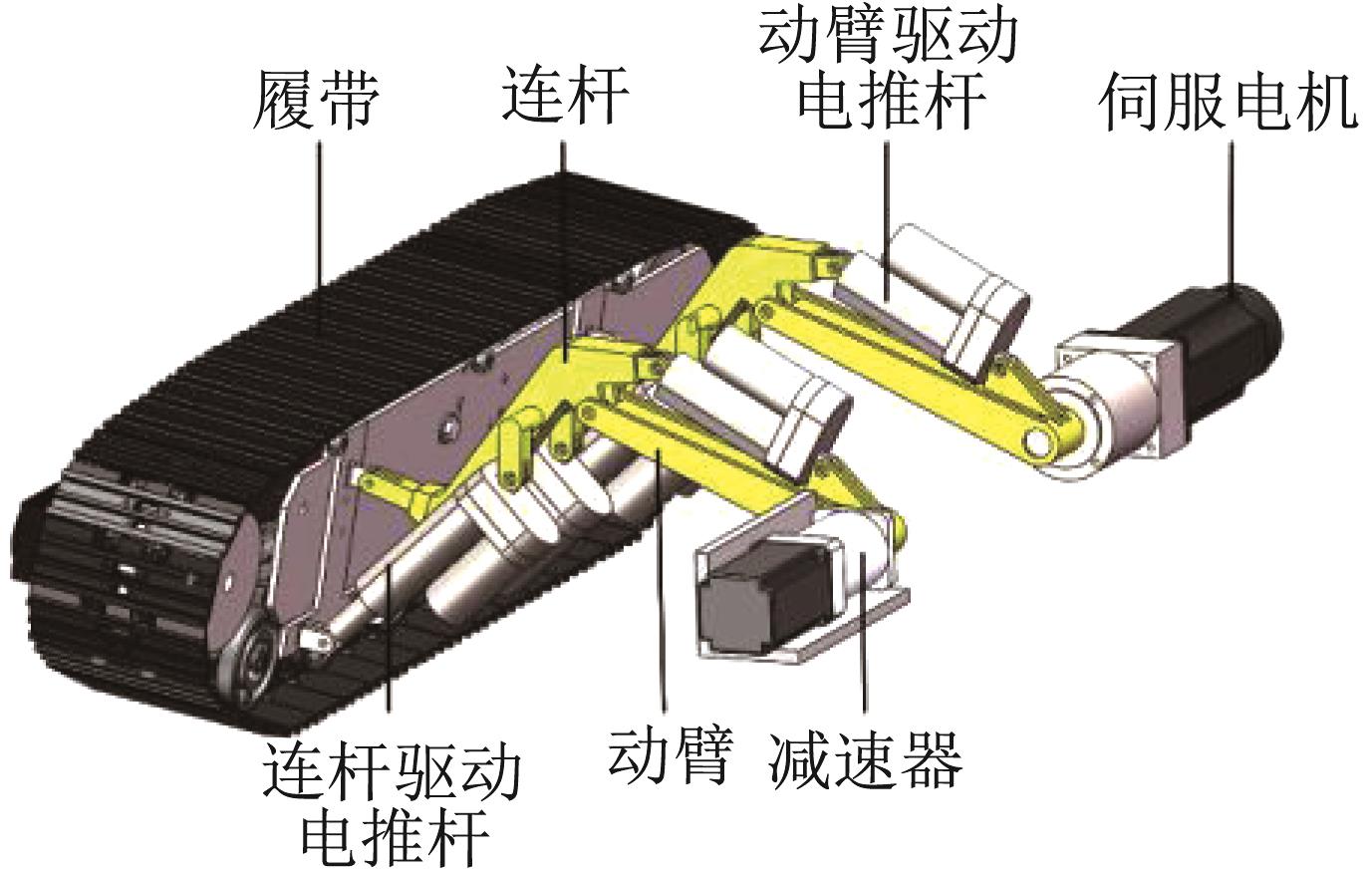
| 可适径调整管道清淤机器人结构设计与运动分析 |
李岳1( ),邓云蛟1,敖然1,侯雨雷1(),曾达幸2 ),邓云蛟1,敖然1,侯雨雷1(),曾达幸2 |
1.燕山大学 机械工程学院,河北 秦皇岛 066004
2.东莞理工学院 机械工程学院,广东 东莞 523808 |
|
| Structure design and motion analysis of pipeline dredging robot with diameter adjustment |
| Yue LI1(),Yunjiao DENG1,Ran AO1,Yulei HOU1(),Daxing ZENG2 |
1.School of Mechanical Engineering, Yanshan University, Qinhuangdao 066004, China
2.School of Mechanical Engineering, Dongguan Institute of Technology, Dongguan 523808, China |
引用本文:
李岳,邓云蛟,敖然,侯雨雷,曾达幸. 可适径调整管道清淤机器人结构设计与运动分析[J]. 工程设计学报, 2023, 30(3): 353-361.
Yue LI,Yunjiao DENG,Ran AO,Yulei HOU,Daxing ZENG. Structure design and motion analysis of pipeline dredging robot with diameter adjustment[J]. Chinese Journal of Engineering Design, 2023, 30(3): 353-361.
链接本文:
https://www.zjujournals.com/gcsjxb/CN/10.3785/j.issn.1006-754X.2023.00.033
或
https://www.zjujournals.com/gcsjxb/CN/Y2023/V30/I3/353
|
| 1 |
NIAN S C, SUN H X, CHENG Y. Mechanism based on pipe cleaning apparatus of high-pressure water jet[C]// AER-Advances in Engineering Research. Paris: Atlantis Press, 2015, 21: 169-175.
|
| 2 |
陈晓鹂,李聪丽,李依璟,等.城市下水管道机器人造型设计[J].机械设计,2020,37(11):148.
CHEN X L, LI C L, LI Y J, et al. Design of robot for urban sewer pipeline[J]. Journal of Machine Design, 2020, 37(11): 148.
|
| 3 |
罗继曼,郭松涛,刘思远.管道机器人清淤装置振动稳定性研究[J].机械设计与制造,2022(1):242-246. doi:10.3969/j.issn.1001-3997.2022.01.055
LUO J M, GUO S T, LIU S Y. Study on vibration stability of pipeline robot dredging device[J]. Machinery Design & Manufacture, 2022(1): 242-246.
doi: 10.3969/j.issn.1001-3997.2022.01.055
|
| 4 |
李智强,李卫国,冯志成,等.管道机器人结构与通过性分析[J].机械传动,2021,45(6):146-152.
LI Z Q, LI W G, FENG Z C, et al. Structural and passability analysis of pipeline robot[J]. Journal of Mechanical Transmission, 2021, 45(6): 146-152.
|
| 5 |
芮宏斌,李路路,曹伟,等.轮-履-腿复合仿生机器人步态规划及越障性能分析[J].工程设计学报,2022,29(2): 133-142. doi:10.3785/j.issn.1006-754X.2022.00.031
RUI H B, LI L L, CAO W, et al. Gait planning and obstacle crossing performance analysis of wheel-walk-leg bionic robot[J]. Chinese Journal of Engineering Design, 2022, 29(2): 133-142.
doi: 10.3785/j.issn.1006-754X.2022.00.031
|
| 6 |
刘洪斌,冀楠.蠕动式管道机器人结构设计与运动特性分析[J].哈尔滨工程大学学报,2022,43(8):1169-1177. doi:10.11990/jheu.202110030
LIU H B, JI N. Structural design and motion characteristics analysis of peristaltic pipeline robots[J]. Journal of Harbin Engineering University, 2022, 43(8): 1169-1177.
doi: 10.11990/jheu.202110030
|
| 7 |
ZHAO Y T, HAN B L, LUO Q S, et al. Design and implementation of four-link robot crawler with variable structure[C]//IOP Conference Series: Materials Science and Engineering, 3rd International Conference on Automation, Control and Robotics Engineering. Chengdu, Jul. 19-22, 2018.
|
| 8 |
陈宗尧,颜国正,王坤东,等.关节履带式管道检测机器人越障性能优化[J]上海交通大学学报,2011,45(7): 1017-1020.
CHEN Z Y, YAN G Z, WANG K D, et al. The performance optimization of the articulated-tracked pipe-inspected robot for obstacle negotiation[J]. Journal of Shanghai Jiaotong University, 2011, 45 (7): 1017-1020.
|
| 9 |
张月,董雷,宦荣华,等.风电叶片管道内窥履带机器人的设计与运动分析[J].中国机械工程,2021,32(15): 1884-1889. doi:10.3969/j.issn.1004-132X.2021.15.015
ZHANG Y, DONG L, HUAN R H, et al. Design and kinematic analysis of crawler-type pipeline endoscope robots for wind turbine blades[J]. China Mechanical Engineering, 2021, 32 (15): 1884-1889.
doi: 10.3969/j.issn.1004-132X.2021.15.015
|
| 10 |
闫宏伟,焦彪彪,马建强,等.一种管道机器人的自适应主动螺旋式驱动机理分析[J].中国机械工程,2018,29(1): 21-29. doi:10.3969/j.issn.1004-132X.2018.01.004
YAN H W, JIAO B B, MA J Q, et al. Adaptive active screw driving mechanism analysis for pipeline robots[J]. China Mechanical Engineering, 2018, 29 (1): 21-29.
doi: 10.3969/j.issn.1004-132X.2018.01.004
|
| 11 |
ZHANG H, ZGAO L N, DAI X F. Hardware design of a pipeline inspection robot[J]. New Trends in Mechatronics and Materials Engineering, 2012, 151: 116-120.
|
| 12 |
NIAN S C, SUN H X, YANG W. Based on the three-dimensional pipeline network of a new type of wheel pipeline robot structure design and simulation[C]// International Conference on Informatics, Control and Automation. Lancaster: Destech Publications, 2015: 36-43.
|
| 13 |
王伟,赵少魁.管道机器人的研究现状及其展望[J].兵工自动化,2019,38(12):24-30.
WANG W, ZHAO S K. Development situation and key technologies of the pipeline robot[J]. Ordnance Industry Automation, 2019, 38 (12): 24-30.
|
| 14 |
ALIREZA A, YOSHINORI K, MASUMI I. A laser scanner for landmark detection with the sewer inspection Robot KANTARO[C]. IEEE/SMC International Conference on System of Systems Engineering. Los Angeles, Apr. 24-26, 2006.
|
| 15 |
刘大伟,刘佳佳.面向管道机器人的非对称惯性驱动系统及其动力学特性[J].中国机械工程,2020,31(18): 2189-2195,2205. doi:10.3969/j.issn.1004-132X.2020.18.006
LIU D W, LIU J J. Asymmetric inertia driving system for in-pipe robots and its dynamics characteristics[J]. China Mechanical Engineering, 2020, 31 (18): 2189-2195, 2205.
doi: 10.3969/j.issn.1004-132X.2020.18.006
|
| 16 |
梁亮,江华,唐勇,等.一种内螺旋管道机器人[J].中国机械工程,2014,25(24):3289-3294. doi:10.3969/j.issn.1004-132X.2014.24.005
LIANG L, JIANG H, TANG Y, et al. An inner spiral in-pipe robot[J]. China Mechanical Engineering, 2014, 25(24): 3289-3294.
doi: 10.3969/j.issn.1004-132X.2014.24.005
|
| 17 |
侯雨雷,敖然,王雷,等.可适径调整的并联式管道清淤机器人:CN202110291823.4[P].2021-05-28.
HOU Y L, AO R, WANG L, et al. Parallel pipe dredging robot with diameter adjustment: CN202110291823.4[P]. 2021-05-28.
|
| 18 |
LYU S N, ZLATANOV D, ZOPPI M, et al. Bundle folding type Ⅲ Bricard linkages[J]. Mechanism and Machine Theory, 2020, 144: 103663.
|
| 19 |
张云娇,魏国武,戴建生.基于旋量理论的3-US并联机构运动学分析[J].机械设计与研究,2014,30(2):8-11.
ZHANG Y J, WEI G W, DAI J S. Kinematic analysis of a 3-US parallel mechanism using screw theory[J]. Machine Design & Research, 2014, 30 (2): 8-11.
|
| 20 |
单彦霞,付冰双,李若松,等.基于并联机构的双重驱动管道机器人设计与研究[J].机械设计,2020,37(6):17-23.
SHAN Y X, FU B S, LI R S, et al. Design and research of the dual-actuated in-pipe robot based on the parallel mechanism[J]. Journal of Machine Design, 2020, 37(6): 17-23.
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|