随着城市规模的扩大,城市道路不断建设,地下排水管道的布局则愈发复杂,且由于管道尺寸多样,管道堵塞情况时有发生,因此及时清理排水管道内的堵塞物尤为重要。传统的清淤方法有绞车清淤、高压水射流清淤[1 ] 及通沟机清淤等。绞车清淤时,须封闭特定路段的道路,会影响人们正常的生产生活;高压水射流清淤时,高压水冲击管壁,易造成管道损坏,且水资源浪费严重;通沟机则难以适应日渐多变的管道直径。
管道机器人具有体积小、重量轻、进出管道灵活、驱动方式简单且易于适应不同的管道环境等特点[2 -4 ] ,目前主要有轮式[5 ] 、蠕动式[6 ] 、履带式[7 -8 ] 、脚式[9 ] 和螺旋式[10 ] 等几种形式。Zhang等[11 ] 提出了一种由行走机构和相机云台组成的轮式管道机器人,其具有良好的移动性能,并能自动纠正姿态以保持平衡。Nian等[12 ] 设计了一种具有管径、曲线适应能力和垂直爬升能力的管道机器人,提出了一种多级减速驱动、可伸缩式三轮爬坡机构。加拿大Inuktun Services公司开发了Versatrax系列管道机器人,用于管道内部检测,其中的一款采用履带作为行走机构,其两侧的履带以一定的夹角布置,通过角度调节可以改变管道机器人的周身尺寸,以适应不同的管径,但不能根据管径的变化进行实时调整[13 ] 。Alireza等[14 ] 研制的轮式管道机器人KANTARO通过调整轮系处4根电推杆的伸缩量来改变轮系偏转角度,来适应不同的管径,但其工作空间相对较小。刘大伟等[15 ] 提出了一种由非圆齿轮和双轴偏心块组成的非对称惯性驱动管道机器人,研究了机器人在管道内的速度变化规律。张月等[9 ] 设计了一种风电叶片管道内窥履带机器人,该机器人主要由履带移动平台和四自由度关节构成,可实现抬头、转弯、爬坡等功能。梁亮等[16 ] 提出了一种内螺旋管道机器人,并优化了其在管道内的轴向推力。
地下排水管道的环境复杂、恶劣、多变,需要管道机器人来清除石块、淤泥等堵塞物。现有的管道机器人多用于管道内部的探伤、检测,其清淤能力还较欠缺。本文针对管道清淤机器人对不同管径的适应要求,提出了一种可适径调整管道清淤机器人方案。设计了基于折展机构的管道清淤机器人的行走装置和并联式工作装置,研究了行走装置末端的运动范围、运动轨迹和工作装置的工作空间,分析了行走装置和工作装置在机器人不同运动状态下驱动力与驱动力矩的变化规律,以期为管道清淤机器人实体样机的研制奠定基础。
1 管道清淤机器人的结构及工作原理
1.1 管道清淤机器人结构
采用模块化设计的思路,管道清淤机器人分为车体、行走装置、工作装置和辅助导向装置等四部分[17 ] ,如图1 所示。
图1
图1
管道清淤机器人的结构
Fig.1
Structure of pipeline dredging robot
行走装置主要由履带和折展机构[18 ] 组成。相较于轮式结构,履带式结构具有更好的越障能力,其重量大,重心低,易于保护,可以有效保证机器人在运动过程中的稳定性。在非工作状态下履带可以收藏于车体内,有利于减小机器人的体积。
工作装置由驱动电机、3-US并联机构[19 -20 ] 和清淤机头组成。其安装于车体的中心部位,可沿车体中心轴线伸缩,工作时可完成俯仰、平移等运动。
辅助导向装置由伺服电缸和导向轮组成,如图2 所示。其安装于机器人的底部,主要用于机器人从竖直姿态向水平姿态的转换。
图2
图2
管道清淤机器人辅助导向装置的结构
Fig.2
Structure of auxiliary guidance device for pipeline dredging robot
1.2 管道清淤机器人工作原理
管道清淤机器人的状态分为非工作状态、转换状态和工作状态,如图3 所示。
图3
图3
管道清淤机器人的状态
Fig.3
States of pipeline dredging robot
普通排污管道检查井口的直径为700 mm。机器人从井道竖直下放时处于非工作状态,下放过程中机器人的宽度应不大于650 mm,此时其行走装置、工作装置折叠于车体内部,辅助导向装置不工作,如图4 所示。
图4
图4
竖直下放时的管道清淤机器人
Fig.4
Pipeline dredging robot during vertical lowering
机器人由竖直姿态转换至水平姿态的过程中,即机器人在转换状态下,其行走装置、工作装置不工作,辅助导向装置的导向轮在伺服电缸的驱动下向下伸展,首先接触水平管道底部,对机器人整机起导向作用,实现整机向前运动,同时支撑清淤机头向上转动以免直接触碰管道内壁而造成管道损坏。机器人从竖直井道过渡到水平管道的过程中,其长度须小于1 500 mm。
机器人到达水平管道底部后即进入工作状态。此时行走装置移动至车体外部,履带在折展机构的驱动下与管道内壁接触;工作装置平移伸出,同时辅助导向装置回收;工作装置运动至车体前端,清淤机头在3-US并联机构的驱动下到达指定位置,开始绞碎、清理管道内部的堵塞物。
2 行走装置运动与驱动分析
2.1 行走装置结构
管道清淤机器人行走装置的结构如图5 所示。其主要由伺服电机、减速器、动臂、动臂驱动电推杆、连杆、连杆驱动电推杆和履带组成。竖直井道下方横向井道的直径为1 500~2 000 mm,通过控制伺服电机的旋转和电推杆的伸缩,调整履带在车体内外的位置和角度,使得车体能够顺畅地在竖直井道下放及在水平管道内行走。
图5
图5
行走装置结构
Fig.5
Structure of walking device
2.2 行走装置运动分析
对应于清淤机器人不同的状态,行走装置的运动有所不同,包括折展运动、管道贴合运动和位姿调整运动。以伺服电机输出轴法向中心即行走装置在车体中的安装点O x 为原点,分别以伺服电机输出轴法向平面内的水平方向、竖直方向为X 向和Y 向,建立机器人坐标系O x -XY ,对行走装置的运动进行分析,如图6 所示。图中:L a o L o c L b c L b d L c d L d e L e f L b e AO 、OC 、BC 、BD 、CD 、DE 、EF、BE 的长度,为已知量;转角θ AB、BC 的长度L a b L b c
图6
图6
行走装置运动分析
Fig.6
Motion analysis of walking device
在坐标系O x -XY 下,电推杆支点A 及连杆支点C 的位置向量分别为:
Α = 0 L a o · s i n θ C = L o c · c o s θ L o c · s i n θ
x B 2 + y B - L a o 2 = L a b 2 x B - L o c ⋅ c o s θ 2 + y B - L o c ⋅ s i n θ 2 = L o c 2 (1)
求解式(1),可得B 点坐标(x B yB )。同理,可得D 、E 、F 点的坐标。
对式(1)求导,可得B 点的速度分量x ˙ B y ˙ B D 、E 、F 点的速度分量。
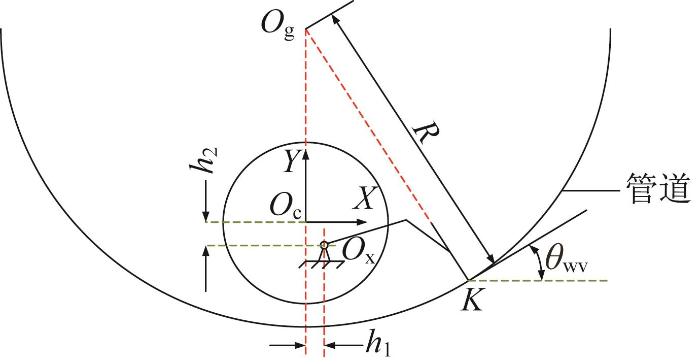
以车体截面圆心作为清淤机器人原点O c ,建立行走装置坐标系O c -XY ,对清淤机器人行走装置进行适径调整运动分析,如图7 所示。图中:O g 为管道截面圆心;R 为管道半径;h 1 为O c 与O x 之间的水平距离;h 2 为O c 与O x 之间的垂直距离;K 为行走装置与履带的相切点;θ w v
图7
图7
行走装置适径调整运动分析
Fig.7
Analysis of the motion of walking device for diameter adjustment
当清淤机器人到达管道底部时,O c 位于O g 的正下方,根据行走装置末端的运动关系,可得K 点在O x -XY 下的位置向量为:K = x K y K T K 点在O c -XY 下的位置向量为:K = x K + h 1 y K + h 2 T K 点为圆心,R 为半径,可得:
x - x K - h 1 2 + y - y K - h 2 2 = R 2
当x = 0 O g 点的位置向量为:O g = x O y O T
K O g = ( x x O - x K - h 1 y O - y K - h 2 ) T E F = ( x F - x E y F - y E ) T
通过改变转角θ 、Lab 、Lbc 和R 的大小来改变 KO g EF KO g EF
将上述数学关系进行编程,依据行走装置的运动方式,施加驱动电推杆一定的伸缩量,利用MATLAB软件求得行走装置末端的运动范围,如图8 所示。
图8
图8
行走装置末端的运动范围
Fig.8
Motion range of the end of walking device
行走装置末端的运动轨迹如图9 所示。图中轨迹1为清淤机器人由非工作状态转换为工作状态的过程中行走装置末端的运动轨迹,轨迹2为清淤机器人适径调整运动过程中行走装置末端的运动轨迹。
图9
图9
行走装置末端的运动轨迹
Fig.9
Motion trajectory of the end of walking device
2.3 行走装置驱动分析
对应于清淤机器人的不同状态,行走装置在3种基本运动方式之间转换,同时其驱动参数和末端的运动学参数也在不断地改变。
利用ADAMS软件对清淤机器人行走装置的运动进行仿真,如图10 所示。
图10
图10
行走装置运动仿真
Fig.10
Motion simulation of walking device
图10 (a)所示为行走装置处于收藏状态。折展机构的动臂和连杆向内折叠于车体内部,此时伺服电机向内旋转44.35°,动臂驱动电推杆外伸68.22 mm,连杆驱动电推杆外伸4.98 mm,履带复位至车体内部两侧,机器人处于非工作状态。
行走装置的折展运动是较为复杂的运动。行走装置进行折展运动时,伺服电机向外旋转121.12°,动臂驱动电推杆内缩69.52 mm,连杆驱动电推杆外伸57.65 mm。固定于车体底部前后左右4个电机的驱动力矩变化曲线如图11 所示;控制前后左右4个动臂的4个动臂电缸的驱动力变化曲线如图12 所示;每个动臂有2支连杆,则控制动臂连杆的8个连杆电缸的驱动力变化曲线如图13 所示。
图11
图11
行走装置进行折展运动时电机驱动力矩变化曲线
Fig.11
Variation curve of motor driving torque during folding motion of walking device
图12
图12
行走装置进行折展运动时动臂电缸驱动力变化曲线
Fig.12
Variation curve of electric cylinder driving force of swing arm during folding motion of walking device
图13
图13
行走装置进行折展运动时连杆电缸驱动力变化曲线
Fig.13
Variation curve of electric cylinder driving force of connecting rod during folding motion of walking device
由图11 可知,行走装置运动1.51 s后,4个电机的驱动力矩都达到最大,最大值为140.75 N·m。由图12 可知,行走装置运动1.68 s后,动臂电缸驱动力的最大值为2 272.32 N。由图13 可知,行走装置运动4.00 s后,连杆电缸驱动力的最大值为5 739.73 N。此外,驱动力和驱动力矩基本都随时间而平缓变化。
通过ADAMS仿真可知,行走装置电机的最大瞬时驱动力矩M d =140.75 N·m,设定动臂旋转角速度ω 1 = 0.523 r a d / s
P 1 = ω 1 × M d = 73.61 W
设定电机减速器传动效率η 1 = 0.95 i 1 =150,安全系数取为1.5,则考虑安全系数及传动效率下电机所需功率为:
P 2 = P 1 / η 1 × 1.5 = 116.23 W
综上,行走装置的驱动电机选用伺服电机,型号为KRS 110。其功率为1.8 kW时,驱动力矩可达6 N·m,转速为3 000 r/min。
3 清淤运动与驱动关系分析
清淤机器人工作装置和折展机构在车体内的分布如图14 所示。
图14
图14
工作装置和折展机构在车体内的分布
Fig.14
Distribution of working device and folding mechanism within the vehicle body
3.1 工作装置末端工作空间分析
建立3-US并联机构整体和分支坐标系,如图15 所示。该并联机构可作三自由度运动。以动平台中心为坐标原点o ,垂直于动平台的方向为z 向,平行于动平台且过原点指向动平台铰点a 的方向为y 向,平行于动平台且过原点垂直于y 向的方向为x 向,建立动坐标系o -xyz ;以静平台中心为坐标原点O ,垂直于静平台的方向为Z S 向,平行于静平台且过原点指向静平台铰点A h 的方向为Y S 向,平行于静平台且过原点垂直于Y S 向的方向为X S 向,建立静坐标系O -X S Y S Z S ;以U副与静平台的连接点为原点O R ,O R 与球副球心连线方向为ZR 向,U副平行于静平台旋转轴的方向为Y R 向,U副平行于静平台且垂直于旋转轴的方向为X R 向,在分支连杆上建立分支坐标系O R -X R YR ZR 。
图15
图15
3-US并联机构整体和分支坐标系
Fig.15
Coordinate system of the overall and branch of 3-US parallel mechanism
采用欧拉角表达,即动坐标系的原点与静坐标系的原点重合,然后动坐标系绕静坐标系的X S 轴旋转α 角,再绕新的Y′ S 轴旋转β 角,最后绕新的Z″ S 轴旋转γ 角,则旋转矩阵表达式为:
R O o = c β ⋅ c γ c β ⋅ s γ - s β s α ⋅ s β ⋅ c γ - s γ ⋅ c α s α ⋅ s β ⋅ s γ + c α ⋅ c γ s α ⋅ c β c α ⋅ s β ⋅ c γ + s α ⋅ s γ c α ⋅ s β ⋅ s γ - s α ⋅ c γ c α ⋅ c β
在动平台坐标系下,机头各铰点a 、b 、c 的位置向量为:
α = L a x 0 0 b = - 1 2 L a x 3 2 L a x 0 c = - 1 2 L a x 3 2 L a x 0
分别将动坐标系下的向量 ab bc ca l a b l b c l c a
l a b = R O o ⋅ b - R O o ⋅ a l b c = R O o ⋅ c - R O o ⋅ b l c a = R O o ⋅ a - R O o ⋅ c
设静坐标系O-X S Y S Z S 绕Z S 轴旋转θ 1 Y S 轴旋转θ 2 A ' O A ' R B ' C ' O B ' R O C ' R A ' B ' C '
T A ' = 3 L A h X 2 L A h X 2 0 T B ' = 0 - L A h X 0 T C ' = - 3 L A h X 2 L A h X 2 0
式中:L A h X A h 与X S 轴之间的距离。
在连杆坐标系下,静平台铰点A h 、B h 、C h 的位置向量分别为:
A h = 0 0 L A h + L a , B h = 0 0 L A h + L a , C h = 0 0 L A h + L a
分别将动平台坐标系下的向量 ab bc ca O A h R O B h R O C h R l A h B h l B h C h l C h A h
l A h B h = R O B h ⋅ B h - R O A h ⋅ A h + T B ' - T A ' l B h C h = R O C h ⋅ C h - R O B h ⋅ B h + T C ' - T B ' l C h A h = R O A h ⋅ A h - R O C h ⋅ C h + T A ' - T C '
动平台坐标系下各向量、分支坐标系下各向量转换到静坐标系下,满足如下关系:
O B h R ⋅ B h - R O A h ⋅ A h + T B ' - T A ' = R O o ⋅ b - R O o ⋅ a O C h R ⋅ C h - R O B h ⋅ B h + T C ' - T B ' = R O o ⋅ c - R O o ⋅ b O A h R ⋅ A h - R O C h ⋅ C h + T A ' - T C ' = R O o ⋅ a - R O o ⋅ c
0 ∘ ≤ θ 1 ≤ 240 ∘ 0 ∘ ≤ θ 2 ≤ 70 ∘
o A h B h = R O A h ⋅ A h + R O B h ⋅ B h + R O C h ⋅ C h
据此编写工作空间算法,利用MATLAB软件绘制机器人工作装置的可达工作空间,结果如图16 所示。
图16
图16
工作装置的可达工作空间
Fig.16
Accessible workspace of working device
由图16 可知,3-US并联机构沿X S 和Y S 向的极限移动范围为600 mm,沿Z S 向最高可达800 mm,其工作空间呈拱形。
图17
图17
工作装置初始位置和侧向清淤极限位置
Fig.17
Initial position and lateral dredging limit position of working device
3.2 工作装置驱动力矩分析
水平管道内部工况复杂。水平管道内污水聚集深度在水平管道直径的1/10以下;内壁上附有污泥,部分管段内壁有凸起;管道下侧沉积有水泥块和石块,部分管段下侧存在污泥等沉积堵塞物。根据此工况,进行清淤机器人工作装置驱动力矩分析,为后续驱动电机的选型及样机试制提供理论指导。
机器人处于工作状态时,清淤机头姿态的改变主要依靠安装于静平台的电机驱动实现。随着机头不同位姿的转换,工作装置的驱动参数也在不断发生改变。采用ADAMS软件对工作装置由初始位置向各清淤极限位置转换进行仿真,分别得到工作装置由初始位置向下运动至下极限位置、下极限位置运动至边侧极限位置、边侧极限位置运动至上极限位置时静平台3个驱动电机的驱动力矩仿真曲线,如图18 所示。
图18
图18
工作装置在不同运动状态时电机驱动力矩变化曲线
Fig.18
Variation curve of motor driving torque of working device under different motion states
工作装置由初始位置向下运动至下极限位置时,静平台驱动电机1与驱动电机2向内旋转63°,驱动电机3保持初始位姿,此时清淤机头底面与静平台呈35°,清淤机头顶端向内朝上。由图18 (a)可知,工作装置运动0.9 s和1.1 s后,静平台驱动电机1和电机3的驱动力矩取得最大值226.31 N·m。
工作装置由下极限位置运动至侧向清淤极限位置1时,电机1、电机3同时向外旋转110°,电机2不旋转,此时清淤机头底面与静平台呈38°;工作装置由侧向清淤极限位置1运动至侧向清淤极限位置2时,电机1、电机2同时向外旋转51.5°,电机3不旋转,此时清淤机头底面与静平台呈39°,清淤机头顶部向内朝下;工作装置由侧向清淤极限位置2运动至侧向清淤极限位置3时,电机2、电机3同时向外旋转51.5°,电机1不旋转,此时清淤机头底面与静平台呈36°,清淤机头顶部向内朝下;工作装置由侧向清淤极限位置3运动至侧向清淤极限位置4时,电机2、电机3同时向内旋转106.5°,电机1不旋转,此时清淤机头底面与静平台呈37°,清淤机头顶部向内朝下。由图18 (b)可知,工作装置运动2.93 s和3.07 s后,电机2和电机3的驱动力矩取得最大值266.42 N·m。
工作装置由边侧极限位置运动到上极限位置时,电机1、电机2同时向外旋转105°,电机3保持初始位姿,此时清淤机头底面与静平台呈35°,清淤机头顶部向内朝下。由图18 (c)可知,工作装置运动10.54 s和11.46 s后电机1和电机2的驱动力矩取得最大值71.11N·m。
工作装置从初始状态向各个不同极限位置转换时,驱动力矩变化总体较为平顺,且最大值不大,表明了工作装置在各极限位置间转换的灵活性。
仿真中工作装置电机的最大驱动力矩M w ω 2 = 1.57 r a d / s
P 3 = ω 2 × M w = 418.28 W
设定电机减速器传动效率η 2 = 0.95 i 2 =150,安全系数取为1.5,则考虑安全系数及传动效率下电机所需功率为:
P 4 = P 3 / η 2 × 1.5 = 660.44 W
因此,工作装置的驱动电机选用亿丰80系列伺服电机,型号为KRS 80。其功率为1.0 kW时,驱动力矩可达4 N·m,转速为2 500 r/min。
图19
图19
管道清淤机器人整机尺寸
Fig.19
Overall dimensions of pipeline dredging robot
4 结 论
1)针对清淤机器人对不同管径适应和调整的需求,提出了一种新型管道清淤机器人。分别基于折展机构和并联机构设计了行走装置和工作装置,可实现机器人姿态变换及清淤机头的俯仰、移动功能。
2)编写了工作空间算法,分析并绘制了行走装置和工作装置的工作空间,完成了行走装置和工作装置的运动轨迹规划。
3)模拟了清淤机器人折展调姿运动以及在不同清淤极限位置间转换的运动过程,获得其电机驱动力矩的变化曲线,表明了机器人行走的稳定性及工作位置转换的灵活性。
参考文献
View Option
[1]
NIAN S C SUN H X CHENG Y Mechanism based on pipe cleaning apparatus of high-pressure water jet
[C]// AER-Advances in Engineering Research . Paris : Atlantis Press , 2015 , 21 : 169 -175 .
[本文引用: 1]
[2]
陈晓鹂 ,李聪丽 ,李依璟 ,等 城市下水管道机器人造型设计
[J].机械设计 ,2020 ,37 (11 ):148 .
[本文引用: 1]
CHEN X L LI C L LI Y J et al Design of robot for urban sewer pipeline
[J]. Journal of Machine Design , 2020 , 37 (11 ): 148 .
[本文引用: 1]
[3]
LUO J M GUO S T LIU S Y Study on vibration stability of pipeline robot dredging device
[J]. Machinery Design & Manufacture , 2022 (1 ): 242 -246 .
DOI:10.3969/j.issn.1001-3997.2022.01.055
[4]
李智强 ,李卫国 ,冯志成 ,等 管道机器人结构与通过性分析
[J].机械传动 ,2021 ,45 (6 ):146 -152 .
[本文引用: 1]
LI Z Q LI W G FENG Z C et al Structural and passability analysis of pipeline robot
[J]. Journal of Mechanical Transmission , 2021 , 45 (6 ): 146 -152 .
[本文引用: 1]
[6]
[本文引用: 1]
LIU H B JI N Structural design and motion characteristics analysis of peristaltic pipeline robots
[J]. Journal of Harbin Engineering University , 2022 , 43 (8 ): 1169 -1177 .
DOI:10.11990/jheu.202110030
[本文引用: 1]
[7]
ZHAO Y T HAN B L LUO Q S et al Design and implementation of four-link robot crawler with variable structure
[C]//IOP Conference Series: Materials Science and Engineering, 3rd International Conference on Automation, Control and Robotics Engineering . Chengdu, Jul . 19 -22 , 2018 .
[本文引用: 1]
[8]
陈宗尧 ,颜国正 ,王坤东 ,等 关节履带式管道检测机器人越障性能优化
[J]上海交通大学学报 ,2011 ,45 (7 ): 1017 -1020 .
[本文引用: 1]
CHEN Z Y YAN G Z WANG K D et al The performance optimization of the articulated-tracked pipe-inspected robot for obstacle negotiation
[J]. Journal of Shanghai Jiaotong University , 2011 , 45 (7 ): 1017 -1020 .
[本文引用: 1]
[11]
ZHANG H ZGAO L N DAI X F Hardware design of a pipeline inspection robot
[J]. New Trends in Mechatronics and Materials Engineering , 2012 , 151 : 116 -120 .
[本文引用: 1]
[12]
NIAN S C SUN H X YANG W Based on the three-dimensional pipeline network of a new type of wheel pipeline robot structure design and simulation
[C]// International Conference on Informatics, Control and Automation . Lancaster : Destech Publications , 2015 : 36 -43 .
[本文引用: 1]
[13]
王伟 ,赵少魁 管道机器人的研究现状及其展望
[J].兵工自动化 ,2019 ,38 (12 ):24 -30 .
[本文引用: 1]
WANG W ZHAO S K Development situation and key technologies of the pipeline robot
[J]. Ordnance Industry Automation , 2019 , 38 (12 ): 24 -30 .
[本文引用: 1]
[14]
ALIREZA A YOSHINORI K MASUMI I A laser scanner for landmark detection with the sewer inspection Robot KANTARO
[C]. IEEE/SMC International Conference on System of Systems Engineering. Los Angeles, Apr . 24 -26 , 2006 .
[本文引用: 1]
[17]
侯雨雷 ,敖然 ,王雷 ,等 可适径调整的并联式管道清淤机器人
:CN202110291823.4 [P].2021-05-28 .
[本文引用: 1]
HOU Y L AO R WANG L et al Parallel pipe dredging robot with diameter adjustment
CN202110291823.4 [P]. 2021-05-28 .
[本文引用: 1]
[18]
LYU S N ZLATANOV D ZOPPI M et al Bundle folding type Ⅲ Bricard linkages
[J]. Mechanism and Machine Theory , 2020 , 144 : 103663 .
[本文引用: 1]
[19]
张云娇 ,魏国武 ,戴建生 基于旋量理论的3-US并联机构运动学分析
[J].机械设计与研究 ,2014 ,30 (2 ):8 -11 .
[本文引用: 1]
ZHANG Y J WEI G W DAI J S Kinematic analysis of a 3-US parallel mechanism using screw theory
[J]. Machine Design & Research , 2014 , 30 (2 ): 8 -11 .
[本文引用: 1]
[20]
单彦霞 ,付冰双 ,李若松 ,等 基于并联机构的双重驱动管道机器人设计与研究
[J].机械设计 ,2020 ,37 (6 ):17 -23 .
[本文引用: 1]
SHAN Y X FU B S LI R S et al Design and research of the dual-actuated in-pipe robot based on the parallel mechanism
[J]. Journal of Machine Design , 2020 , 37 (6 ): 17 -23 .
[本文引用: 1]
Mechanism based on pipe cleaning apparatus of high-pressure water jet
1
2015
... 随着城市规模的扩大,城市道路不断建设,地下排水管道的布局则愈发复杂,且由于管道尺寸多样,管道堵塞情况时有发生,因此及时清理排水管道内的堵塞物尤为重要.传统的清淤方法有绞车清淤、高压水射流清淤[1 ] 及通沟机清淤等.绞车清淤时,须封闭特定路段的道路,会影响人们正常的生产生活;高压水射流清淤时,高压水冲击管壁,易造成管道损坏,且水资源浪费严重;通沟机则难以适应日渐多变的管道直径. ...
城市下水管道机器人造型设计
1
2020
... 管道机器人具有体积小、重量轻、进出管道灵活、驱动方式简单且易于适应不同的管道环境等特点[2 -4 ] ,目前主要有轮式[5 ] 、蠕动式[6 ] 、履带式[7 -8 ] 、脚式[9 ] 和螺旋式[10 ] 等几种形式.Zhang等[11 ] 提出了一种由行走机构和相机云台组成的轮式管道机器人,其具有良好的移动性能,并能自动纠正姿态以保持平衡.Nian等[12 ] 设计了一种具有管径、曲线适应能力和垂直爬升能力的管道机器人,提出了一种多级减速驱动、可伸缩式三轮爬坡机构.加拿大Inuktun Services公司开发了Versatrax系列管道机器人,用于管道内部检测,其中的一款采用履带作为行走机构,其两侧的履带以一定的夹角布置,通过角度调节可以改变管道机器人的周身尺寸,以适应不同的管径,但不能根据管径的变化进行实时调整[13 ] .Alireza等[14 ] 研制的轮式管道机器人KANTARO通过调整轮系处4根电推杆的伸缩量来改变轮系偏转角度,来适应不同的管径,但其工作空间相对较小.刘大伟等[15 ] 提出了一种由非圆齿轮和双轴偏心块组成的非对称惯性驱动管道机器人,研究了机器人在管道内的速度变化规律.张月等[9 ] 设计了一种风电叶片管道内窥履带机器人,该机器人主要由履带移动平台和四自由度关节构成,可实现抬头、转弯、爬坡等功能.梁亮等[16 ] 提出了一种内螺旋管道机器人,并优化了其在管道内的轴向推力. ...
城市下水管道机器人造型设计
1
2020
... 管道机器人具有体积小、重量轻、进出管道灵活、驱动方式简单且易于适应不同的管道环境等特点[2 -4 ] ,目前主要有轮式[5 ] 、蠕动式[6 ] 、履带式[7 -8 ] 、脚式[9 ] 和螺旋式[10 ] 等几种形式.Zhang等[11 ] 提出了一种由行走机构和相机云台组成的轮式管道机器人,其具有良好的移动性能,并能自动纠正姿态以保持平衡.Nian等[12 ] 设计了一种具有管径、曲线适应能力和垂直爬升能力的管道机器人,提出了一种多级减速驱动、可伸缩式三轮爬坡机构.加拿大Inuktun Services公司开发了Versatrax系列管道机器人,用于管道内部检测,其中的一款采用履带作为行走机构,其两侧的履带以一定的夹角布置,通过角度调节可以改变管道机器人的周身尺寸,以适应不同的管径,但不能根据管径的变化进行实时调整[13 ] .Alireza等[14 ] 研制的轮式管道机器人KANTARO通过调整轮系处4根电推杆的伸缩量来改变轮系偏转角度,来适应不同的管径,但其工作空间相对较小.刘大伟等[15 ] 提出了一种由非圆齿轮和双轴偏心块组成的非对称惯性驱动管道机器人,研究了机器人在管道内的速度变化规律.张月等[9 ] 设计了一种风电叶片管道内窥履带机器人,该机器人主要由履带移动平台和四自由度关节构成,可实现抬头、转弯、爬坡等功能.梁亮等[16 ] 提出了一种内螺旋管道机器人,并优化了其在管道内的轴向推力. ...
管道机器人结构与通过性分析
1
2021
... 管道机器人具有体积小、重量轻、进出管道灵活、驱动方式简单且易于适应不同的管道环境等特点[2 -4 ] ,目前主要有轮式[5 ] 、蠕动式[6 ] 、履带式[7 -8 ] 、脚式[9 ] 和螺旋式[10 ] 等几种形式.Zhang等[11 ] 提出了一种由行走机构和相机云台组成的轮式管道机器人,其具有良好的移动性能,并能自动纠正姿态以保持平衡.Nian等[12 ] 设计了一种具有管径、曲线适应能力和垂直爬升能力的管道机器人,提出了一种多级减速驱动、可伸缩式三轮爬坡机构.加拿大Inuktun Services公司开发了Versatrax系列管道机器人,用于管道内部检测,其中的一款采用履带作为行走机构,其两侧的履带以一定的夹角布置,通过角度调节可以改变管道机器人的周身尺寸,以适应不同的管径,但不能根据管径的变化进行实时调整[13 ] .Alireza等[14 ] 研制的轮式管道机器人KANTARO通过调整轮系处4根电推杆的伸缩量来改变轮系偏转角度,来适应不同的管径,但其工作空间相对较小.刘大伟等[15 ] 提出了一种由非圆齿轮和双轴偏心块组成的非对称惯性驱动管道机器人,研究了机器人在管道内的速度变化规律.张月等[9 ] 设计了一种风电叶片管道内窥履带机器人,该机器人主要由履带移动平台和四自由度关节构成,可实现抬头、转弯、爬坡等功能.梁亮等[16 ] 提出了一种内螺旋管道机器人,并优化了其在管道内的轴向推力. ...
管道机器人结构与通过性分析
1
2021
... 管道机器人具有体积小、重量轻、进出管道灵活、驱动方式简单且易于适应不同的管道环境等特点[2 -4 ] ,目前主要有轮式[5 ] 、蠕动式[6 ] 、履带式[7 -8 ] 、脚式[9 ] 和螺旋式[10 ] 等几种形式.Zhang等[11 ] 提出了一种由行走机构和相机云台组成的轮式管道机器人,其具有良好的移动性能,并能自动纠正姿态以保持平衡.Nian等[12 ] 设计了一种具有管径、曲线适应能力和垂直爬升能力的管道机器人,提出了一种多级减速驱动、可伸缩式三轮爬坡机构.加拿大Inuktun Services公司开发了Versatrax系列管道机器人,用于管道内部检测,其中的一款采用履带作为行走机构,其两侧的履带以一定的夹角布置,通过角度调节可以改变管道机器人的周身尺寸,以适应不同的管径,但不能根据管径的变化进行实时调整[13 ] .Alireza等[14 ] 研制的轮式管道机器人KANTARO通过调整轮系处4根电推杆的伸缩量来改变轮系偏转角度,来适应不同的管径,但其工作空间相对较小.刘大伟等[15 ] 提出了一种由非圆齿轮和双轴偏心块组成的非对称惯性驱动管道机器人,研究了机器人在管道内的速度变化规律.张月等[9 ] 设计了一种风电叶片管道内窥履带机器人,该机器人主要由履带移动平台和四自由度关节构成,可实现抬头、转弯、爬坡等功能.梁亮等[16 ] 提出了一种内螺旋管道机器人,并优化了其在管道内的轴向推力. ...
轮-履-腿复合仿生机器人步态规划及越障性能分析
1
2022
... 管道机器人具有体积小、重量轻、进出管道灵活、驱动方式简单且易于适应不同的管道环境等特点[2 -4 ] ,目前主要有轮式[5 ] 、蠕动式[6 ] 、履带式[7 -8 ] 、脚式[9 ] 和螺旋式[10 ] 等几种形式.Zhang等[11 ] 提出了一种由行走机构和相机云台组成的轮式管道机器人,其具有良好的移动性能,并能自动纠正姿态以保持平衡.Nian等[12 ] 设计了一种具有管径、曲线适应能力和垂直爬升能力的管道机器人,提出了一种多级减速驱动、可伸缩式三轮爬坡机构.加拿大Inuktun Services公司开发了Versatrax系列管道机器人,用于管道内部检测,其中的一款采用履带作为行走机构,其两侧的履带以一定的夹角布置,通过角度调节可以改变管道机器人的周身尺寸,以适应不同的管径,但不能根据管径的变化进行实时调整[13 ] .Alireza等[14 ] 研制的轮式管道机器人KANTARO通过调整轮系处4根电推杆的伸缩量来改变轮系偏转角度,来适应不同的管径,但其工作空间相对较小.刘大伟等[15 ] 提出了一种由非圆齿轮和双轴偏心块组成的非对称惯性驱动管道机器人,研究了机器人在管道内的速度变化规律.张月等[9 ] 设计了一种风电叶片管道内窥履带机器人,该机器人主要由履带移动平台和四自由度关节构成,可实现抬头、转弯、爬坡等功能.梁亮等[16 ] 提出了一种内螺旋管道机器人,并优化了其在管道内的轴向推力. ...
轮-履-腿复合仿生机器人步态规划及越障性能分析
1
2022
... 管道机器人具有体积小、重量轻、进出管道灵活、驱动方式简单且易于适应不同的管道环境等特点[2 -4 ] ,目前主要有轮式[5 ] 、蠕动式[6 ] 、履带式[7 -8 ] 、脚式[9 ] 和螺旋式[10 ] 等几种形式.Zhang等[11 ] 提出了一种由行走机构和相机云台组成的轮式管道机器人,其具有良好的移动性能,并能自动纠正姿态以保持平衡.Nian等[12 ] 设计了一种具有管径、曲线适应能力和垂直爬升能力的管道机器人,提出了一种多级减速驱动、可伸缩式三轮爬坡机构.加拿大Inuktun Services公司开发了Versatrax系列管道机器人,用于管道内部检测,其中的一款采用履带作为行走机构,其两侧的履带以一定的夹角布置,通过角度调节可以改变管道机器人的周身尺寸,以适应不同的管径,但不能根据管径的变化进行实时调整[13 ] .Alireza等[14 ] 研制的轮式管道机器人KANTARO通过调整轮系处4根电推杆的伸缩量来改变轮系偏转角度,来适应不同的管径,但其工作空间相对较小.刘大伟等[15 ] 提出了一种由非圆齿轮和双轴偏心块组成的非对称惯性驱动管道机器人,研究了机器人在管道内的速度变化规律.张月等[9 ] 设计了一种风电叶片管道内窥履带机器人,该机器人主要由履带移动平台和四自由度关节构成,可实现抬头、转弯、爬坡等功能.梁亮等[16 ] 提出了一种内螺旋管道机器人,并优化了其在管道内的轴向推力. ...
蠕动式管道机器人结构设计与运动特性分析
1
2022
... 管道机器人具有体积小、重量轻、进出管道灵活、驱动方式简单且易于适应不同的管道环境等特点[2 -4 ] ,目前主要有轮式[5 ] 、蠕动式[6 ] 、履带式[7 -8 ] 、脚式[9 ] 和螺旋式[10 ] 等几种形式.Zhang等[11 ] 提出了一种由行走机构和相机云台组成的轮式管道机器人,其具有良好的移动性能,并能自动纠正姿态以保持平衡.Nian等[12 ] 设计了一种具有管径、曲线适应能力和垂直爬升能力的管道机器人,提出了一种多级减速驱动、可伸缩式三轮爬坡机构.加拿大Inuktun Services公司开发了Versatrax系列管道机器人,用于管道内部检测,其中的一款采用履带作为行走机构,其两侧的履带以一定的夹角布置,通过角度调节可以改变管道机器人的周身尺寸,以适应不同的管径,但不能根据管径的变化进行实时调整[13 ] .Alireza等[14 ] 研制的轮式管道机器人KANTARO通过调整轮系处4根电推杆的伸缩量来改变轮系偏转角度,来适应不同的管径,但其工作空间相对较小.刘大伟等[15 ] 提出了一种由非圆齿轮和双轴偏心块组成的非对称惯性驱动管道机器人,研究了机器人在管道内的速度变化规律.张月等[9 ] 设计了一种风电叶片管道内窥履带机器人,该机器人主要由履带移动平台和四自由度关节构成,可实现抬头、转弯、爬坡等功能.梁亮等[16 ] 提出了一种内螺旋管道机器人,并优化了其在管道内的轴向推力. ...
蠕动式管道机器人结构设计与运动特性分析
1
2022
... 管道机器人具有体积小、重量轻、进出管道灵活、驱动方式简单且易于适应不同的管道环境等特点[2 -4 ] ,目前主要有轮式[5 ] 、蠕动式[6 ] 、履带式[7 -8 ] 、脚式[9 ] 和螺旋式[10 ] 等几种形式.Zhang等[11 ] 提出了一种由行走机构和相机云台组成的轮式管道机器人,其具有良好的移动性能,并能自动纠正姿态以保持平衡.Nian等[12 ] 设计了一种具有管径、曲线适应能力和垂直爬升能力的管道机器人,提出了一种多级减速驱动、可伸缩式三轮爬坡机构.加拿大Inuktun Services公司开发了Versatrax系列管道机器人,用于管道内部检测,其中的一款采用履带作为行走机构,其两侧的履带以一定的夹角布置,通过角度调节可以改变管道机器人的周身尺寸,以适应不同的管径,但不能根据管径的变化进行实时调整[13 ] .Alireza等[14 ] 研制的轮式管道机器人KANTARO通过调整轮系处4根电推杆的伸缩量来改变轮系偏转角度,来适应不同的管径,但其工作空间相对较小.刘大伟等[15 ] 提出了一种由非圆齿轮和双轴偏心块组成的非对称惯性驱动管道机器人,研究了机器人在管道内的速度变化规律.张月等[9 ] 设计了一种风电叶片管道内窥履带机器人,该机器人主要由履带移动平台和四自由度关节构成,可实现抬头、转弯、爬坡等功能.梁亮等[16 ] 提出了一种内螺旋管道机器人,并优化了其在管道内的轴向推力. ...
Design and implementation of four-link robot crawler with variable structure
1
2018
... 管道机器人具有体积小、重量轻、进出管道灵活、驱动方式简单且易于适应不同的管道环境等特点[2 -4 ] ,目前主要有轮式[5 ] 、蠕动式[6 ] 、履带式[7 -8 ] 、脚式[9 ] 和螺旋式[10 ] 等几种形式.Zhang等[11 ] 提出了一种由行走机构和相机云台组成的轮式管道机器人,其具有良好的移动性能,并能自动纠正姿态以保持平衡.Nian等[12 ] 设计了一种具有管径、曲线适应能力和垂直爬升能力的管道机器人,提出了一种多级减速驱动、可伸缩式三轮爬坡机构.加拿大Inuktun Services公司开发了Versatrax系列管道机器人,用于管道内部检测,其中的一款采用履带作为行走机构,其两侧的履带以一定的夹角布置,通过角度调节可以改变管道机器人的周身尺寸,以适应不同的管径,但不能根据管径的变化进行实时调整[13 ] .Alireza等[14 ] 研制的轮式管道机器人KANTARO通过调整轮系处4根电推杆的伸缩量来改变轮系偏转角度,来适应不同的管径,但其工作空间相对较小.刘大伟等[15 ] 提出了一种由非圆齿轮和双轴偏心块组成的非对称惯性驱动管道机器人,研究了机器人在管道内的速度变化规律.张月等[9 ] 设计了一种风电叶片管道内窥履带机器人,该机器人主要由履带移动平台和四自由度关节构成,可实现抬头、转弯、爬坡等功能.梁亮等[16 ] 提出了一种内螺旋管道机器人,并优化了其在管道内的轴向推力. ...
关节履带式管道检测机器人越障性能优化
1
2011
... 管道机器人具有体积小、重量轻、进出管道灵活、驱动方式简单且易于适应不同的管道环境等特点[2 -4 ] ,目前主要有轮式[5 ] 、蠕动式[6 ] 、履带式[7 -8 ] 、脚式[9 ] 和螺旋式[10 ] 等几种形式.Zhang等[11 ] 提出了一种由行走机构和相机云台组成的轮式管道机器人,其具有良好的移动性能,并能自动纠正姿态以保持平衡.Nian等[12 ] 设计了一种具有管径、曲线适应能力和垂直爬升能力的管道机器人,提出了一种多级减速驱动、可伸缩式三轮爬坡机构.加拿大Inuktun Services公司开发了Versatrax系列管道机器人,用于管道内部检测,其中的一款采用履带作为行走机构,其两侧的履带以一定的夹角布置,通过角度调节可以改变管道机器人的周身尺寸,以适应不同的管径,但不能根据管径的变化进行实时调整[13 ] .Alireza等[14 ] 研制的轮式管道机器人KANTARO通过调整轮系处4根电推杆的伸缩量来改变轮系偏转角度,来适应不同的管径,但其工作空间相对较小.刘大伟等[15 ] 提出了一种由非圆齿轮和双轴偏心块组成的非对称惯性驱动管道机器人,研究了机器人在管道内的速度变化规律.张月等[9 ] 设计了一种风电叶片管道内窥履带机器人,该机器人主要由履带移动平台和四自由度关节构成,可实现抬头、转弯、爬坡等功能.梁亮等[16 ] 提出了一种内螺旋管道机器人,并优化了其在管道内的轴向推力. ...
关节履带式管道检测机器人越障性能优化
1
2011
... 管道机器人具有体积小、重量轻、进出管道灵活、驱动方式简单且易于适应不同的管道环境等特点[2 -4 ] ,目前主要有轮式[5 ] 、蠕动式[6 ] 、履带式[7 -8 ] 、脚式[9 ] 和螺旋式[10 ] 等几种形式.Zhang等[11 ] 提出了一种由行走机构和相机云台组成的轮式管道机器人,其具有良好的移动性能,并能自动纠正姿态以保持平衡.Nian等[12 ] 设计了一种具有管径、曲线适应能力和垂直爬升能力的管道机器人,提出了一种多级减速驱动、可伸缩式三轮爬坡机构.加拿大Inuktun Services公司开发了Versatrax系列管道机器人,用于管道内部检测,其中的一款采用履带作为行走机构,其两侧的履带以一定的夹角布置,通过角度调节可以改变管道机器人的周身尺寸,以适应不同的管径,但不能根据管径的变化进行实时调整[13 ] .Alireza等[14 ] 研制的轮式管道机器人KANTARO通过调整轮系处4根电推杆的伸缩量来改变轮系偏转角度,来适应不同的管径,但其工作空间相对较小.刘大伟等[15 ] 提出了一种由非圆齿轮和双轴偏心块组成的非对称惯性驱动管道机器人,研究了机器人在管道内的速度变化规律.张月等[9 ] 设计了一种风电叶片管道内窥履带机器人,该机器人主要由履带移动平台和四自由度关节构成,可实现抬头、转弯、爬坡等功能.梁亮等[16 ] 提出了一种内螺旋管道机器人,并优化了其在管道内的轴向推力. ...
风电叶片管道内窥履带机器人的设计与运动分析
2
2021
... 管道机器人具有体积小、重量轻、进出管道灵活、驱动方式简单且易于适应不同的管道环境等特点[2 -4 ] ,目前主要有轮式[5 ] 、蠕动式[6 ] 、履带式[7 -8 ] 、脚式[9 ] 和螺旋式[10 ] 等几种形式.Zhang等[11 ] 提出了一种由行走机构和相机云台组成的轮式管道机器人,其具有良好的移动性能,并能自动纠正姿态以保持平衡.Nian等[12 ] 设计了一种具有管径、曲线适应能力和垂直爬升能力的管道机器人,提出了一种多级减速驱动、可伸缩式三轮爬坡机构.加拿大Inuktun Services公司开发了Versatrax系列管道机器人,用于管道内部检测,其中的一款采用履带作为行走机构,其两侧的履带以一定的夹角布置,通过角度调节可以改变管道机器人的周身尺寸,以适应不同的管径,但不能根据管径的变化进行实时调整[13 ] .Alireza等[14 ] 研制的轮式管道机器人KANTARO通过调整轮系处4根电推杆的伸缩量来改变轮系偏转角度,来适应不同的管径,但其工作空间相对较小.刘大伟等[15 ] 提出了一种由非圆齿轮和双轴偏心块组成的非对称惯性驱动管道机器人,研究了机器人在管道内的速度变化规律.张月等[9 ] 设计了一种风电叶片管道内窥履带机器人,该机器人主要由履带移动平台和四自由度关节构成,可实现抬头、转弯、爬坡等功能.梁亮等[16 ] 提出了一种内螺旋管道机器人,并优化了其在管道内的轴向推力. ...
... [9 ]设计了一种风电叶片管道内窥履带机器人,该机器人主要由履带移动平台和四自由度关节构成,可实现抬头、转弯、爬坡等功能.梁亮等[16 ] 提出了一种内螺旋管道机器人,并优化了其在管道内的轴向推力. ...
风电叶片管道内窥履带机器人的设计与运动分析
2
2021
... 管道机器人具有体积小、重量轻、进出管道灵活、驱动方式简单且易于适应不同的管道环境等特点[2 -4 ] ,目前主要有轮式[5 ] 、蠕动式[6 ] 、履带式[7 -8 ] 、脚式[9 ] 和螺旋式[10 ] 等几种形式.Zhang等[11 ] 提出了一种由行走机构和相机云台组成的轮式管道机器人,其具有良好的移动性能,并能自动纠正姿态以保持平衡.Nian等[12 ] 设计了一种具有管径、曲线适应能力和垂直爬升能力的管道机器人,提出了一种多级减速驱动、可伸缩式三轮爬坡机构.加拿大Inuktun Services公司开发了Versatrax系列管道机器人,用于管道内部检测,其中的一款采用履带作为行走机构,其两侧的履带以一定的夹角布置,通过角度调节可以改变管道机器人的周身尺寸,以适应不同的管径,但不能根据管径的变化进行实时调整[13 ] .Alireza等[14 ] 研制的轮式管道机器人KANTARO通过调整轮系处4根电推杆的伸缩量来改变轮系偏转角度,来适应不同的管径,但其工作空间相对较小.刘大伟等[15 ] 提出了一种由非圆齿轮和双轴偏心块组成的非对称惯性驱动管道机器人,研究了机器人在管道内的速度变化规律.张月等[9 ] 设计了一种风电叶片管道内窥履带机器人,该机器人主要由履带移动平台和四自由度关节构成,可实现抬头、转弯、爬坡等功能.梁亮等[16 ] 提出了一种内螺旋管道机器人,并优化了其在管道内的轴向推力. ...
... [9 ]设计了一种风电叶片管道内窥履带机器人,该机器人主要由履带移动平台和四自由度关节构成,可实现抬头、转弯、爬坡等功能.梁亮等[16 ] 提出了一种内螺旋管道机器人,并优化了其在管道内的轴向推力. ...
一种管道机器人的自适应主动螺旋式驱动机理分析
1
2018
... 管道机器人具有体积小、重量轻、进出管道灵活、驱动方式简单且易于适应不同的管道环境等特点[2 -4 ] ,目前主要有轮式[5 ] 、蠕动式[6 ] 、履带式[7 -8 ] 、脚式[9 ] 和螺旋式[10 ] 等几种形式.Zhang等[11 ] 提出了一种由行走机构和相机云台组成的轮式管道机器人,其具有良好的移动性能,并能自动纠正姿态以保持平衡.Nian等[12 ] 设计了一种具有管径、曲线适应能力和垂直爬升能力的管道机器人,提出了一种多级减速驱动、可伸缩式三轮爬坡机构.加拿大Inuktun Services公司开发了Versatrax系列管道机器人,用于管道内部检测,其中的一款采用履带作为行走机构,其两侧的履带以一定的夹角布置,通过角度调节可以改变管道机器人的周身尺寸,以适应不同的管径,但不能根据管径的变化进行实时调整[13 ] .Alireza等[14 ] 研制的轮式管道机器人KANTARO通过调整轮系处4根电推杆的伸缩量来改变轮系偏转角度,来适应不同的管径,但其工作空间相对较小.刘大伟等[15 ] 提出了一种由非圆齿轮和双轴偏心块组成的非对称惯性驱动管道机器人,研究了机器人在管道内的速度变化规律.张月等[9 ] 设计了一种风电叶片管道内窥履带机器人,该机器人主要由履带移动平台和四自由度关节构成,可实现抬头、转弯、爬坡等功能.梁亮等[16 ] 提出了一种内螺旋管道机器人,并优化了其在管道内的轴向推力. ...
一种管道机器人的自适应主动螺旋式驱动机理分析
1
2018
... 管道机器人具有体积小、重量轻、进出管道灵活、驱动方式简单且易于适应不同的管道环境等特点[2 -4 ] ,目前主要有轮式[5 ] 、蠕动式[6 ] 、履带式[7 -8 ] 、脚式[9 ] 和螺旋式[10 ] 等几种形式.Zhang等[11 ] 提出了一种由行走机构和相机云台组成的轮式管道机器人,其具有良好的移动性能,并能自动纠正姿态以保持平衡.Nian等[12 ] 设计了一种具有管径、曲线适应能力和垂直爬升能力的管道机器人,提出了一种多级减速驱动、可伸缩式三轮爬坡机构.加拿大Inuktun Services公司开发了Versatrax系列管道机器人,用于管道内部检测,其中的一款采用履带作为行走机构,其两侧的履带以一定的夹角布置,通过角度调节可以改变管道机器人的周身尺寸,以适应不同的管径,但不能根据管径的变化进行实时调整[13 ] .Alireza等[14 ] 研制的轮式管道机器人KANTARO通过调整轮系处4根电推杆的伸缩量来改变轮系偏转角度,来适应不同的管径,但其工作空间相对较小.刘大伟等[15 ] 提出了一种由非圆齿轮和双轴偏心块组成的非对称惯性驱动管道机器人,研究了机器人在管道内的速度变化规律.张月等[9 ] 设计了一种风电叶片管道内窥履带机器人,该机器人主要由履带移动平台和四自由度关节构成,可实现抬头、转弯、爬坡等功能.梁亮等[16 ] 提出了一种内螺旋管道机器人,并优化了其在管道内的轴向推力. ...
Hardware design of a pipeline inspection robot
1
2012
... 管道机器人具有体积小、重量轻、进出管道灵活、驱动方式简单且易于适应不同的管道环境等特点[2 -4 ] ,目前主要有轮式[5 ] 、蠕动式[6 ] 、履带式[7 -8 ] 、脚式[9 ] 和螺旋式[10 ] 等几种形式.Zhang等[11 ] 提出了一种由行走机构和相机云台组成的轮式管道机器人,其具有良好的移动性能,并能自动纠正姿态以保持平衡.Nian等[12 ] 设计了一种具有管径、曲线适应能力和垂直爬升能力的管道机器人,提出了一种多级减速驱动、可伸缩式三轮爬坡机构.加拿大Inuktun Services公司开发了Versatrax系列管道机器人,用于管道内部检测,其中的一款采用履带作为行走机构,其两侧的履带以一定的夹角布置,通过角度调节可以改变管道机器人的周身尺寸,以适应不同的管径,但不能根据管径的变化进行实时调整[13 ] .Alireza等[14 ] 研制的轮式管道机器人KANTARO通过调整轮系处4根电推杆的伸缩量来改变轮系偏转角度,来适应不同的管径,但其工作空间相对较小.刘大伟等[15 ] 提出了一种由非圆齿轮和双轴偏心块组成的非对称惯性驱动管道机器人,研究了机器人在管道内的速度变化规律.张月等[9 ] 设计了一种风电叶片管道内窥履带机器人,该机器人主要由履带移动平台和四自由度关节构成,可实现抬头、转弯、爬坡等功能.梁亮等[16 ] 提出了一种内螺旋管道机器人,并优化了其在管道内的轴向推力. ...
Based on the three-dimensional pipeline network of a new type of wheel pipeline robot structure design and simulation
1
2015
... 管道机器人具有体积小、重量轻、进出管道灵活、驱动方式简单且易于适应不同的管道环境等特点[2 -4 ] ,目前主要有轮式[5 ] 、蠕动式[6 ] 、履带式[7 -8 ] 、脚式[9 ] 和螺旋式[10 ] 等几种形式.Zhang等[11 ] 提出了一种由行走机构和相机云台组成的轮式管道机器人,其具有良好的移动性能,并能自动纠正姿态以保持平衡.Nian等[12 ] 设计了一种具有管径、曲线适应能力和垂直爬升能力的管道机器人,提出了一种多级减速驱动、可伸缩式三轮爬坡机构.加拿大Inuktun Services公司开发了Versatrax系列管道机器人,用于管道内部检测,其中的一款采用履带作为行走机构,其两侧的履带以一定的夹角布置,通过角度调节可以改变管道机器人的周身尺寸,以适应不同的管径,但不能根据管径的变化进行实时调整[13 ] .Alireza等[14 ] 研制的轮式管道机器人KANTARO通过调整轮系处4根电推杆的伸缩量来改变轮系偏转角度,来适应不同的管径,但其工作空间相对较小.刘大伟等[15 ] 提出了一种由非圆齿轮和双轴偏心块组成的非对称惯性驱动管道机器人,研究了机器人在管道内的速度变化规律.张月等[9 ] 设计了一种风电叶片管道内窥履带机器人,该机器人主要由履带移动平台和四自由度关节构成,可实现抬头、转弯、爬坡等功能.梁亮等[16 ] 提出了一种内螺旋管道机器人,并优化了其在管道内的轴向推力. ...
管道机器人的研究现状及其展望
1
2019
... 管道机器人具有体积小、重量轻、进出管道灵活、驱动方式简单且易于适应不同的管道环境等特点[2 -4 ] ,目前主要有轮式[5 ] 、蠕动式[6 ] 、履带式[7 -8 ] 、脚式[9 ] 和螺旋式[10 ] 等几种形式.Zhang等[11 ] 提出了一种由行走机构和相机云台组成的轮式管道机器人,其具有良好的移动性能,并能自动纠正姿态以保持平衡.Nian等[12 ] 设计了一种具有管径、曲线适应能力和垂直爬升能力的管道机器人,提出了一种多级减速驱动、可伸缩式三轮爬坡机构.加拿大Inuktun Services公司开发了Versatrax系列管道机器人,用于管道内部检测,其中的一款采用履带作为行走机构,其两侧的履带以一定的夹角布置,通过角度调节可以改变管道机器人的周身尺寸,以适应不同的管径,但不能根据管径的变化进行实时调整[13 ] .Alireza等[14 ] 研制的轮式管道机器人KANTARO通过调整轮系处4根电推杆的伸缩量来改变轮系偏转角度,来适应不同的管径,但其工作空间相对较小.刘大伟等[15 ] 提出了一种由非圆齿轮和双轴偏心块组成的非对称惯性驱动管道机器人,研究了机器人在管道内的速度变化规律.张月等[9 ] 设计了一种风电叶片管道内窥履带机器人,该机器人主要由履带移动平台和四自由度关节构成,可实现抬头、转弯、爬坡等功能.梁亮等[16 ] 提出了一种内螺旋管道机器人,并优化了其在管道内的轴向推力. ...
管道机器人的研究现状及其展望
1
2019
... 管道机器人具有体积小、重量轻、进出管道灵活、驱动方式简单且易于适应不同的管道环境等特点[2 -4 ] ,目前主要有轮式[5 ] 、蠕动式[6 ] 、履带式[7 -8 ] 、脚式[9 ] 和螺旋式[10 ] 等几种形式.Zhang等[11 ] 提出了一种由行走机构和相机云台组成的轮式管道机器人,其具有良好的移动性能,并能自动纠正姿态以保持平衡.Nian等[12 ] 设计了一种具有管径、曲线适应能力和垂直爬升能力的管道机器人,提出了一种多级减速驱动、可伸缩式三轮爬坡机构.加拿大Inuktun Services公司开发了Versatrax系列管道机器人,用于管道内部检测,其中的一款采用履带作为行走机构,其两侧的履带以一定的夹角布置,通过角度调节可以改变管道机器人的周身尺寸,以适应不同的管径,但不能根据管径的变化进行实时调整[13 ] .Alireza等[14 ] 研制的轮式管道机器人KANTARO通过调整轮系处4根电推杆的伸缩量来改变轮系偏转角度,来适应不同的管径,但其工作空间相对较小.刘大伟等[15 ] 提出了一种由非圆齿轮和双轴偏心块组成的非对称惯性驱动管道机器人,研究了机器人在管道内的速度变化规律.张月等[9 ] 设计了一种风电叶片管道内窥履带机器人,该机器人主要由履带移动平台和四自由度关节构成,可实现抬头、转弯、爬坡等功能.梁亮等[16 ] 提出了一种内螺旋管道机器人,并优化了其在管道内的轴向推力. ...
A laser scanner for landmark detection with the sewer inspection Robot KANTARO
1
... 管道机器人具有体积小、重量轻、进出管道灵活、驱动方式简单且易于适应不同的管道环境等特点[2 -4 ] ,目前主要有轮式[5 ] 、蠕动式[6 ] 、履带式[7 -8 ] 、脚式[9 ] 和螺旋式[10 ] 等几种形式.Zhang等[11 ] 提出了一种由行走机构和相机云台组成的轮式管道机器人,其具有良好的移动性能,并能自动纠正姿态以保持平衡.Nian等[12 ] 设计了一种具有管径、曲线适应能力和垂直爬升能力的管道机器人,提出了一种多级减速驱动、可伸缩式三轮爬坡机构.加拿大Inuktun Services公司开发了Versatrax系列管道机器人,用于管道内部检测,其中的一款采用履带作为行走机构,其两侧的履带以一定的夹角布置,通过角度调节可以改变管道机器人的周身尺寸,以适应不同的管径,但不能根据管径的变化进行实时调整[13 ] .Alireza等[14 ] 研制的轮式管道机器人KANTARO通过调整轮系处4根电推杆的伸缩量来改变轮系偏转角度,来适应不同的管径,但其工作空间相对较小.刘大伟等[15 ] 提出了一种由非圆齿轮和双轴偏心块组成的非对称惯性驱动管道机器人,研究了机器人在管道内的速度变化规律.张月等[9 ] 设计了一种风电叶片管道内窥履带机器人,该机器人主要由履带移动平台和四自由度关节构成,可实现抬头、转弯、爬坡等功能.梁亮等[16 ] 提出了一种内螺旋管道机器人,并优化了其在管道内的轴向推力. ...
面向管道机器人的非对称惯性驱动系统及其动力学特性
1
2020
... 管道机器人具有体积小、重量轻、进出管道灵活、驱动方式简单且易于适应不同的管道环境等特点[2 -4 ] ,目前主要有轮式[5 ] 、蠕动式[6 ] 、履带式[7 -8 ] 、脚式[9 ] 和螺旋式[10 ] 等几种形式.Zhang等[11 ] 提出了一种由行走机构和相机云台组成的轮式管道机器人,其具有良好的移动性能,并能自动纠正姿态以保持平衡.Nian等[12 ] 设计了一种具有管径、曲线适应能力和垂直爬升能力的管道机器人,提出了一种多级减速驱动、可伸缩式三轮爬坡机构.加拿大Inuktun Services公司开发了Versatrax系列管道机器人,用于管道内部检测,其中的一款采用履带作为行走机构,其两侧的履带以一定的夹角布置,通过角度调节可以改变管道机器人的周身尺寸,以适应不同的管径,但不能根据管径的变化进行实时调整[13 ] .Alireza等[14 ] 研制的轮式管道机器人KANTARO通过调整轮系处4根电推杆的伸缩量来改变轮系偏转角度,来适应不同的管径,但其工作空间相对较小.刘大伟等[15 ] 提出了一种由非圆齿轮和双轴偏心块组成的非对称惯性驱动管道机器人,研究了机器人在管道内的速度变化规律.张月等[9 ] 设计了一种风电叶片管道内窥履带机器人,该机器人主要由履带移动平台和四自由度关节构成,可实现抬头、转弯、爬坡等功能.梁亮等[16 ] 提出了一种内螺旋管道机器人,并优化了其在管道内的轴向推力. ...
面向管道机器人的非对称惯性驱动系统及其动力学特性
1
2020
... 管道机器人具有体积小、重量轻、进出管道灵活、驱动方式简单且易于适应不同的管道环境等特点[2 -4 ] ,目前主要有轮式[5 ] 、蠕动式[6 ] 、履带式[7 -8 ] 、脚式[9 ] 和螺旋式[10 ] 等几种形式.Zhang等[11 ] 提出了一种由行走机构和相机云台组成的轮式管道机器人,其具有良好的移动性能,并能自动纠正姿态以保持平衡.Nian等[12 ] 设计了一种具有管径、曲线适应能力和垂直爬升能力的管道机器人,提出了一种多级减速驱动、可伸缩式三轮爬坡机构.加拿大Inuktun Services公司开发了Versatrax系列管道机器人,用于管道内部检测,其中的一款采用履带作为行走机构,其两侧的履带以一定的夹角布置,通过角度调节可以改变管道机器人的周身尺寸,以适应不同的管径,但不能根据管径的变化进行实时调整[13 ] .Alireza等[14 ] 研制的轮式管道机器人KANTARO通过调整轮系处4根电推杆的伸缩量来改变轮系偏转角度,来适应不同的管径,但其工作空间相对较小.刘大伟等[15 ] 提出了一种由非圆齿轮和双轴偏心块组成的非对称惯性驱动管道机器人,研究了机器人在管道内的速度变化规律.张月等[9 ] 设计了一种风电叶片管道内窥履带机器人,该机器人主要由履带移动平台和四自由度关节构成,可实现抬头、转弯、爬坡等功能.梁亮等[16 ] 提出了一种内螺旋管道机器人,并优化了其在管道内的轴向推力. ...
一种内螺旋管道机器人
1
2014
... 管道机器人具有体积小、重量轻、进出管道灵活、驱动方式简单且易于适应不同的管道环境等特点[2 -4 ] ,目前主要有轮式[5 ] 、蠕动式[6 ] 、履带式[7 -8 ] 、脚式[9 ] 和螺旋式[10 ] 等几种形式.Zhang等[11 ] 提出了一种由行走机构和相机云台组成的轮式管道机器人,其具有良好的移动性能,并能自动纠正姿态以保持平衡.Nian等[12 ] 设计了一种具有管径、曲线适应能力和垂直爬升能力的管道机器人,提出了一种多级减速驱动、可伸缩式三轮爬坡机构.加拿大Inuktun Services公司开发了Versatrax系列管道机器人,用于管道内部检测,其中的一款采用履带作为行走机构,其两侧的履带以一定的夹角布置,通过角度调节可以改变管道机器人的周身尺寸,以适应不同的管径,但不能根据管径的变化进行实时调整[13 ] .Alireza等[14 ] 研制的轮式管道机器人KANTARO通过调整轮系处4根电推杆的伸缩量来改变轮系偏转角度,来适应不同的管径,但其工作空间相对较小.刘大伟等[15 ] 提出了一种由非圆齿轮和双轴偏心块组成的非对称惯性驱动管道机器人,研究了机器人在管道内的速度变化规律.张月等[9 ] 设计了一种风电叶片管道内窥履带机器人,该机器人主要由履带移动平台和四自由度关节构成,可实现抬头、转弯、爬坡等功能.梁亮等[16 ] 提出了一种内螺旋管道机器人,并优化了其在管道内的轴向推力. ...
一种内螺旋管道机器人
1
2014
... 管道机器人具有体积小、重量轻、进出管道灵活、驱动方式简单且易于适应不同的管道环境等特点[2 -4 ] ,目前主要有轮式[5 ] 、蠕动式[6 ] 、履带式[7 -8 ] 、脚式[9 ] 和螺旋式[10 ] 等几种形式.Zhang等[11 ] 提出了一种由行走机构和相机云台组成的轮式管道机器人,其具有良好的移动性能,并能自动纠正姿态以保持平衡.Nian等[12 ] 设计了一种具有管径、曲线适应能力和垂直爬升能力的管道机器人,提出了一种多级减速驱动、可伸缩式三轮爬坡机构.加拿大Inuktun Services公司开发了Versatrax系列管道机器人,用于管道内部检测,其中的一款采用履带作为行走机构,其两侧的履带以一定的夹角布置,通过角度调节可以改变管道机器人的周身尺寸,以适应不同的管径,但不能根据管径的变化进行实时调整[13 ] .Alireza等[14 ] 研制的轮式管道机器人KANTARO通过调整轮系处4根电推杆的伸缩量来改变轮系偏转角度,来适应不同的管径,但其工作空间相对较小.刘大伟等[15 ] 提出了一种由非圆齿轮和双轴偏心块组成的非对称惯性驱动管道机器人,研究了机器人在管道内的速度变化规律.张月等[9 ] 设计了一种风电叶片管道内窥履带机器人,该机器人主要由履带移动平台和四自由度关节构成,可实现抬头、转弯、爬坡等功能.梁亮等[16 ] 提出了一种内螺旋管道机器人,并优化了其在管道内的轴向推力. ...
可适径调整的并联式管道清淤机器人
1
... 采用模块化设计的思路,管道清淤机器人分为车体、行走装置、工作装置和辅助导向装置等四部分[17 ] ,如图1 所示. ...
可适径调整的并联式管道清淤机器人
1
... 采用模块化设计的思路,管道清淤机器人分为车体、行走装置、工作装置和辅助导向装置等四部分[17 ] ,如图1 所示. ...
Bundle folding type Ⅲ Bricard linkages
1
2020
... 行走装置主要由履带和折展机构[18 ] 组成.相较于轮式结构,履带式结构具有更好的越障能力,其重量大,重心低,易于保护,可以有效保证机器人在运动过程中的稳定性.在非工作状态下履带可以收藏于车体内,有利于减小机器人的体积. ...
基于旋量理论的3-US并联机构运动学分析
1
2014
... 工作装置由驱动电机、3-US并联机构[19 -20 ] 和清淤机头组成.其安装于车体的中心部位,可沿车体中心轴线伸缩,工作时可完成俯仰、平移等运动. ...
基于旋量理论的3-US并联机构运动学分析
1
2014
... 工作装置由驱动电机、3-US并联机构[19 -20 ] 和清淤机头组成.其安装于车体的中心部位,可沿车体中心轴线伸缩,工作时可完成俯仰、平移等运动. ...
基于并联机构的双重驱动管道机器人设计与研究
1
2020
... 工作装置由驱动电机、3-US并联机构[19 -20 ] 和清淤机头组成.其安装于车体的中心部位,可沿车体中心轴线伸缩,工作时可完成俯仰、平移等运动. ...
基于并联机构的双重驱动管道机器人设计与研究
1
2020
... 工作装置由驱动电机、3-US并联机构[19 -20 ] 和清淤机头组成.其安装于车体的中心部位,可沿车体中心轴线伸缩,工作时可完成俯仰、平移等运动. ...






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}