可适径调整管道清淤机器人结构设计与运动分析
Structure design and motion analysis of pipeline dredging robot with diameter adjustment
可适径调整管道清淤机器人结构设计与运动分析 |
| 李岳,邓云蛟,敖然,侯雨雷,曾达幸 |
|
Structure design and motion analysis of pipeline dredging robot with diameter adjustment |
| Yue LI,Yunjiao DENG,Ran AO,Yulei HOU,Daxing ZENG |
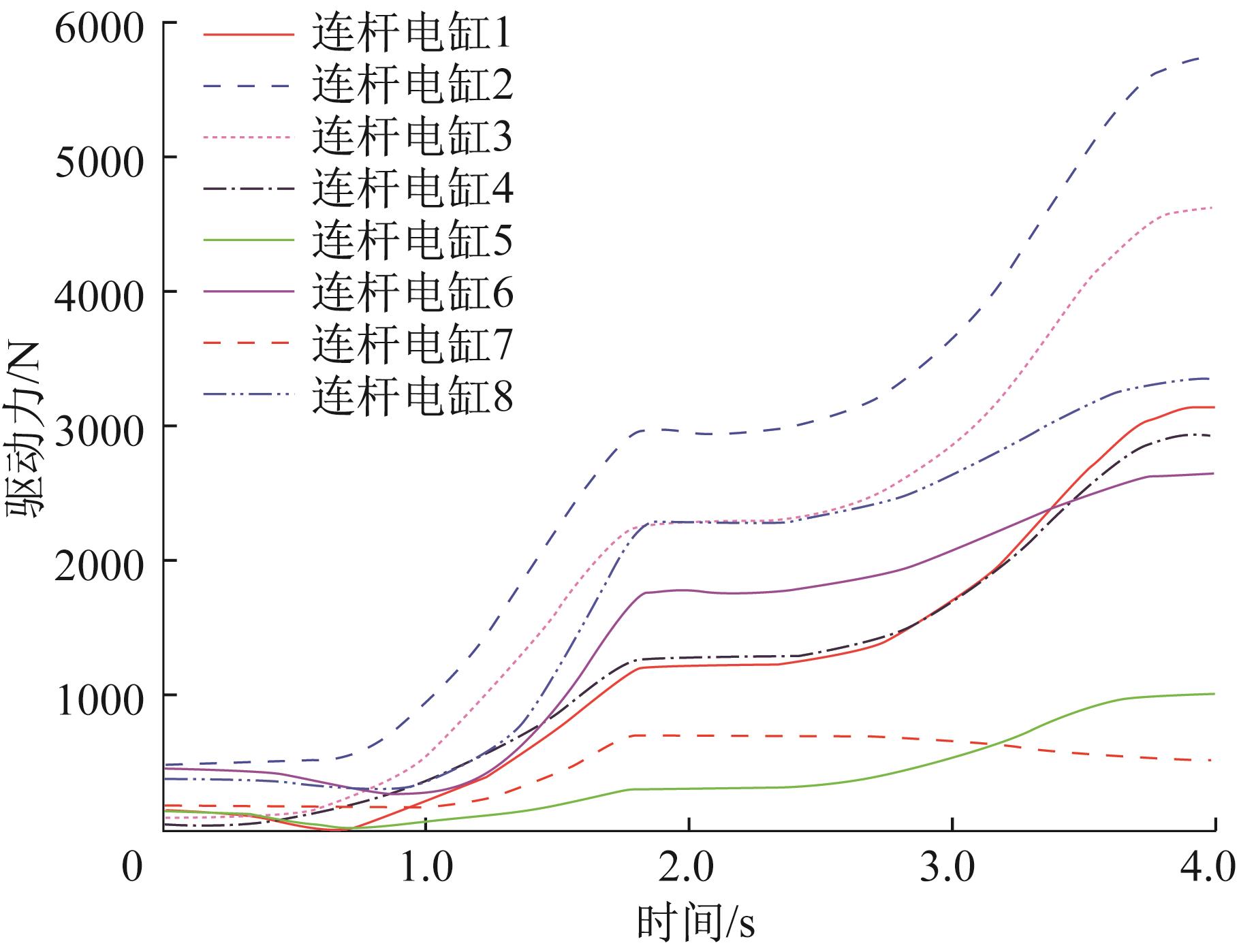
| 图13 行走装置进行折展运动时连杆电缸驱动力变化曲线 |
| Fig.13 Variation curve of electric cylinder driving force of connecting rod during folding motion of walking device |
|
|