


本文链接:
根据骨架结构的不同,柔性连续体机械臂可分为刚性骨架连续体机械臂与柔性骨架连续体机械臂[14-15]。刚性骨架连续体机械臂的骨架结构多由弹簧与间隔盘组成。Hannan等人[16]利用多个拉伸弹簧作为骨架结构,制作了仿象鼻的连续体机械臂。Morales Bieze等人[17]设计了一种基于骨架脊柱的外力驱动可变形连续体机械臂,其利用空心脊椎来防止各模块碰撞,从而限制了局部变形。牛景达[18]提出了一种由扭簧和间隔盘组成的可旋转的多模块连续体机械臂,通过转动2根驱动绳来实现机械臂的旋转运动。柔性骨架连续体机械臂的骨架结构大多采用人工肌肉、波纹管等材料制成。Walker等人[19]、McMahan等人[20-21]从气体驱动器和章鱼触手中得到启发,研制了由气动人工肌肉驱动的连续体机械臂OctArm,可通过对人工肌肉充气来实现机械臂的伸展和弯曲。Chen等人[22]提出了一种基于波纹管的模块化气动柔性机械臂,波纹管在加压气体的驱动下实现伸展。Zhang等人[23]设计了一种无弹性骨架、混合驱动的管状折纸连续体机械臂,利用管状折纸结构作为骨架结构,以较低的输入压力产生驱动,形成较高的伸展比。
然而,柔性骨架固有的低刚度导致连续体机械臂存在径向刚度不足、稳定性差及工作空间小等缺陷。此外,现有的柔性连续体机械臂多采用线驱动方式,弯曲运动的驱动绳与旋转运动的驱动绳会相互干扰,故其只能实现单一的弯曲或旋转运动,而无法实现组合运动。滚动接触作为一种特殊的接触方式,具有摩擦小、轴向刚度大和旋转角度大的优点[24-25]。将滚动接触模块作为连续体机械臂的骨架结构,可有效增大接触面积和提高径向刚度[26]。此外,滚动接触对滚动面没有位置要求,这可为同一模块多自由度的集成提供有利条件。Suh等人[27]采用弹性绳连接模块并利用摩擦实现运动,设计了一种基于滚动接触的连续体机器人。董栋[28]利用滚动接触面限制模块运动,设计了一款仿脊椎多向连续体机械臂。但是,现有的滚动接触连续体机械臂仅解决了刚度不足的问题,仍存在无法实现单模块多自由度运动的问题。
为此,本文设计了一种基于滚动接触的单模块多自由度柔性连续体机械臂,以解决现有机械臂只能实现单一的弯曲或旋转运动的问题。首先,对新型柔性连续体机械臂的研究思路、结构设计方案以及工作原理进行介绍;然后,构建机械臂的运动学模型,并通过搭建机械臂样机来开展多组弯曲与旋转的组合运动实验,以分析机械臂的性能以及验证机械臂结构设计的可行性。
1 柔性连续体机械臂设计
1.1 研究思路
如图1(a)所示,传统的线驱动柔性连续体机械臂通过不同的排线方式来实现弯曲和旋转功能。但是,由于弯曲运动与旋转运动对应的排线方式互斥,无法将弯曲与旋转运动集成于同一模块,因此现有的柔性连续体机械臂无法实现弯曲与旋转的组合运动,难以满足各行业对机械臂的工作要求。此外,现有柔性连续体机械臂还存在径向刚度不足、稳定性差等问题。鉴于滚动接触对滚动面无位置要求,可实现柔性连续体机械臂的分部式结构,且在实现高精度弯曲运动的同时可保持轴向的高刚度,本文结合滚动接触提出了一种新型的线驱动柔性连续体机械臂,其结构如图1(b)所示:外部为基于滚动接触的弯曲模块,内部为基于弹簧和旋转结构的旋转模块。该柔性连续体机械臂不仅可实现弯曲与旋转自由度共存,而且具备较高的轴向刚度与运动精确性。
图1
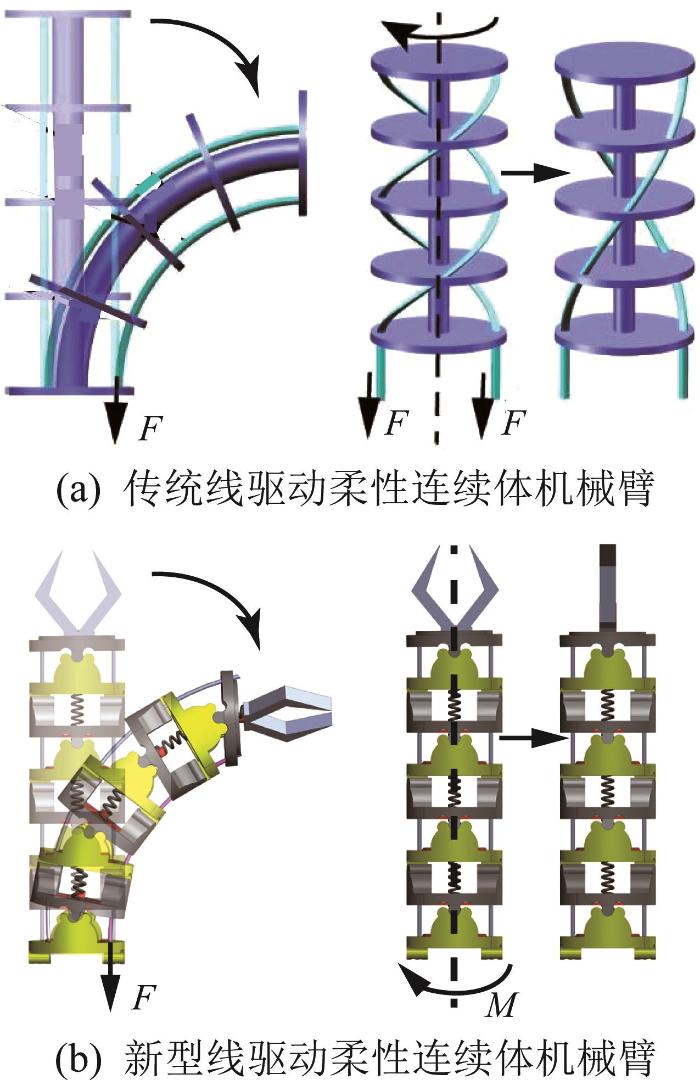
图1
线驱动柔性连续体机械臂结构对比
Fig.1
Structure comparison of linear driven flexible continuum robotic arms
1.2 结构设计与工作原理
本文所提出的基于滚动接触的单模块多自由度柔性连续体机械臂的整体结构如图2(a)所示。该机械臂采用模块化设计,其主要结构包括弯曲外盘、旋转内盘、连接弹簧、驱动绳、抓手和内部的连接弹性绳。弯曲外盘的上下两模块层层交错叠加,并由弹性绳于内部贯穿连接,形成机械臂的弯曲部分。内部连接弹簧贯穿整个机械臂与旋转内盘,弹簧在连接旋转内盘的同时,与弯曲外盘的中空部分共同限制了旋转内盘的位置。旋转部分放置在弯曲部分内部,两者集成在一起既能提升机械臂的整体轴向刚度,又能保证弯曲与旋转功能各自独立,互不干涉,即可实现在外盘弯曲的同时内盘旋转,内盘旋转的同时外盘弯曲。
图2
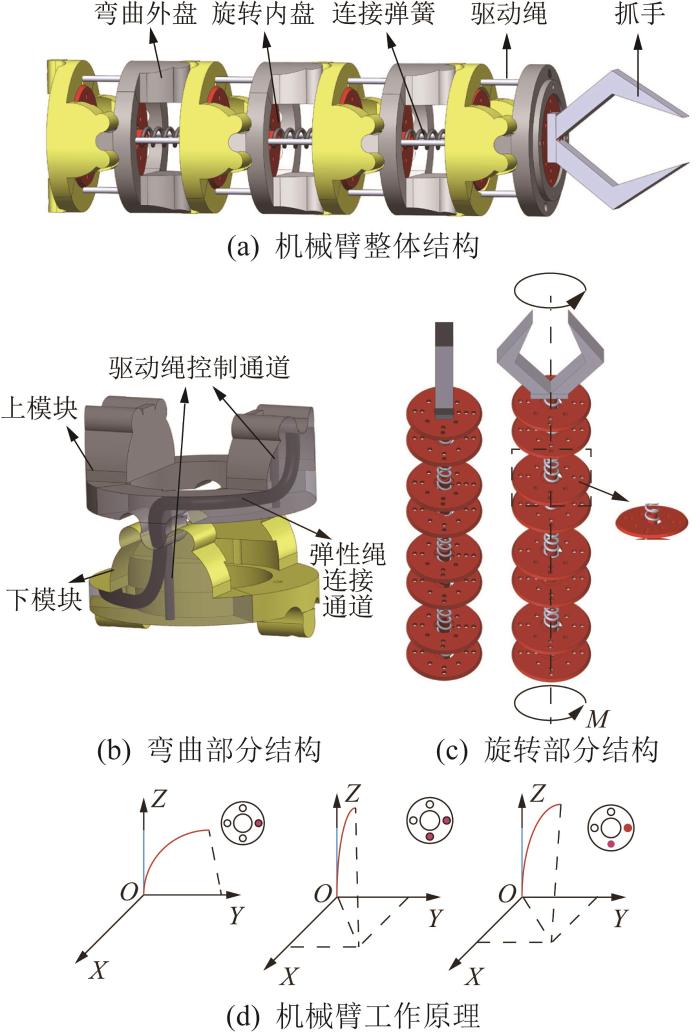
图2
基于滚动接触的单模块多自由度柔性连续体机械臂
Fig.2
Single-module multi-degree-of-freedom flexible continuum robotic arm based on rolling contact
为实现机械臂的灵活运动,以90°圆周分布的形式布置各模块的相邻驱动绳。机械臂的工作原理如图2(d)所示,圆内不同色块表示拉力的大小。当只有1个力拉动驱动绳时,机械臂朝拉力方向弯曲;当有2个相同大小的力拉动驱动绳时,机械臂朝2个拉力的中间方向弯曲;当有2个不同大小的力拉动驱动绳时,机械臂向拉力更大的一侧偏转。
2 柔性连续体机械臂运动学分析
2.1 运动学建模
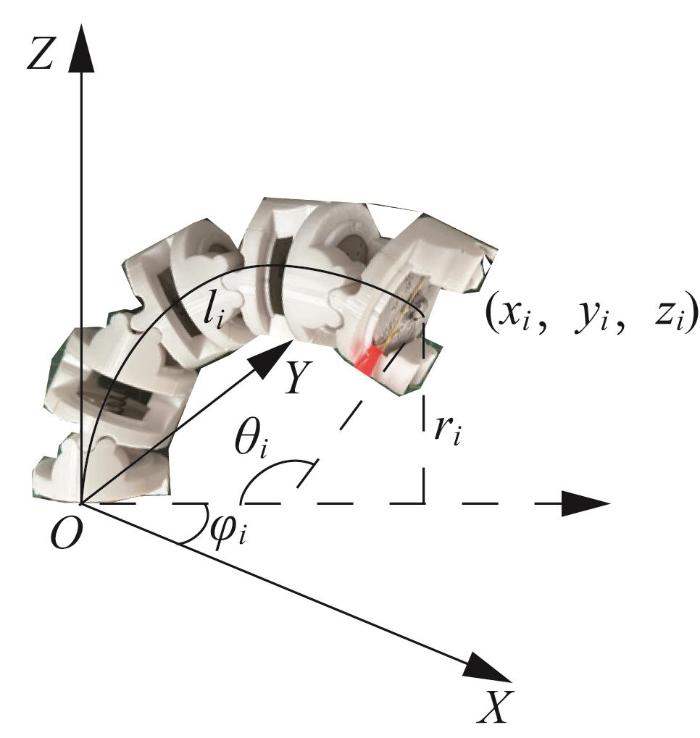
设柔性连续体机械臂有i(i=1, 2, …, n)个模块,将与平台固定的模块设定为第1个,末端模块为第i个。建立机械臂从驱动空间到参数空间再到工作空间的正向运动学模型。机械臂在坐标系中的位姿如图3所示,机械臂底端与坐标系中的XOY平面重合。用参数
图3
其中:
则机械臂末端模块的位置坐标可表示为:
机械臂由4根绳驱动,将驱动绳的长度定义为
则有:
其中:
式中:l0表示驱动绳未拉长/收缩时的长度,
驱动绳的拉长/收缩长度
式中:D表示电机转线轮直径,N表示转动圈数。
联立以上各式,即可得到柔性连续体机械臂在工作空间中的位姿参数。
2.2 动力学模型验证
为验证上文所构建的运动学模型的准确性,便于实现柔性连续体机械臂的精准控制,制作机械臂样机并搭建对应的实验平台,如图4所示。其中,左侧为机械臂样机的控制部分,右侧为机械臂样机的执行部分。该机械臂采用线驱动方式,控制较为简单方便且实现难度低,长线绳可远距离传递驱动力,且执行装置与控制装置分离可减小执行装置的体积与质量。机械臂驱动绳的控制系统由9个减速电机构成,其中8个减速电机用于控制机械臂的弯曲运动,通过控制每个电机的正反转来实现驱动绳的收放。剩余的1个减速电机用于控制机械臂的旋转运动,利用该电机驱动线绳以带动第1个旋转内盘转动,在弹簧传递力的作用下,其他旋转内盘转动,使得机械臂具备柔性特征。使用计算机控制端编写Arduino控制程序后,利用Arduino开发板将控制部分和执行部分相连,以使柔性连续体机械臂可按预想的运动轨迹进行弯曲行走。
图4
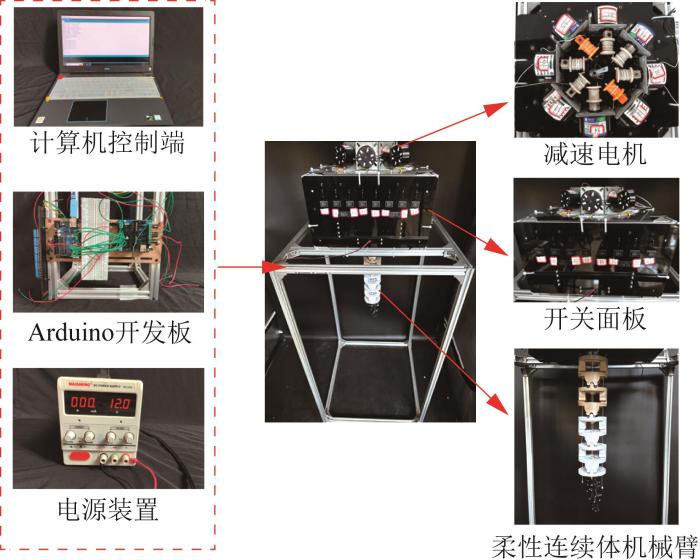
图4
柔性连续体机械臂实验平台
Fig.4
Experimental platform for flexible continuum robotic arm
图5
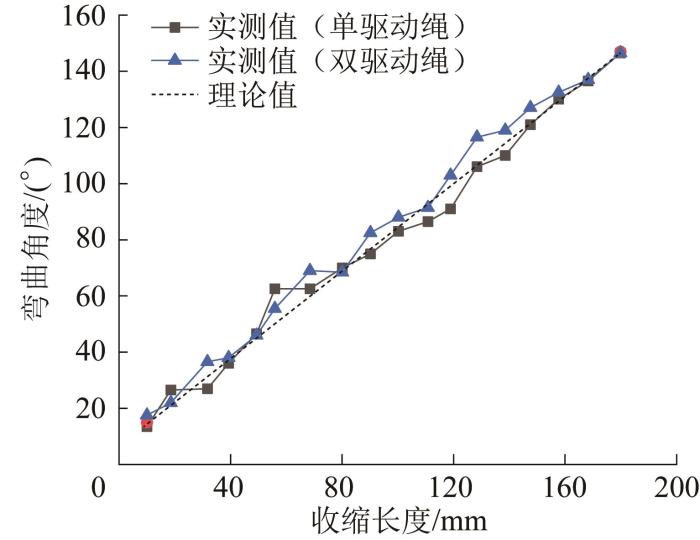
图5
柔性连续体机械臂弯曲角度随驱动绳收缩长度的变化曲线
Fig.5
Variation curves of bending angle of flexible continuum robotic arm with contraction length of driving rope
3 柔性连续体机械臂性能分析
3.1 刚度性能
刚度是指物体在受力时抵抗弹性形变的能力。为了测试所设计的柔性连续体机械臂的刚度性能及其影响因素,搭建图6所示的刚度测量装置。将机械臂一端固定在金属架上,另一端用绳子与固定在步进电机直线导轨上的拉力计连接。在开始测试前,先打开拉力计以实时显示拉力大小,同时开启直线导轨,直至机械臂产生弹性形变。
图6
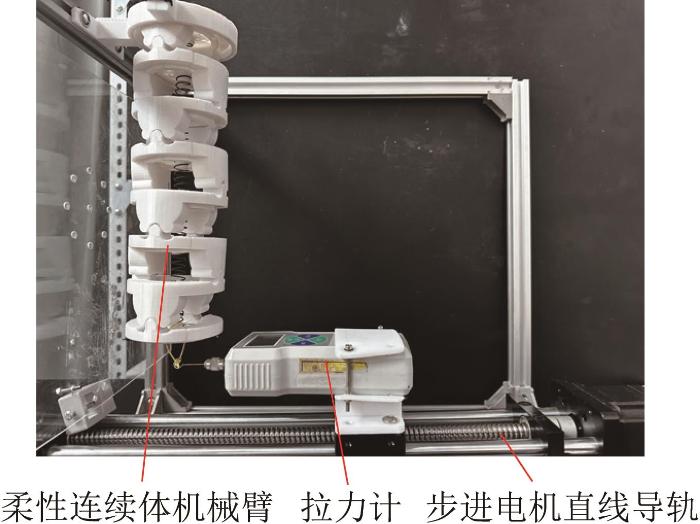
图6
柔性连续体机械臂刚度测量装置
Fig.6
Stiffness measurement device for flexible continuum robotic arm
分别改变柔性连续体机械臂中弹性绳的绷紧程度(拉伸0~120 mm)、弹性绳的粗细(直径为2.5 mm和3.5 mm)以及弹簧的粗细(线径为1.0 mm和1.6 mm,长度均为11 cm),开展刚度测量实验并记录机械臂产生弹性形变时的拉力,结果如图7所示。
图7
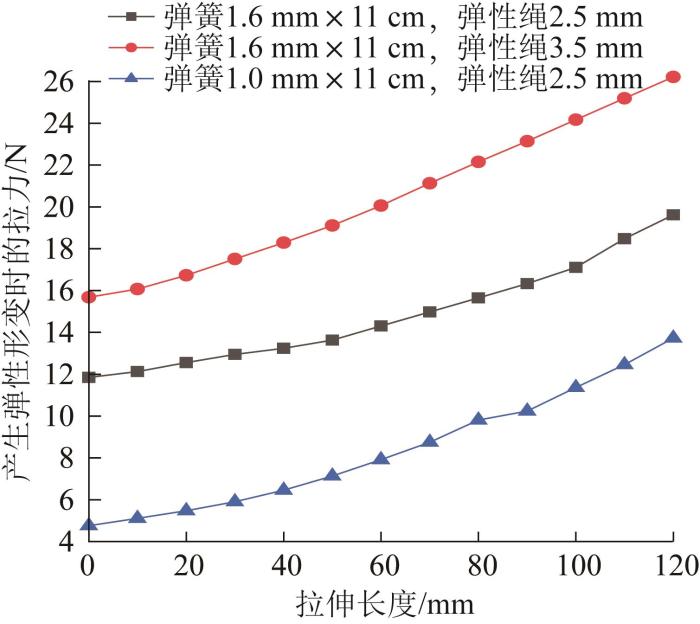
图7
柔性连续体机械臂刚度的变化曲线
Fig.7
Variation curves of stiffness of flexible continuum robotic arm
由图7可知,该柔性连续体机械臂的刚度与弹性绳的拉伸长度、弹性绳的粗细以及弹簧的粗细均呈正相关。
3.2 弯曲性能
最大弯曲角度是影响柔性连续体机械臂性能的重要因素之一,机械臂的最大弯曲角度与其模块数量有关。采用图8所示的装置来测量机械臂模块数量与弯曲角度之间的关系。分别将2个、4个、6个、8个模块弯曲至最大弯曲角度,并使用量角尺测量机械臂整体的弯曲角度。
图8
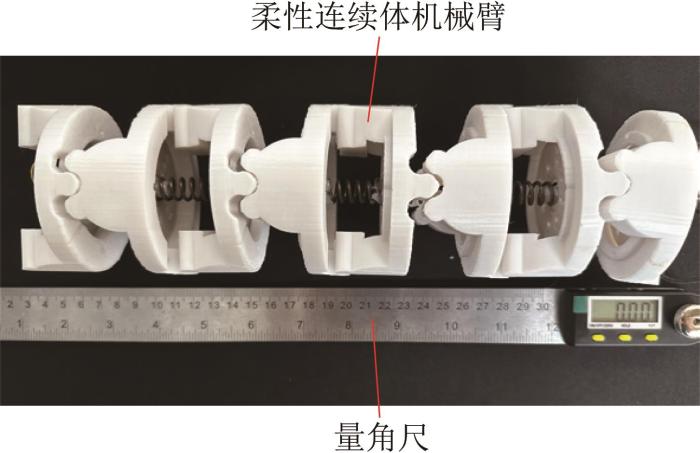
图8
柔性连续体机械臂弯曲角度测量装置
Fig.8
Bending angle measurement device for flexible continuum robotic arm
图9
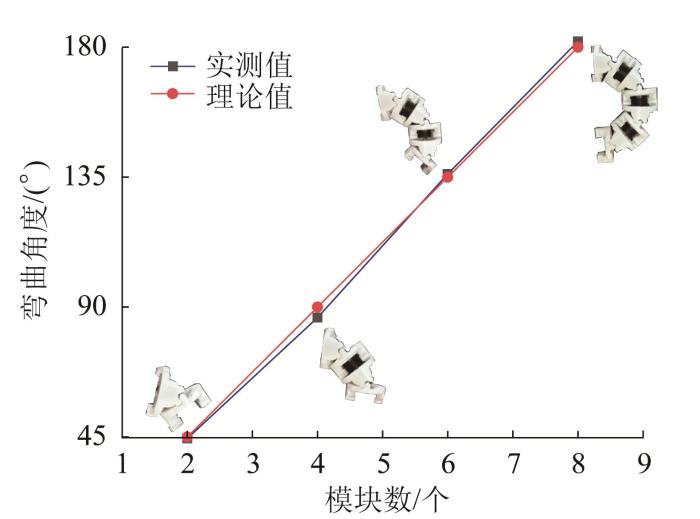
图9
柔性连续体机械臂弯曲角度的变化曲线
Fig.9
Variation curves of bending angle of flexible continuum robotic arm
3.3 旋转性能
旋转内盘与弯曲外盘之间的摩擦力是阻碍内盘转动的最大因素。为测试柔性连续体机械臂的旋转性能,设计图10所示的测试装置。将机械臂固定在金属架上,利用量角尺测量其弯曲角度,并利用连接扭矩扳手的数显扭矩表来测量不同弯曲角度下机械臂实现旋转时所需的扭矩。
图10
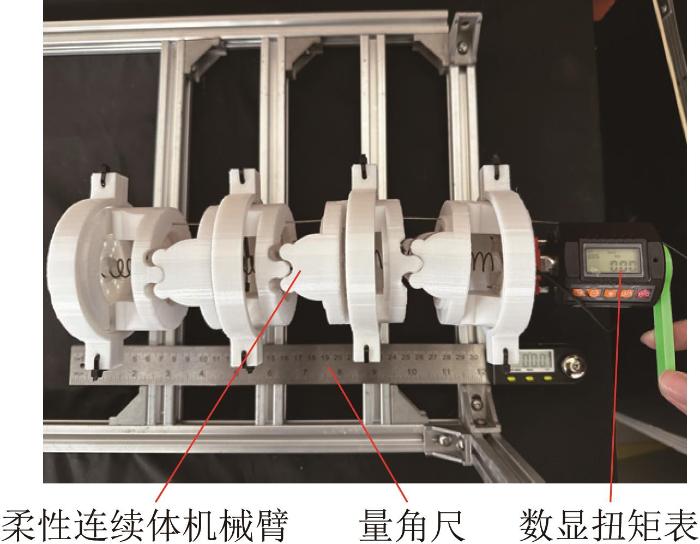
图10
柔性连续体机械臂旋转性能测试装置
Fig.10
Test device for rotating performance of flexible continuum robotic arm
图11
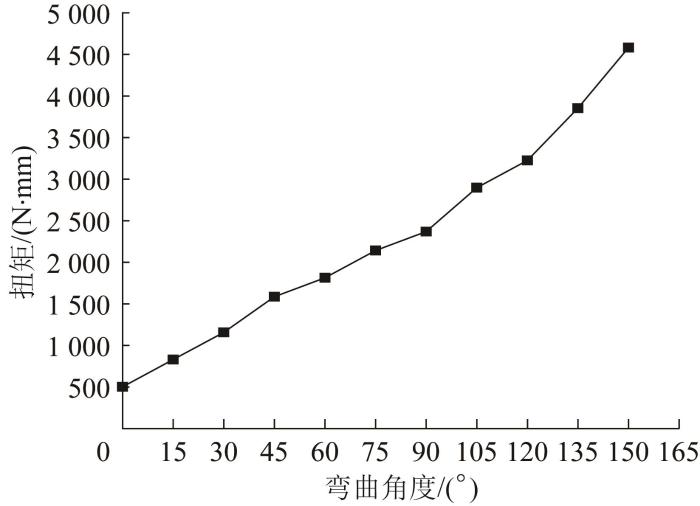
图11
柔性连续体机械臂扭矩随弯曲角度的变化曲线
Fig.11
Torque variation curve of flexible continuum robotic arm with bending angle
4 实验验证
为了验证所设计的柔性连续体机械臂的弯曲与旋转功能互不干涉,即可同时实现弯曲与旋转的组合运动,设计了平面抓取实验和三维抓取实验。
4.1 平面抓取实验
为了使柔性连续体机械臂按预定轨迹进行运动,需在行动轨迹上设置对应的轨迹点。根据机械臂的逆运动学模型,其整体弯曲角度可表示为:
图12
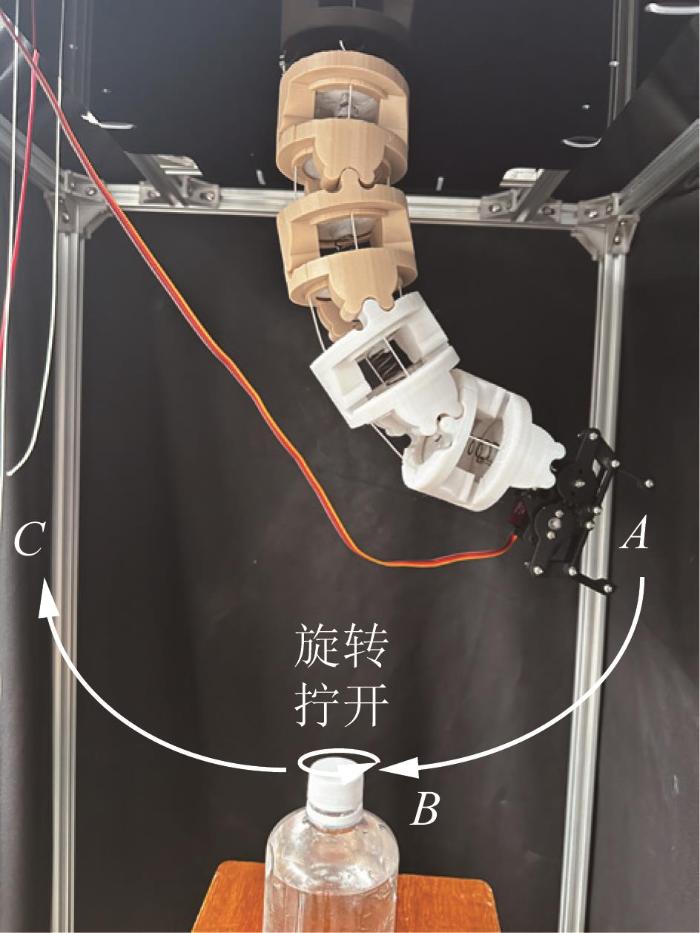
图12
柔性连续体机械臂拧松瓶盖实验方案
Fig.12
Experiment scheme of flexible continuum robotic arm unscrewing bottle cap
表1 柔性连续体机械臂拧松瓶盖实验规划参数
Table 1
轨迹点坐标/ mm | 弯曲角度/(°) | 拉伸/收缩长度/mm | |
|---|---|---|---|
| 左驱动绳 | 右驱动绳 | ||
| (0, 0, -300) | 0 | 0 | 0 |
| (-120, 0, -160) | 71 | -27.5 | 27.5 |
| (100, 0, -175) | 65 | 25.2 | -25.2 |
柔性连续体机械臂拧松瓶盖时的运动过程如图13所示。结果表明,在机械臂移动过程中,其实际轨迹与预定轨迹基本重合,验证了该机械臂具备正常的弯曲与旋转功能,可按预定轨迹进行运动。
图13
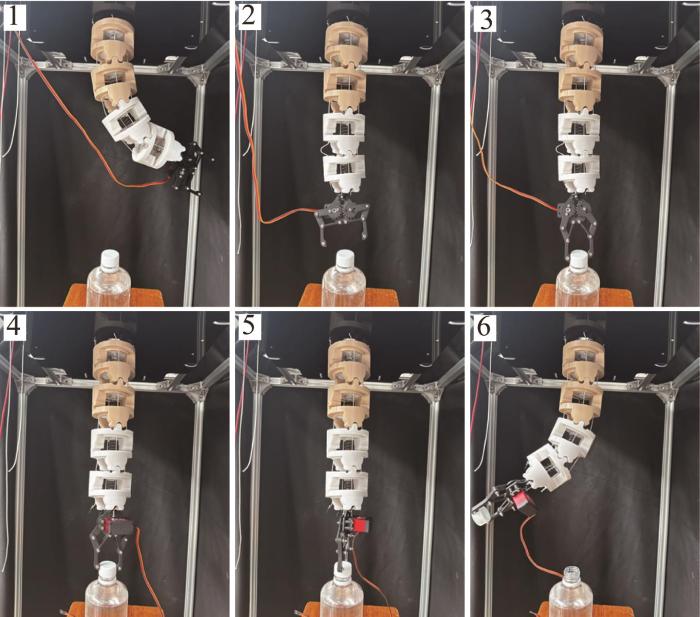
图13
柔性连续体机械臂拧松瓶盖的运动过程
Fig.13
Motion process of flexible continuum robotic arm unscrewing bottle cap
图14
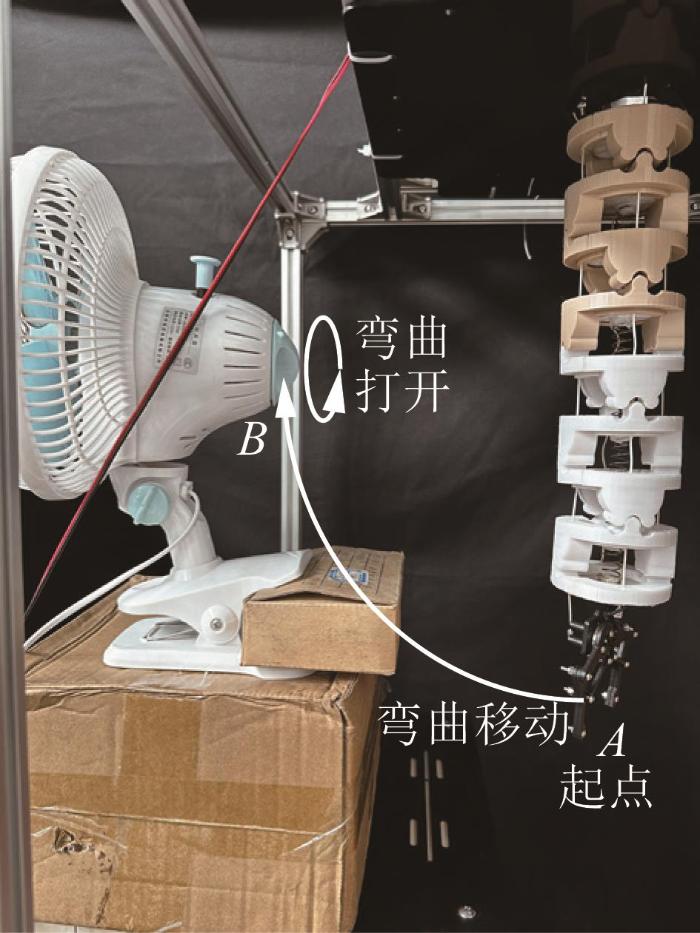
图14
柔性连续体机械臂开启风扇实验方案
Fig.14
Experiment scheme of flexible continuum robotic arm switching on fan
表2 柔性连续体机械臂开启风扇实验规划参数
Table 2
| 轨迹点坐标/mm | 弯曲角度/(°) | 拉伸/收缩长度/mm | |
|---|---|---|---|
| 左驱动绳 | 右驱动绳 | ||
| (0, 0, -300) | 0 | 0 | 0 |
| (142, 0, -125) | 108 | 41.8 | -41.8 |
柔性连续体机械臂开启风扇时的运动过程如图15所示。结果表明,在机械臂移动过程中,其实际轨迹与预定轨迹基本重合,且其在弯曲状态下可实现旋转,不会出现驱动绳相互干扰的问题。
图15
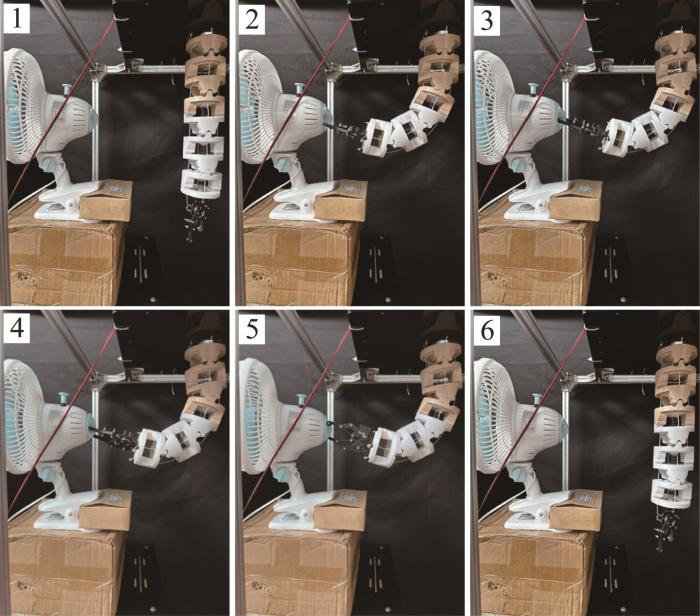
图15
柔性连续体机械臂开启风扇的运动过程
Fig.15
Motion process of flexible continuum robotic arm switching on fan
4.2 三维抓取实验
柔性连续体机械臂通常具有多向弯曲能力。为了验证机械臂的多向弯曲能力,在三维空间内开展避障抓取实验。如图16所示,以机械臂与控制平台固定的中心点为原点,选取5个轨迹点,并在与机械臂同一平面的弯曲轨迹上放置障碍物,令机械臂从起点A(0, 0, -300) mm处出发,绕开点B(64, 0, -160) mm处的障碍物后弯曲至点C(128, 0, -148) mm处;当机械臂到达C点后,抓手夹持C点处物体,途径点D(-64, 135, -148) mm后到达终点E(-128, 0, -148) mm处。同样,根据机械臂的逆运动学模型,求得机械臂在2个平面内运动时驱动绳的理论拉伸/收缩长度,结果如表3所示。
图16
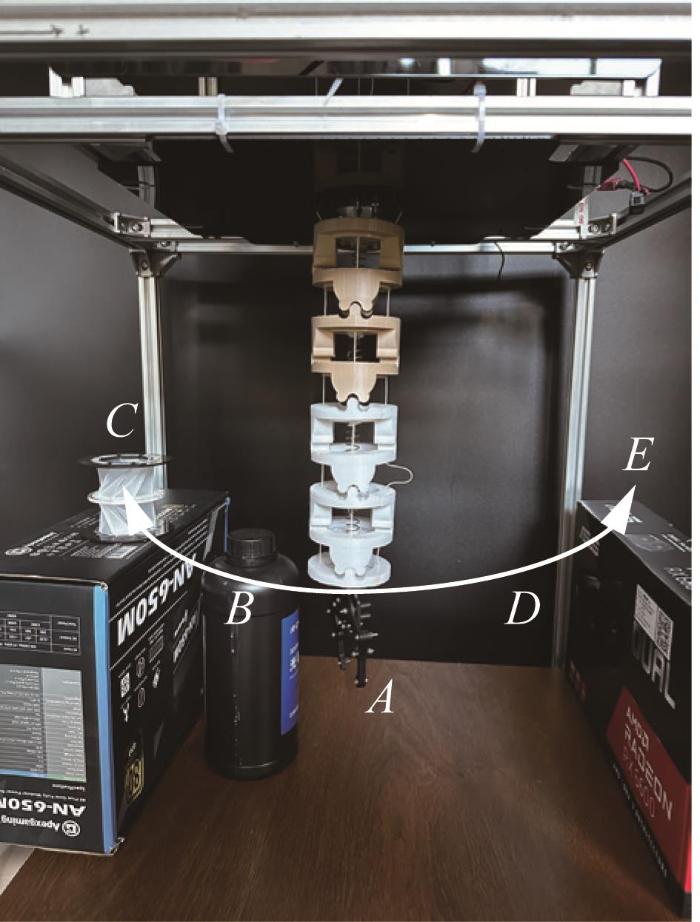
图16
柔性连续体机械臂三维抓取实验方案
Fig.16
Experiment scheme of three-dimensional grasping of flexible continuum robotic arm
表3 柔性连续体机械臂三维抓取实验规划参数
Table 3
| 抓取平面 | 轨迹点坐标/mm | 弯曲角度/(°) | 拉伸/收缩长度/mm | |
|---|---|---|---|---|
| 左驱动绳 | 右驱动绳 | |||
| 前后平面 | (0, 0, -300) | 0 | 0 | 0 |
| (0, 165, -148) | 113 | 43.8 | -43.8 | |
| 左右平面 | (0, 0, -300) | 0 | 0 | 0 |
| (128, 0, -148) | 85 | 32.9 | -32.9 | |
| (-128, 0, -148) | 85 | -32.9 | 32.9 | |
柔性连续体机械臂三维抓取的运动过程如图17所示。由图可知,在机械臂移动过程中,其实际轨迹与预定轨迹基本重合,机械臂通过驱动绳交错排布的方式可实现在圆周方向上的弯曲运动,且不会与旋转运动互相干扰。
图17
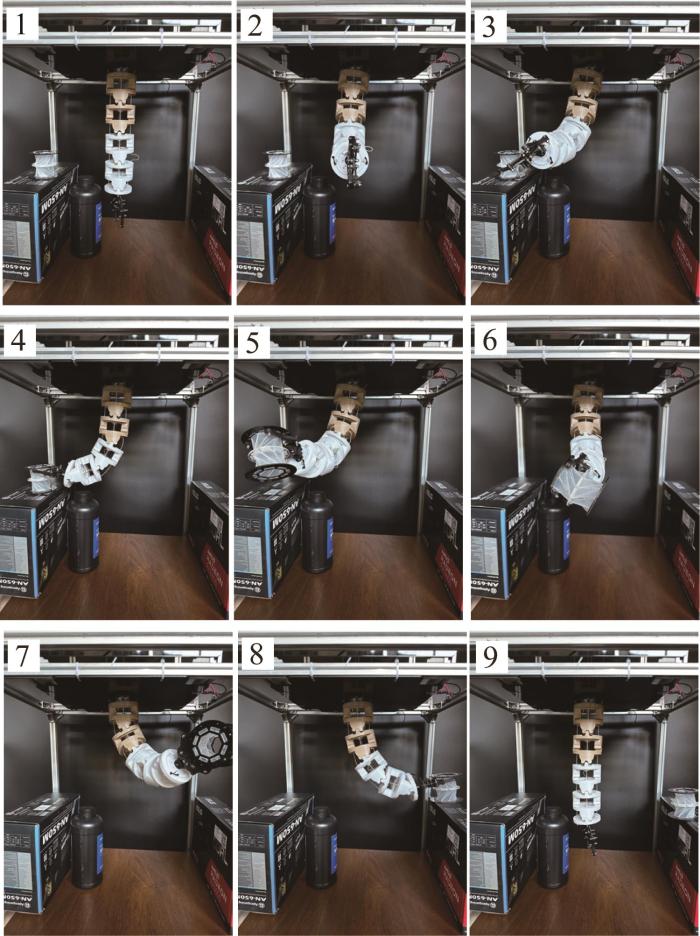
图17
柔性连续体机械臂三维抓取的运动过程
Fig.17
Motion process of three-dimensional grasping of flexible continuum robotic arm
上述实验结果验证了本文所设计的柔性连续体机械臂在二维平面与三维空间内的弯曲与旋转能力,且单模块内的弯曲与旋转运动互不干涉,可完成其余机械臂多个模块才能实现的组合运动。因此,可按照实际路径轨迹,规划柔性连续体机械臂的结构布局,从而实现其在不同场景下的应用。
5 结 论
1)为改善传统线驱动柔性连续体机械臂的缺陷,结合滚动接触这一传动方式的优势,设计了一种基于滚动接触的单模块多自由度柔性连续体机械臂。该机械臂的外部为基于滚动接触的弯曲模块,内部为基于弹簧和旋转结构的旋转模块。将旋转模块放置在弯曲模块内部中空位置,两者互不干涉,不仅解决了现有连续体机械臂弯曲与旋转自由度无法共存的问题,还提高了连续体机械臂的轴向刚度和运动精确性。
2)建立了柔性连续体机械臂的运动学模型,并对其刚度性能、弯曲性能和旋转性能进行了分析。同时,搭建了柔性连续体机械臂样机并开展了二维平面内的拧松瓶盖和开启风扇实验以及三维空间内的避障抓取实验,实验结果验证了机械臂结构设计的可行性。结果表明,所设计的柔性连续体机械臂单模块的弯曲与旋转功能互不干涉,可按实际运动路径规划其驱动绳的拉伸/收缩长度,利用机械臂的多模态运动来实现其在不同场景下的应用。
参考文献
基于重力补偿与滤波模型的工业机械臂打磨技术的研究
[J].
Research on polishing technology of industrial mechanical ARM based on gravity compensation and filter model
[J].DOI:10.3969/j.issn.1001-182X.2021.08.024 [本文引用: 1]
面向机械臂抓取应用的高精度目标6D位姿估计
[D].
High-precision 6D pose estimation for manipulator grasping
[D].
面向单孔腔镜手术的连续型机械臂及其运动建模的研究
[D].
Research on kinematic modeling of a continuum manipulator for signle port access laparoscopy surgery
[D].
面向狭小空间作业的绳驱超冗余机械臂结构设计与研究
[D].
Structure design and research of rope driven hyper-redundant manipulator for narrow space operation
[D].
面向狭小空间作业的超冗余机器人轨迹规划及控制研究
[D].
Research on trajectory planning and control of hyper-redundant robots for confined-space operations
[D].
面向狭小空间作业的绳索驱动超冗余机械臂的研究
[D].
A study on the cable-driven and hyper redundant manipulator for the narrow space operations
[D].DOI:10.18869/acadpub.jafm.68.236.25086 [本文引用: 1]
绳驱超冗余空间柔性机械臂遥操作系统设计与实验研究
[J].
Design and experimental study on the teleoperation system for cable-driven and hyper-redundant space flexible manipulator
[J].DOI:10.13973/j.cnki.robot.210228 [本文引用: 1]
面向空间应用的连续型绳驱柔性机械臂设计
[D].
Design of continuous flexible cable-driven manipulator for outer space application
[D].
面向航天器零部件装配的机械臂混合控制策略
[J].
Hybrid control strategy of manipulator for spacecraft component assembly
[J].
Untethered soft robotics
[J].
Stiffening in soft robotics: a review of the state of the art
[J].
A soft robot that navigates its environment through growth
[J].
Biohybrid robot powered by an antagonistic pair of skeletal muscle tissues
[J].
Design and development of a slender dual-structure continuum robot for in-situ aeroengine repair
[C]//
Tension-based multi-stable compliant rolling-contact elements
[J].
Kinematics and the implementation of an elephant’s trunk manipulator and other continuum style robots
[J].
Design, implementation, and control of a deformable manipulator robot based on a compliant spine
[J].
具有旋转运动的连续体机械臂设计及性能分析
[D].
Design and performance analysis of continuum manipulator with rotating motion
[D].
Continuum robot arms inspired by cephalopods
[C]//
Design and implementation of a multi-section continuum robot: Air-Octor
[C]//
Field trials and testing of the OctArm continuum manipulator
[C]//
Design and development of a soft robotic manipulator
[J].
Design and analysis of hybrid-driven origami continuum robots with extensible and stiffness-tunable sections
[J].
Analysis of elliptical rolling contact joints in compression
[J].
A stiffness-adjustable hyperredundant manipulator using a variable neutral-line mechanism for minimally invasive surgery
[J].
Spatial rolling contact pair generating the specified relative motion between links
[M]//
Design considerations for a hyper-redundant pulleyless rolling joint with elastic fixtures
[J].
基于滚动接触的机器人设计与运动分析
[D].
Design and motion analysis of continuous robot based on rolling contact
[D].
Kinematics for multisection continuum robots
[J].
FRAZELLE C, WALKER I. A comparison of constant curvature forward kinematics for multisection continuum manipulators
[C]//2018 Second IEEE International Conference on Robotic Computing (IRC). Laguna Hills,
Design and kinematic modeling of constant curvature continuum robots: a review
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}