基于滚动接触的单模块多自由度柔性连续体机械臂设计
Design of single-module multi-degree-of-freedom flexible continuum robotic arm based on rolling contact
基于滚动接触的单模块多自由度柔性连续体机械臂设计 |
| 周亮,温涛,胡俊峰,周浩 |
|
Design of single-module multi-degree-of-freedom flexible continuum robotic arm based on rolling contact |
| Liang ZHOU,Tao WEN,Junfeng HU,Hao ZHOU |
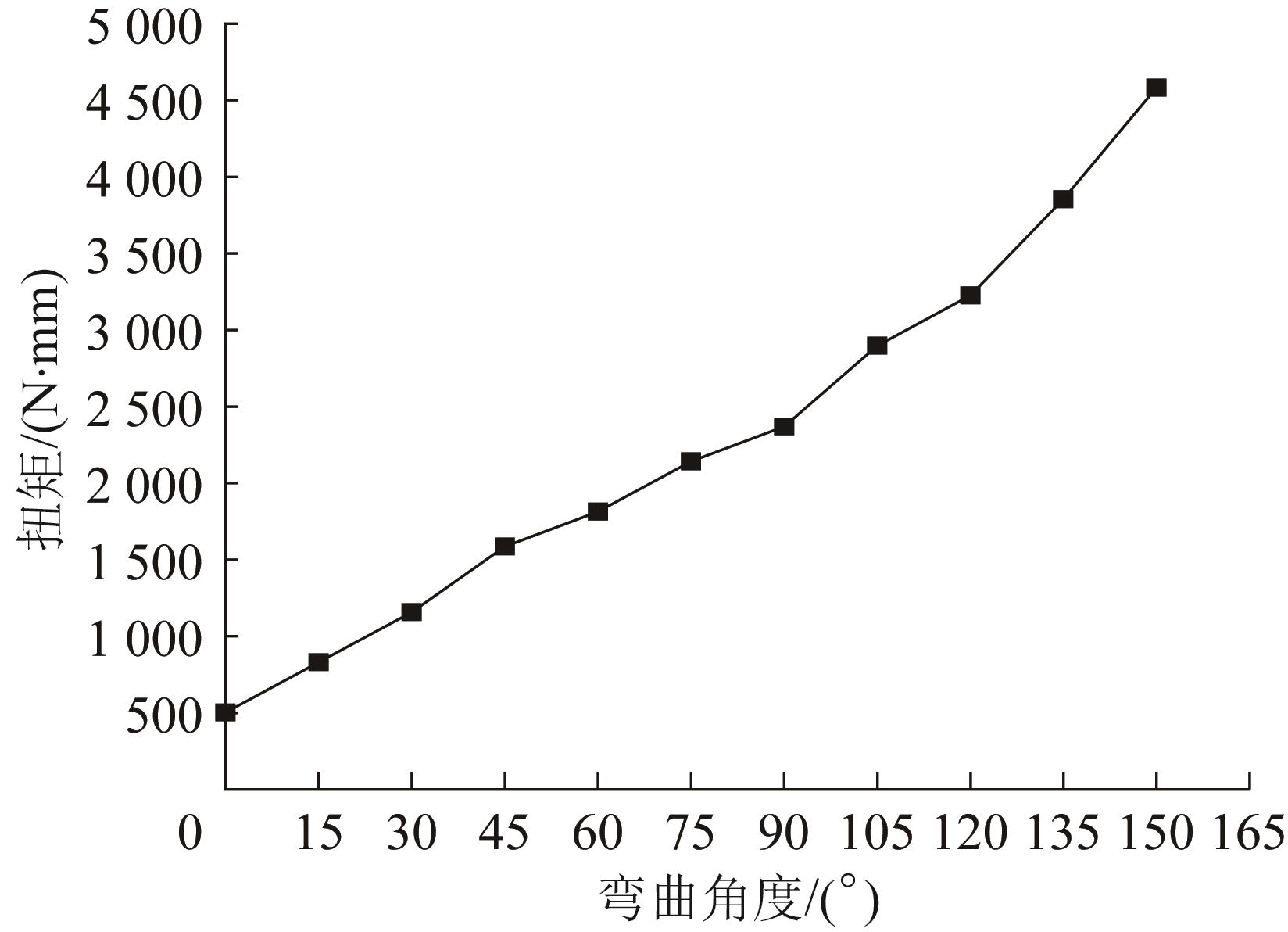
| 图11 柔性连续体机械臂扭矩随弯曲角度的变化曲线 |
| Fig.11 Torque variation curve of flexible continuum robotic arm with bending angle |
|
|