| Robotic and Mechanism Design |
|

|
|
|
| Design and performance analysis of soft robotic fish based on Water Bomb origami structure |
Yu ZHANG( ),Kai CHU,Shen SHU,Jialiang WANG,Hao ZHOU,Junfeng HU() ),Kai CHU,Shen SHU,Jialiang WANG,Hao ZHOU,Junfeng HU() |
| School of Mechanical and Electrical Engineering, Jiangxi University of Science and Technology, Ganzhou 341000, China |
|
|
|
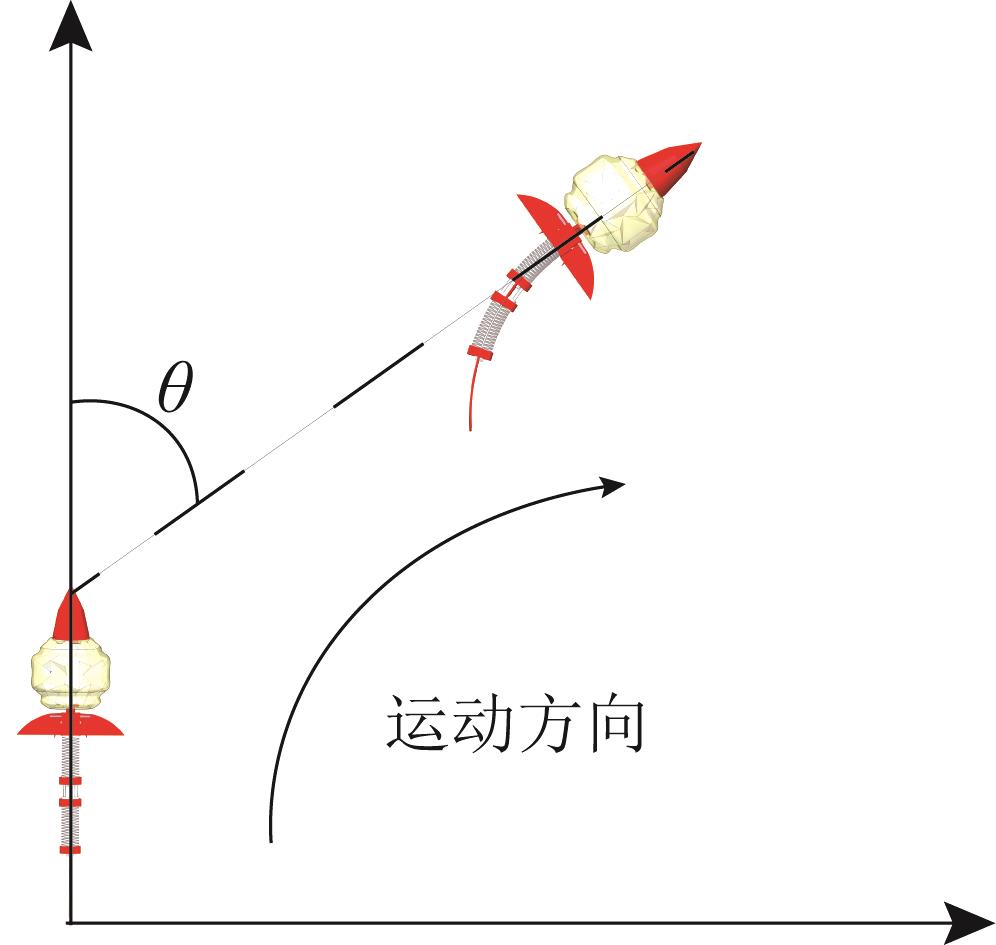
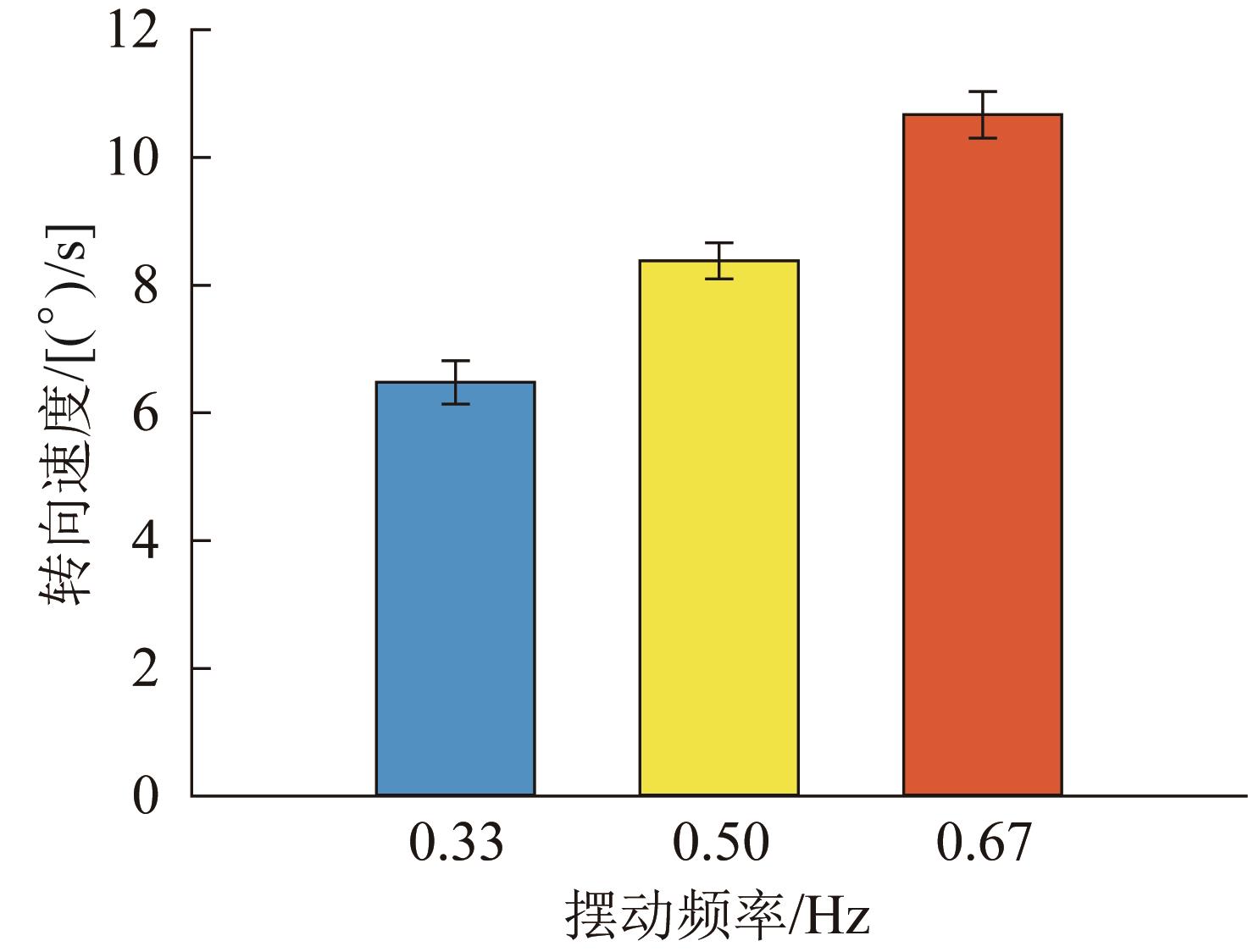
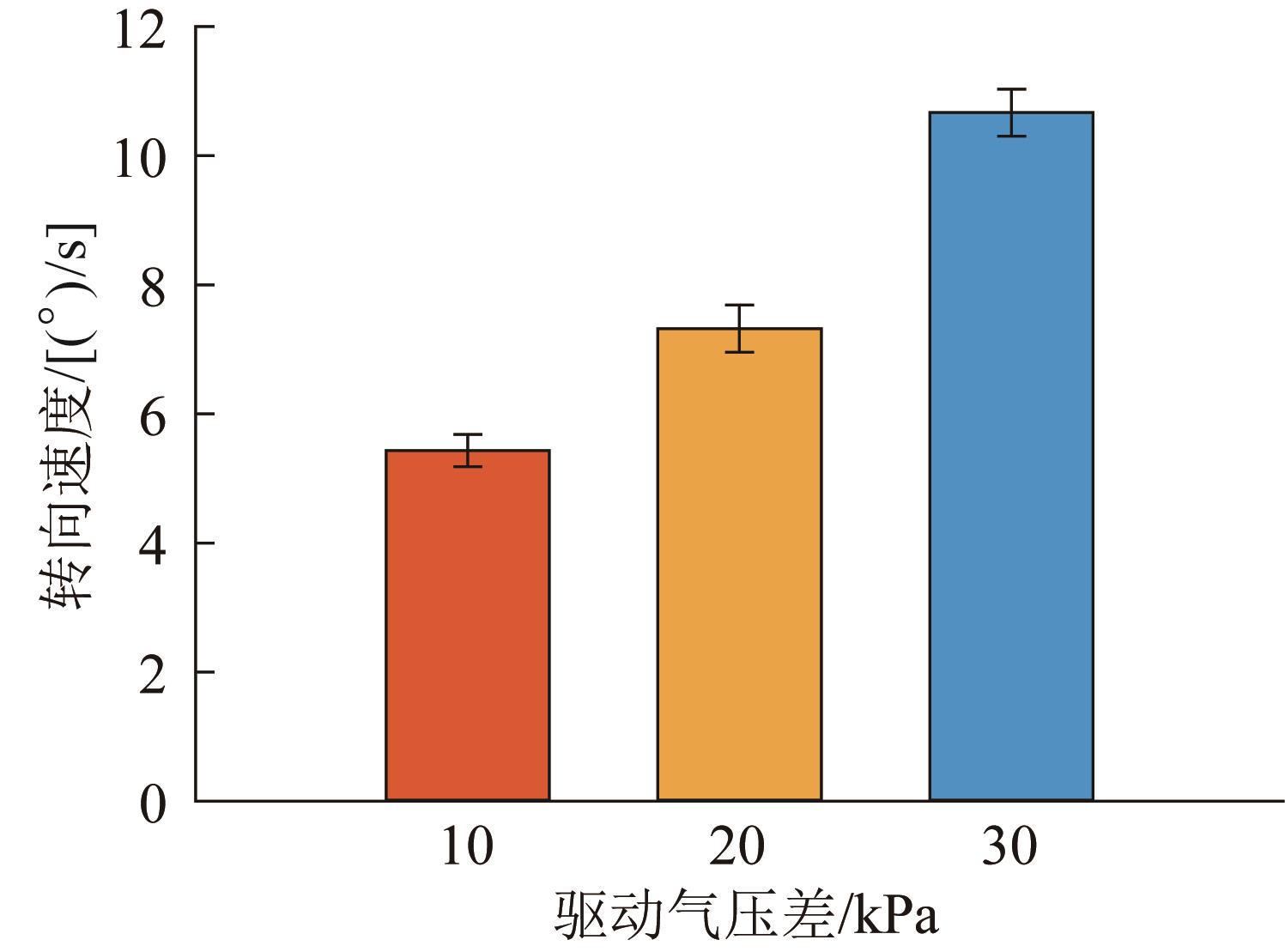
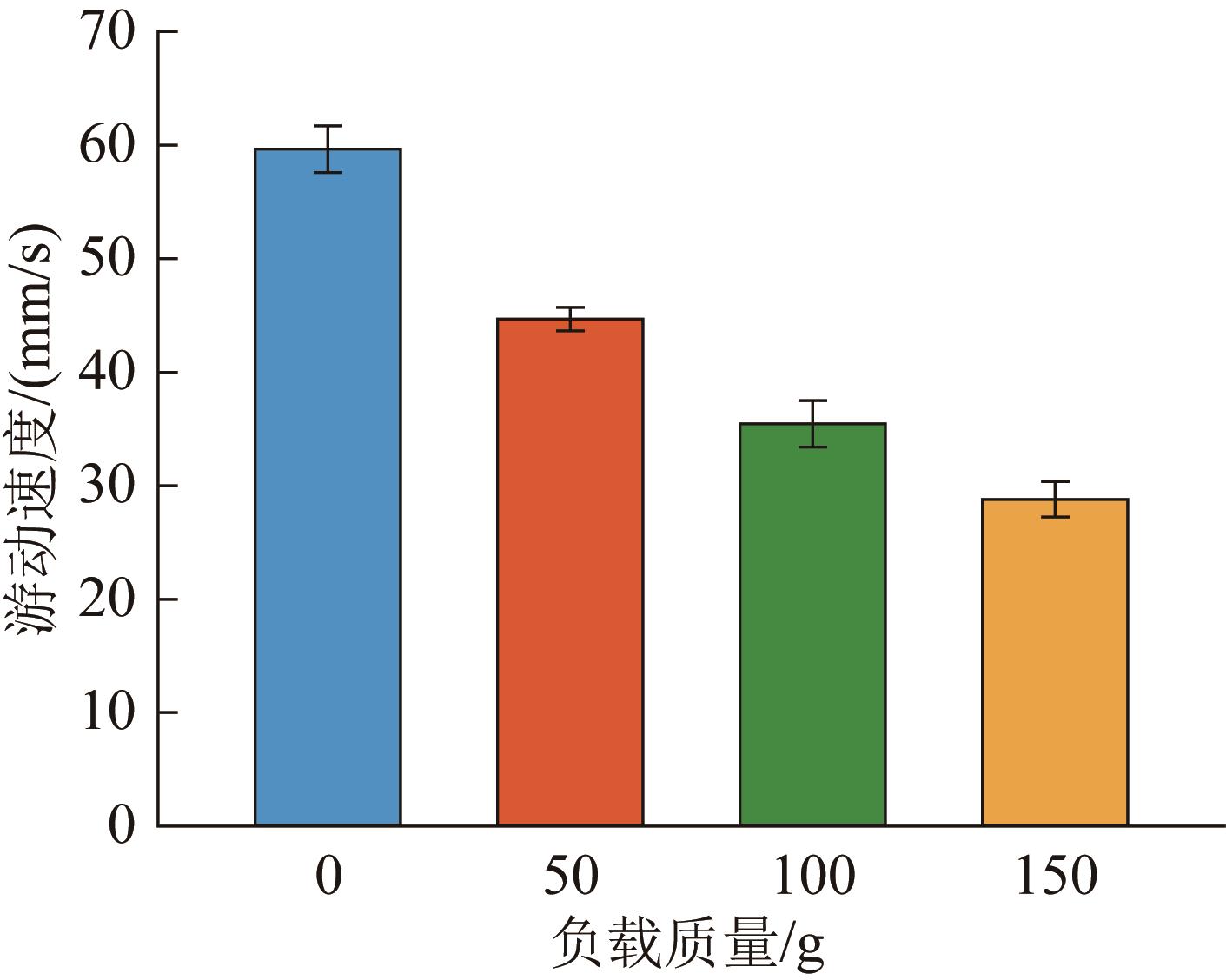
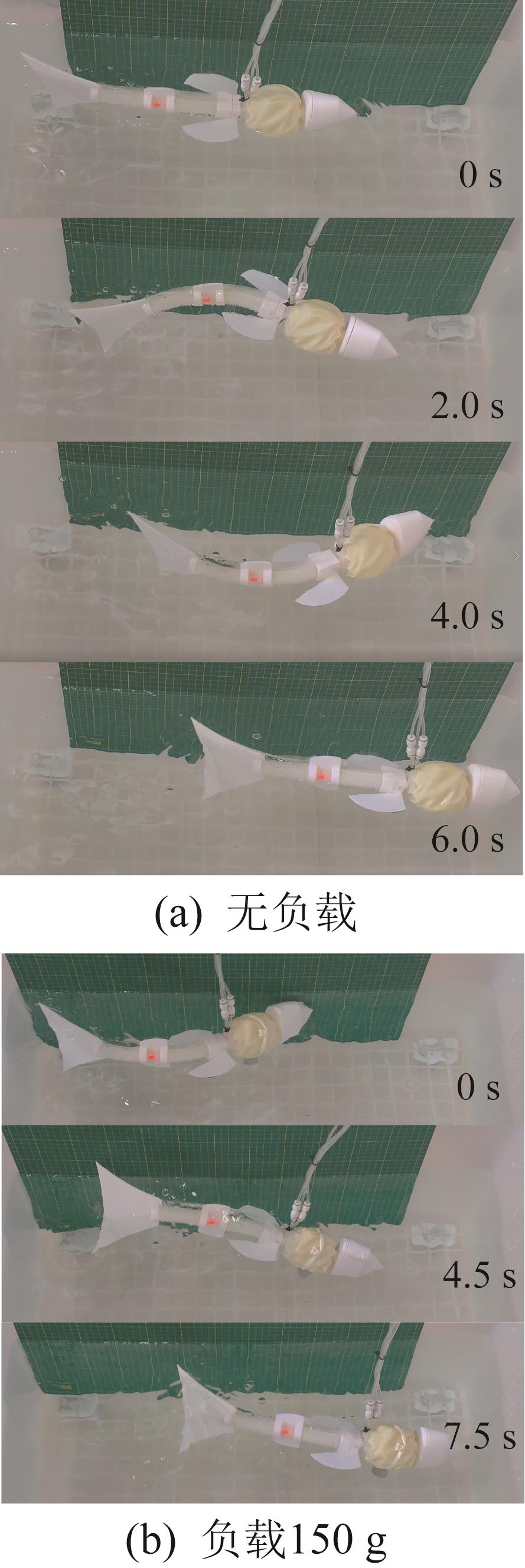
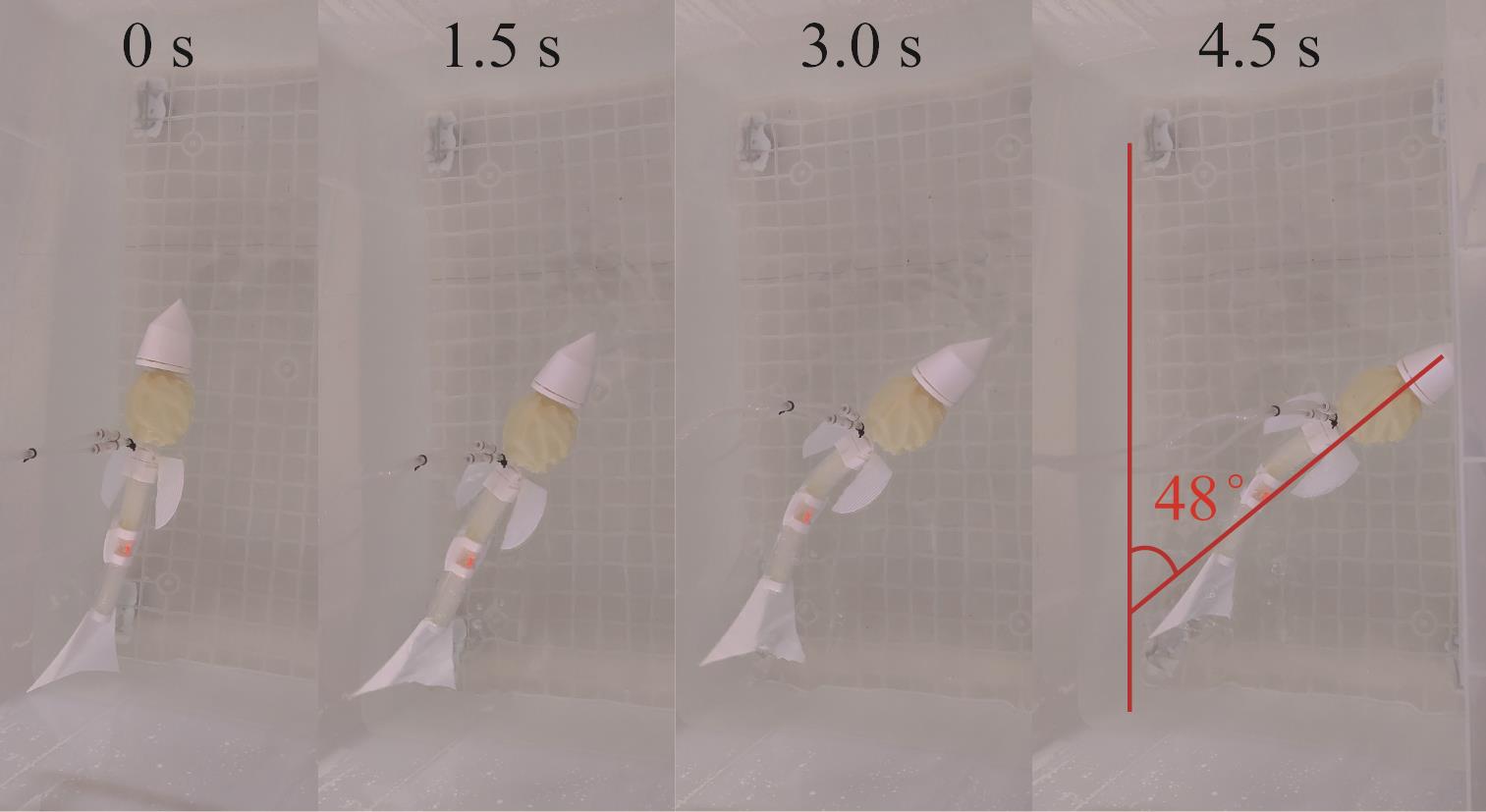
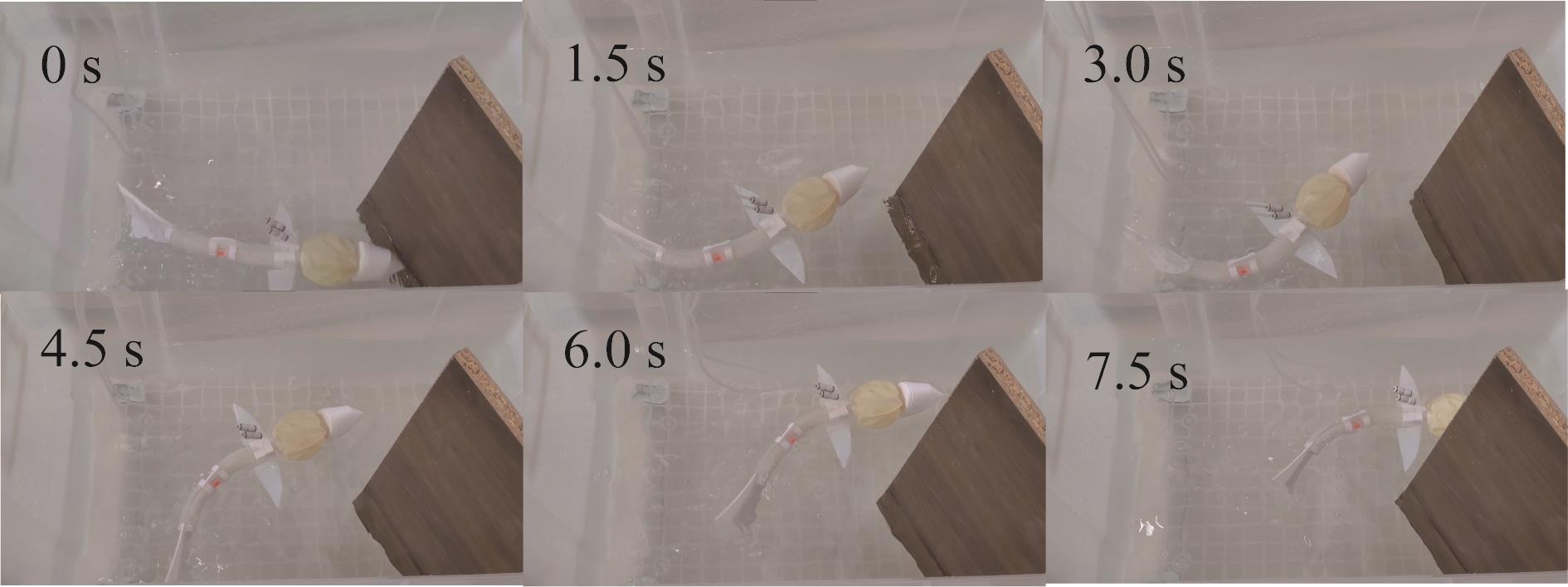
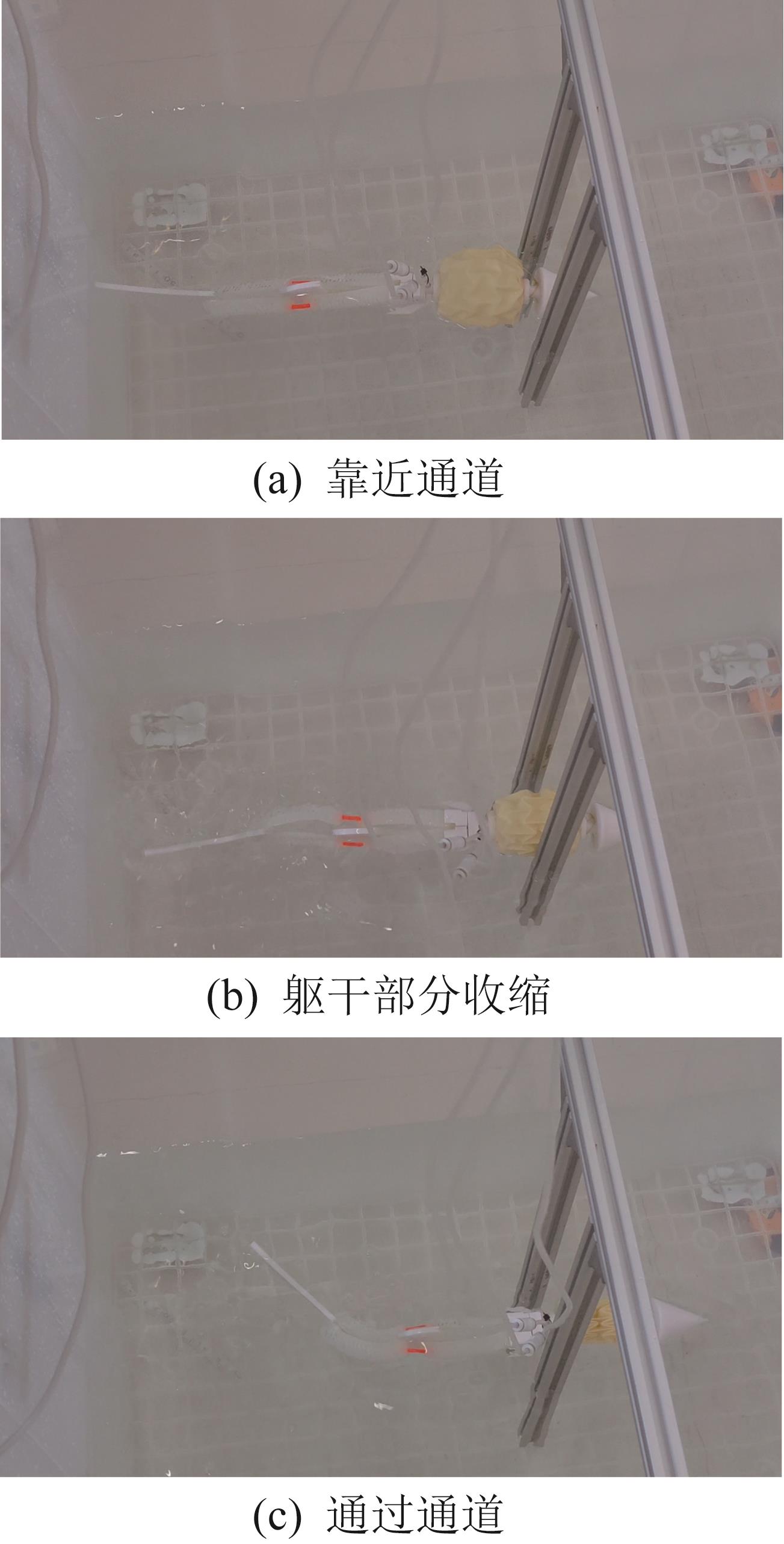
Abstract At present, robotic fish made mainly of rigid materials have good control accuracy and relatively fast swimming speed in water. However, due to the high rigidity of rigid materials, the robotic fish usually cannot adapt well to the narrow passages in water. To solve the above problems, the origami structure was applied to the structural design of robotic fish, and a soft robotic fish that could pass through narrow passages in water and had good swimming performance was designed. This robotic fish was composed of a head, a trunk and a tail. The trunk part adopted the Water Bomb origami structure, and the radial change of the trunk part was achieved by the contraction and expansion of the origami structure. The tail used the bending of the soft origami driver to achieve swing, thereby enabling the forward movement and turning of the robotic fish. The movement of the robotic fish in the water tank was measured through experiments. Its maximum swimming speed was 72.67 mm/s, the fastest turning speed was 10.67 (°)/s, and it could move stably under the condition of a maximum load of 150 g. The results show that the designed robotic fish can not only move flexibly in water, but also utilize the folding characteristics of the trunk part to pass through some narrow passages and obstacles, which provides a new idea for the design and research of soft robotic fish.
|
|
Received: 30 April 2024
Published: 02 July 2025
|
|
|
|
Corresponding Authors:
Junfeng HU
E-mail: 1587402060@qq.com;hjfsuper@126.com
|
基于Water Bomb折纸结构的软体机器鱼设计与性能分析
目前,以刚性材料为主体制作的机器鱼在水中具有良好的控制精度和较快的游动速度,但由于刚性材料自身的刚度较高,机器鱼通常无法很好地适应水中的狭窄通道。为了解决上述问题,将折纸结构应用于机器鱼的结构设计,设计了一种可在水中通过狭窄通道且具有良好游动性能的软体机器鱼。该机器鱼由头部、躯干和尾部组成,其中:躯干部分采用Water Bomb折纸结构,利用折纸结构的收缩和膨胀来实现躯干部分的径向变化;尾部利用软体折纸驱动器的弯曲来实现摆动,从而实现机器鱼的前行和转弯。通过实验测得了机器鱼在水箱中的运动情况,其最高游动速度为72.67 mm/s,最快转向速度为10.67 (°)/s,且能在最大负载为150 g的条件下稳定运动。结果表明,所设计的机器鱼不仅可以在水中灵活运动,而且能够利用躯干部分的折叠特性通过部分狭窄通道和障碍。这为软体机器鱼的设计与研究提供了一种新思路。
关键词:
软体机器鱼,
软体折纸驱动器,
Water Bomb折纸结构,
折叠特性
|
|
| [[1]] |
COLGATE J E, LYNCH K M. Mechanics and control of swimming: a review[J]. IEEE Journal of Oceanic Engineering, 2004, 29(3): 660-673.
|
|
|
| [[2]] |
迟冬祥, 颜国正. 仿生机器人的研究状况及其未来发展[J]. 机器人, 2001, 23(5): 476-480. doi:10.3321/j.issn:1002-0446.2001.05.021
CHI D X, YAN G Z. Biomimetic robot research and its perspective[J]. Robot, 2001, 23(5): 476-480.
doi: 10.3321/j.issn:1002-0446.2001.05.021
|
|
|
| [[3]] |
RYUH Y S, YANG G H, LIU J D, et al. A school of robotic fish for mariculture monitoring in the sea coast[J]. Journal of Bionic Engineering, 2015, 12(1): 37-46.
|
|
|
| [[4]] |
SAHOO S, DONG X H, LIU Z Q, et al. Under water waste cleaning by mobile edge computing and intelligent image processing based robotic fish[EB/OL]. (2020-08-31) [2024-04-10]. .
|
|
|
| [[5]] |
成巍. 仿生水下机器人仿真与控制技术研究[D]. 哈尔滨: 哈尔滨工程大学, 2004: 21-32.
CHENG W. Research on simulation and control technology of bionic underwater robot[D]. Harbin: Harbin Engineering University, 2004: 21-32.
|
|
|
| [[6]] |
XIA Q C, LI H, SONG N, et al. Research on flexible collapsible fluid-driven bionic robotic fish[J]. Ocean Engineering, 2023, 276: 114203.
|
|
|
| [[7]] |
ZHONG Y, LI Z, DU R X. A novel robot fish with wire-driven active body and compliant tail[J]. IEEE/ASME Transactions on Mechatronics, 2017, 22(4): 1633-1643.
|
|
|
| [[8]] |
ZHONG Y, SONG J L, YU H Y, et al. Toward a transform method from Lighthill fish swimming model to biomimetic robot fish[J]. IEEE Robotics and Automation Letters, 2018, 3(3): 2632-2639.
|
|
|
| [[9]] |
MARCHESE A D, ONAL C D, RUS D. Autonomous soft robotic fish capable of escape maneuvers using fluidic elastomer actuators[J]. Soft Robotics, 2014, 1(1): 75-87.
|
|
|
| [[10]] |
KATZSCHMANN R K, MARCHESE A D, RUS D. Hydraulic autonomous soft robotic fish for 3D swimming[M]//Experimental Robotics. Cham: Springer International Publishing, 2015: 405-420.
|
|
|
| [[11]] |
KATZSCHMANN R K, DELPRETO J, MACCURDY R, et al. Exploration of underwater life with an acoustically controlled soft robotic fish[J]. Science Robotics, 2018, 3(16): eaar3449.
|
|
|
| [[12]] |
ZHU J, WHITE C, WAINWRIGHT D K, et al. Tuna robotics: a high-frequency experimental platform exploring the performance space of swimming fishes[J]. Science Robotics, 2019, 4(34): eaax4615.
|
|
|
| [[13]] |
WANG Z, WANG L Y, WANG T, et al. Research and experiments on electromagnetic-driven multi-joint bionic fish[J]. Robotica, 2022, 40(3): 720-746.
|
|
|
| [[14]] |
YANG W G, GUO Q H, TENG X Y, et al. A ray-inspired flexible robot fish with stable controllability actuated by photo-responsive composite hydrogels with poly(N-isopropylacrylamide) and multi-walled carbon nanotubes[J]. Sensors and Actuators A: Physical, 2024, 373: 115437.
|
|
|
| [[15]] |
CHEN D, WANG B, XIONG Y, et al. Design and analysis of a novel bionic tensegrity robotic fish with a continuum body[J]. Biomimetics (Basel), 2024, 9(1): 19.
|
|
|
| [[16]] |
WANG R Q, ZHANG C, ZHANG Y W, et al. Fast-swimming soft robotic fish actuated by bionic muscle[J]. Soft Robotics, 2024, 11(5): 845-856.
|
|
|
| [[17]] |
NGUYEN D Q, HO V A. Anguilliform swimming performance of an eel-inspired soft robot[J]. Soft Robotics, 2022, 9(3): 425-439.
|
|
|
| [[18]] |
ONAL C D, WOOD R J, RUS D. Towards printable robotics: origami-inspired planar fabrication of three-dimensional mechanisms[C]//2011 IEEE International Conference on Robotics and Automation. Shanghai, May 9-13, 2011.
|
|
|
| [[19]] |
VANDER HOFF E, JEONG D H, LEE K J. OrigamiBot-I: a thread-actuated origami robot for manipulation and locomotion[C]//2014 IEEE/RSJ International Conference on Intelligent Robots and Systems. Chicago, IL, Sep. 14-18, 2014.
|
|
|
| [[20]] |
SFAKIOTAKIS M, LANE D M, DAVIES J B C. Review of fish swimming modes for aquatic locomotion[J]. IEEE Journal of Oceanic Engineering, 1999, 24(2): 237-252.
|
|
|
| [[21]] |
曹庆明. 鱼类胸鳍推进的水动力分析与运动仿真建模[D]. 哈尔滨: 哈尔滨工程大学, 2006.
CAO Q M. Hydrodynamic characteristics and motion simulation model construction of a pectoral-fin propeller[D]. Harbin: Harbin Engineering University, 2006.
|
|
|
| [[22]] |
苏玉民, 黄胜, 庞永杰, 等. 仿鱼尾潜器推进系统的水动力分析[J]. 海洋工程, 2002, 20(2): 54-59.
SU Y M, HUANG S, PANG Y J, et al. Hydrodynamic analysis of submersible propulsion system imitating tuna-tail[J]. The Ocean Engineering, 2002, 20(2): 54-59.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|