| Optimization Design |
|


|
|
|
| Design and performance analysis of fast crawling soft pipeline robot |
Lei LIU( ),Tao WEN,Weitao HAN,Xuanming HU,Junfeng HU() ),Tao WEN,Weitao HAN,Xuanming HU,Junfeng HU() |
| College of Mechanical and Electrical Engineering, Jiangxi University of Science and Technology, Ganzhou 341000, China |
|
|
|
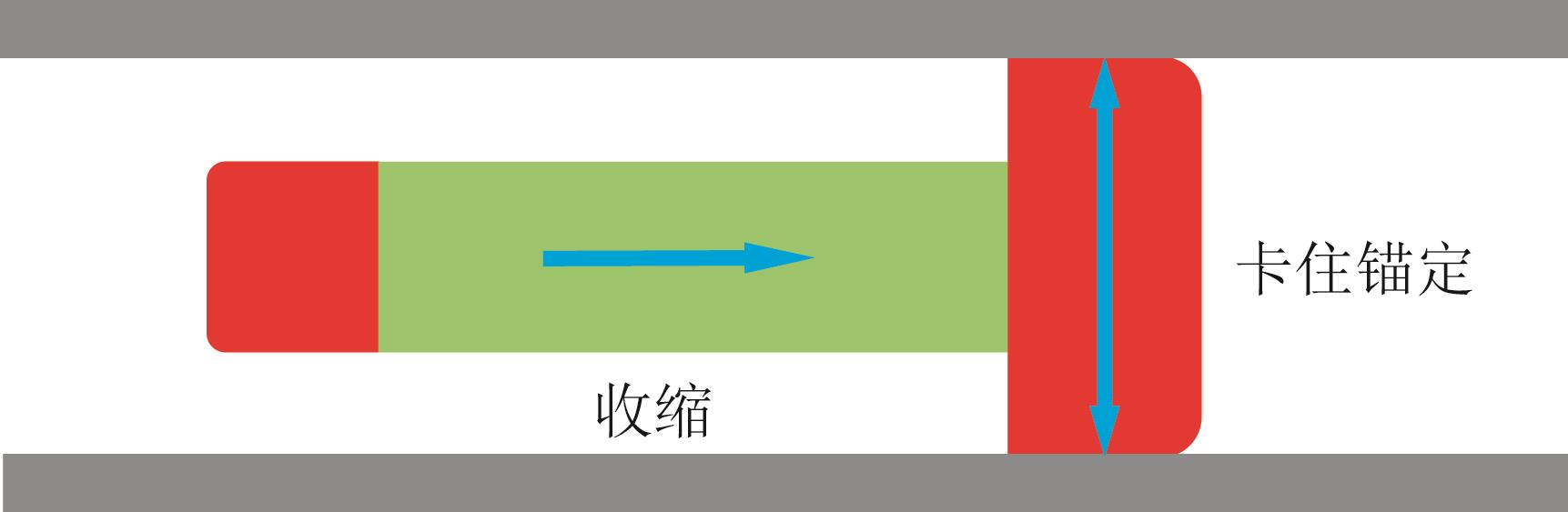
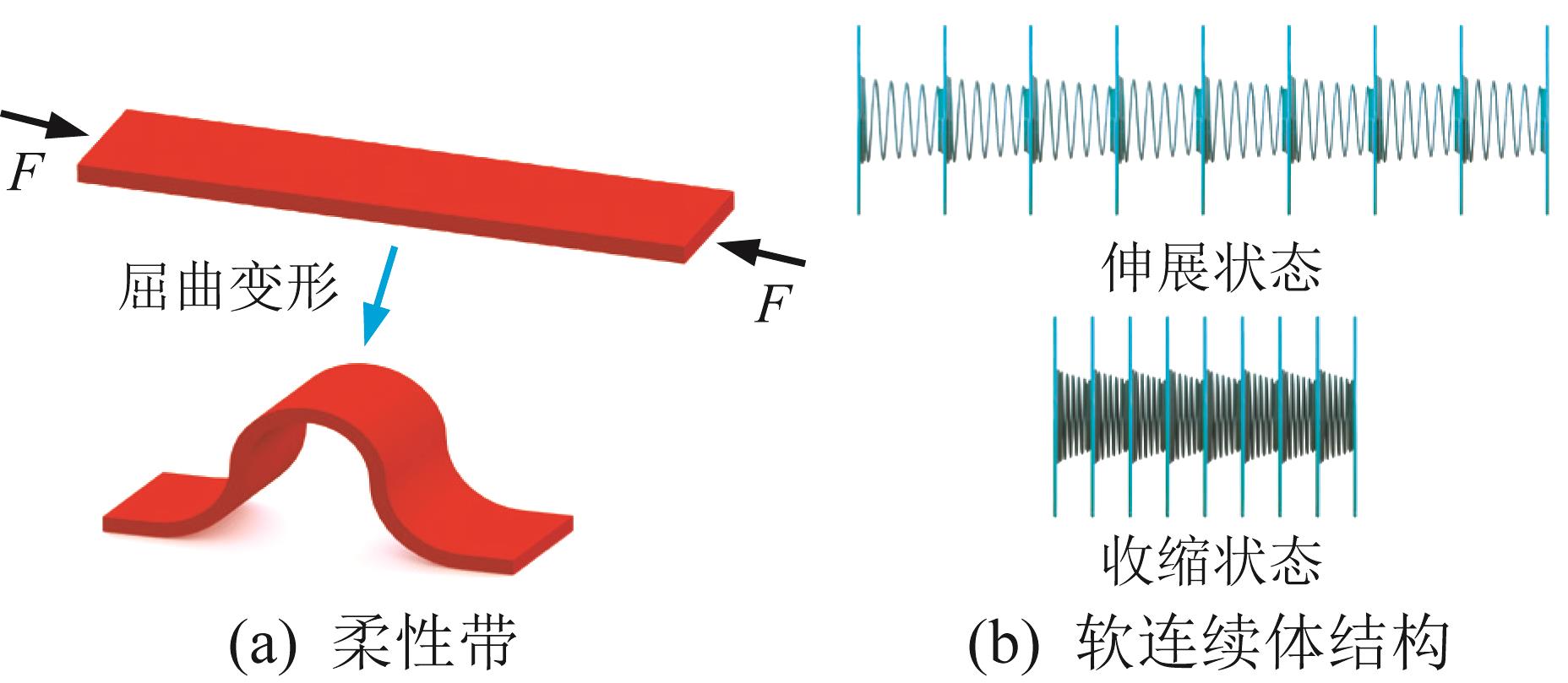
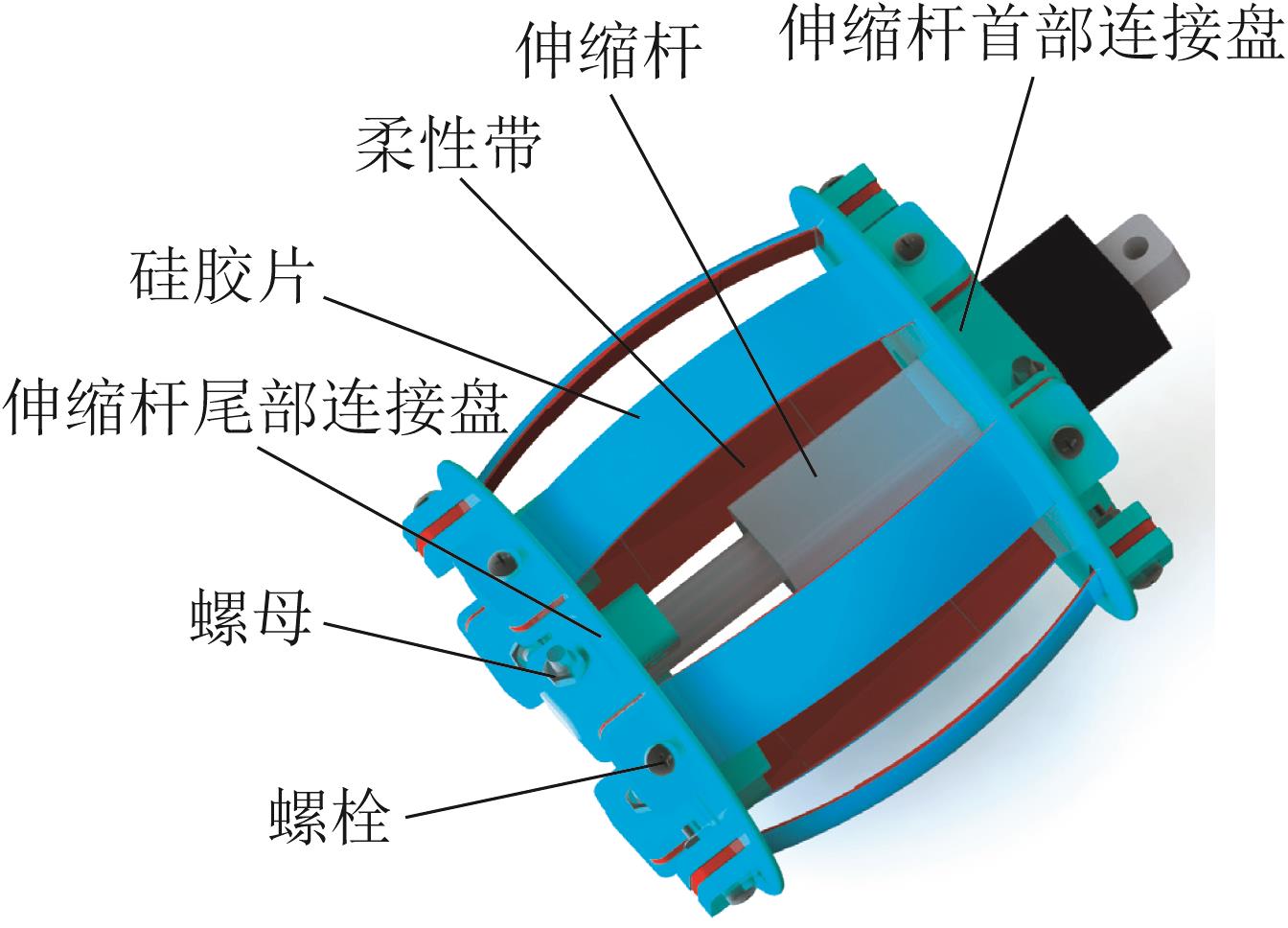
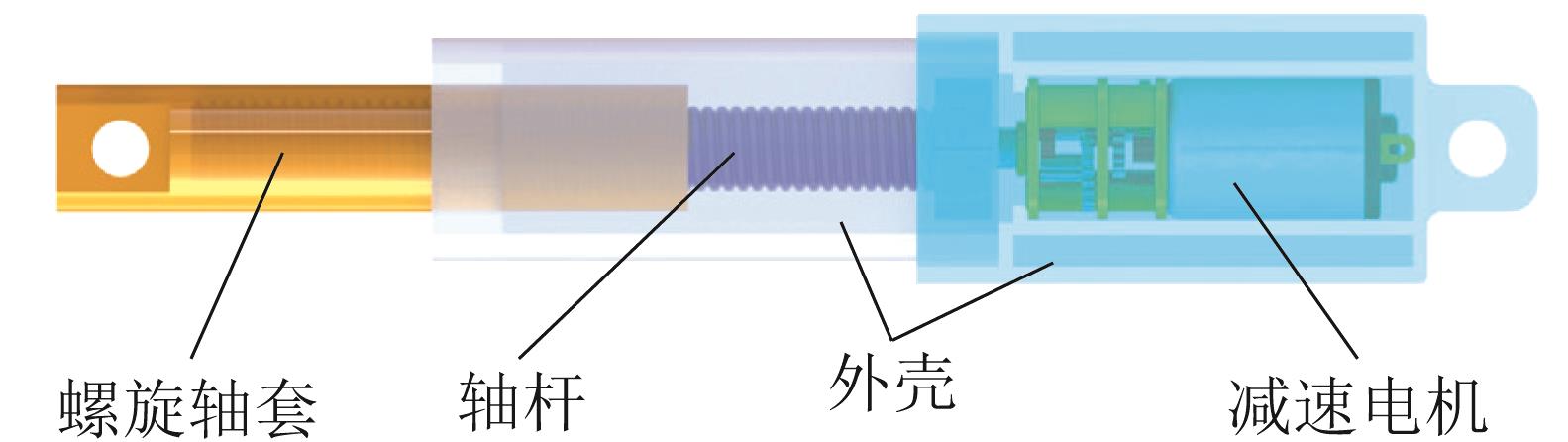
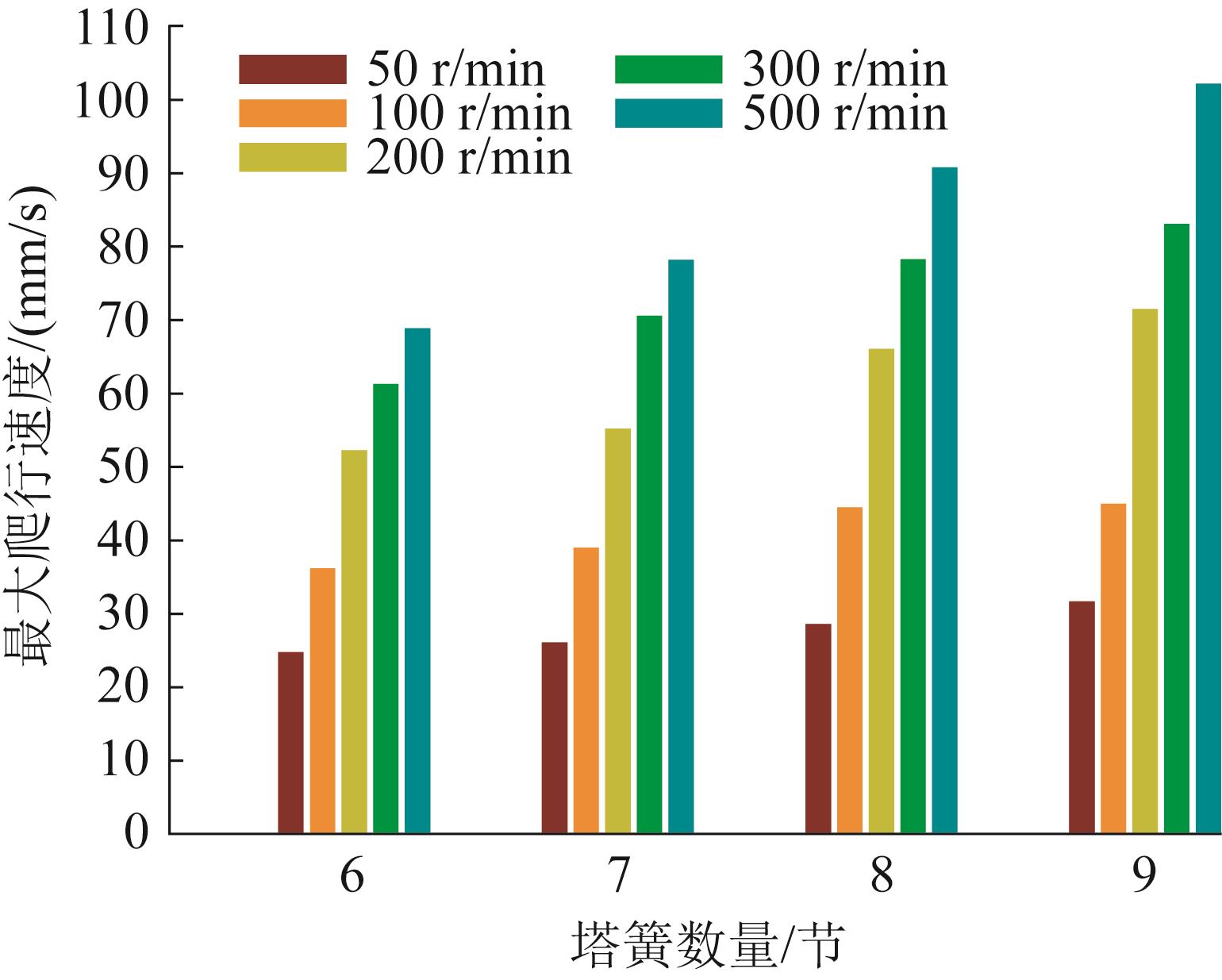
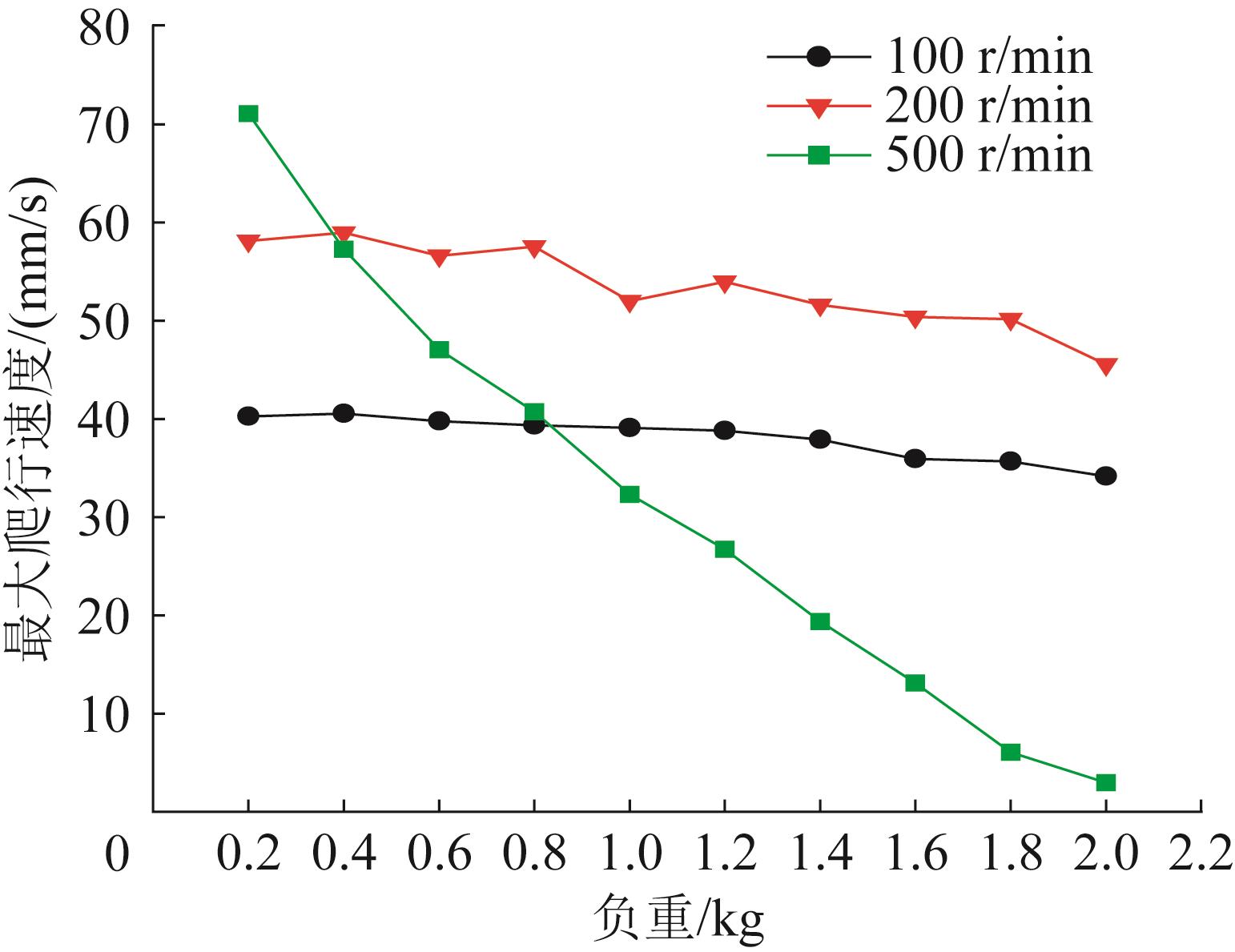
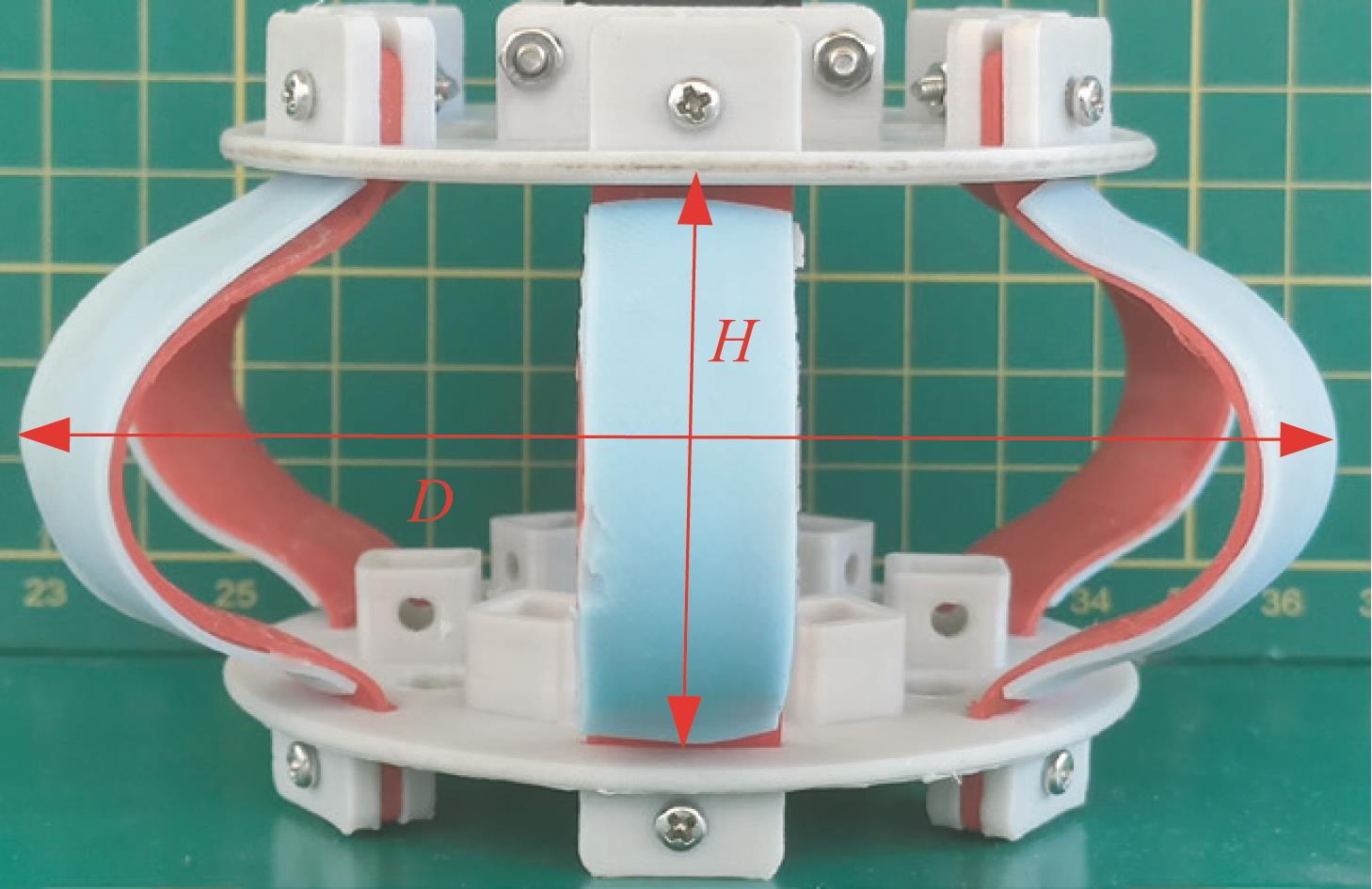
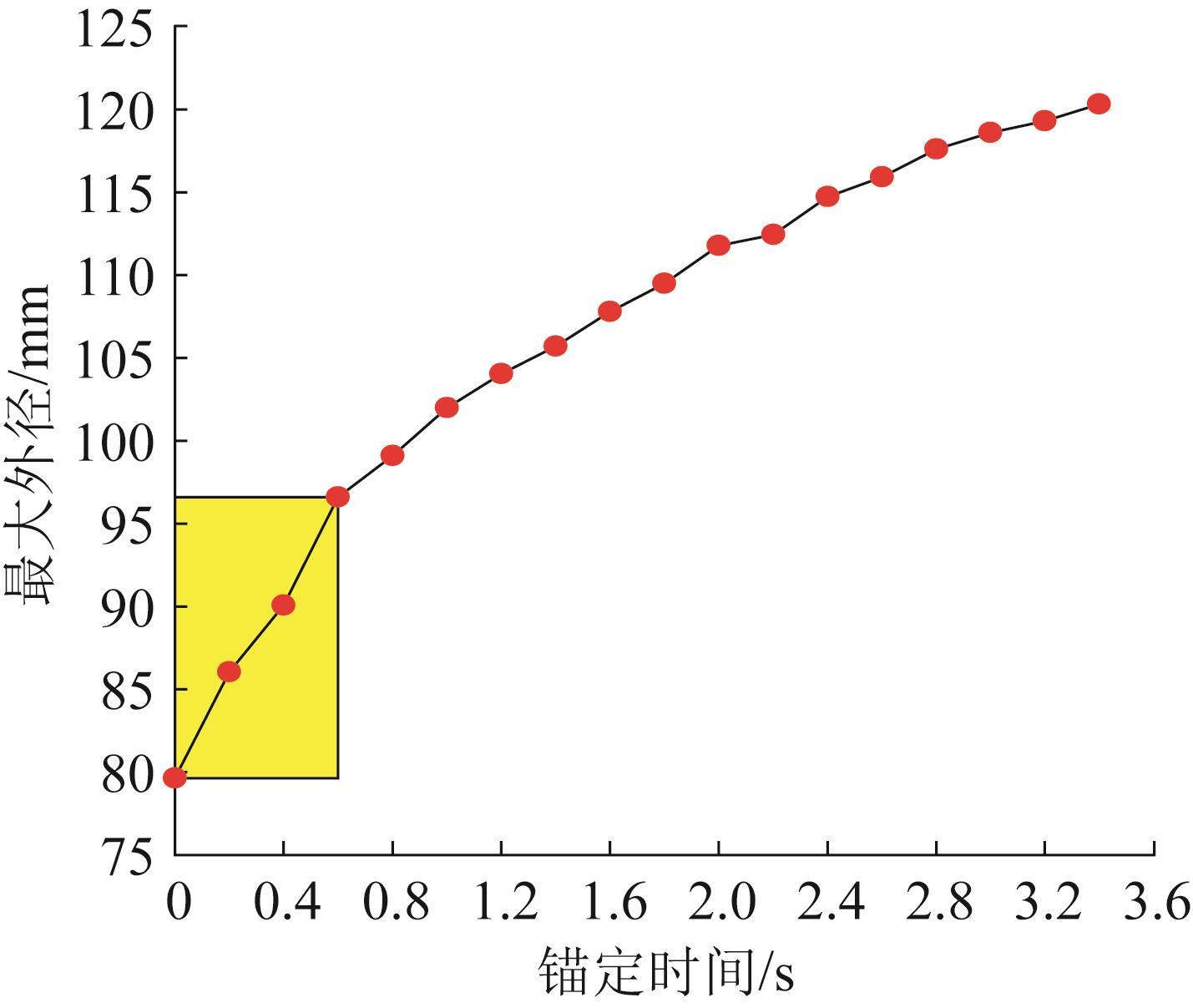
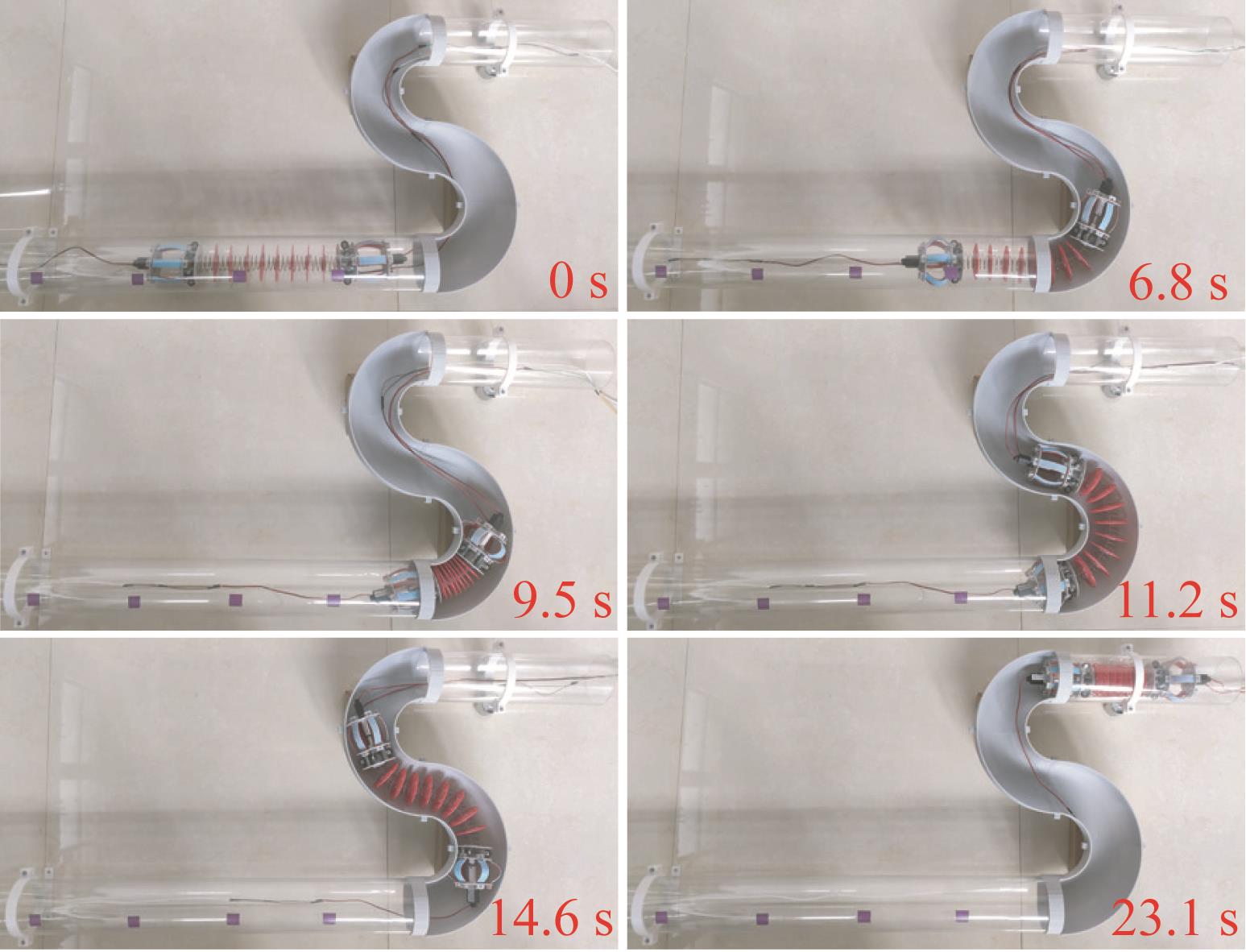
Abstract Soft pipeline robots with anchoring-telescoping motion mechanism are typically constructed from flexible materials such as silicone and hydrogel, which can realize anchoring and telescoping in the pipeline through the deformation of flexible materials and have good flexibility. However, due to the viscoelasticity and hysteresis of flexible materials, the soft pipeline robot usually exhibits small force and slow response speed, which is difficult to store and release a large amount of mechanical energy quickly, and the crawling speed is slow. In order to solve this problem, a soft pipeline robot that can realize fast crawling is designed. This robot was composed of an anchoring module and a telescoping module. The anchoring module employed flexural deformation of the flexible belt to achieve the anchoring in the pipeline, while the telescoping module utilized the soft continuum structure with tower springs as main part to facilitate extension and contraction. According to the experimental measurement, the maximum crawling speed of the robot in the pipeline was 102 mm/s and the maximum anchoring force was 76.4 N. The robot was capable of stable crawling in pipelines with inner diameter of 90-120 mm, and had good adaptability to different shapes of unstructured pipeline environment. The results demonstrate that the designed robot can not only achieve bidirectional crawling in horizontal and vertical pipelines, but also quickly pass through S-shaped pipelines, which can provide new ideas for the design and research of soft robots in unstructured pipelines.
|
|
Received: 18 December 2023
Published: 30 October 2024
|
|
|
|
Corresponding Authors:
Junfeng HU
E-mail: 2457540495@qq.com;hjfsuper@126.com
|
快速爬行软体管道机器人的设计与性能分析
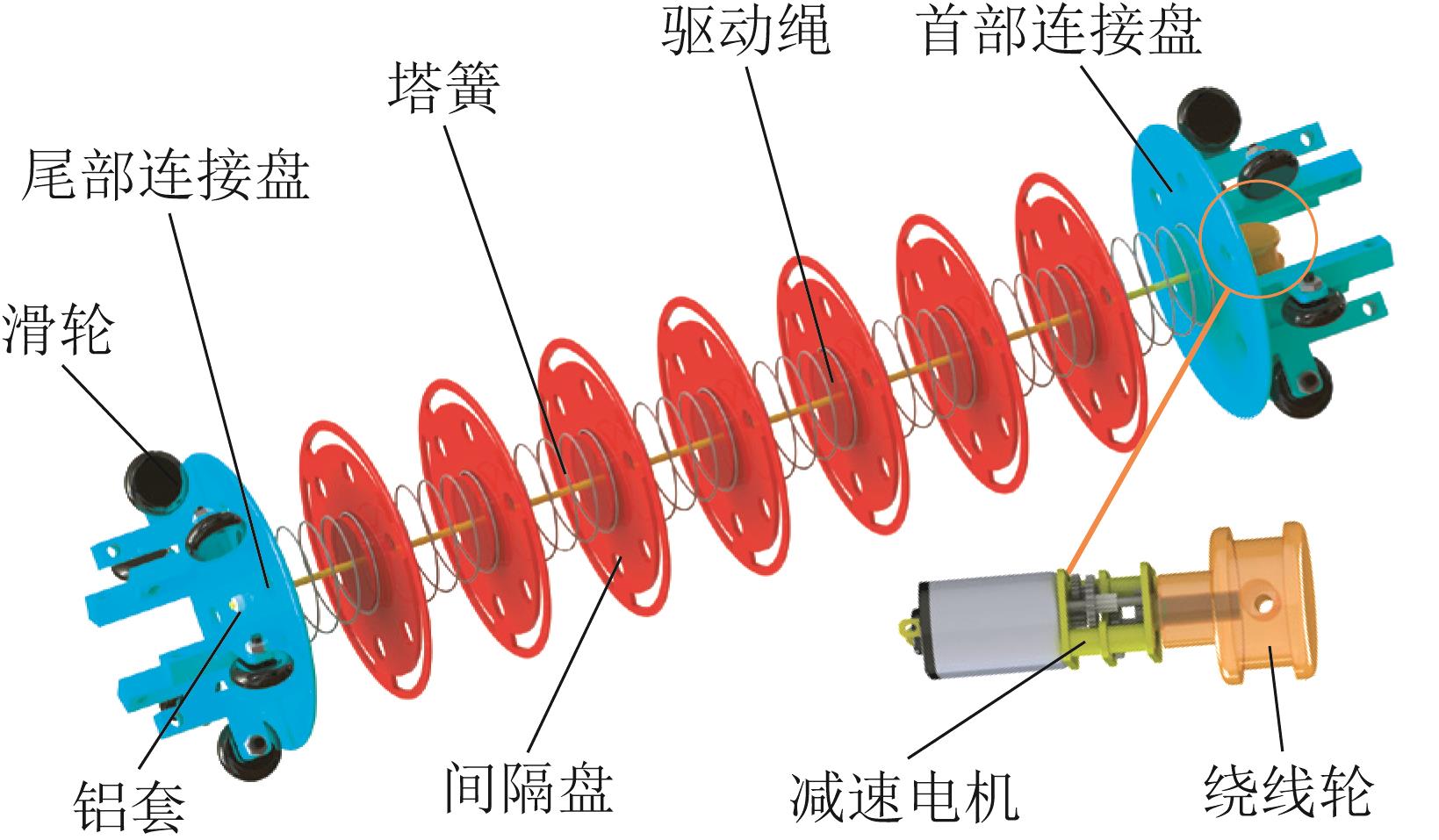
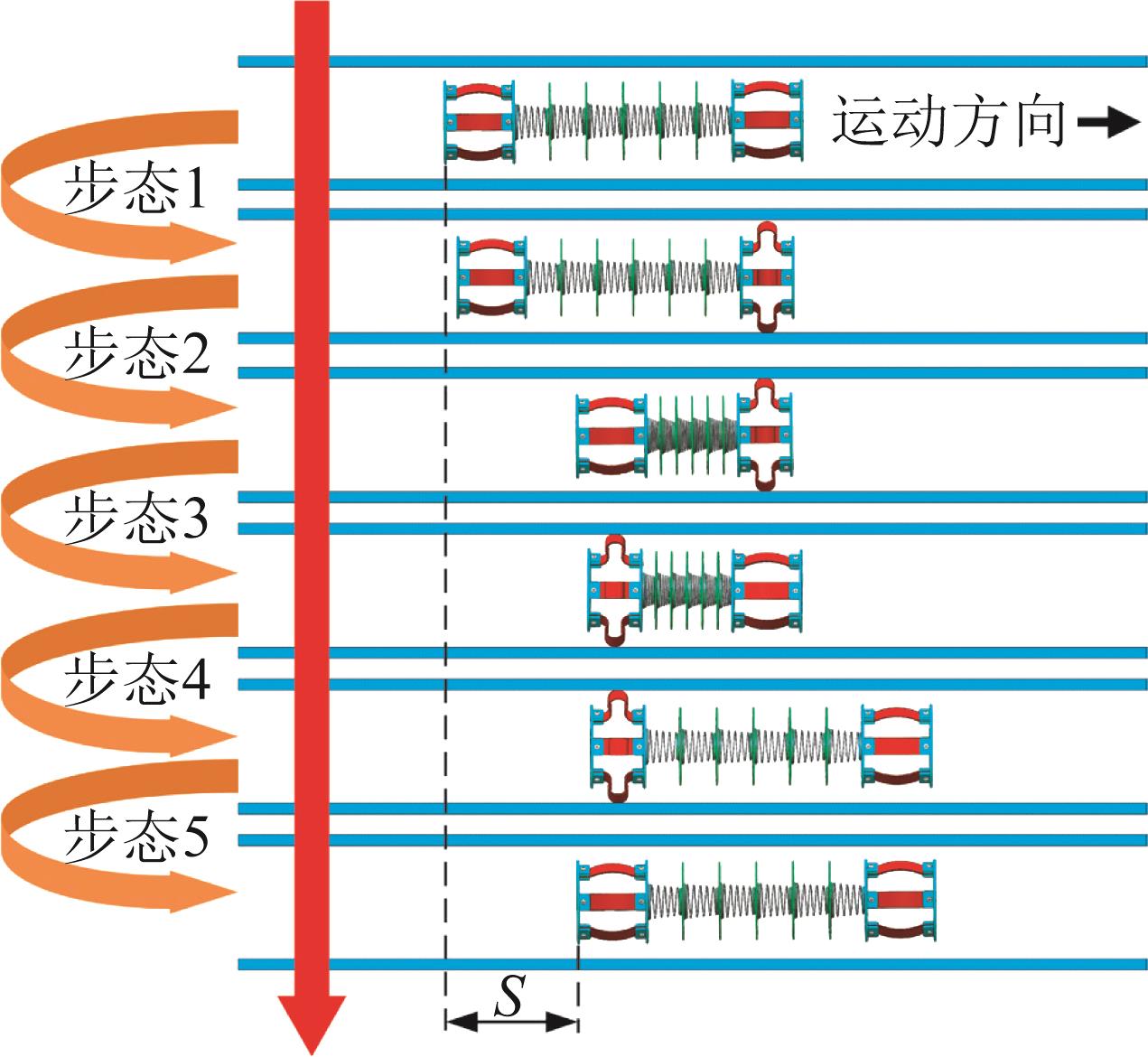
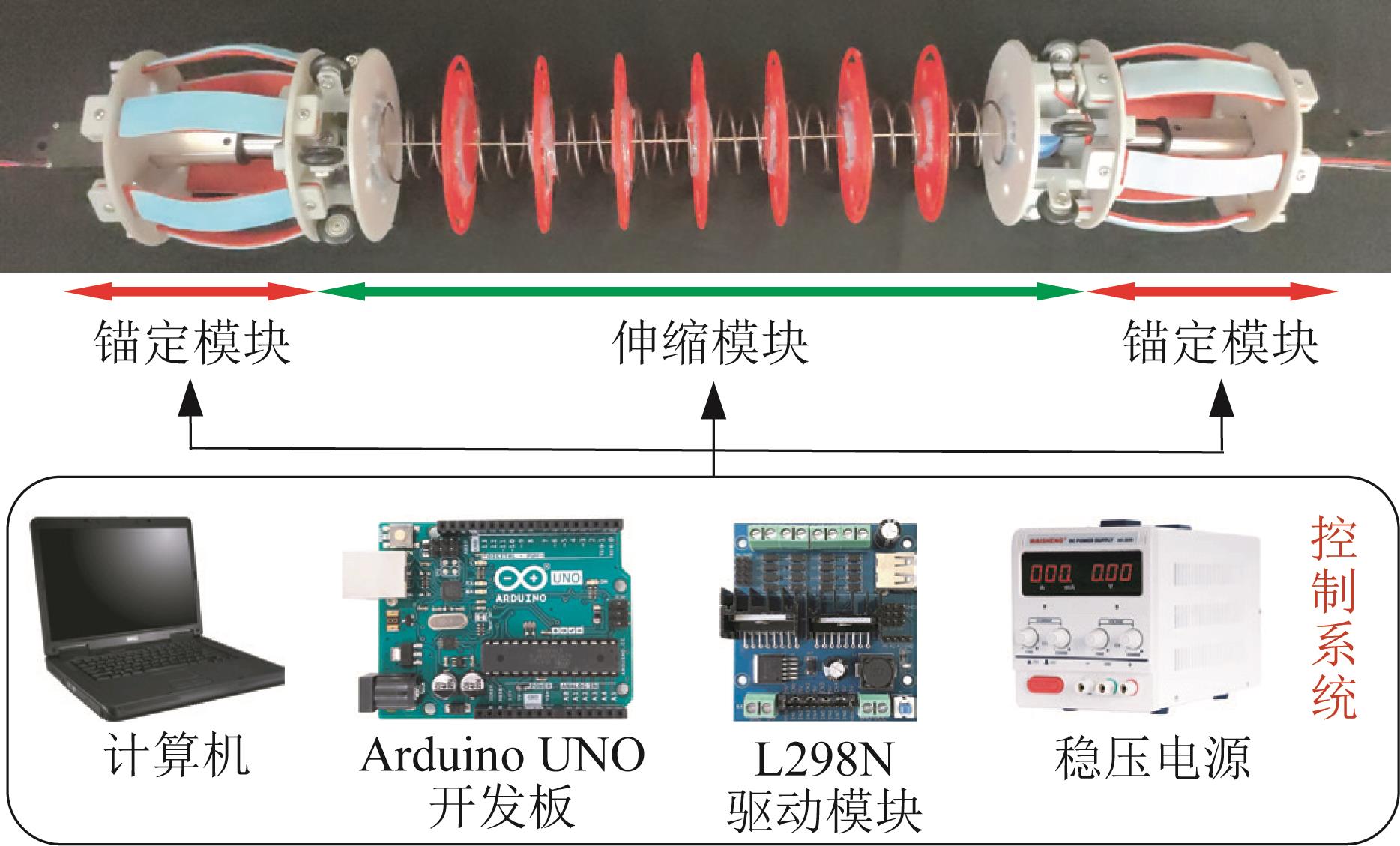
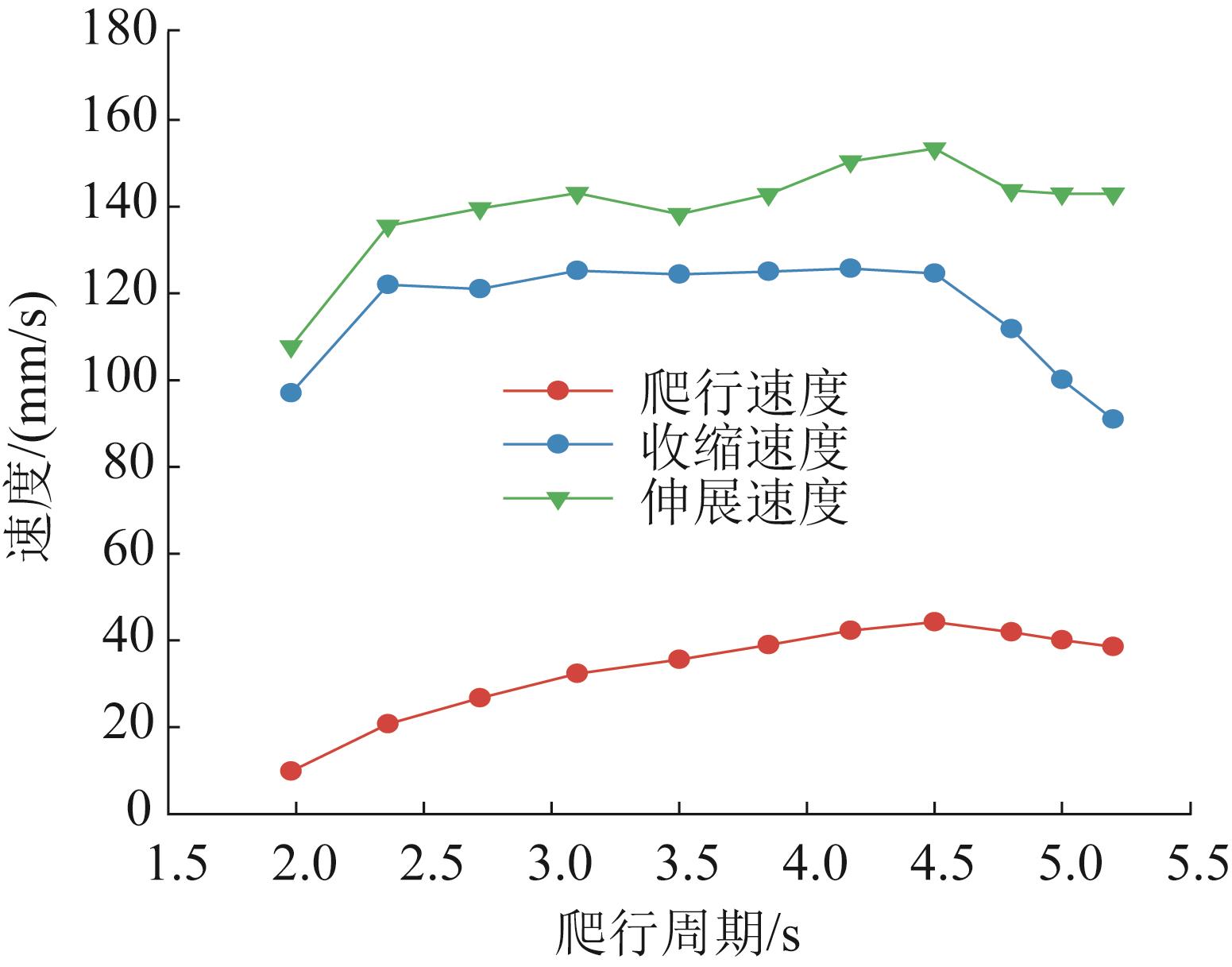
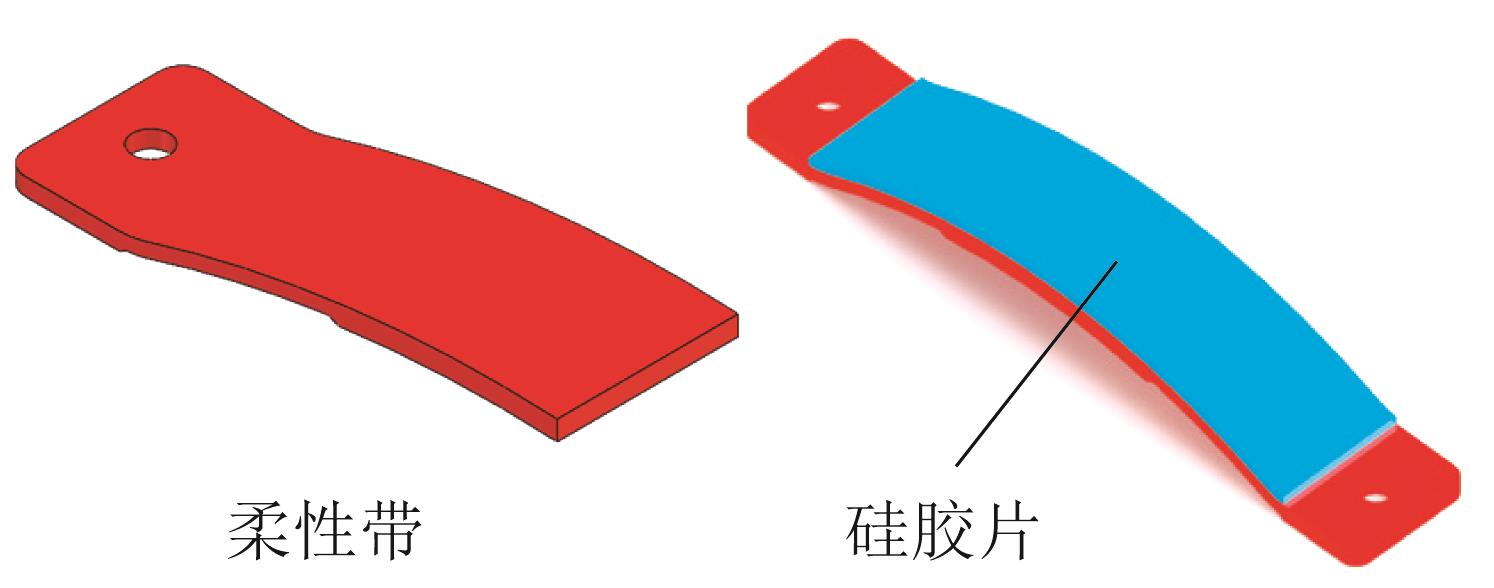
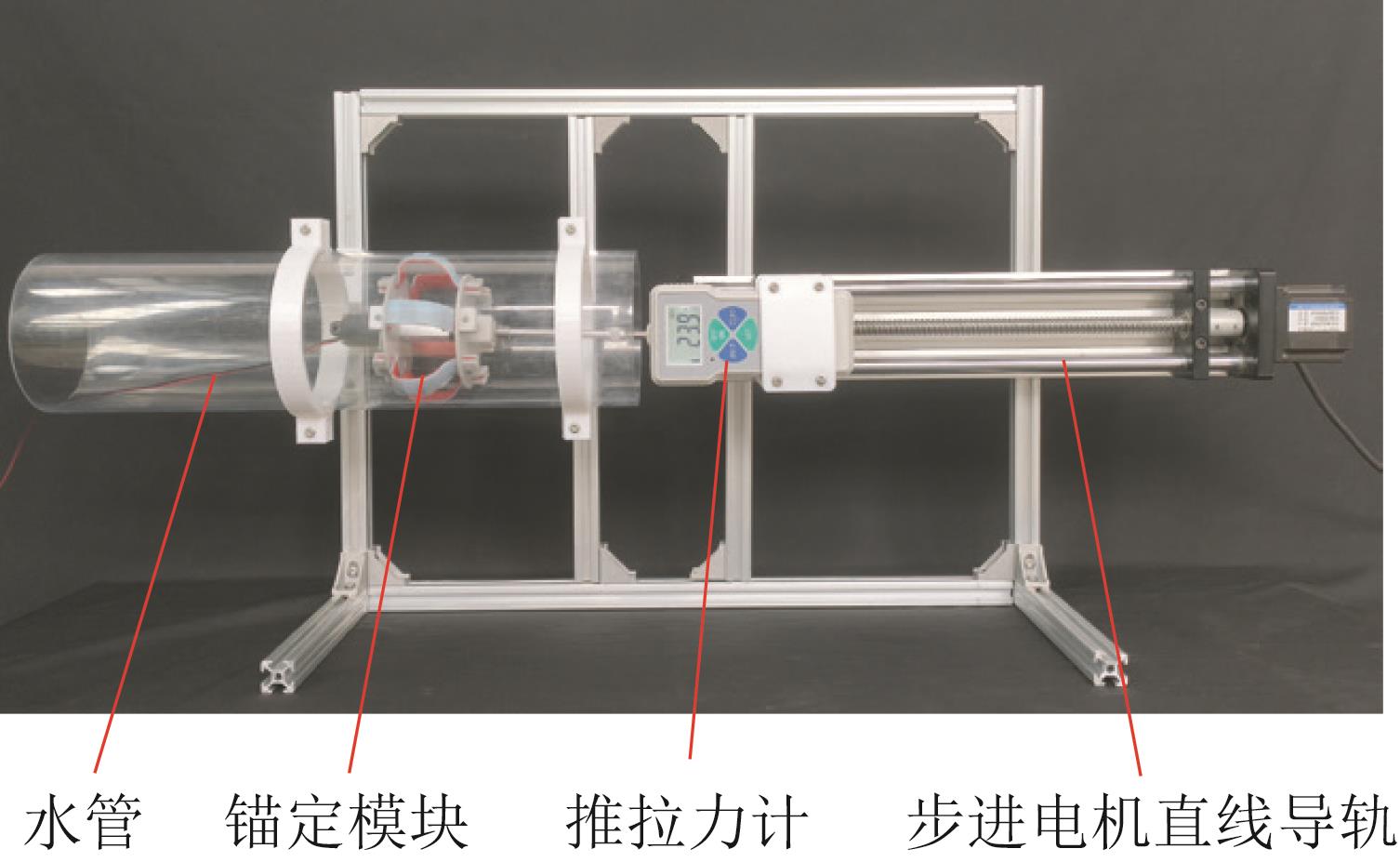
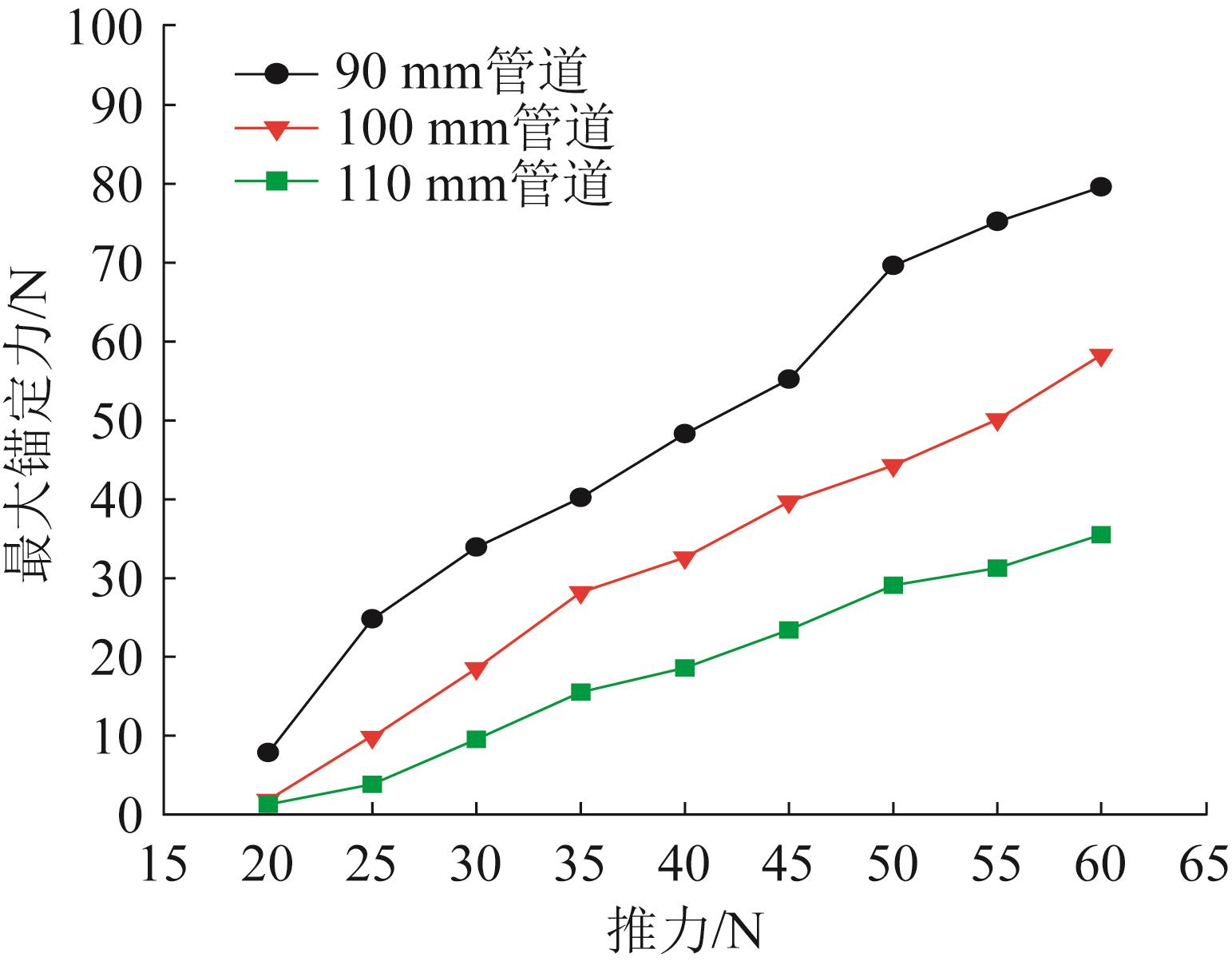
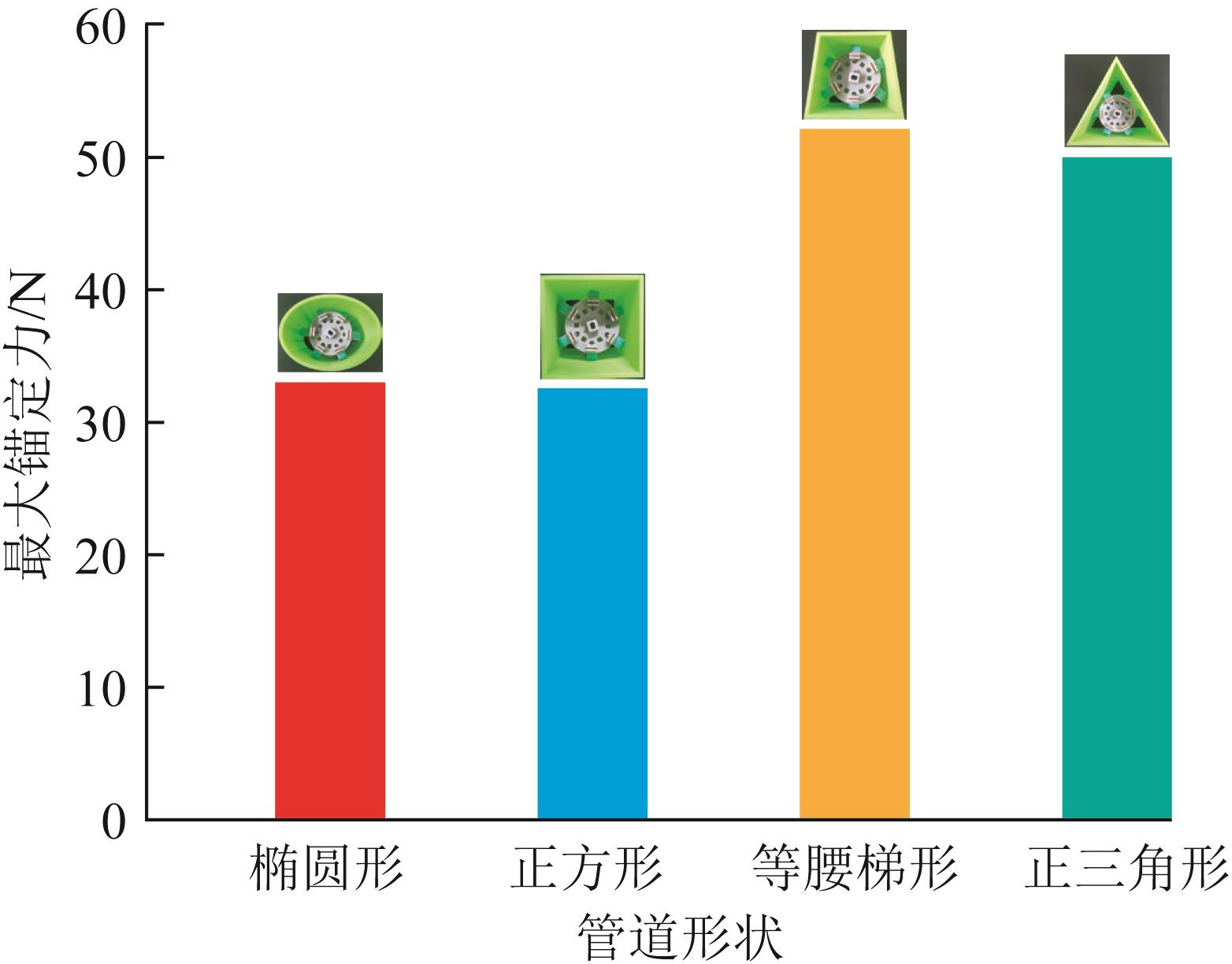
采用锚定-伸缩运动机制的软体管道机器人多以硅胶、水凝胶等柔性材料为主体,可通过柔性材料的变形来实现在管道内的锚定和伸缩,具有良好的柔顺性。但由于柔性材料具有黏弹性和滞后性,软体管道机器人通常表现出较小的作用力和较慢的响应速度,难以快速储存和释放大量机械能,爬行速度缓慢。为解决这一问题,设计了一种可实现快速爬行的软体管道机器人。该机器人由锚定模块和伸缩模块组成,锚定模块利用柔性带的屈曲变形来实现在管道内的锚定,伸缩模块采用以塔簧为主体的软连续体结构来实现伸展与收缩。通过实验测得,该机器人在管道内的最大爬行速度为102 mm/s,最大锚定力为76.4 N,其能够在内径为90~120 mm的管道内实现稳定爬行,且对不同形状的非结构化管道环境具有良好的适应性。结果表明,所设计的机器人不仅能够在水平和竖直管道内实现双向爬行,还能够快速通过S形管道,这可为非结构化管道内软体机器人的设计与研究提供新思路。
关键词:
软体管道机器人,
锚定模块,
伸缩模块,
软连续体结构,
适应性
|
|
| [1] |
KIM Y G, SHIN D H, MOON J I, et al. Design and implementation of an optimal in-pipe navigation mechanism for a steel pipe cleaning robot[C]//2011 8th International Conference on Ubiquitous Robots and Ambient Intelligence. Incheon, Nov. 23-26, 2011.
|
|
|
| [2] |
张云伟. 煤气管道检测机器人系统及其运动控制技术研究[D]. 上海: 上海交通大学, 2007: 27-34.
ZHANG Y W. Research on gas pipeline inspection robot and its motion control[D]. Shanghai: Shanghai Jiaotong University, 2007: 27-34.
|
|
|
| [3] |
CHOI H R, RYEW S M. Robotic system with active steering capability for internal inspection of urban gas pipelines[J]. Mechatronics, 2002, 12(5): 713-736.
|
|
|
| [4] |
PFEIFFER F, ROSSMANN T, LOFFLER K. Control of a tube crawling machine[C]//2000 2nd International Conference on Control of Oscillations and Chaos. St. Petersburg, Jul. 5-7, 2000.
|
|
|
| [5] |
ROCHE E T, HORVATH M A, WAMALA I, et al. Soft robotic sleeve supports heart function[J]. Science Translational Medicine, 2017, 9(373): eaaf3925.
|
|
|
| [6] |
POLYGERINOS P, WANG Z, GALLOWAY K C, et al. Soft robotic glove for combined assistance and at-home rehabilitation[J]. Robotics and Autonomous Systems, 2015, 73: 135-143.
|
|
|
| [7] |
CHEN S E, CAO Y T, SARPARAST M, et al. Soft crawling robots: design, actuation, and locomotion[J]. Advanced Materials Technologies, 2020, 5(2): 1900837.
|
|
|
| [8] |
VERMA M S, AINLA A, YANG D, et al. A soft tube-climbing robot[J]. Soft Robotics, 2018, 5(2): 133-137.
|
|
|
| [9] |
ZHANG B Y, FAN Y W, YANG P H, et al. Worm-like soft robot for complicated tubular environments[J]. Soft Robotics, 2019, 6(3): 399-413.
|
|
|
| [10] |
YAMAMOTO T, SAKAMA S, KAMIMURA A. Pneumatic duplex-chambered inchworm mechanism for narrow pipes driven by only two air supply lines[J]. IEEE Robotics and Automation Letters, 2020, 5(4): 5034-5042.
|
|
|
| [11] |
WEN L, WEAVER J C, LAUDER G V. Biomimetic shark skin: design, fabrication and hydrodynamic function[J]. Journal of Experimental Biology, 2014, 217(10): 1656-1666.
|
|
|
| [12] |
LIN Y, XU Y X, JUANG J Y. Single-actuator soft robot for in-pipe crawling[J]. Soft Robotics, 2023, 10(1): 174-186.
|
|
|
| [13] |
TANG Y C, CHI Y D, SUN J F, et al. Leveraging elastic instabilities for amplified performance: pine-inspired high-speed and high-force soft robots[J]. Science Advances, 2020, 6(19): eaaz6912.
|
|
|
| [14] |
QI X D, SHI H Y, PINTO T, et al. A novel pneumatic soft snake robot using traveling-wave locomotion in constrained environments[J]. IEEE Robotics and Automation Letters, 2020, 5(2): 1610-1617.
|
|
|
| [15] |
ZARROUK D, MANN M, DEGANI N, et al. Single actuator wave-like robot (SAW): design, modeling, and experiments[J]. Bioinspiration & Biomimetics, 2016, 11(4): 046004.
|
|
|
| [16] |
SALEM L, GAT A D, OR Y. Fluid-driven traveling waves in soft robots[J]. Soft Robotics, 2022, 9(6): 1134-1143.
|
|
|
| [17] |
ZE Q J, WU S, NISHIKAWA J, et al. Soft robotic origami crawler[J]. Science Advances, 2022, 8(13): eabm7834.
|
|
|
| [18] |
YEH C Y, CHOU S C, HUANG H W, et al. Tube-crawling soft robots driven by multistable buckling mechanics[J]. Extreme Mechanics Letters, 2019, 26: 61-68.
|
|
|
| [19] |
YAMAMOTO T, KONYO M, TADOKORO S. A high-speed locomotion mechanism using pneumatic hollow-shaft actuators for in-pipe robots[C]//2015 IEEE/RSJ International Conference on Intelligent Robots and Systems. Hamburg, Sep. 28-Oct. 2, 2015.
|
|
|
| [20] |
RUS D, TOLLEY M T. Design, fabrication and control of soft robots[J]. Nature, 2015, 521(7553): 467-475.
|
|
|
| [21] |
朱靖, 齐飞, 佘世刚, 等. 绳驱动柔性机器人运动学建模及主从控制研究[J]. 机电工程, 2023, 40(2): 266-274.
ZHU J, QI F, SHE S G, et al. Kinematics modeling and master-slave control for rope driven flexible robot[J]. Journal of Mechanical & Electrical Engineering, 2023, 40(2): 266-274.
|
|
|
| [22] |
IKEUCHI M, NAKAMURA T, MATSUBARA D. Development of an in-pipe inspection robot for narrow pipes and elbows using pneumatic artificial muscles[C]//2012 IEEE/RSJ International Conference on Intelligent Robots and Systems. Vilamoura-Algarve, Oct. 7-12, 2012.
|
|
|
| [23] |
YU W K, LI X, CHEN D Y, et al. A minimally designed soft crawling robot for robust locomotion in unstructured pipes[J]. Bioinspiration and Biomimetics, 2022, 17(5): 056001.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|