| Optimization Design |
|


|
|
|
| Simulation and optimization of crawler chassis of idler replacement robot |
Liyong TIAN( ),Hua AO(),Ning YU,Rui TANG ),Hua AO(),Ning YU,Rui TANG |
| School of Mechanical Engineering, Liaoning Technical University, Fuxin 123000, China |
|
|
|
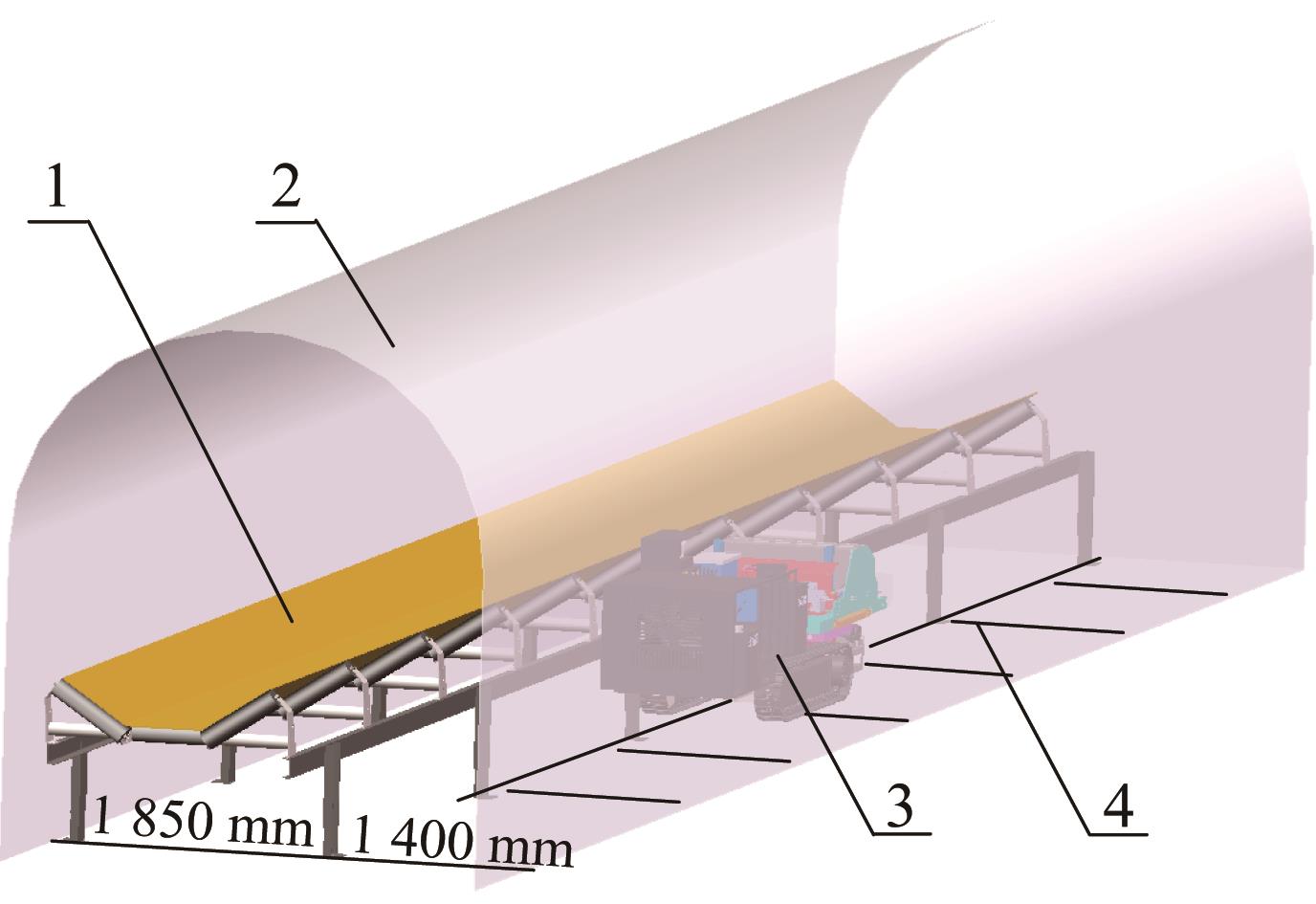
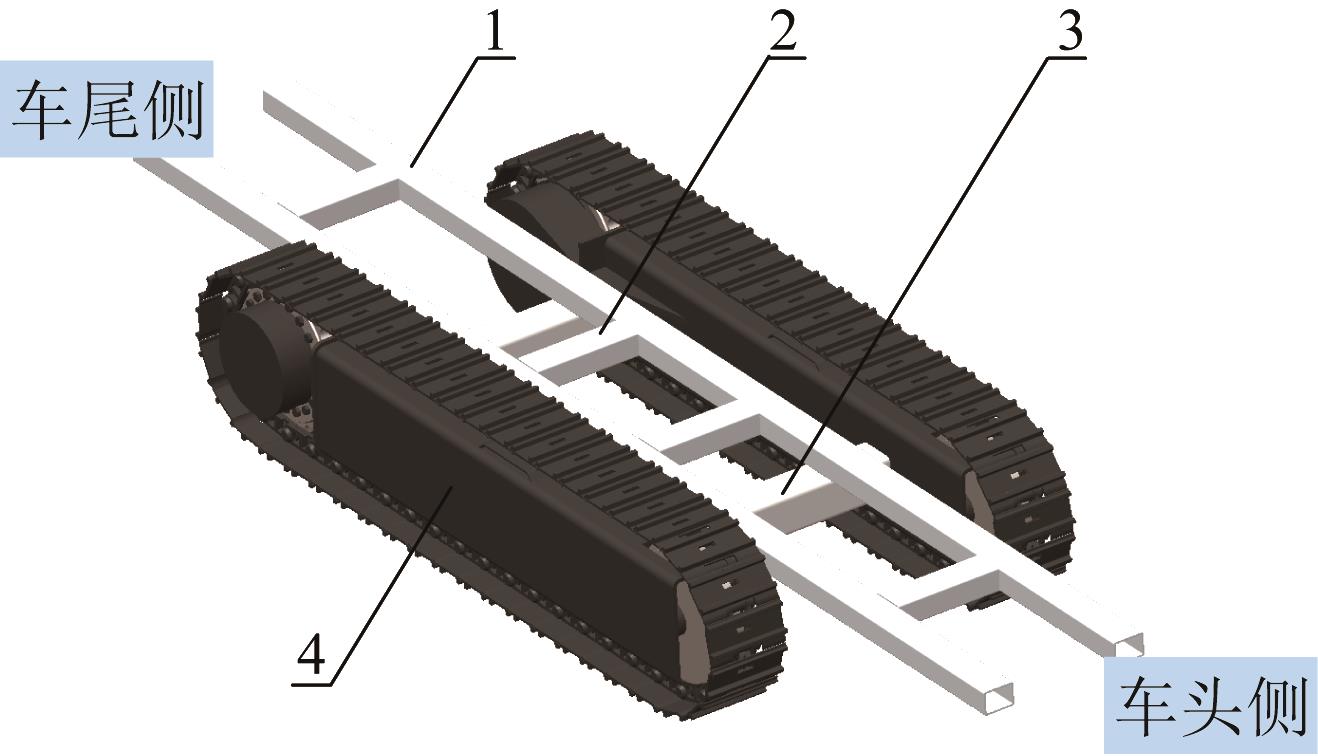
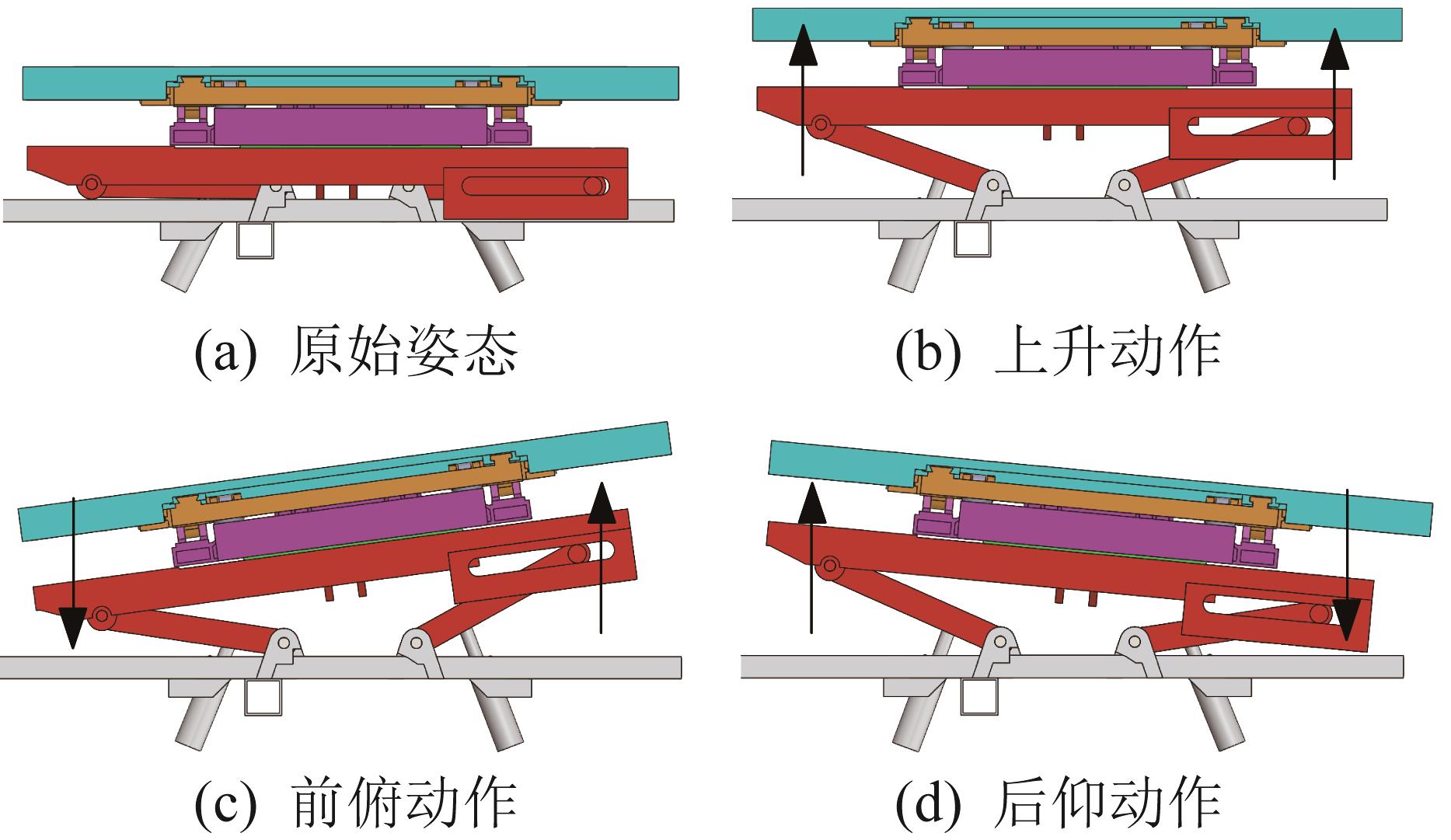
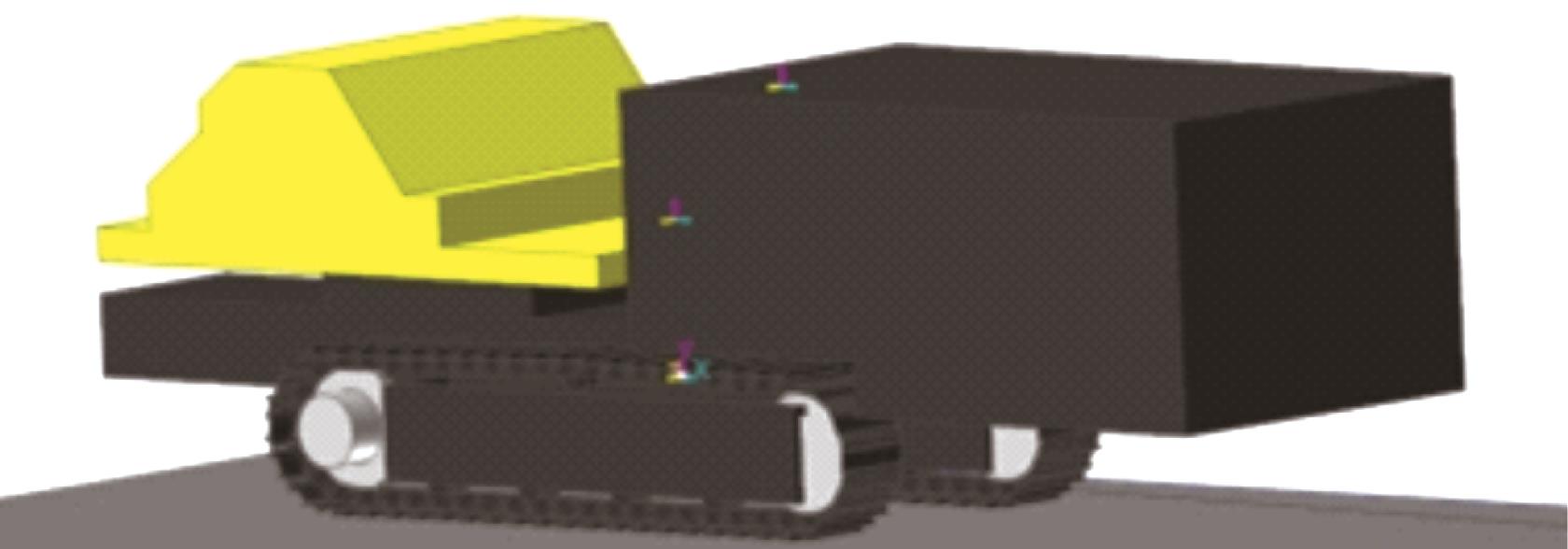
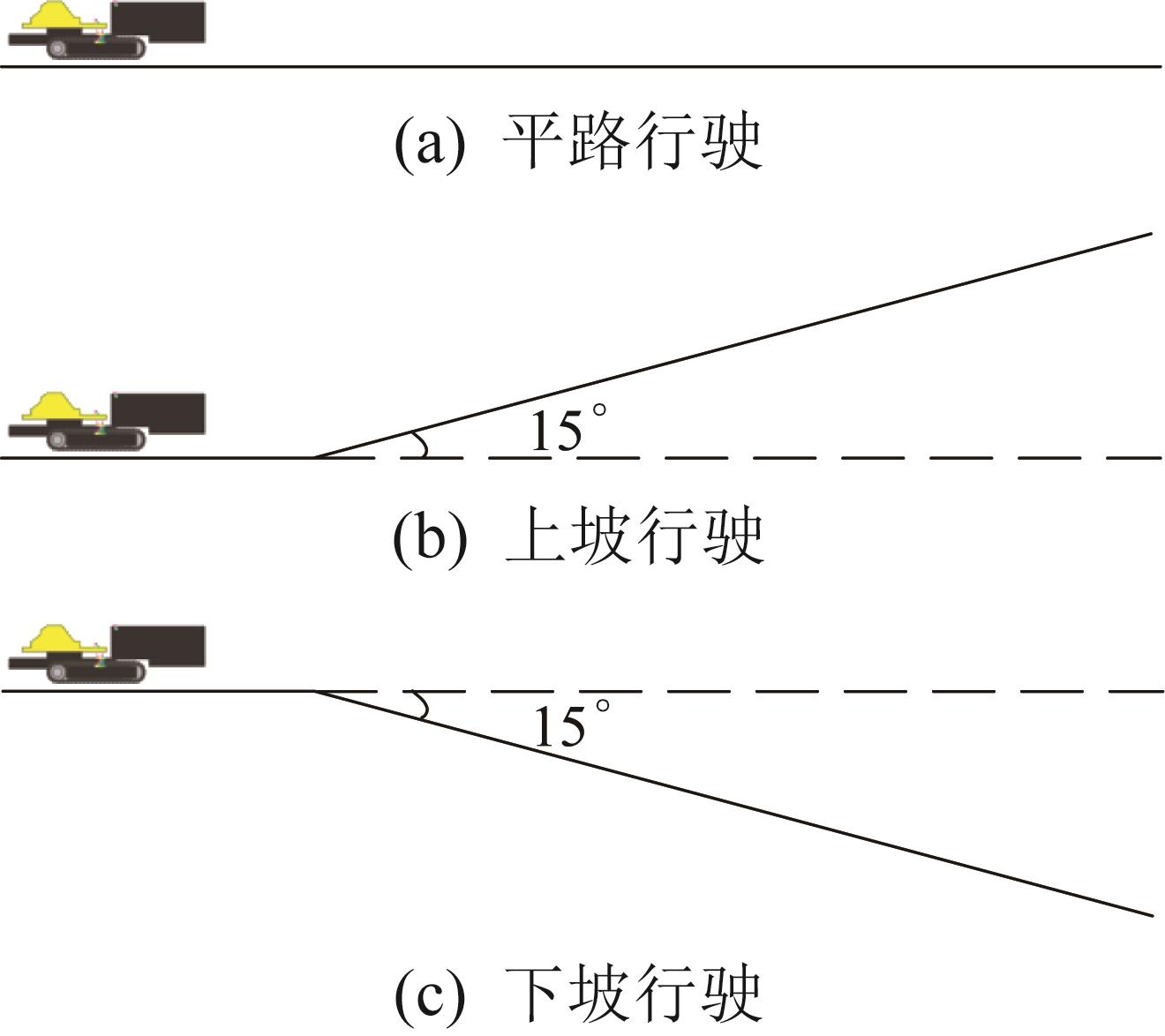
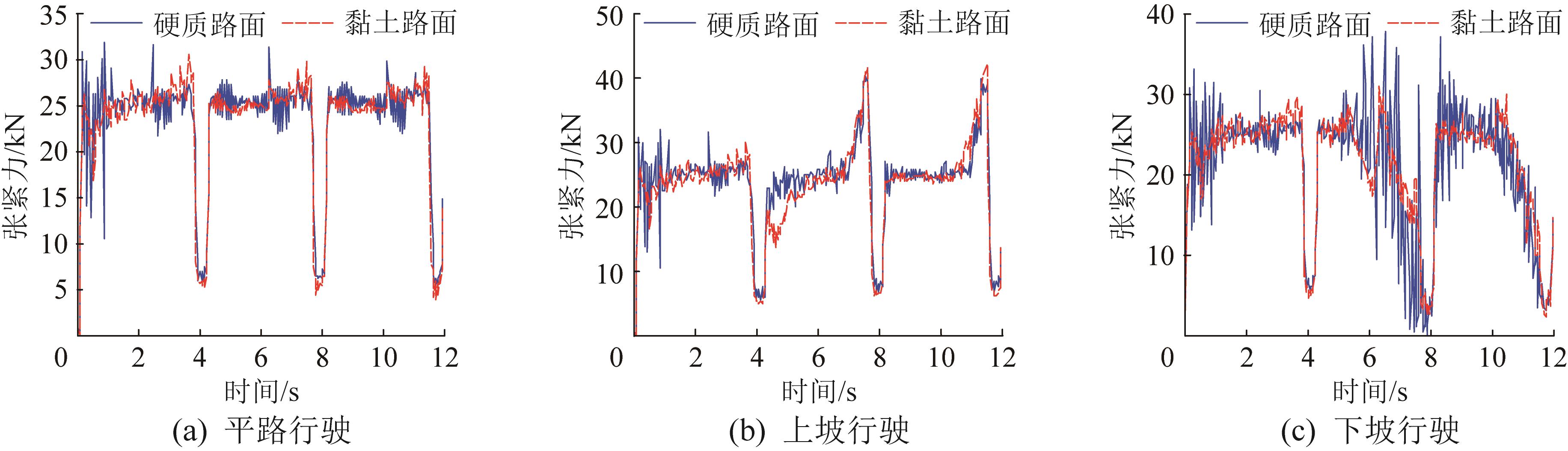
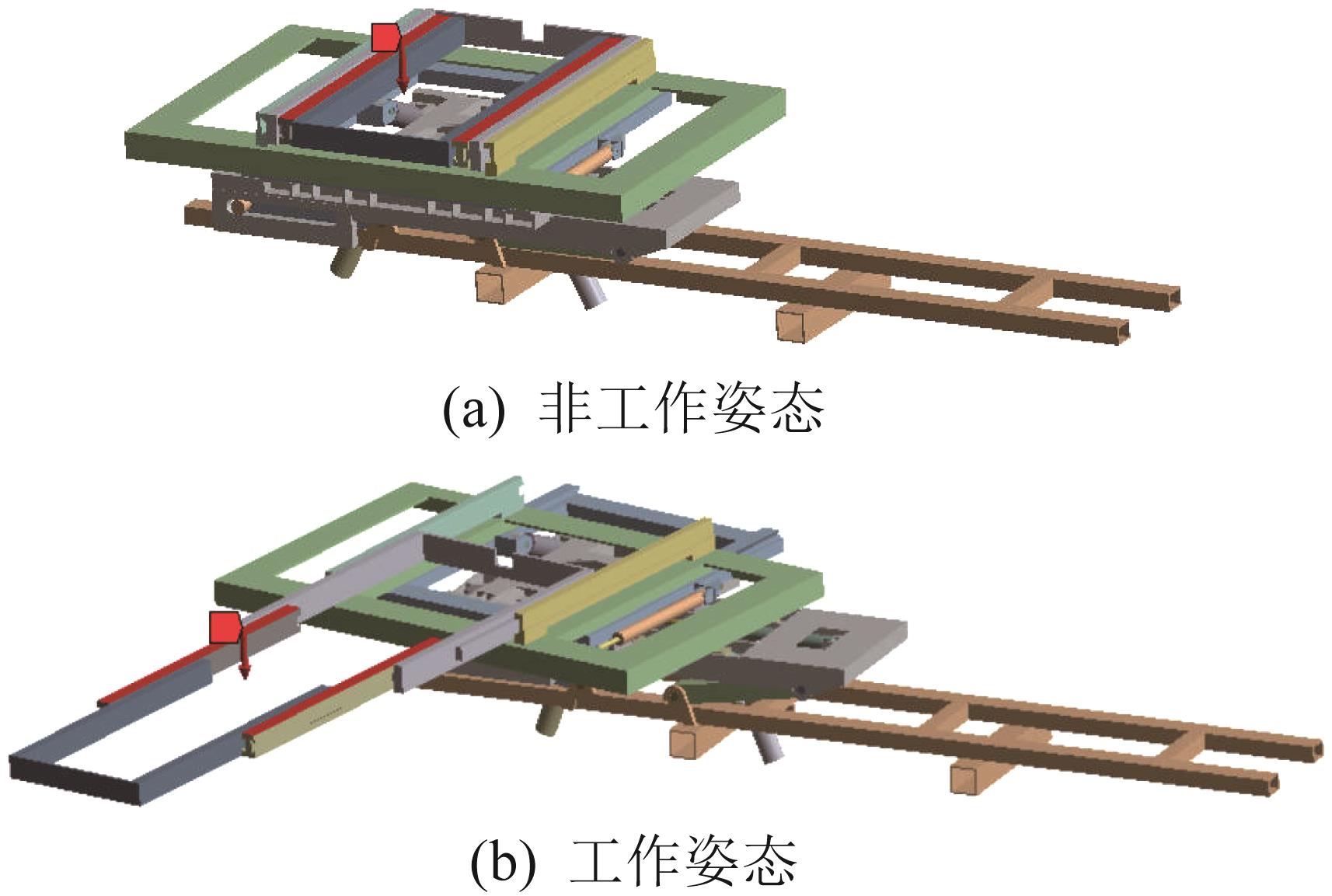
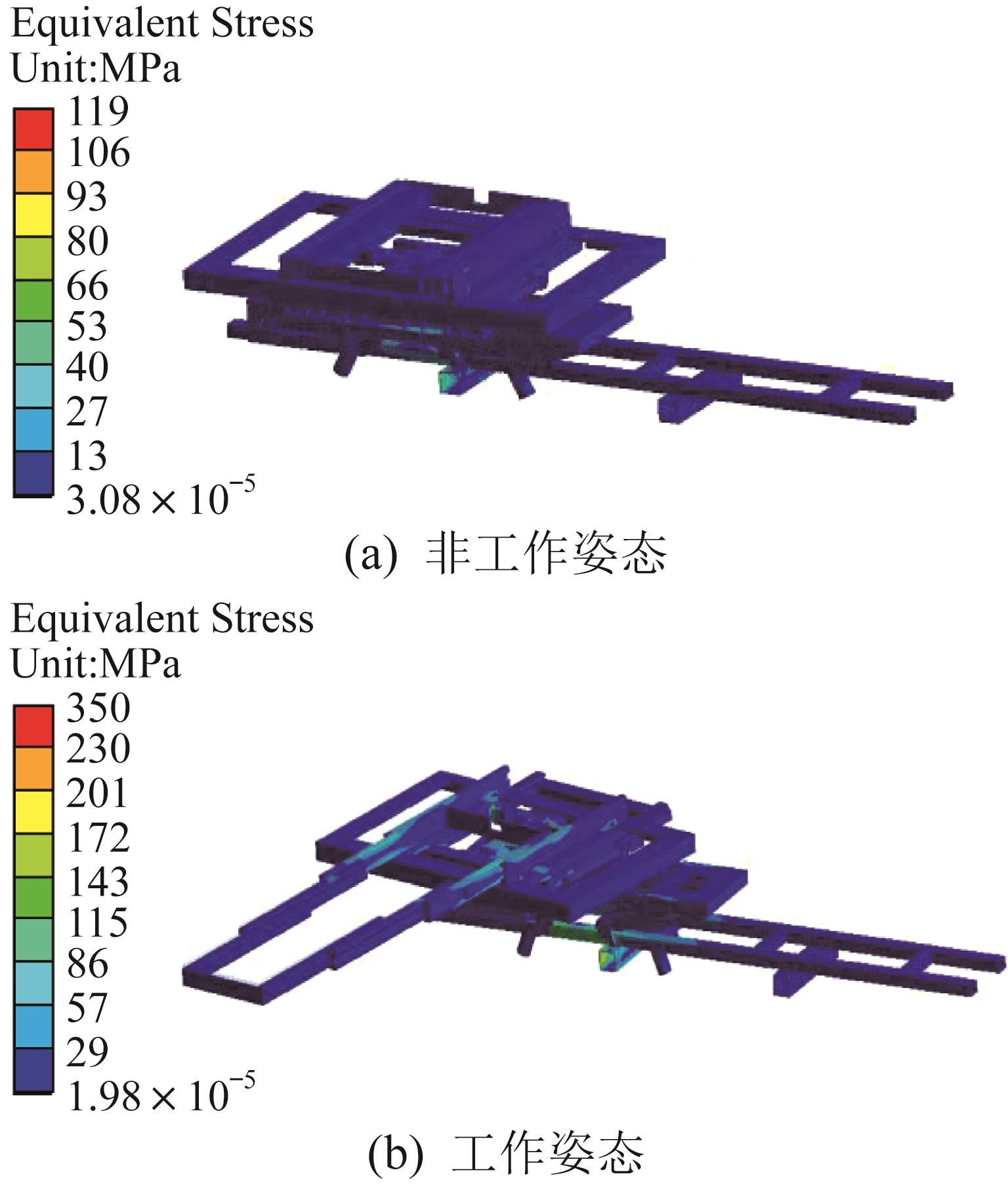
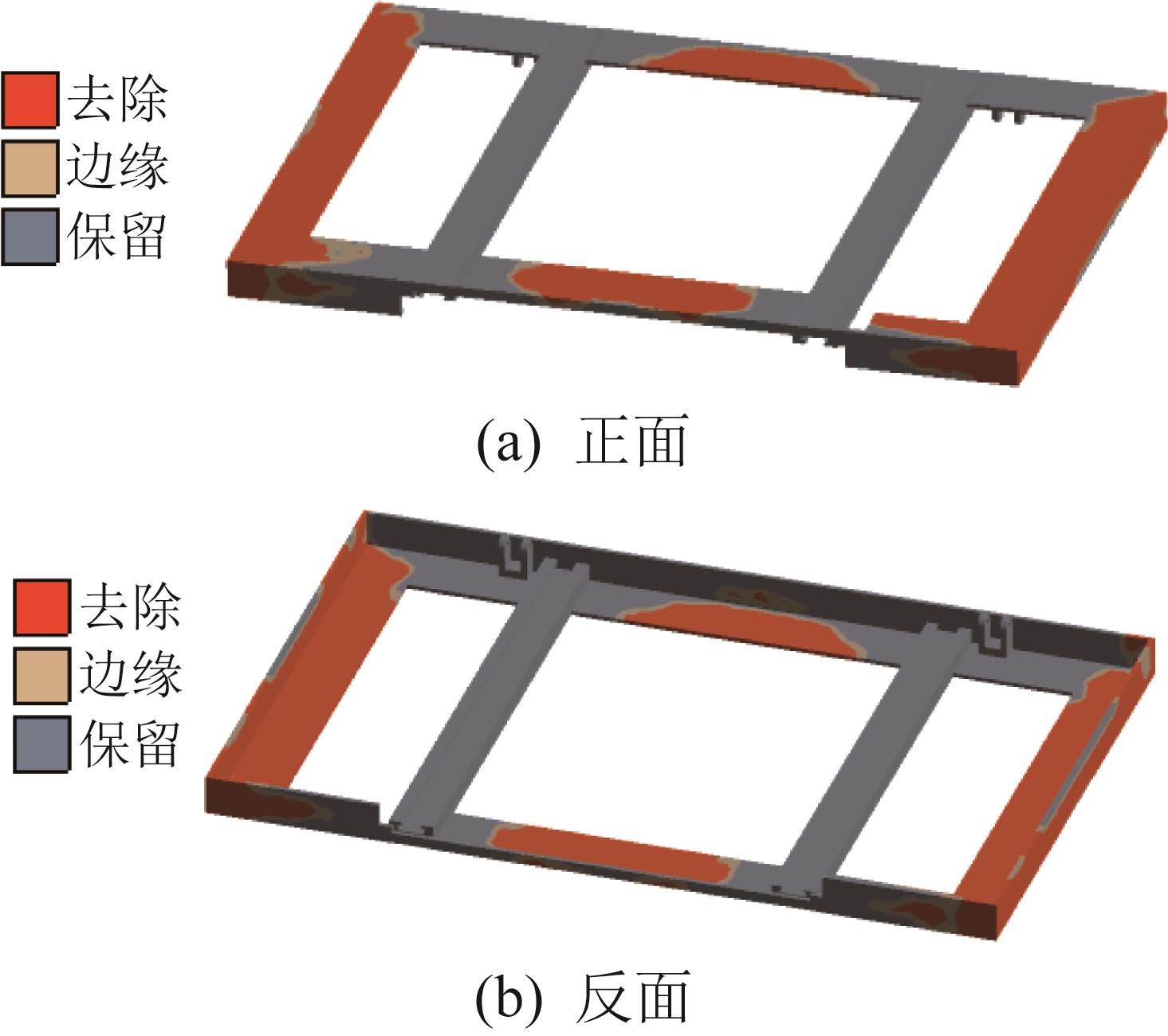
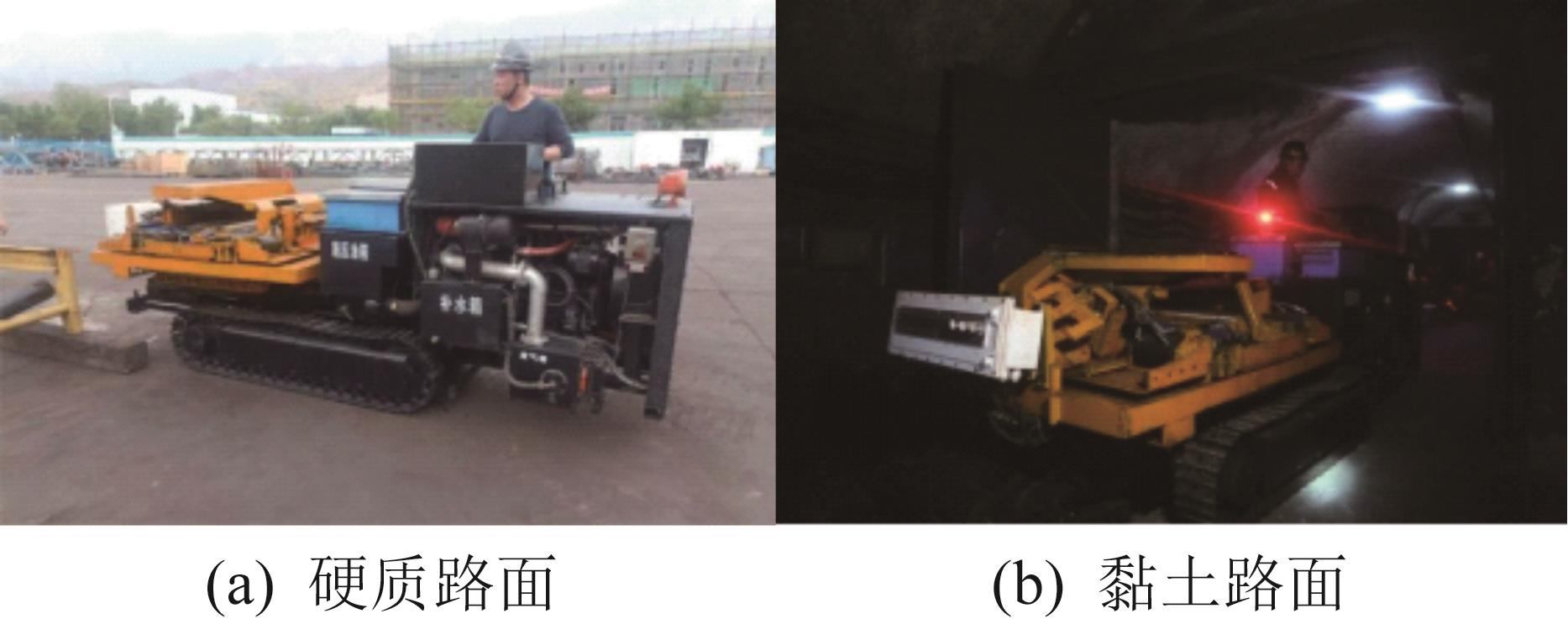
Abstract In order to meet the needs of idler replacement robot operating on complex road surface and narrow long-distance roadway in coal mine, a crawler chassis with attitude adjustment mechanism was designed, and the mechanical performance analysis and key component optimization for the chassis were conducted based on the terrain characteristics of coal mine. Firstly, the dynamics model of the crawler walking mechanism was established by the multi-body dynamics simulation software RecurDyn, and six classical working conditions were simulated and analyzed. The rationality of the structure design of the crawler walking mechanism was verified by comparing the simulated and theoretical values of the tensioning force and driving torque of crawler. Then, the statics analysis for the attitude adjustment mechanism was conducted in the ANSYS Workbench software, and the topology optimization of its key components was carried out to improve material utilization and reduce weight. Finally, the stability of the crawler chassis was tested by conducting robot driving tests. The results showed that the maximum stress and mass of the transverse platform of the optimized attitude adjustment mechanism were reduced by 13.71 MPa and 36.92%, respectively. The robot could drive stably under different road conditions, and its attitude adjustment mechanism could work normally. The research results can provide reference for the driving performance optimization of crawler coal mine electromechanical equipment under complex working conditions.
|
|
Received: 27 November 2023
Published: 30 October 2024
|
|
|
|
Corresponding Authors:
Hua AO
E-mail: tianliyong2003@163.com;869847215@qq.com
|
更换托辊机器人履带式底盘的仿真与优化
为满足更换托辊机器人在煤矿井下复杂路面上以及狭窄长运距巷道内作业的需求,设计了带有姿态调整机构的履带式底盘,并结合煤矿井下的地形特征对底盘进行力学性能分析和关键部件优化。首先,利用多体动力学仿真软件RecurDyn建立履带行走机构的动力学模型,对6种经典工况进行仿真分析,通过对比履带张紧力和行驶转矩的仿真值与理论值来验证履带行走机构结构设计的合理性。然后,在ANSYS Workbench软件中对姿态调整机构进行静力学分析,并对其关键部件进行拓扑优化,以提高材料利用率并实现减重。最后,通过开展机器人行驶试验来测试履带式底盘的稳定性。结果表明,优化后姿态调整机构横移平台的最大应力降低了13.71 MPa,质量减小了36.92%;机器人在不同路况下均能稳定行驶且其姿态调整机构可正常工作。研究结果可为复杂工况下履带式煤矿机电设备的行驶性能优化提供参考。
关键词:
履带式底盘,
多体动力学仿真,
拓扑优化,
履带张紧力,
行驶转矩
|
|
| [1] |
杨兰峰. 国内外带式输送机的现状及发展趋势[J]. 机械管理开发, 2016, 31(4): 119-120.
YANG L F. Development trend and status of belt conveyor[J]. Mechanical Management and Development, 2016, 31(4): 119-120.
|
|
|
| [2] |
曲建平. 煤矿带式输送机现状与发展趋势[J]. 煤炭科技, 2015, 36(4): 146-147.
QU J P. Present situation and development trend of belt conveyor in coal mine[J]. Coal Science & Technology Magazine, 2015, 36(4): 146-147.
|
|
|
| [3] |
沈鑫, 杨金艳. 皮带机托辊更换工具的研制及应用[J]. 黄金, 2016, 37(10): 51-53.
SHEN X, YANG J Y. Development and application of belt conveyor roller replacement tools[J]. Gold, 2016, 37(10): 51-53.
|
|
|
| [4] |
李雨潭, 李猛钢, 朱华. 煤矿搜救机器人履带式行走机构性能评价体系[J]. 工程科学学报, 2017, 39(12): 1913-1921.
LI Y T, LI M G, ZHU H. Performance evaluation system of the tracked walking mechanism of a coal mine rescue robot[J]. Chinese Journal of Engineering, 2017, 39(12): 1913-1921.
|
|
|
| [5] |
MOCERA F, NICOLINI A. Multibody simulation of a small size farming tracked vehicle[J]. Procedia Structural Integrity, 2018, 8: 118-125.
|
|
|
| [6] |
CHEN B Y, SUN X C, ZHENG K F, et al. A rigid flexible coupling dynamics simulation of one type of tracked vehicle based on the RecurDyn[C]//2017 IEEE International Conference on Mechatronics and Automation. Takamatsu, Aug. 6-9, 2017.
|
|
|
| [7] |
廖凯, 古全元, 高自成, 等. 芦苇笋采收机研制[J]. 农业工程学报, 2021, 37(15): 20-30.
LIAO K, GU Q Y, GAO Z C, et al. Development of reed shoot harvesters[J]. Transactions of the Chinese Society of Agricultural Engineering, 2021, 37(15): 20-30.
|
|
|
| [8] |
张德俊, 林蜀云, 吉旭, 等. 山地辣椒收获机履带受力分析及仿真[J]. 机械设计, 2022, 39(3): 83-90.
ZHANG D J, LIN S Y, JI X, et al. Stress analysis and simulation of the mountain pepper harvester's track[J]. Journal of Machine Design, 2022, 39(3): 83-90.
|
|
|
| [9] |
欧阳益斌, 李立君, 汤刚车, 等. 油茶林抚育机履带底盘设计与试验研究[J]. 西北林学院学报, 2018, 33(2): 252-256.
OUYANG Y B, LI L J, TANG G C, et al. Design and experimental research on crawler chassis of oil tea plantation tending machine[J]. Journal of Northwest Forestry University, 2018, 33(2): 252-256.
|
|
|
| [10] |
丁肇, 李耀明, 任利东, 等. 履带式行走机构压实作用下土壤应力分布均匀性分析[J]. 农业工程学报, 2020, 36(9): 52-58.
DING Z, LI Y M, REN L D, et al. Distribution uniformity of soil stress under compaction of tracked undercarriage[J]. Transactions of the Chinese Society of Agricultural Engineering, 2020, 36(9): 52-58.
|
|
|
| [11] |
WONG J Y, HUANG W. Evaluation of the effects of design features on tracked vehicle mobility using an advanced computer simulation model[J]. International Journal of Heavy Vehicle Systems, 2005, 12(4): 344-365.
|
|
|
| [12] |
AL-MILLI S, SENEVIRATNE L D, ALTHOEFER K. Track-terrain modelling and traversability prediction for tracked vehicles on soft terrain[J]. Journal of Terramechanics, 2010, 47(3): 151-160.
|
|
|
| [13] |
SOJKA M, CORNAK S. Tracked vehicle movement modelling[C]//17th International Scientific Conference Engineering for Rural Development. Jelgava, May 23-25, 2018.
|
|
|
| [14] |
MȨŻYK A, CZAPLA T, KLEIN W, et al. Numerical simulation of active track tensioning system for autonomous hybrid vehicle[J]. Mechanical Systems and Signal Processing, 2017, 89: 108-118.
|
|
|
| [15] |
陈媛媛. 履带车辆行动系统动力学仿真分析[D]. 沈阳: 沈阳理工大学, 2012.
CHEN Y Y. The dynamic analysis and simulation of tracked vehicles[D]. Shenyang: Shenyang Ligong University, 2012.
|
|
|
| [16] |
白意东, 孙凌宇, 张明路, 等. 履带机器人地面力学研究进展[J]. 机械设计, 2020, 37(10): 1-13.
BAI Y D, SUN L Y, ZHANG M L, et al. Progress of research on terramechanics for tracked mobile robots[J]. Journal of Machine Design, 2020, 37(10): 1-13.
|
|
|
| [17] |
刘妤, 张拓, 谢铌, 等. 小型农用履带底盘多体动力学建模及验证[J]. 农业工程学报, 2019, 35(7): 39-46.
LIU Y, ZHANG T, XIE N, et al. Multi-body dynamic modeling and verification of small agricultural crawler chassis[J]. Transactions of the Chinese Society of Agricultural Engineering, 2019, 35(7): 39-46.
|
|
|
| [18] |
ZHENG J Q, GAO H B, YUAN B F, et al. Design and terramechanics analysis of a Mars rover utilising active suspension[J]. Mechanism and Machine Theory, 2018, 128: 125-149.
|
|
|
| [19] |
KOUELO A F, MATHIEU A F, JULIEN A, et al. Variation of physical and chemical properties of soils under different cropping systems in the watershed of Kpocomey, Southern Benin[J]. Open Journal of Soil Science, 2020, 10(11): 501-517.
|
|
|
| [20] |
朱双霞. 机械设计[M]. 重庆: 重庆大学出版社, 2019: 3-5.
ZHU S X. Mechanical design[M]. Chongqing: Chongqing University Press, 2019: 3-5.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|