| Robotic and Mechanism Design |
|


|
|
|
| Structure optimization and analysis of pole-climbing robot based on SIMP method |
Xiaofei ZHENG( ),Zhenhai HUANG,Xiaolong MA,Jianxin WANG,Binrui WANG() ),Zhenhai HUANG,Xiaolong MA,Jianxin WANG,Binrui WANG() |
| College of Mechanical and Electrical Engineering, China Jiliang University, Hangzhou 310018, China |
|
|
|
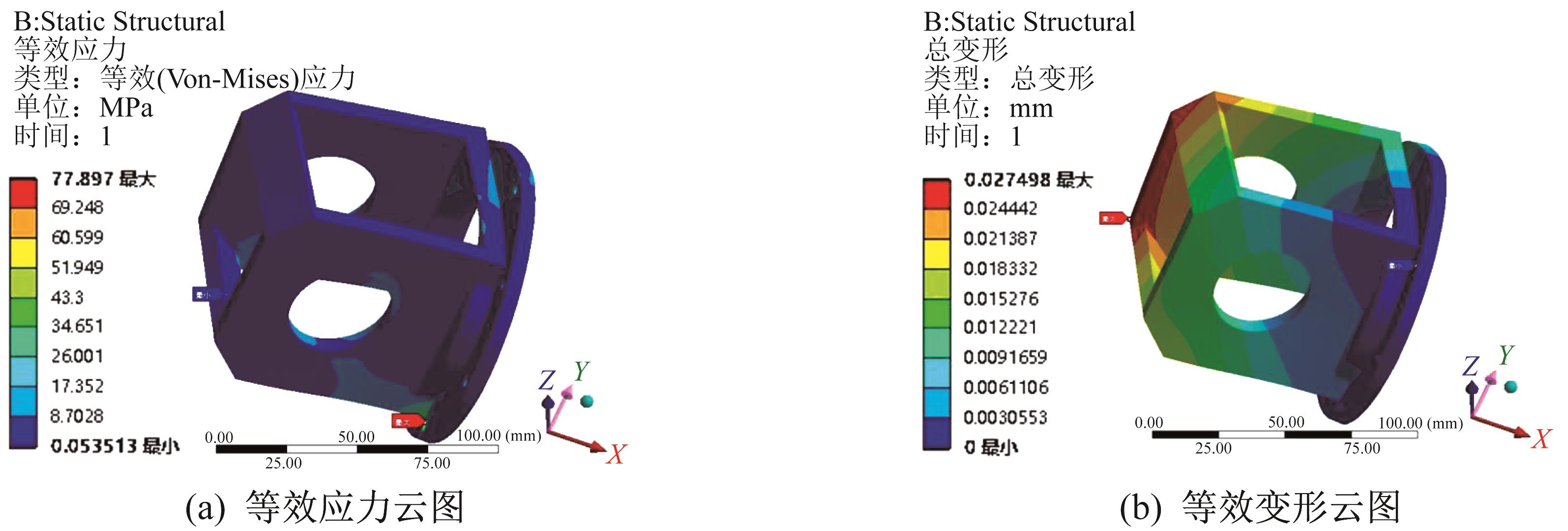
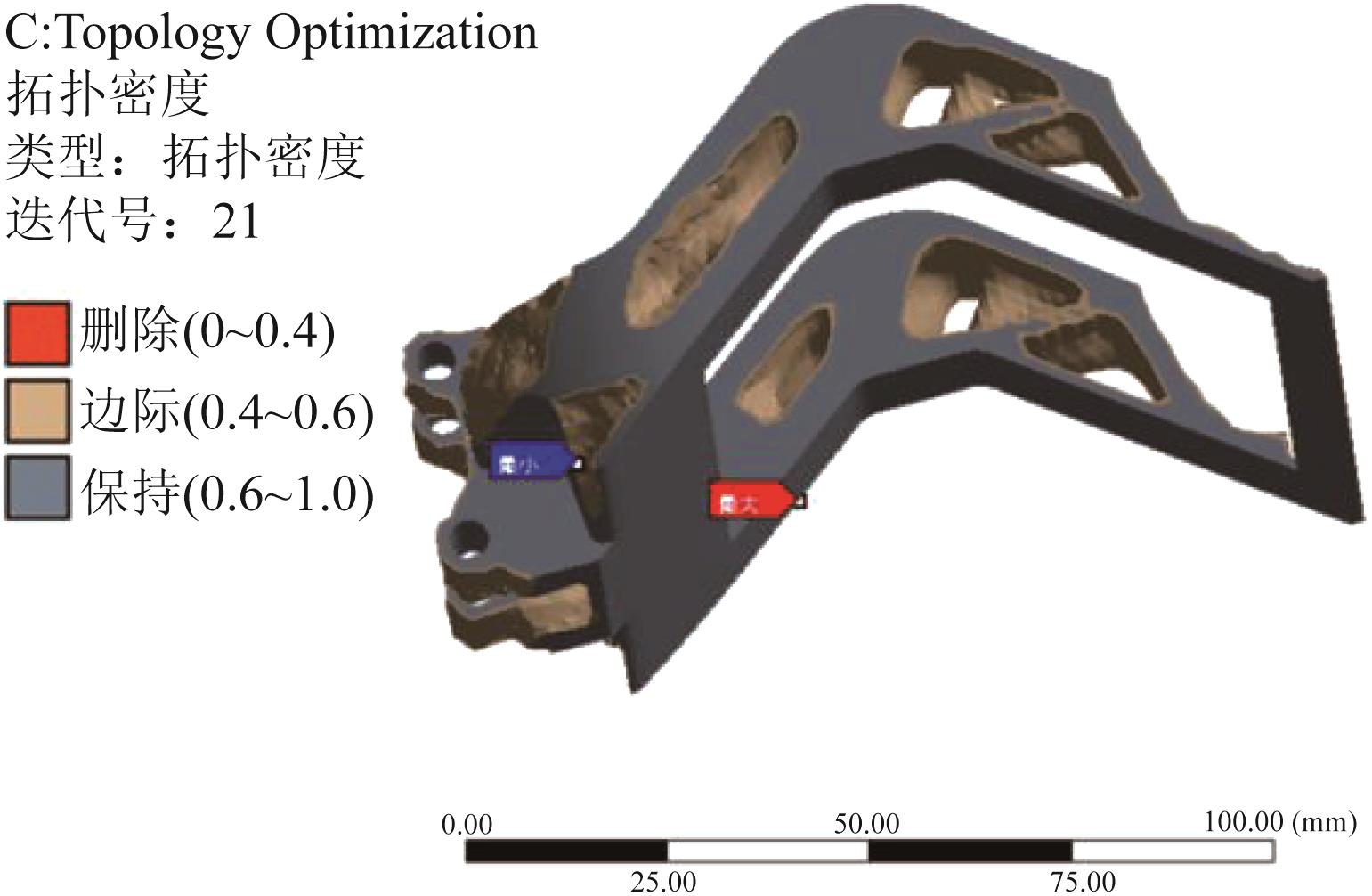
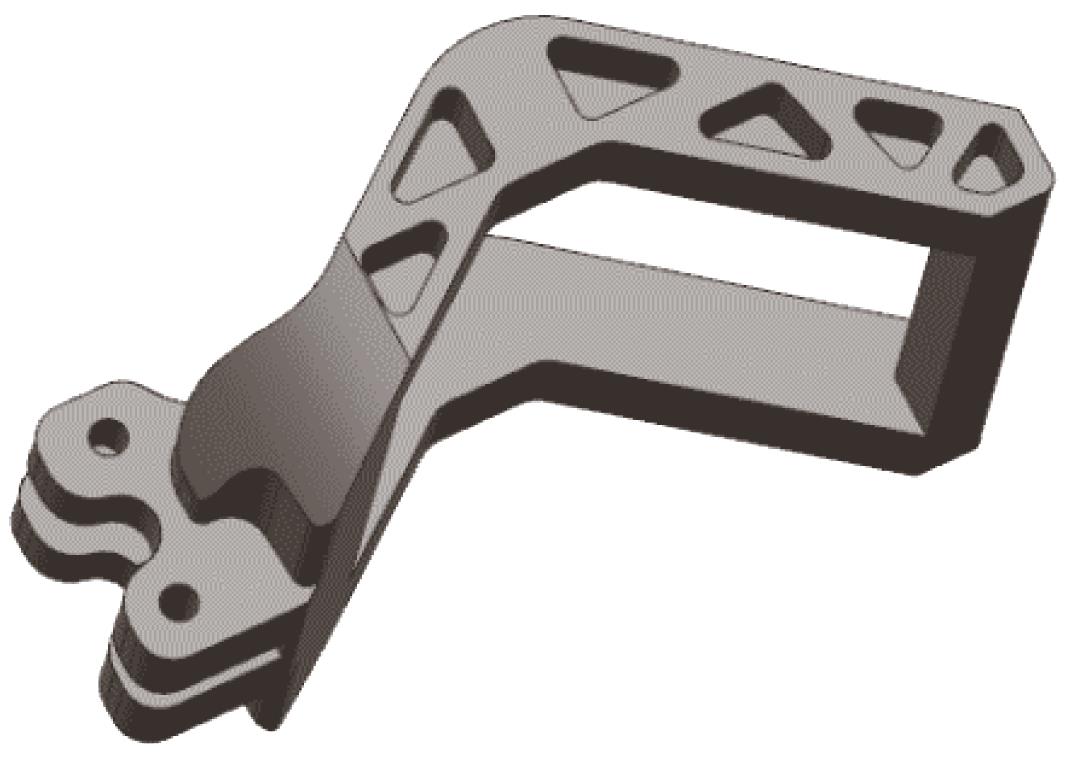
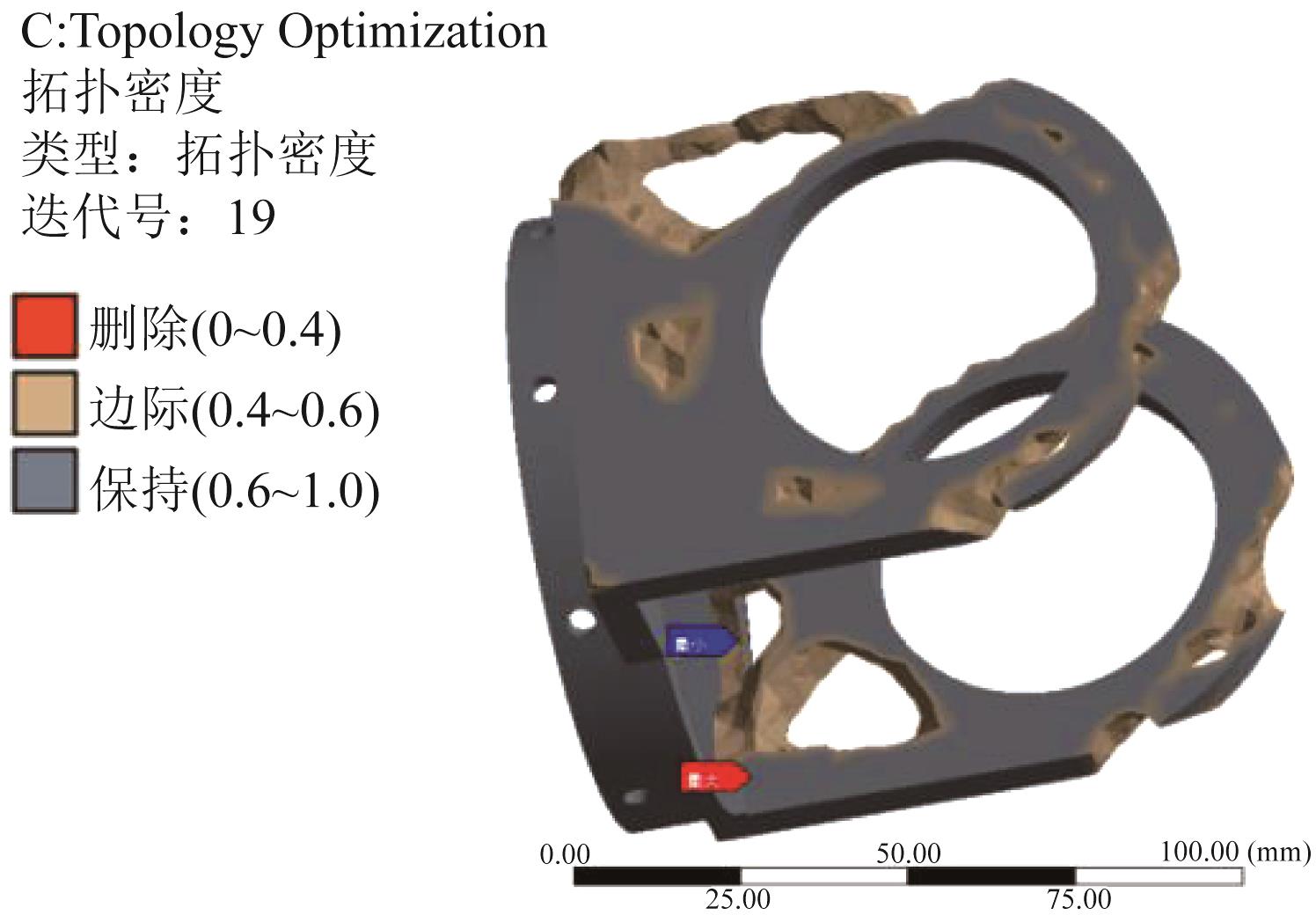
Abstract In order to achieve the structural compactness and lightweight design of pole-climbing robots, and overcome the difficulty of vertical pole movement, the weight reduction can be realized by reducing the thickness of parts. However, it can cause local stress concentration, resulting in insufficient stiffness of robot structure. Therefore, starting from the morphology of inchworms, the SIMP (solid isotropic material with penalization) variable density topology optimization design was carried out for the main structure of the pole-climbing robot, realizing the lightweight design of the robot while ensuring its overall performance. Firstly, the main components such as the gripper and T-joint of the pole-climbing robot were selected as the objects, and three motion gaits were dynamically simulated by ADAMS simulation software to simulate the load changes caused by the three motion gaits under extreme working conditions. Then, the boundary conditions were set based on information such as extreme working condition loads. The Topology Optimization module in ANSYS Workbench software was used to perform SIMP variable density topology optimization on the pole-climbing robot to remove the redundant materials that were slightly affected by loads from the robot structure. The optimized robot model was reconstructed and compared with before optimization. The results showed that while the overall weight of the pole-climbing robot was reduced by 7.6% (from 13.60 kg to 12.57 kg), the comprehensive performance of the gripper and T-joint with larger force was improved. The experimental results of energy consumption test showed that the operating energy consumption of the optimized pole-climbing robot decreased by 7.0% compared with before optimization. The proposed SIMP variable density topology optimization method has a high reference value in the structural design of biomimetic pole-climbing robots.
|
|
Received: 10 January 2023
Published: 06 July 2023
|
|
|
|
Corresponding Authors:
Binrui WANG
E-mail: zhengxiaofei.xyz@126.com;wangbrpaper@163.com
|
基于SIMP方法的爬杆机器人结构优化与分析
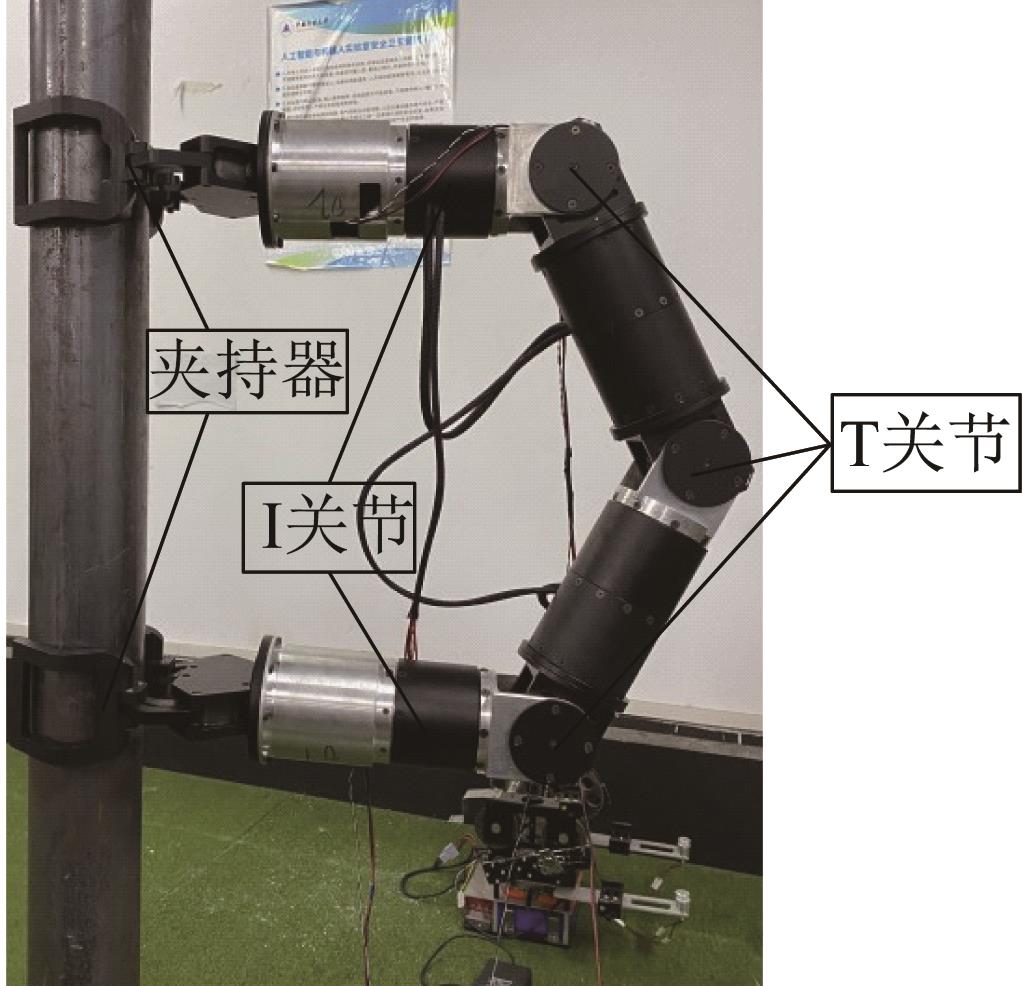
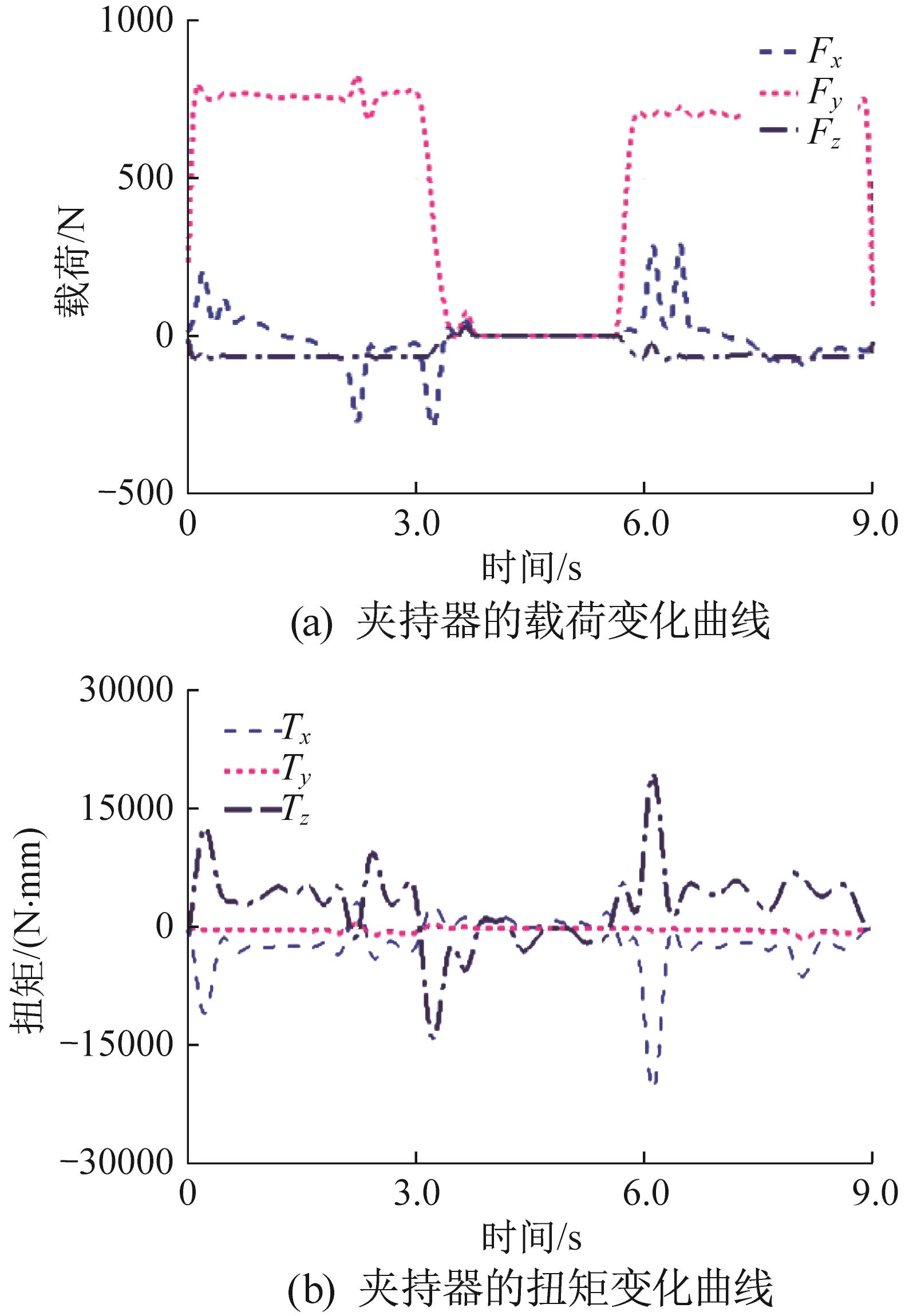
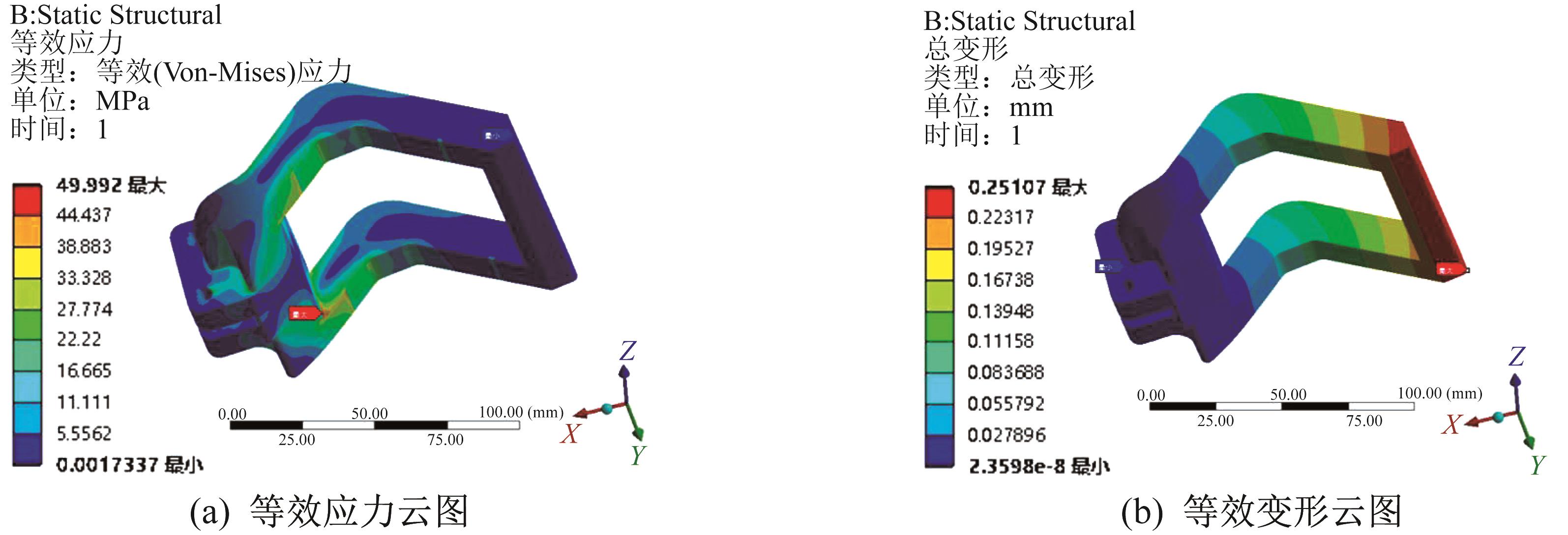
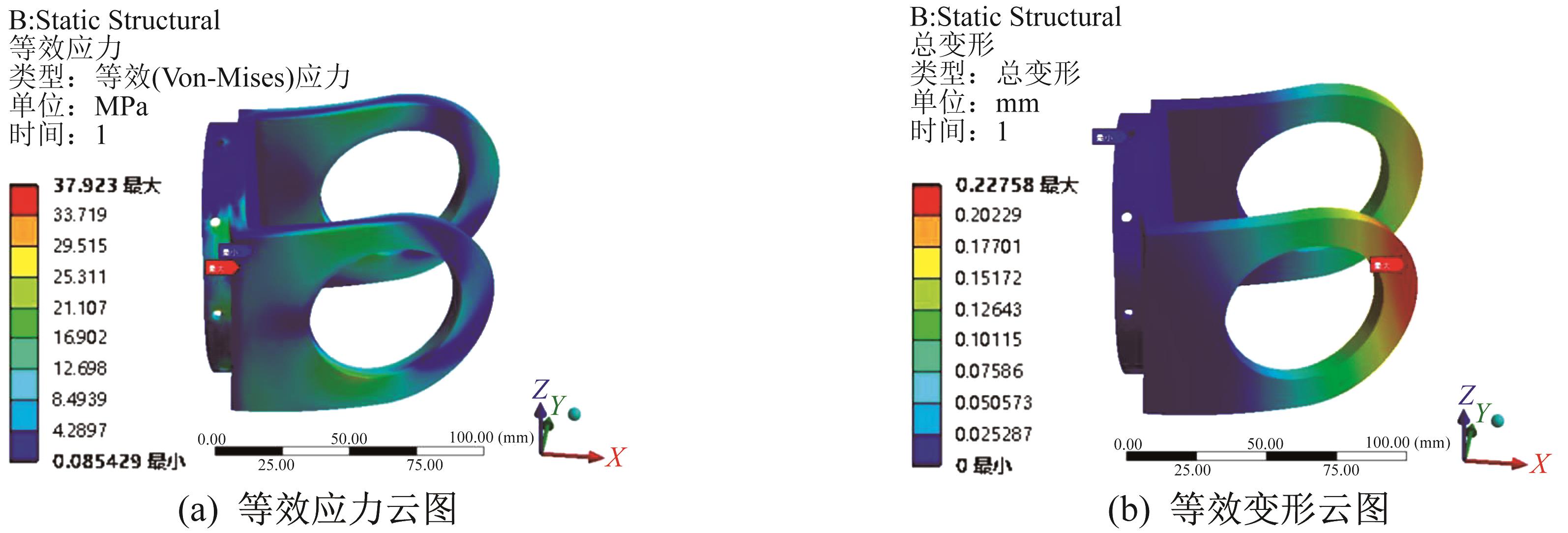
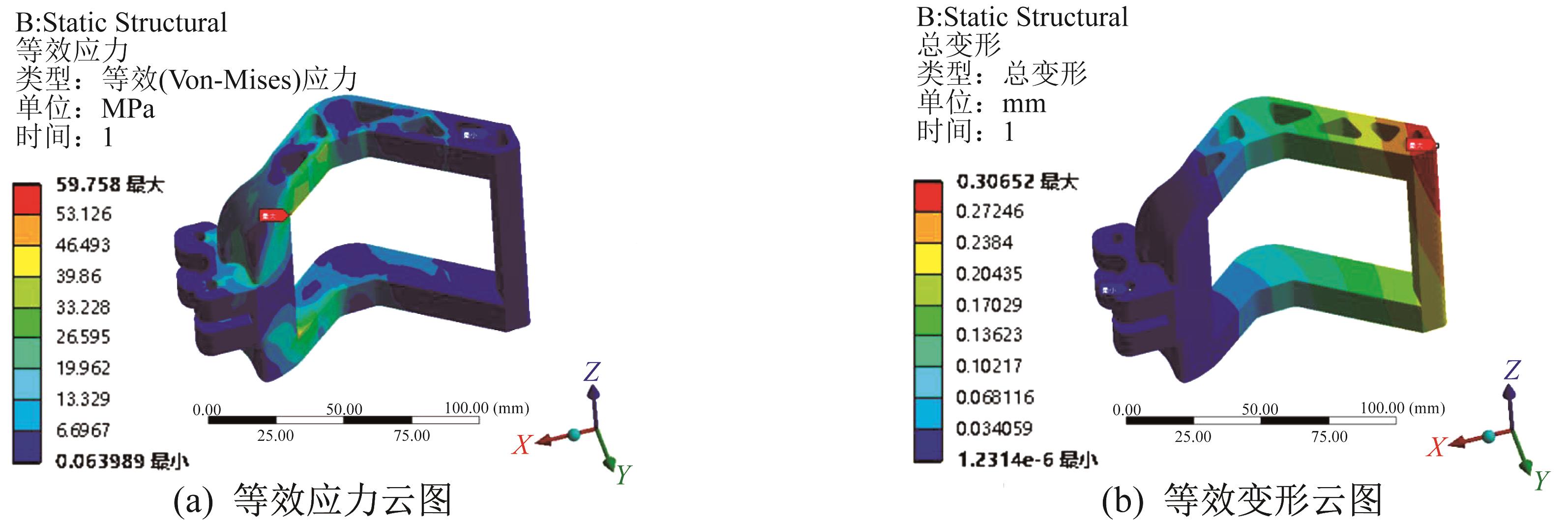
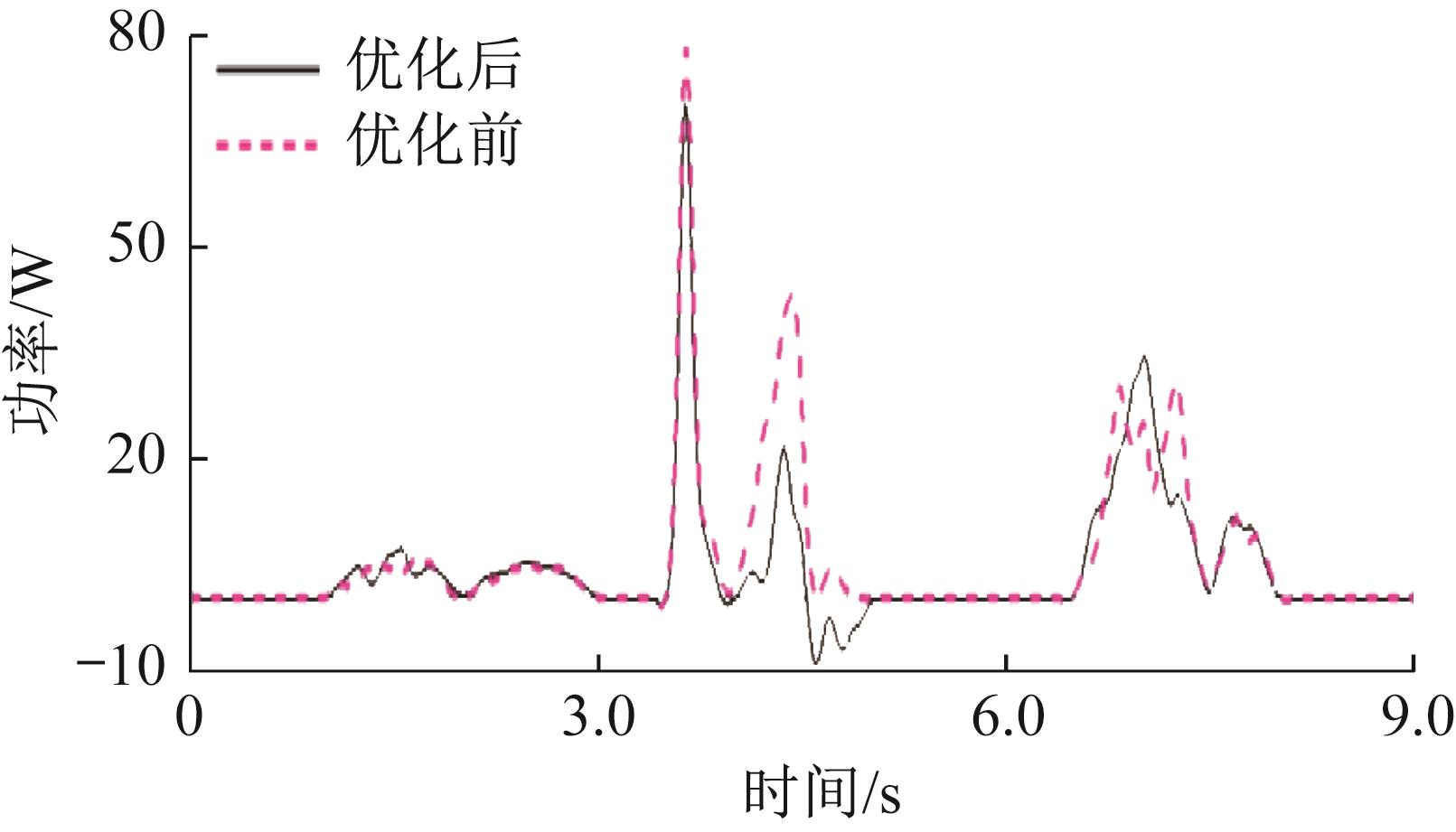
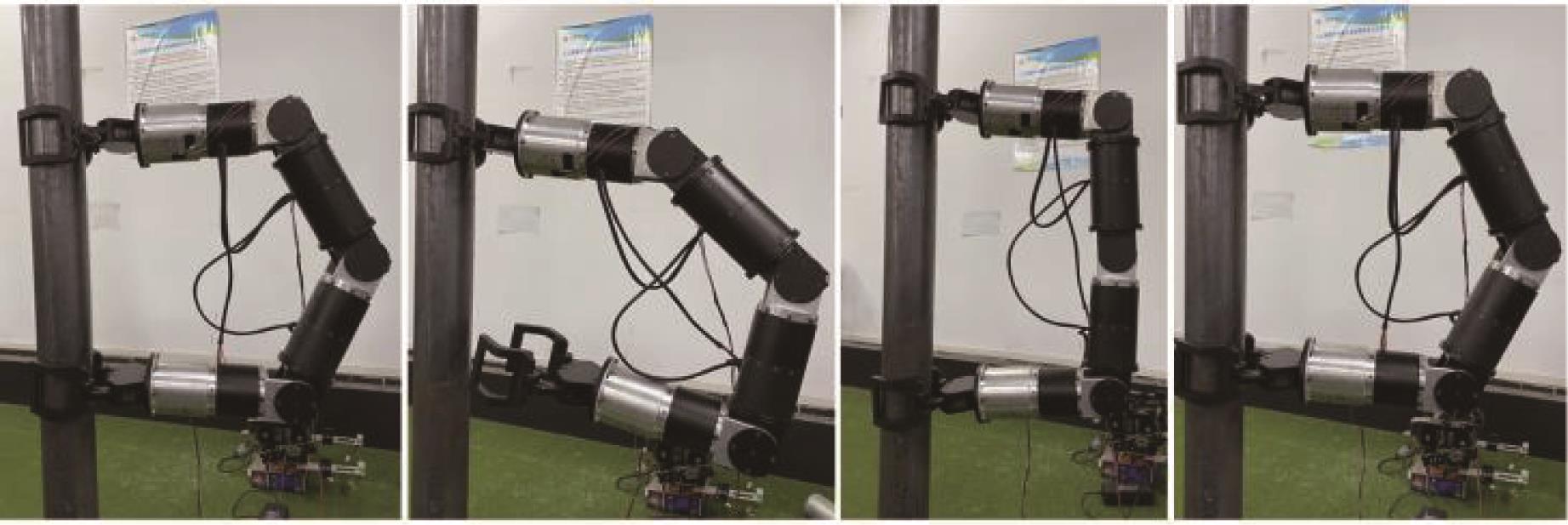
为了实现爬杆机器人的结构紧凑和轻量化设计,以及克服垂直爬杆运动困难的问题,可通过减小零件厚度的方法来进行减重,但这会造成局部应力集中,导致机器人结构刚度不足。为此,从尺蠖的形态出发,对爬杆机器人的主要结构进行SIMP(solid isotropic material with penalization,具有惩罚作用的固体各向同性材料)变密度拓扑优化设计,在保证机器人整体性能的基础上实现轻量化设计。首先,选取爬杆机器人的夹持器与T关节等主要部件为对象,通过ADAMS仿真软件对3种运动步态进行动态仿真,模拟了在极限工况下3种运动步态引起的载荷变化。然后,根据极限工况载荷等信息设置边界条件,通过ANSYS Workbench软件中的Topology Optimization模块对爬杆机器人进行SIMP变密度拓扑优化,去除机器人结构中受载荷影响微小的冗余材料,对优化后的机器人模型进行重构并与优化前对比。结果表明,在爬杆机器人整机质量减小了7.6%(由13.60 kg减小为12.57 kg)的同时,受力较大的夹持器和T关节的综合性能有所提高。能耗测试实验结果表明,优化后爬杆机器人的运行能耗比优化前降低了7.0%。所提出的SIMP变密度拓扑优化方法在仿生爬杆机器人的结构设计中具有较高的参考价值。
关键词:
机器人,
运动步态,
结构分析,
拓扑优化,
变密度
|
|
| [1] |
VERTUT J, LIEGEOIS A. General design criteria for manipulators[J]. Mechanism and Machine Theory, 1981, 16(1): 65-70.
|
|
|
| [2] |
POVSE B, HADDADIN S, BELDER R, et al. A tool for the evaluation of human lower arm injury: approach, experimental validation and application to safe robotics[J]. Robotica, 2016, 34(11): 2499-2515.
|
|
|
| [3] |
杨姝.复杂机械结构拓扑优化若干问题研究[D].大连:大连理工大学,2007:1-3.
YANG S. Study on topology optimization of complex mechanics structure[D]. Dalian: Dalian University of Technology, 2007: 1-3.
|
|
|
| [4] |
姚屏,林源,汤勇,等.结构拓扑优化方法及其机器人轻量化应用现状及发展[J].机电工程技术,2018,47(11):117-122. doi:10.3969/j.issn.1009-9492.2018.11.034
YAO P, LIN Y, TANG Y, et al. Current situation and improving trends of structural topology optimization method and the corresponding application in robot light-weight design[J]. Mechanical & Electrical Engineering Technology, 2018, 47(11): 117-122.
doi: 10.3969/j.issn.1009-9492.2018.11.034
|
|
|
| [5] |
赖欣,师靖远,彭天宇,等.爬壁机器人变密度拓扑优化吸附结构研究[J].机械科学与技术,2021,40(6):821-827. doi:10.13433/j.cnki.1003-8728.20200336
LAI X, SHI J Y, PENG T Y, et al. Research on adsorption structure of wall climbing robot with variable density topology optimization[J]. Mechanical Science and Technology for Aerospace Engineering, 2021, 40(6): 821-827.
doi: 10.13433/j.cnki.1003-8728.20200336
|
|
|
| [6] |
TRAN T H T, NGUYEN D S, VO N T, et al. Design of Delta robot arm based on topology optimization and generative design method[C]//2020 5th International Conference on Green Technology and Sustainable Development (GTSD), Ho Chi Minh City, Nov. 27-28, 2020.
|
|
|
| [7] |
CHU X Y, XU H H, SHAO G F, et al. Multi-objective topology optimization for industrial robot[C]//2016 IEEE International Conference on Information and Automation (ICIA), Ningbo, Aug. 1-3, 2016.
|
|
|
| [8] |
黄永平,郭秋明.基于拓扑优化的起重机转台的轻量化设计[J].机电工程技术,2022,51(10):211-214. doi:10.3969/j.issn.1009-9492.2022.10.051
HUANG Y P, GUO Q M. Lightweight design of the crane turntable based on topology optimazation[J]. Mechanical & Electrical Engineering Technology, 2022, 51(10): 211-214.
doi: 10.3969/j.issn.1009-9492.2022.10.051
|
|
|
| [9] |
何健,何猛,夏凉,等.基于双向渐进结构优化法的柔性机构设计[J].机械工程学报,2021,57(19):39-47. doi:10.3901/jme.2021.19.004
HE J, HE M, XIA L, et al. Design of compliant actuation mechanisms by evolutionary structural optimization method[J]. Journal of Mechanical Engineering, 2021, 57(19): 39-47.
doi: 10.3901/jme.2021.19.004
|
|
|
| [10] |
BENDSØE M P, KIKUCHI N. Generating optimal topologies in structural design using a homogenization method[J]. Computer Methods in Applied Mechanics and Engineering, 1988, 71(2): 197-224.
|
|
|
| [11] |
BENDSØE M P. Optimal shape design as a material distribution problem[J]. Structural Optimization, 1989, 1: 193-202.
|
|
|
| [12] |
滕兆春,衡亚洲,刘露.非均匀 Winkler 弹性地基上变厚度矩形板自由振动的 DTM 求解[J].计算力学学报,2018,35(2):216-223. doi:10.7511/jslx20170217002
TENG Z C, HENG Y Z, LIU L. Free vibration analysis for rectangular plates with variable thickness resting on a non-uniform Winkler elastic foundation by DTM[J]. Chinese Journal of Computational Mechanics, 2018, 35(2): 216-223.
doi: 10.7511/jslx20170217002
|
|
|
| [13] |
LIU T, LI B, WANG S, et al. Eigenvalue topology optimization of structures using a parameterized level set method[J]. Structural and Multidisciplinary Optimization, 2014, 50: 573-591.
|
|
|
| [14] |
LING Z, ZHANG D, LIU C, et al. Topology optimization of a constrained layer damping plate coupled with an acoustical cavity[J]. International Journal of Acoustics and Vibration, 2016, 21(4): 394-405.
|
|
|
| [15] |
BENDSØE M P, SIGMUND O. Topology optimization: theory, methods, and applications[M]. Berlin: Springer-Verlag, 2003: 1-20.
|
|
|
| [16] |
STOLPE M, SVANBERG K. An alternative interpolation scheme for minimum compliance topology optimization[J]. Structural and Multidisciplinary Optimization, 2001, 22(2): 116-124.
|
|
|
| [17] |
罗震,陈立平,黄玉盈,等.连续体结构的拓扑优化设计[J].力学进展,2004,34(4):463-476. doi:10.6052/1000-0992-2004-4-J2003-111
LUO Z, CHEN L P, HUANG Y Y, et al. Topological optimization design for continuum structures[J]. Advances in Mechanics, 2004, 34(4): 463-476.
doi: 10.6052/1000-0992-2004-4-J2003-111
|
|
|
| [18] |
管贻生,邓休,李怀珠,等.工业机器人的结构分析与优化[J].华南理工大学学报(自然科学版),2013,41(9):126-131. doi:10.3969/j.issn.1000-565X.2013.09.021
GUAN Y S, DENG X, LI H Z, et al. Structural analysis and optimization of industrial robot[J]. Journal of South China University of Technology (Natural Science Edition), 2013, 41(9): 126-131.
doi: 10.3969/j.issn.1000-565X.2013.09.021
|
|
|
| [19] |
李帅,穆瑞芳,张壮志.基于 ANSYS Workbench 拓扑优化对止动架轻量化的研究[J].船舶工程,2016,38(7):35-39.
LI S, MU R F, ZHANG Z Z. Lightweight research of stop frame based on topological optimization of ANSYS Workbench[J]. Ship Engineering, 2016, 38(7): 35-39.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|