| Robotic and Mechanism Design |
|


|
|
|
| Structure design and motion analysis of pipeline dredging robot with diameter adjustment |
Yue LI1( ),Yunjiao DENG1,Ran AO1,Yulei HOU1(),Daxing ZENG2 ),Yunjiao DENG1,Ran AO1,Yulei HOU1(),Daxing ZENG2 |
1.School of Mechanical Engineering, Yanshan University, Qinhuangdao 066004, China
2.School of Mechanical Engineering, Dongguan Institute of Technology, Dongguan 523808, China |
|
|
|
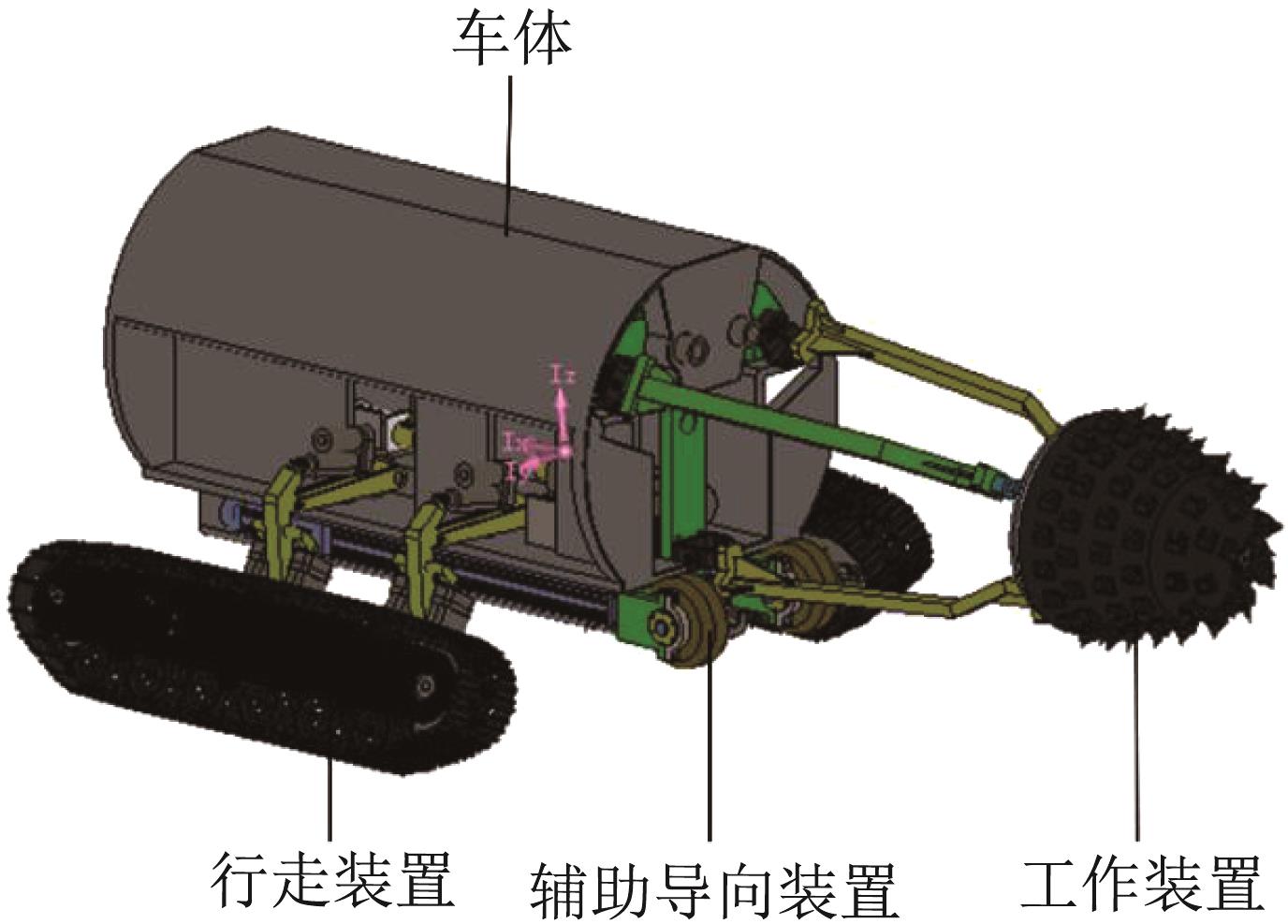
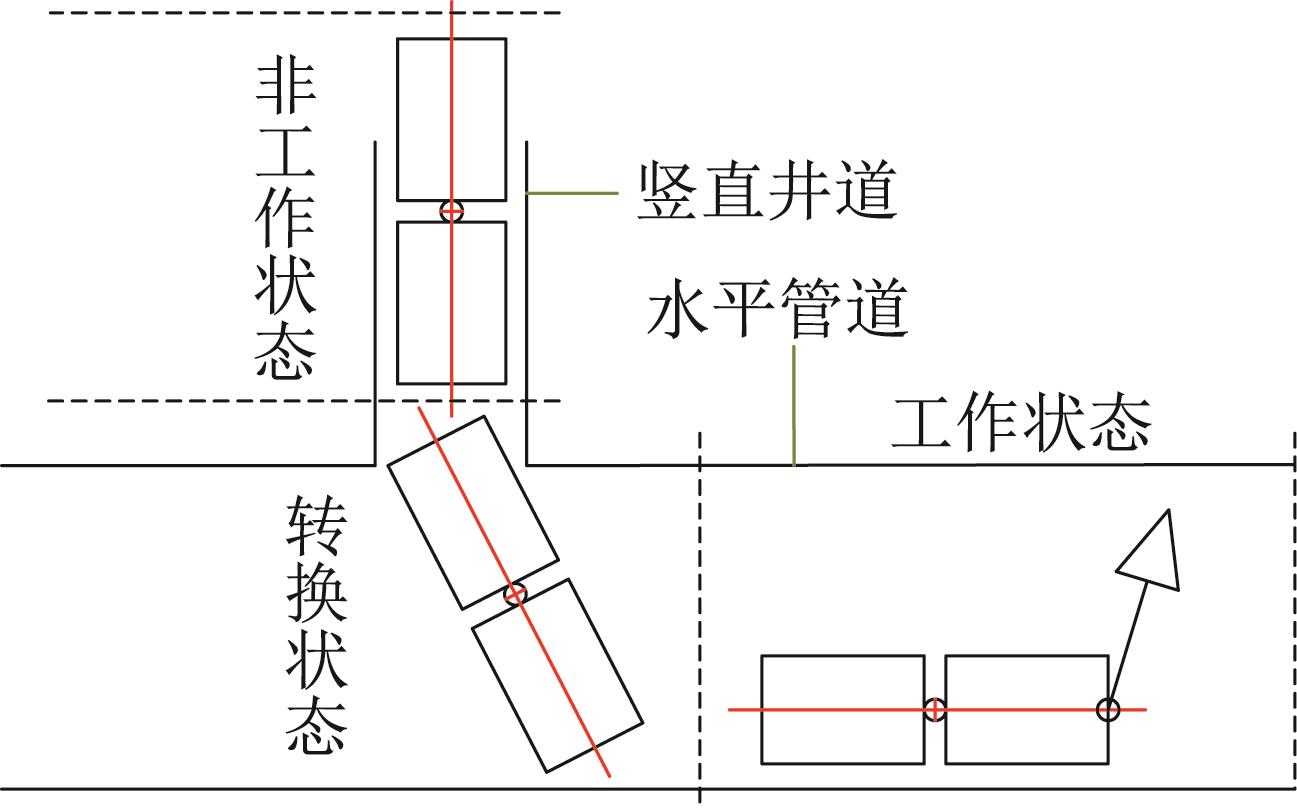
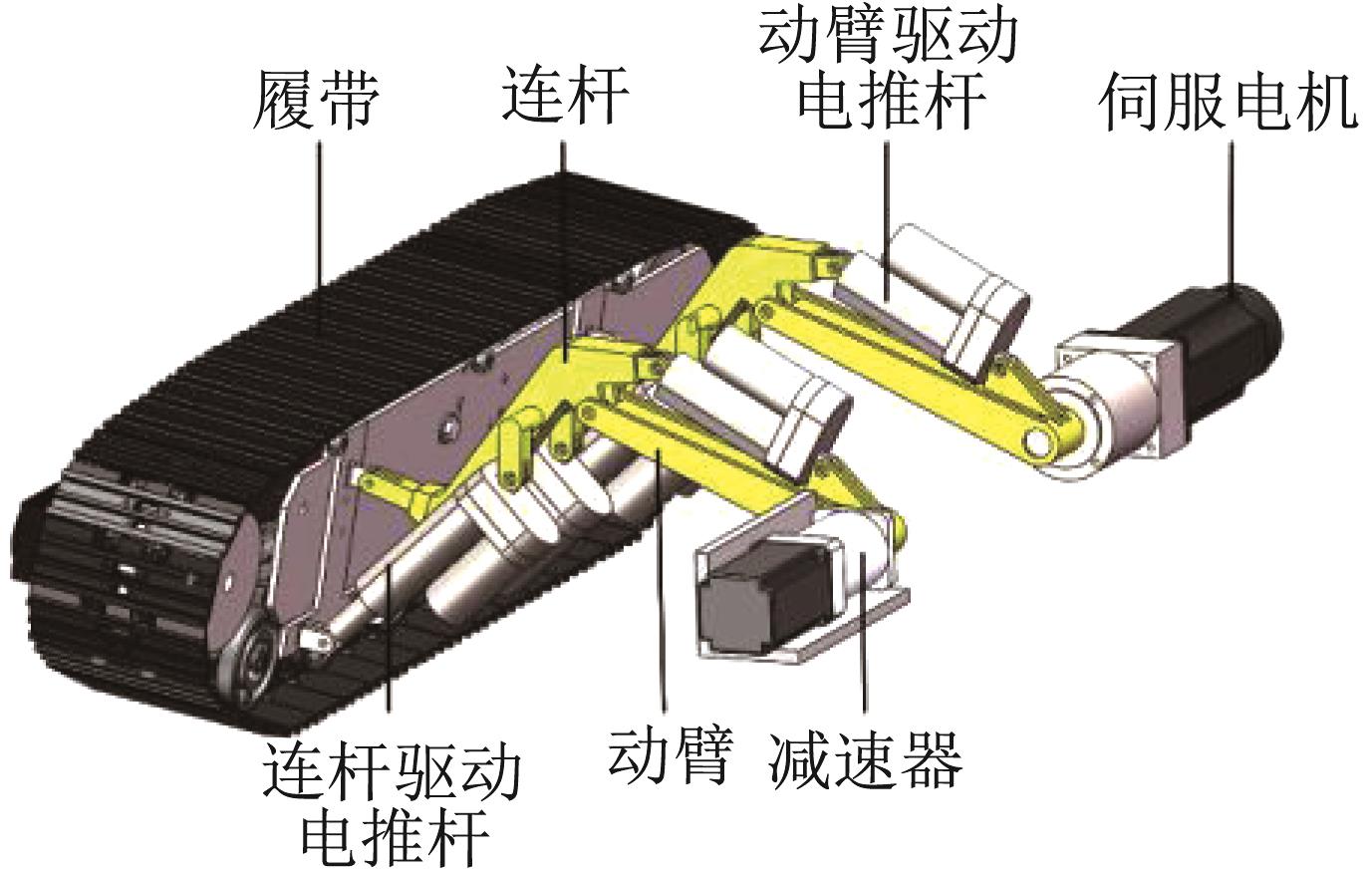
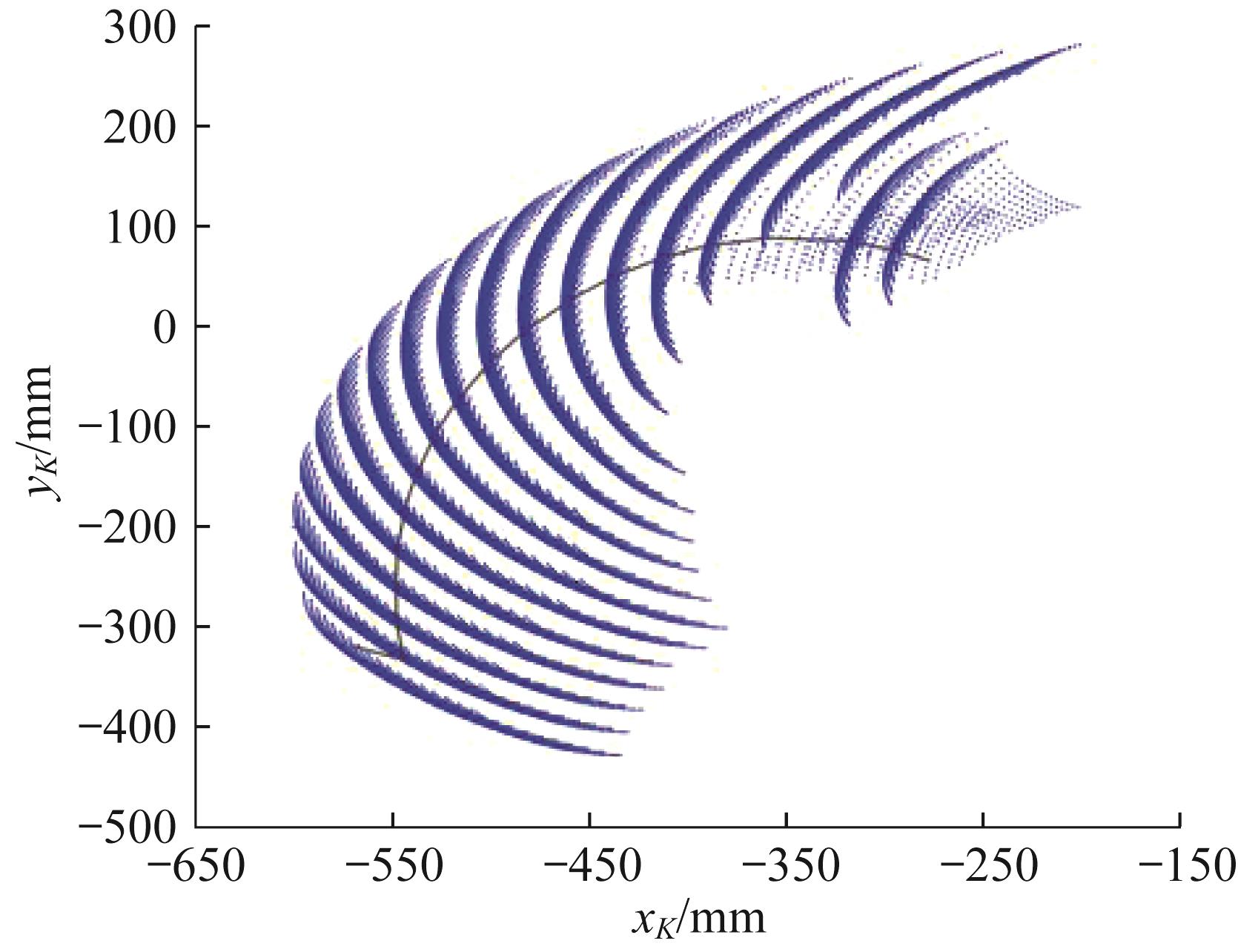
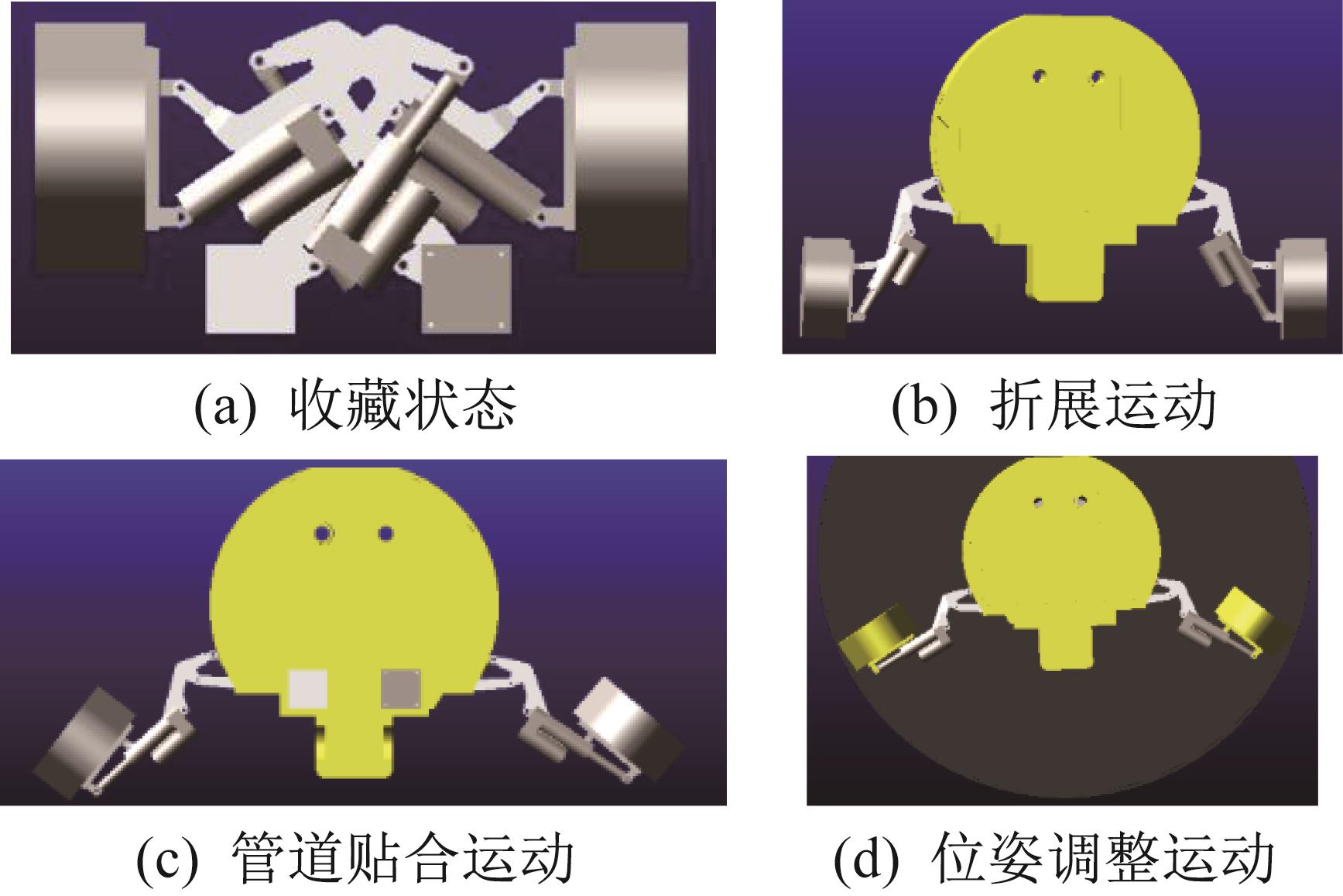
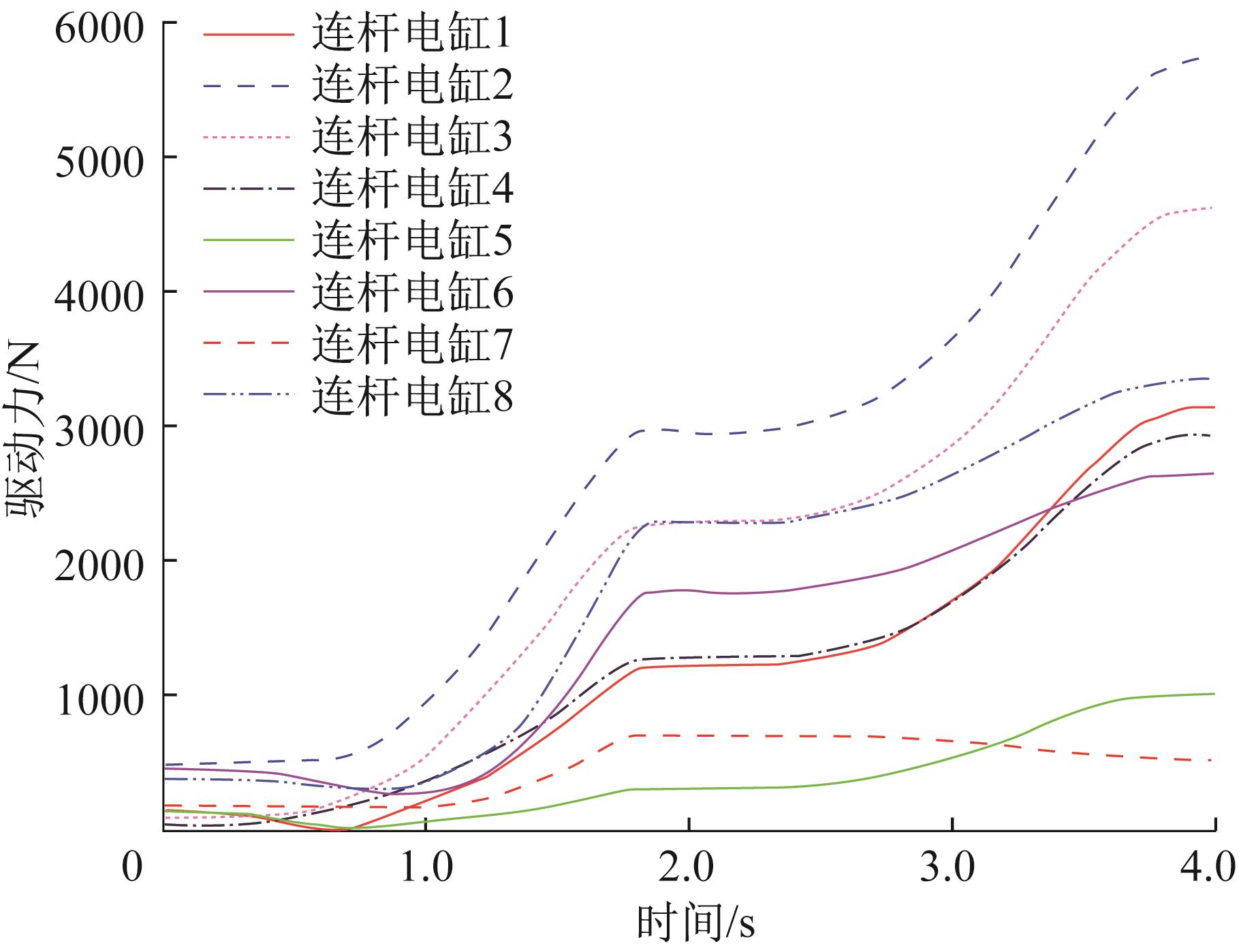
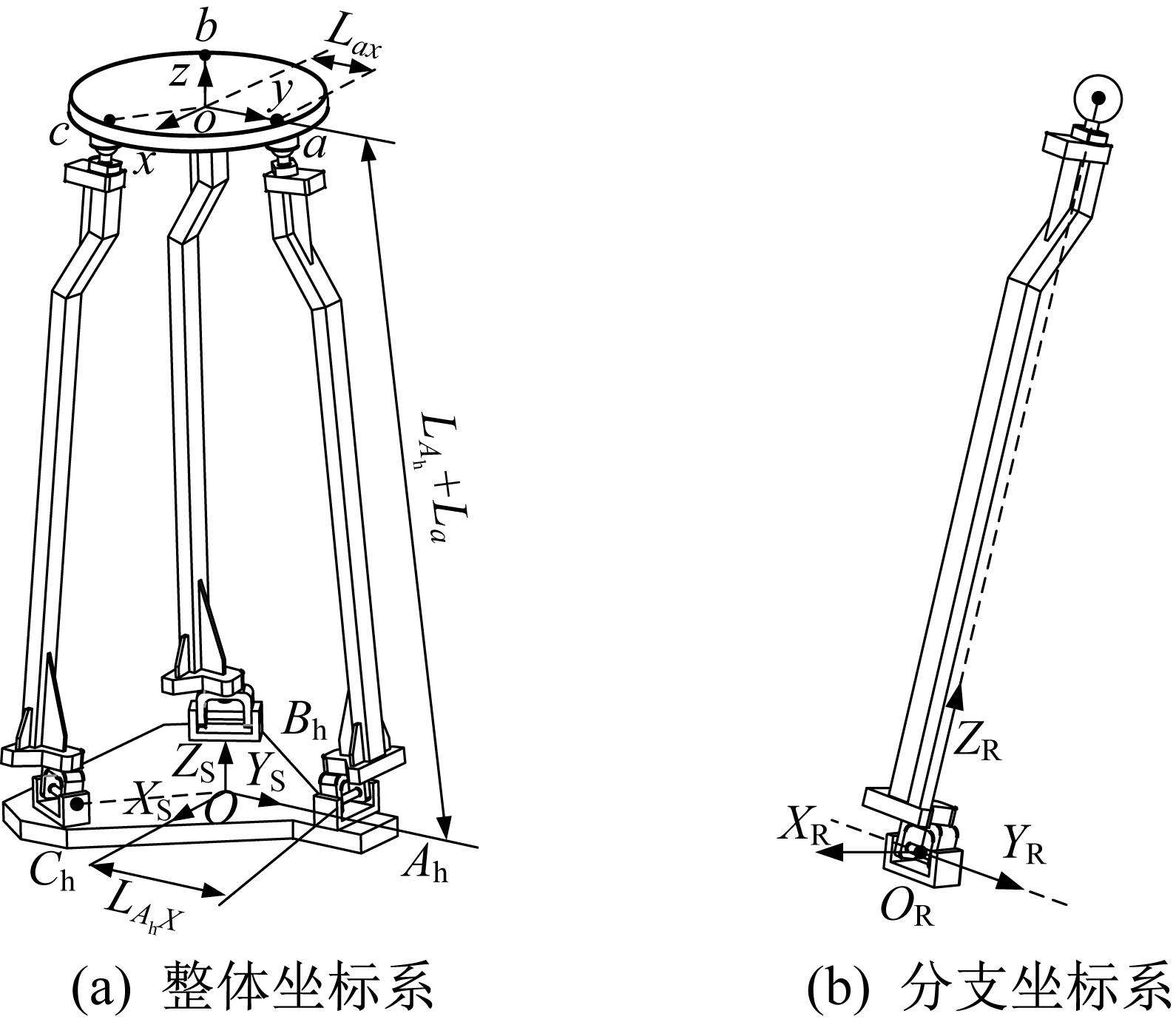
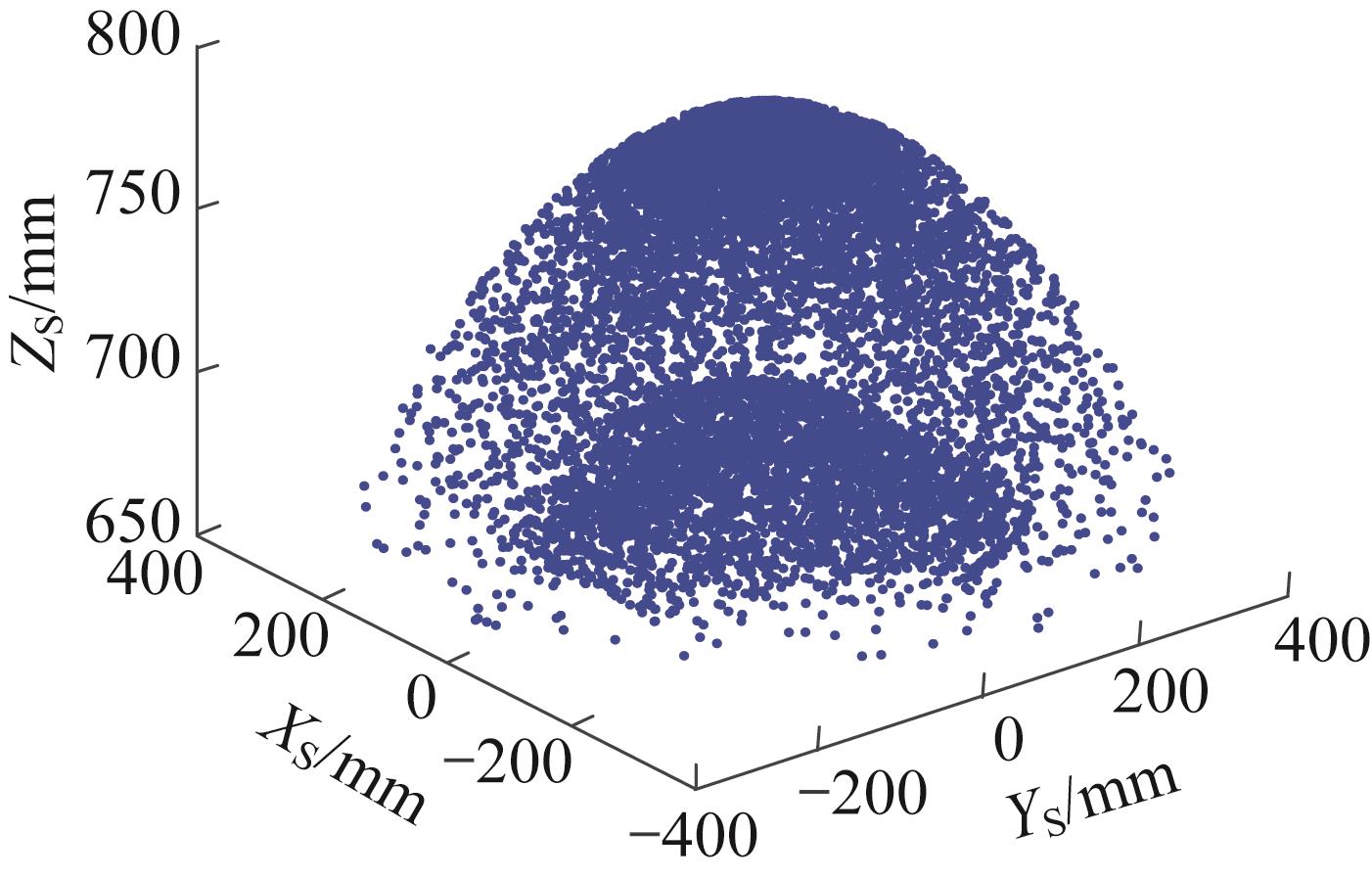
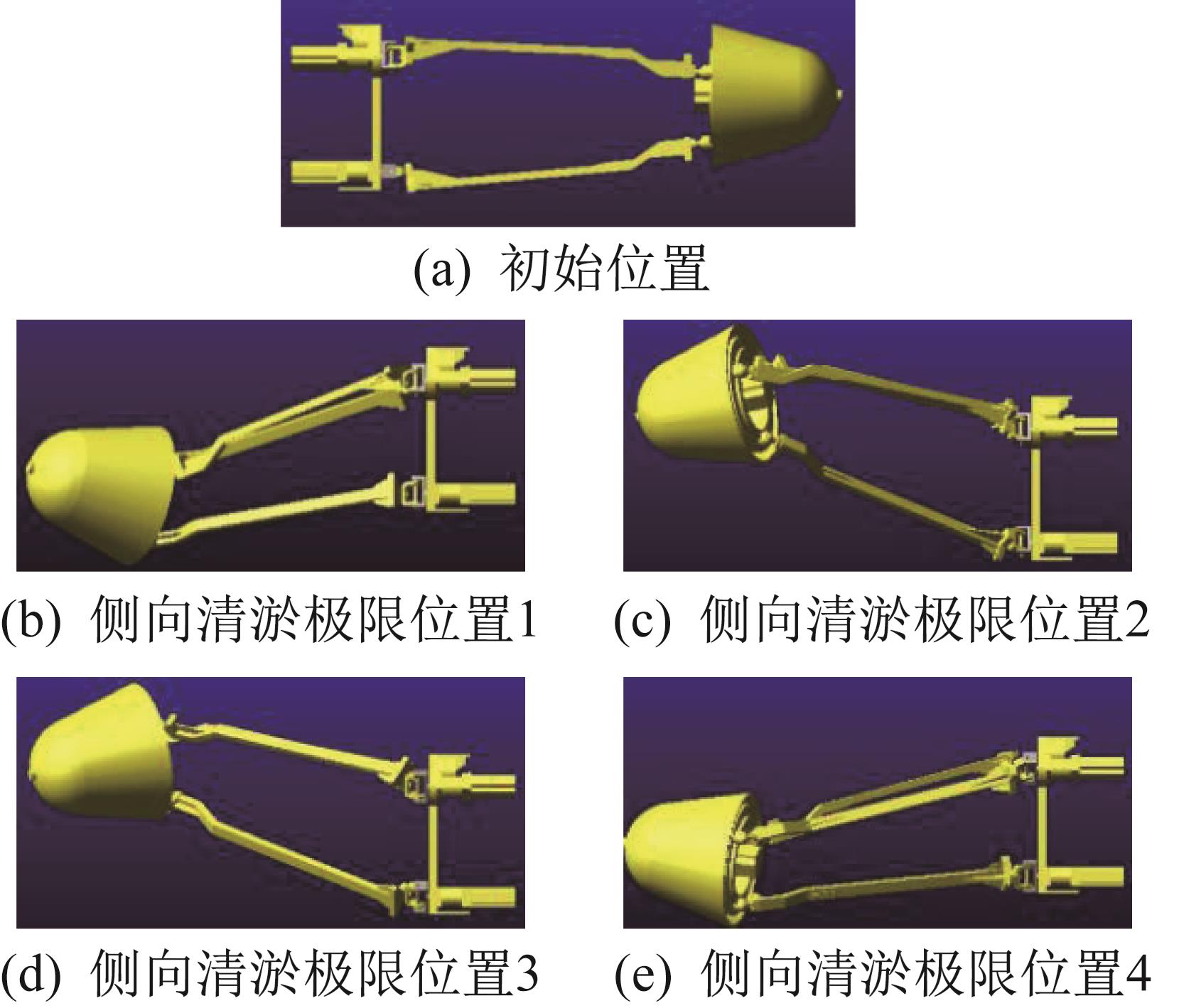
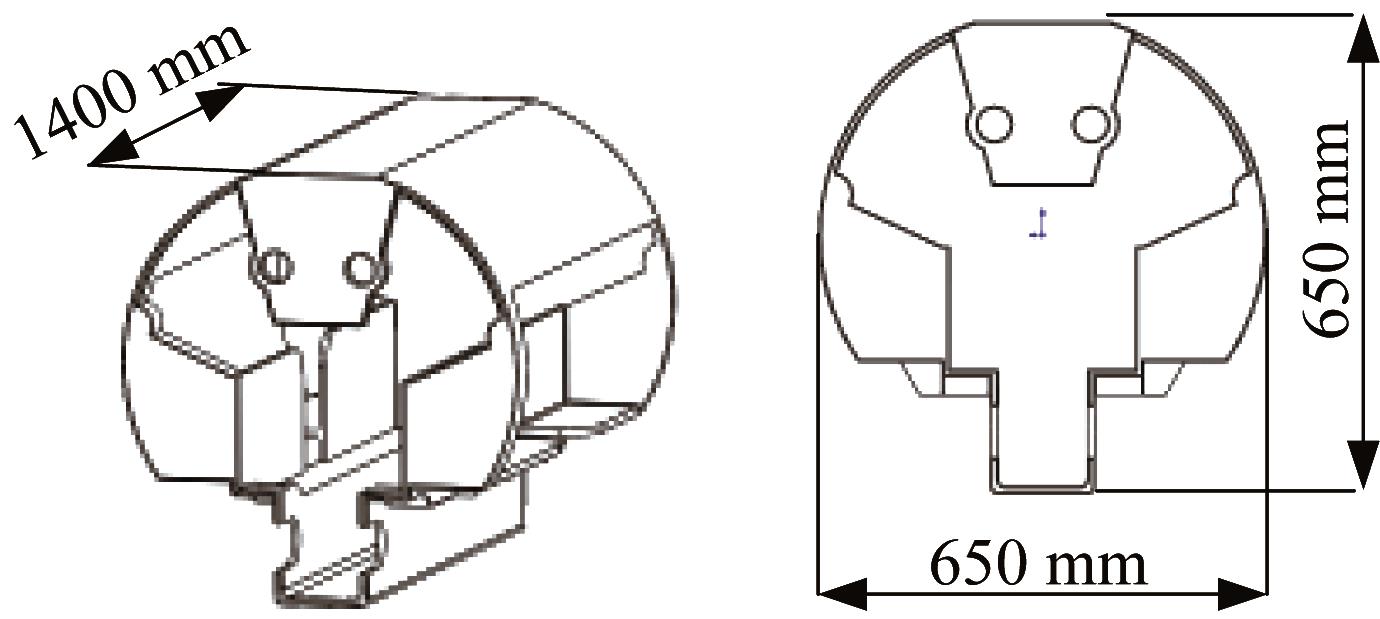
Abstract In order to achieve the dredging of urban underground pipelines with complex layout, a tracked pipeline dredging robot based on parallel mechanism was proposed. Adopting a folding and posture adjustment walking device to reduce the robot's volume, and using a working device based 3-US parallel mechanism to increase the robot's workspace; a robot workspace algorithm was written, and the working range and motion trajectory of the walking device and working device were obtained by simulation through MATLAB software; the motion states of the robot were simulated by ADAMS software, and its driving characteristic parameters were analyzed. The variation rules of driving force and driving torque of the walking device under different motion states were obtained, as well as the driving torque of the working device when transitioning between extreme positions in different directions. Simulation study showed the stability of the walking device during folding and posture adjustment, as well as the flexibility of the working device in transitioning between various dredging limit positions. The research results have guiding significance for the development and application of pipeline dredging robot with diameter adjustment.
|
|
Received: 02 September 2022
Published: 06 July 2023
|
|
|
|
Corresponding Authors:
Yulei HOU
E-mail: ysu_liyue@163.com;ylhou@ysu.edu.cn
|
可适径调整管道清淤机器人结构设计与运动分析
为了实现布局复杂的城市地下管道的清淤,提出了一种基于并联机构的履带式管道清淤机器人。采用折展调姿行走装置以减小机器人体积,采用基于3-US并联机构的工作装置以增大机器人的工作空间;编写了机器人工作空间算法,通过MATLAB软件仿真得到了行走装置和工作装置的工作范围及运动轨迹;采用ADAMS软件模拟了机器人运动状态,并对其驱动特性参数进行分析,得到了行走装置在不同运动状态下驱动力和驱动力矩的变化规律,以及工作装置在不同方向极限位置转换时的驱动力矩。仿真研究表明了行走装置折展调姿的稳定性及工作装置在各个清淤极限位置间转换的灵活性。研究结果对可适径调整管道清淤机器人的研制与应用具有指导意义。
关键词:
管道机器人,
可适径调整,
工作空间,
并联机构
|
|
| [1] |
NIAN S C, SUN H X, CHENG Y. Mechanism based on pipe cleaning apparatus of high-pressure water jet[C]// AER-Advances in Engineering Research. Paris: Atlantis Press, 2015, 21: 169-175.
|
|
|
| [2] |
陈晓鹂,李聪丽,李依璟,等.城市下水管道机器人造型设计[J].机械设计,2020,37(11):148.
CHEN X L, LI C L, LI Y J, et al. Design of robot for urban sewer pipeline[J]. Journal of Machine Design, 2020, 37(11): 148.
|
|
|
| [3] |
罗继曼,郭松涛,刘思远.管道机器人清淤装置振动稳定性研究[J].机械设计与制造,2022(1):242-246. doi:10.3969/j.issn.1001-3997.2022.01.055
LUO J M, GUO S T, LIU S Y. Study on vibration stability of pipeline robot dredging device[J]. Machinery Design & Manufacture, 2022(1): 242-246.
doi: 10.3969/j.issn.1001-3997.2022.01.055
|
|
|
| [4] |
李智强,李卫国,冯志成,等.管道机器人结构与通过性分析[J].机械传动,2021,45(6):146-152.
LI Z Q, LI W G, FENG Z C, et al. Structural and passability analysis of pipeline robot[J]. Journal of Mechanical Transmission, 2021, 45(6): 146-152.
|
|
|
| [5] |
芮宏斌,李路路,曹伟,等.轮-履-腿复合仿生机器人步态规划及越障性能分析[J].工程设计学报,2022,29(2): 133-142. doi:10.3785/j.issn.1006-754X.2022.00.031
RUI H B, LI L L, CAO W, et al. Gait planning and obstacle crossing performance analysis of wheel-walk-leg bionic robot[J]. Chinese Journal of Engineering Design, 2022, 29(2): 133-142.
doi: 10.3785/j.issn.1006-754X.2022.00.031
|
|
|
| [6] |
刘洪斌,冀楠.蠕动式管道机器人结构设计与运动特性分析[J].哈尔滨工程大学学报,2022,43(8):1169-1177. doi:10.11990/jheu.202110030
LIU H B, JI N. Structural design and motion characteristics analysis of peristaltic pipeline robots[J]. Journal of Harbin Engineering University, 2022, 43(8): 1169-1177.
doi: 10.11990/jheu.202110030
|
|
|
| [7] |
ZHAO Y T, HAN B L, LUO Q S, et al. Design and implementation of four-link robot crawler with variable structure[C]//IOP Conference Series: Materials Science and Engineering, 3rd International Conference on Automation, Control and Robotics Engineering. Chengdu, Jul. 19-22, 2018.
|
|
|
| [8] |
陈宗尧,颜国正,王坤东,等.关节履带式管道检测机器人越障性能优化[J]上海交通大学学报,2011,45(7): 1017-1020.
CHEN Z Y, YAN G Z, WANG K D, et al. The performance optimization of the articulated-tracked pipe-inspected robot for obstacle negotiation[J]. Journal of Shanghai Jiaotong University, 2011, 45 (7): 1017-1020.
|
|
|
| [9] |
张月,董雷,宦荣华,等.风电叶片管道内窥履带机器人的设计与运动分析[J].中国机械工程,2021,32(15): 1884-1889. doi:10.3969/j.issn.1004-132X.2021.15.015
ZHANG Y, DONG L, HUAN R H, et al. Design and kinematic analysis of crawler-type pipeline endoscope robots for wind turbine blades[J]. China Mechanical Engineering, 2021, 32 (15): 1884-1889.
doi: 10.3969/j.issn.1004-132X.2021.15.015
|
|
|
| [10] |
闫宏伟,焦彪彪,马建强,等.一种管道机器人的自适应主动螺旋式驱动机理分析[J].中国机械工程,2018,29(1): 21-29. doi:10.3969/j.issn.1004-132X.2018.01.004
YAN H W, JIAO B B, MA J Q, et al. Adaptive active screw driving mechanism analysis for pipeline robots[J]. China Mechanical Engineering, 2018, 29 (1): 21-29.
doi: 10.3969/j.issn.1004-132X.2018.01.004
|
|
|
| [11] |
ZHANG H, ZGAO L N, DAI X F. Hardware design of a pipeline inspection robot[J]. New Trends in Mechatronics and Materials Engineering, 2012, 151: 116-120.
|
|
|
| [12] |
NIAN S C, SUN H X, YANG W. Based on the three-dimensional pipeline network of a new type of wheel pipeline robot structure design and simulation[C]// International Conference on Informatics, Control and Automation. Lancaster: Destech Publications, 2015: 36-43.
|
|
|
| [13] |
王伟,赵少魁.管道机器人的研究现状及其展望[J].兵工自动化,2019,38(12):24-30.
WANG W, ZHAO S K. Development situation and key technologies of the pipeline robot[J]. Ordnance Industry Automation, 2019, 38 (12): 24-30.
|
|
|
| [14] |
ALIREZA A, YOSHINORI K, MASUMI I. A laser scanner for landmark detection with the sewer inspection Robot KANTARO[C]. IEEE/SMC International Conference on System of Systems Engineering. Los Angeles, Apr. 24-26, 2006.
|
|
|
| [15] |
刘大伟,刘佳佳.面向管道机器人的非对称惯性驱动系统及其动力学特性[J].中国机械工程,2020,31(18): 2189-2195,2205. doi:10.3969/j.issn.1004-132X.2020.18.006
LIU D W, LIU J J. Asymmetric inertia driving system for in-pipe robots and its dynamics characteristics[J]. China Mechanical Engineering, 2020, 31 (18): 2189-2195, 2205.
doi: 10.3969/j.issn.1004-132X.2020.18.006
|
|
|
| [16] |
梁亮,江华,唐勇,等.一种内螺旋管道机器人[J].中国机械工程,2014,25(24):3289-3294. doi:10.3969/j.issn.1004-132X.2014.24.005
LIANG L, JIANG H, TANG Y, et al. An inner spiral in-pipe robot[J]. China Mechanical Engineering, 2014, 25(24): 3289-3294.
doi: 10.3969/j.issn.1004-132X.2014.24.005
|
|
|
| [17] |
侯雨雷,敖然,王雷,等.可适径调整的并联式管道清淤机器人:CN202110291823.4[P].2021-05-28.
HOU Y L, AO R, WANG L, et al. Parallel pipe dredging robot with diameter adjustment: CN202110291823.4[P]. 2021-05-28.
|
|
|
| [18] |
LYU S N, ZLATANOV D, ZOPPI M, et al. Bundle folding type Ⅲ Bricard linkages[J]. Mechanism and Machine Theory, 2020, 144: 103663.
|
|
|
| [19] |
张云娇,魏国武,戴建生.基于旋量理论的3-US并联机构运动学分析[J].机械设计与研究,2014,30(2):8-11.
ZHANG Y J, WEI G W, DAI J S. Kinematic analysis of a 3-US parallel mechanism using screw theory[J]. Machine Design & Research, 2014, 30 (2): 8-11.
|
|
|
| [20] |
单彦霞,付冰双,李若松,等.基于并联机构的双重驱动管道机器人设计与研究[J].机械设计,2020,37(6):17-23.
SHAN Y X, FU B S, LI R S, et al. Design and research of the dual-actuated in-pipe robot based on the parallel mechanism[J]. Journal of Machine Design, 2020, 37(6): 17-23.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|