| Robotic and Mechanism Design |
|


|
|
|
| Design and optimization of pendulous magnetic adsorption mechanism for wall-climbing robots |
Dong ZHANG( ),Pei YANG(),Zhexuan HUANG,Lingyu SUN,Minglu ZHANG ),Pei YANG(),Zhexuan HUANG,Lingyu SUN,Minglu ZHANG |
| School of Mechanical Engineering, Hebei University of Technology, Tianjin 300130, China |
|
|
|
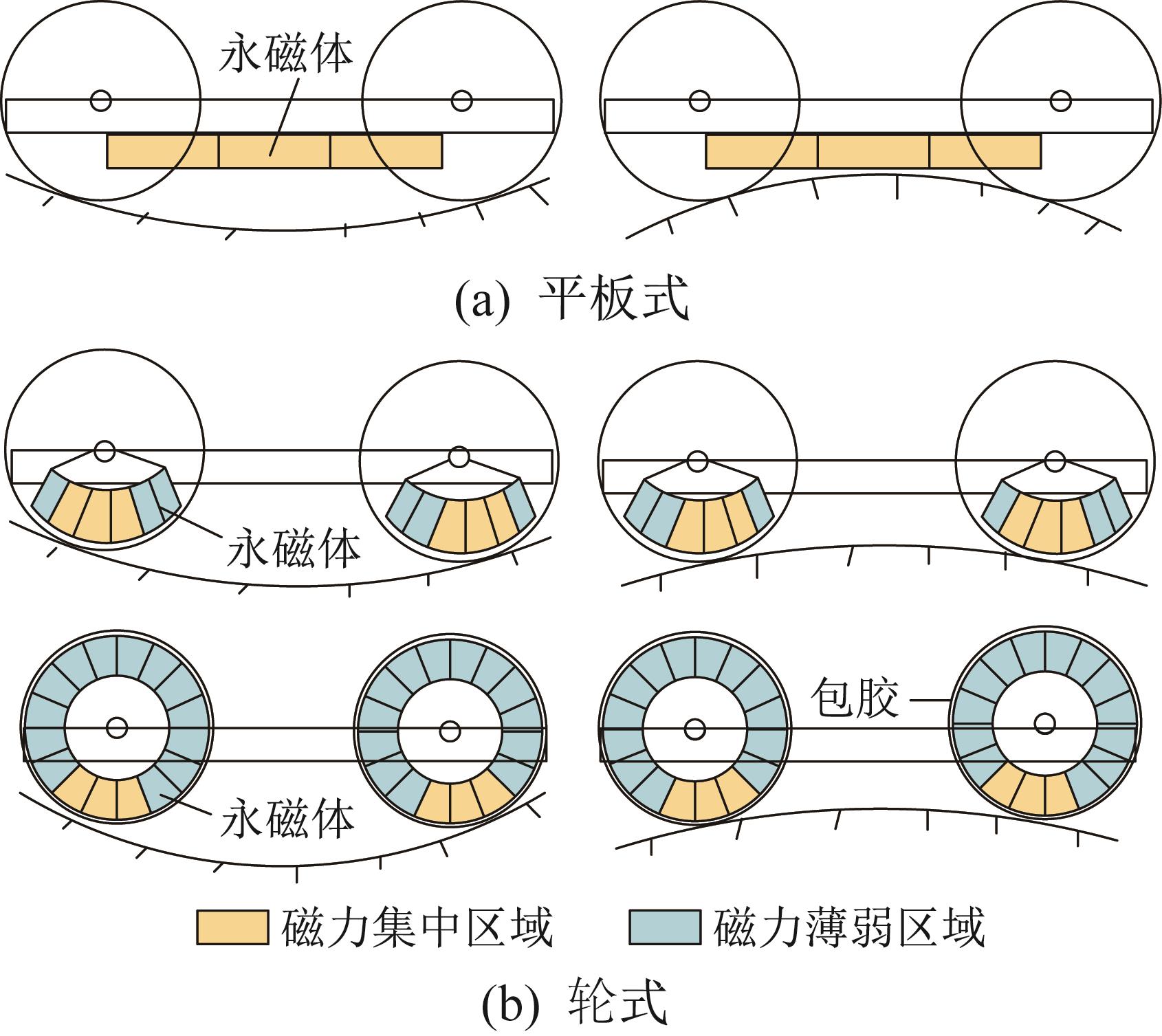
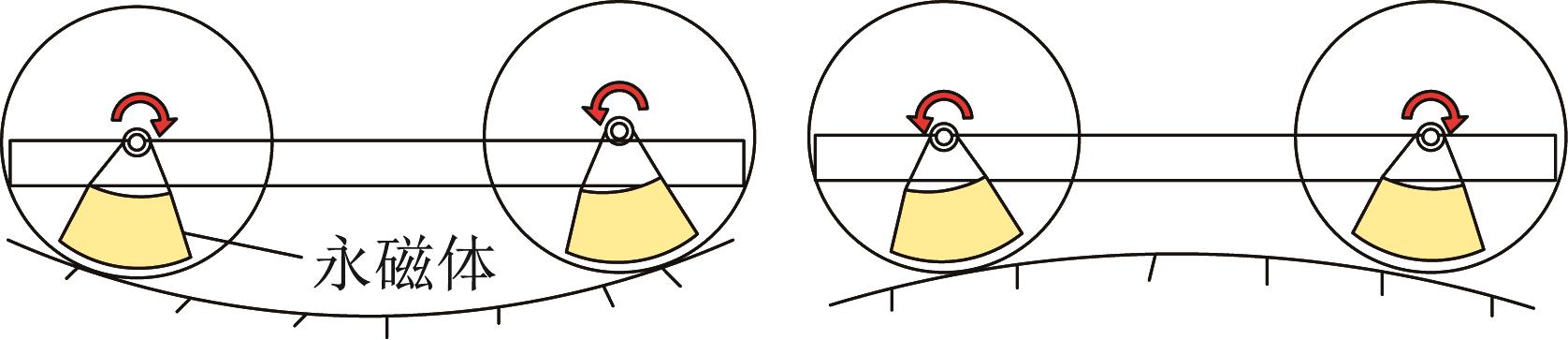
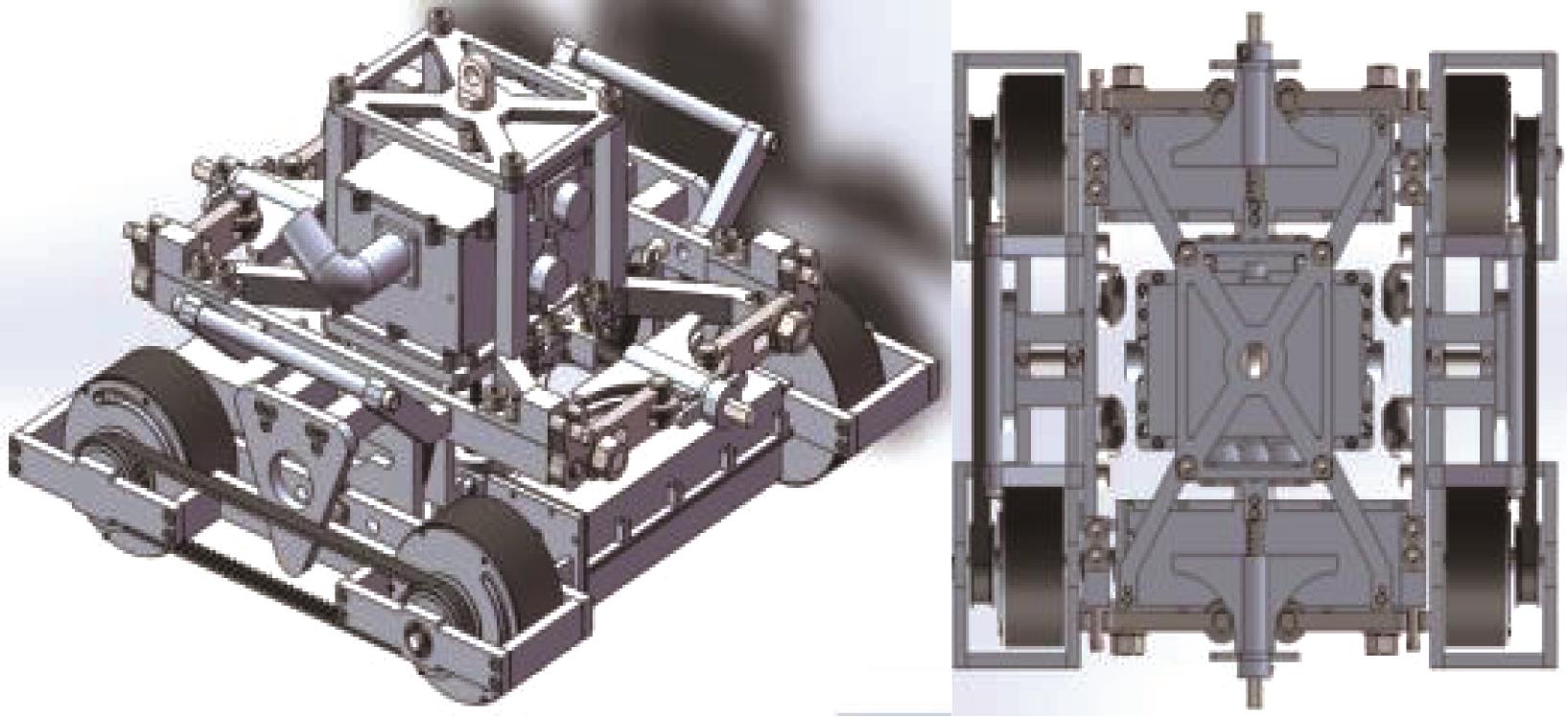
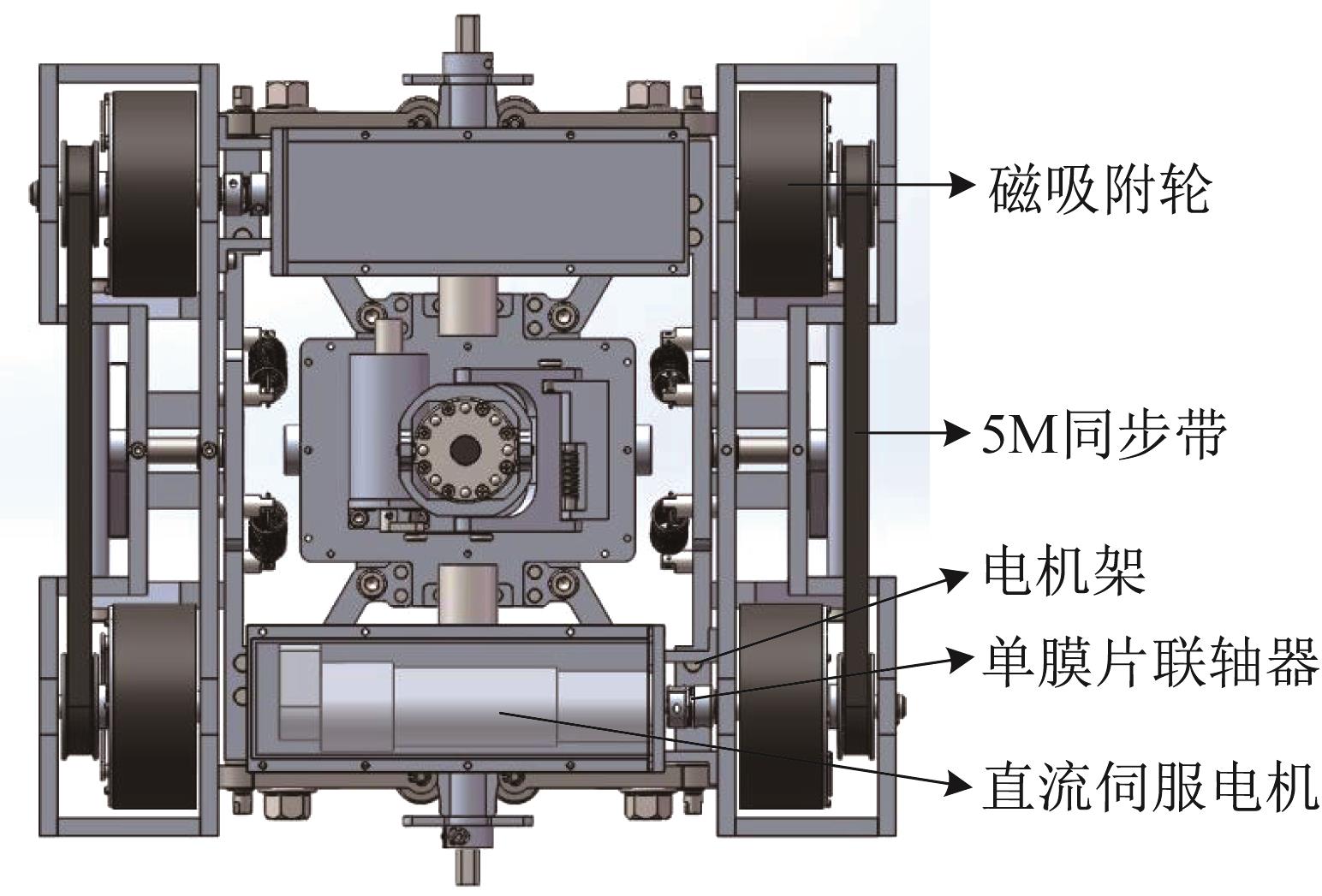
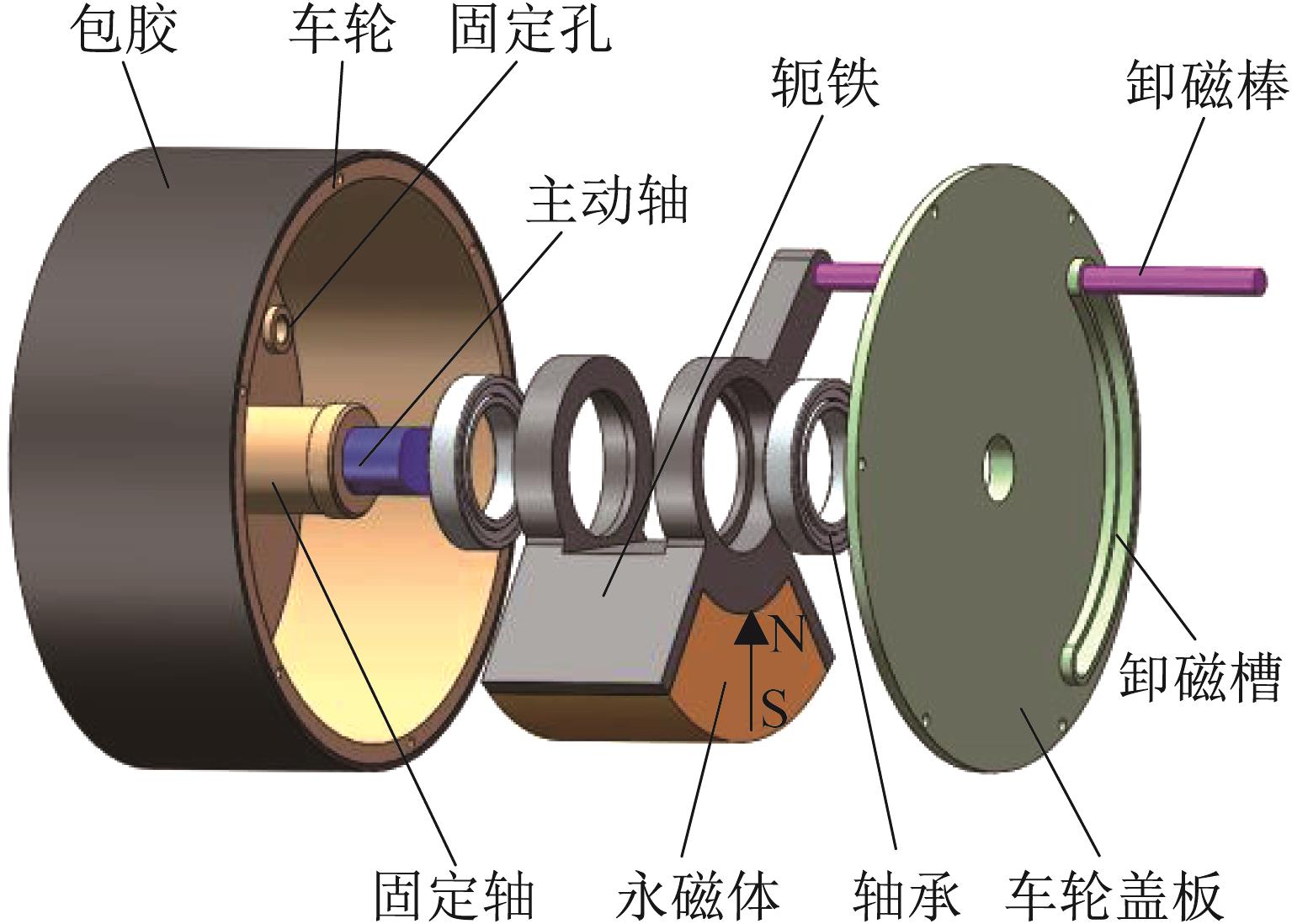
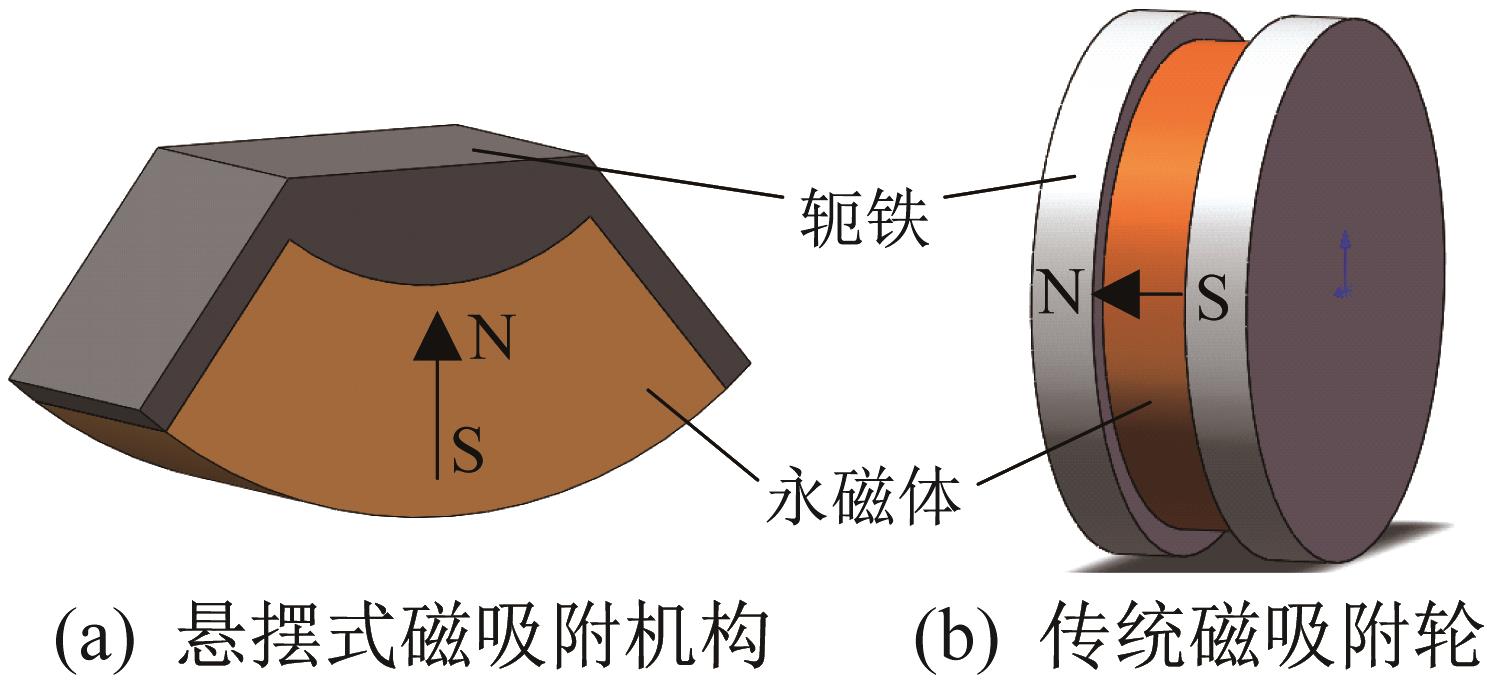
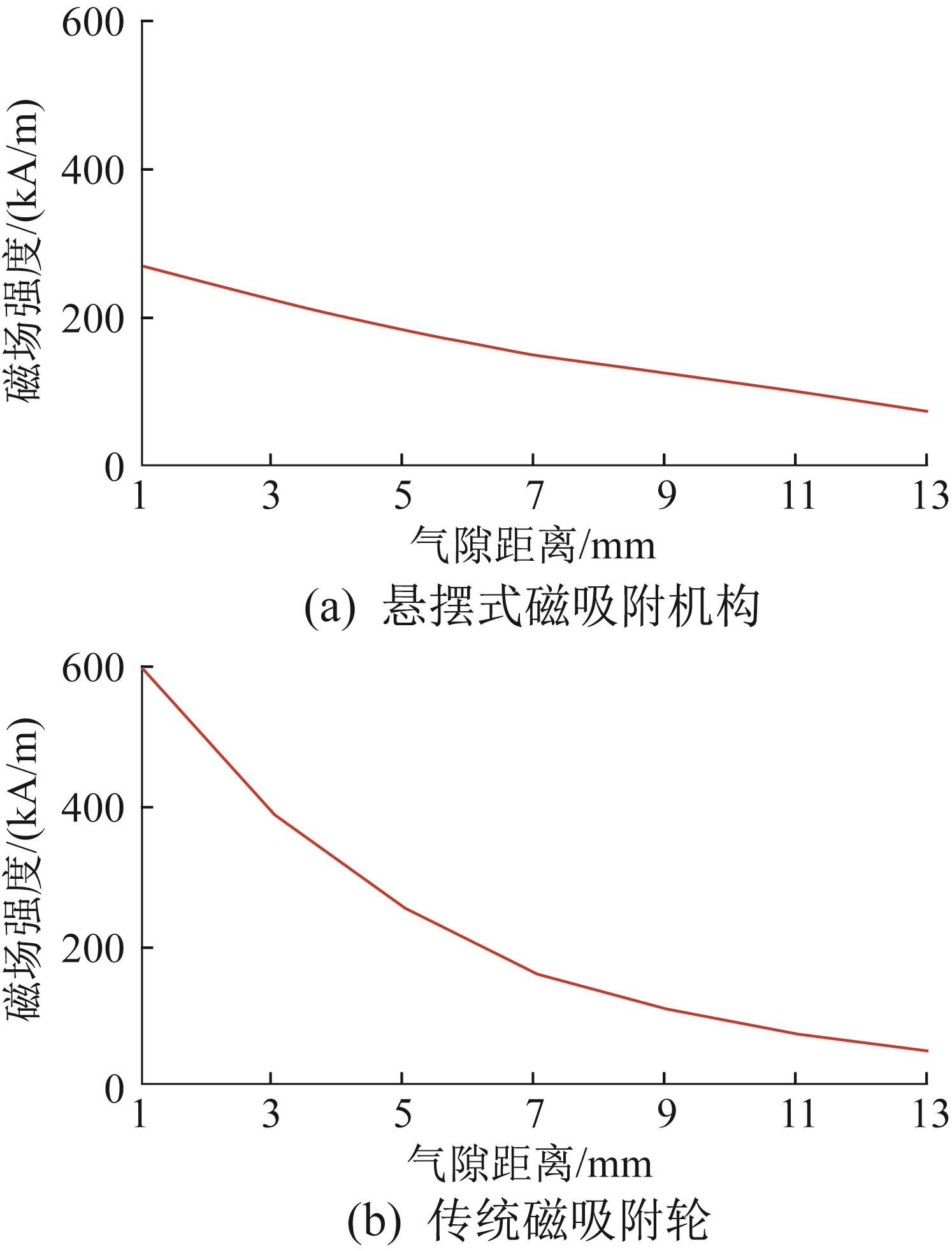
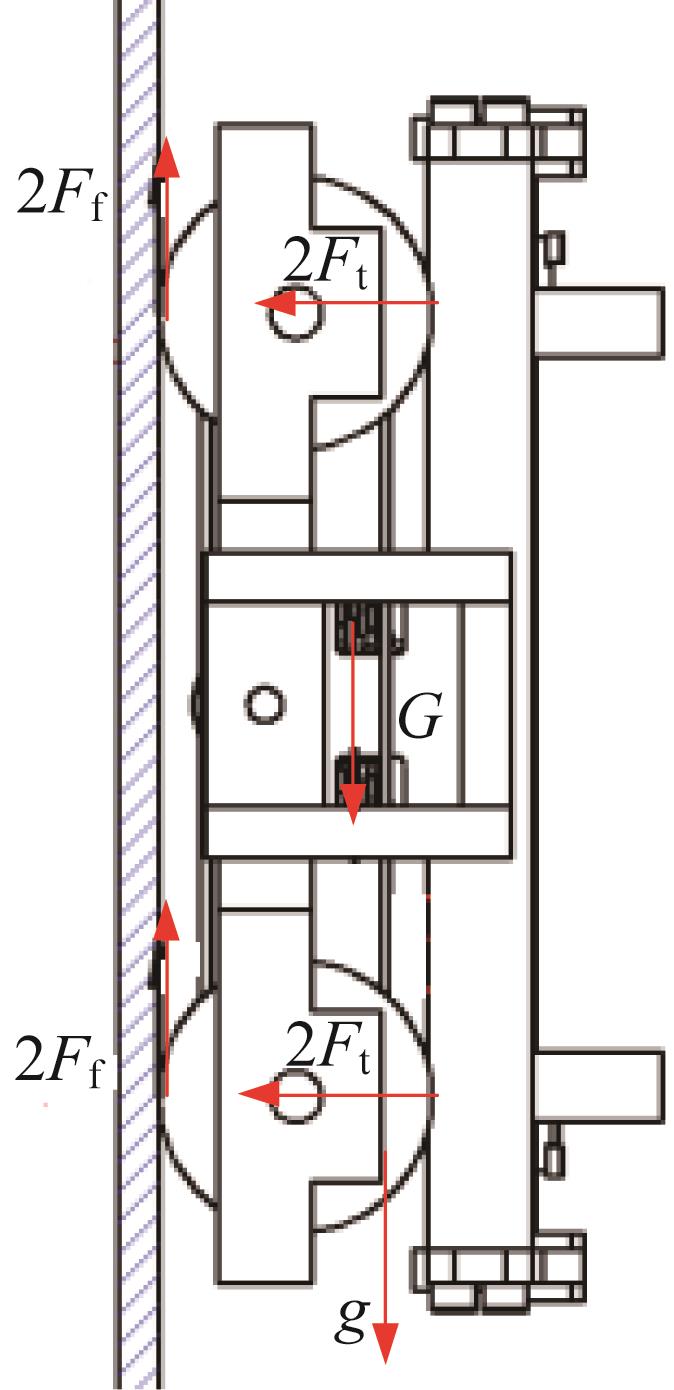
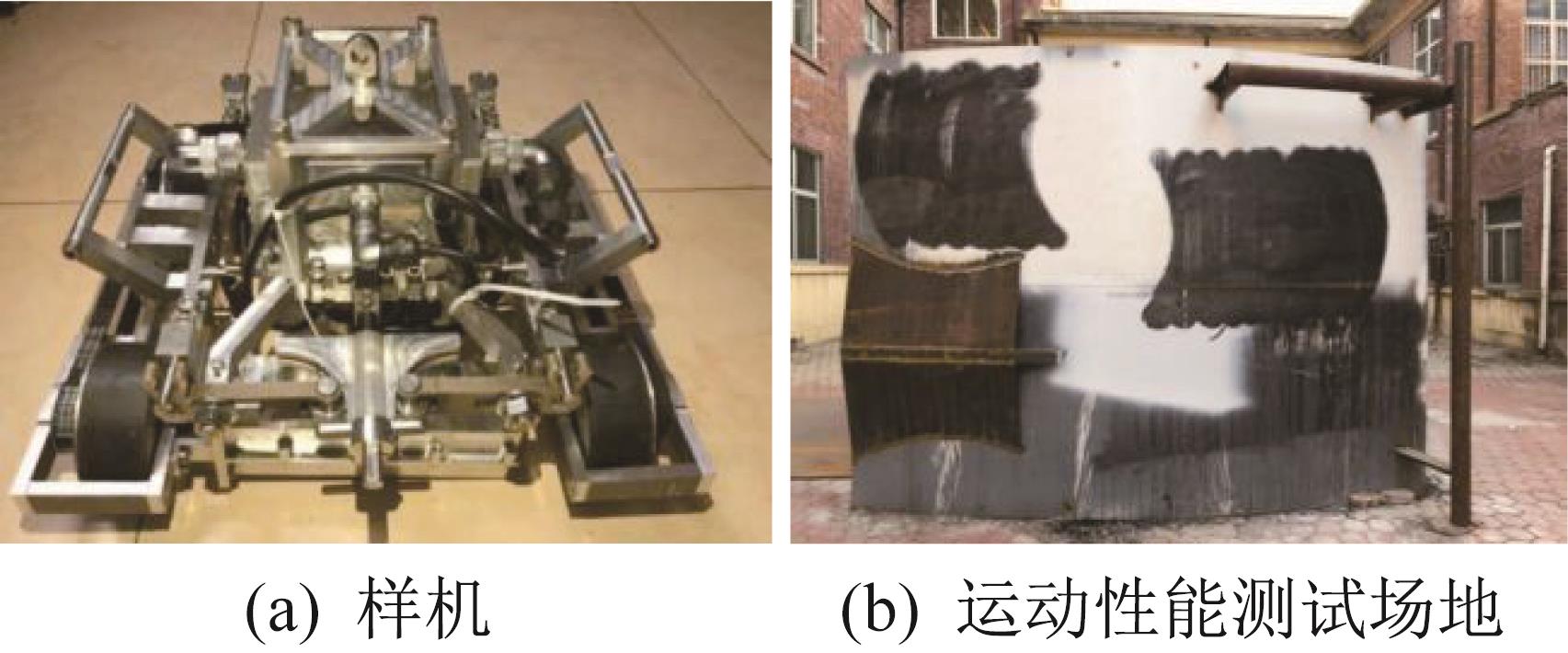
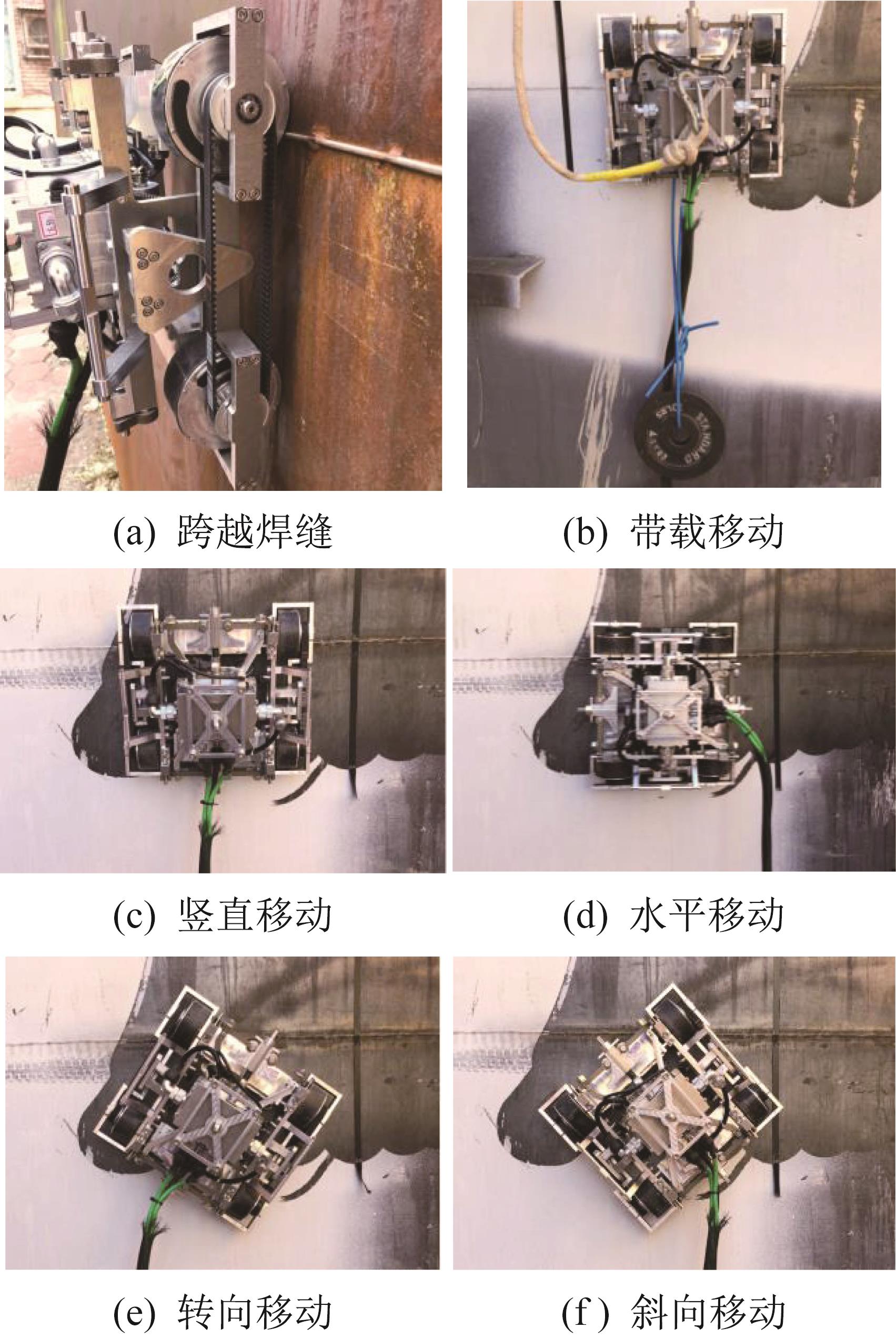
Abstract In order to solve the problems of poor wall adaptability and low movement flexibility of wall-climbing robots, the shortcomings of the existing magnetic adsorption mechanism of wall-climbing robots were analyzed. Taking a wheeled wall-climbing robot as research object, a wall adaptive pendulous magnetic adsorption mechanism was designed based on the functional requirements of wall-climbing robots. A comparative analysis was conducted between the pendulous magnetic adsorption mechanism and the traditional magnetic adsorption wheel by Ansoft software. In order to further reduce the mass of the magnetic adsorption mechanism and improve its adsorption reliability, based on the goal of high magnetic energy utilization, SNLP (sequential non-linear programming) algorithm was used to optimize the structural parameters of the pendulous magnetic adsorption mechanism. After optimization, the adsorption force of the magnetic adsorption mechanism was increased by 25.52%. A prototype of pendulous magnetic adsorption wheel was developed and the adsorption force testing experiment and demagnetization experiment were conducted. Motion performance testing experiment was carried after installing the pendulous magnetic adsorption wheel on a wall-climbing robot to verify the rationality of the optimization results of the structural parameters of the magnetic adsorption mechanism and the practicality of the structural design. The research results provide a reference for improving the working performance of wall-climbing robots.
|
|
Received: 04 June 2022
Published: 06 July 2023
|
|
|
|
Corresponding Authors:
Pei YANG
E-mail: 2010078@hebut.edu.cn;yang_p1993@163.com
|
爬壁机器人悬摆式磁吸附机构的设计与优化
为了解决爬壁机器人壁面适应能力差、运动灵活性低等问题,分析了现有爬壁机器人磁吸附机构存在的不足,并以轮式爬壁机器人为研究对象,根据爬壁机器人的功能要求,设计了一种壁面自适应悬摆式磁吸附机构。通过Ansoft软件对悬摆式磁吸附机构和传统磁吸附轮进行了对比分析。为了进一步减小磁吸附机构的质量,同时提高其吸附可靠性,基于高磁能利用率的目标,采用SNLP(sequential non-linear programming,连续非线性规划)算法对悬摆式磁吸附机构的结构参数进行优化,优化后磁吸附机构的吸附力增大了25.52%。研制了悬摆式磁吸附车轮样机,开展了吸附力测试实验和卸磁实验,并将其安装在爬壁机器人上,开展了运动性能测试实验,验证了磁吸附机构结构参数优化结果的合理性和结构设计的实用性。研究结果为提高爬壁机器人的工作性能提供了参考。
关键词:
爬壁机器人,
悬摆式磁吸附机构,
磁路仿真分析,
参数优化
|
|
| [1] |
程思敏, 陈韦宇, 丛培杰.爬壁机器人的研究现状[J].机电工程技术,2019,48(9):6-10. doi:10.3969/j.issn.1009-9492.2019.09.003
CHENG S M, CHEN W Y, CONG P J. Research status for wall-climbing robot[J]. Mechanical & Electrical Engineering Technology, 2019, 48(9): 6-10.
doi: 10.3969/j.issn.1009-9492.2019.09.003
|
|
|
| [2] |
TAVAKOLI M, VIEGAS C. Analysis and application of dual-row omnidirectional wheels for climbing robots[J]. Mechatronics, 2014, 24(5): 436-448.
|
|
|
| [3] |
EICH M, BONNIN-PASCUAL F, GARCIA-FIDALGO E, et al. A robot application for marine vessel inspection[J]. Journal of Field Robotics, 2014, 31(2): 319-341.
|
|
|
| [4] |
FAINA A, SOUTO D, DEIBE A, et al. Development of a climbing robot for grit blasting operations in shipyards[C]//2009 IEEE International Conference on Robotics and Automation. Kobe, Japan, 12-17 May, 2009. doi:10.1109/ROBOT.2009.5152584
doi: 10.1109/ROBOT.2009.5152584
|
|
|
| [5] |
LEE G, WU G, KIM J, et al. High-payload climbing and transitioning by compliant locomotion with magnetic adhesion[J]. Robotics and Autonomous Systems, 2012, 60(10): 1308-1316.
|
|
|
| [6] |
SONG Y K, LEE C M, KOO I M, et al. Development of wall climbing robotic system for inspection purpose[C]//2008 IEEE/RSJ International Conference on Intelligent Robots and Systems. IEEE, 2008: 1990-1995.
|
|
|
| [7] |
王吉岱,孔辉,陈广庆,等.新型罐壁检测爬行机器人的行走吸附机构设计[J].机械设计与制造,2013(1):26-28. doi:10.3969/j.issn.1001-3997.2013.01.010
WANG J D, KONG H, CHEN G Q, et al. The walk-adsorption mechanism design of a new tank-wall-climbing inspection robot[J]. Machinery Design & Manufacture, 2013(1): 26-28
doi: 10.3969/j.issn.1001-3997.2013.01.010
|
|
|
| [8] |
王洋,张小俊,张明路,等.可自适应变曲率立面的分体柔性爬壁机器人设计与分析[J].机械工程学报,2021, 57(3):49-58. doi:10.3901/jme.2021.03.049
WANG Y, ZHANG X J, ZHANG M L, et al. Design and analysis of split-flexible wall-climbing robot with adaptive variable curvature facade[J]. Journal of Mechanical Engineering, 2021, 57(3): 49-58.
doi: 10.3901/jme.2021.03.049
|
|
|
| [9] |
SHAO J, LI X F, ZONG C G, et al. A wall-climbing robot with gecko features[C]//International Conference on Mechatronics & Automation. Chengdu, China, 5-8. Aug., 2012.
|
|
|
| [10] |
GAO X S, SHAO J, DAI F Q, et al. Strong magnetic units for a wind power tower inspection and maintenance robot[J]. International Journal of Advanced Robotic Systems, 2012, 9(5):189. doi:10.5772/53780
doi: 10.5772/53780
|
|
|
| [11] |
GAO X S, SHAO J, DAI F Q, et al. A gecko-inspired robot for wind power tower inspection[J]. Applied Mechanics and Materials, 2014, 461: 831-837.
|
|
|
| [12] |
KALRA L P, GU J, MENG M. A wall climbing robot for oil tank inspection[C]//IEEE International Conference on Robotics and Biomimetics. Sanya, China, 15-18, Dec., 2007.
|
|
|
| [13] |
HU J Y, HAN X, TAO Y R, et al. A magnetic crawler wall-climbing robot with capacity of high payload on the convex surface[J]. Robotics and Autonomous Systems, 2022, 148: 103907.
|
|
|
| [14] |
陈勇,王昌明,包建东.新型爬壁机器人磁吸附单元优化设计[J].兵工学报,2012,33(12):1539-1544.
CHEN Y, WANG C M, BAO J D. Optimization of a novel magnetic adsorption unit for wall-climbing robot[J]. Acta Armamentarii, 2012, 33 (12): 1539-1544.
|
|
|
| [15] |
张小松.轮式悬磁吸附爬壁机器人研究[D].哈尔滨:哈尔滨工业大学,2012:12-28.
ZHANG X S. Research on wheeled suspended magnetic climbing wall robot[D]. Harbin: Harbin Institute of Technology, 2012: 12-28.
|
|
|
| [16] |
FERNÁNDEZ R, GONZÁLEZ E, FELIÚ V, et al. A wall climbing robot for tank inspection. an autonomous prototype[C]//36th Annual Conference on IEEE Industrial Electronics. Glendale, USA, 7-10, Nov., 2010.
|
|
|
| [17] |
潘柏松,张晋,魏凯,等.基于Halbach阵列爬壁机器人永磁轮吸附单元的设计与优化[J].浙江工业大学学报,2015,43(4):393-397. doi:10.3969/j.issn.1006-4303.2015.04.009
PAN B S, ZHANG J, WEI K, et al. The optimization of a novel permanent-magnetic wheel adsorption unit for wall-climbing robot based on Halbach array[J]. Journal of Zhejiang University of Technology, 2015, 43(4): 393-397.
doi: 10.3969/j.issn.1006-4303.2015.04.009
|
|
|
| [18] |
吴明晖.面向焊接任务的轮足式非接触磁吸附爬壁机器人研究[D].上海:上海交通大学,2014:27-52.
WU M H. Research on wheel foot type non-contact magnetic adsorption wall climbing robot for welding task[D]. Shanghai: Shanghai Jiaotong University, 2014: 27-52.
|
|
|
| [19] |
沈青青,张晋,李根.基于Halbach阵列爬壁机器人磁吸附单元的优化设计[J].轻工机械,2014,32(5):17-21. doi:10.3969/j.issn.1005-2895.2014.05.005
SHEN Q Q, ZHANG J, LI G. Optimized design of magnetic adsorption unit for wall-climbing robots based on halbach array[J]. Light Industry Machinery, 2014, 32(5): 17-21.
doi: 10.3969/j.issn.1005-2895.2014.05.005
|
|
|
| [20] |
WANG R, KAWAMURA Y. A magnetic climbing robot for steel bridge inspection[C]//Proceeding of the 11th World Congress on Intelligent Control and Automation. Shenyang, China, June 29-July 4, 2014.
|
|
|
| [21] |
成大先.机械设计手册(第三卷)[M]. 3版.北京:化学工业出版社,1993:11-50.
CHENG D X. Mechanical design manual (volume Ⅲ) [M]. 3th ed. Beijing: Chemical Industry Press, 1993: 11-50.
|
|
|
| [22] |
刘国强,赵凌云,蒋继娅. Ansoft工程电磁场有限元分析[M].北京:电子工业出版社,2005:3-62.
LIU G Q, ZHAO L Y, JIANG J Y. Ansoft engineering electromagnetic field finite element analysis[M]. Beijing: Publishing House of Electronics Industry, 2005: 3-62.
|
|
|
| [23] |
黄哲轩.石化储罐壁面检测爬壁机器人设计及其特性研究[D].天津:河北工业大学,2018:39-52.
HUANG Z X. Design and characteristic research of wall-climbing robot for petrochemical storage tank wall inspection[D]. Tianjin: Hebei University of Technology, 2018: 39-52.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|