| Machinery System Dynamics |
|


|
|
|
| Terrain adaptive mechanism design and obstacle-surmounting performance analysis of wheeled search and rescue robot |
Di ZHAO( ),Guo CHEN,Xiaoli CHEN,Xiongjin WANG ),Guo CHEN,Xiaoli CHEN,Xiongjin WANG |
| School of Mechanical Engineering, Hubei University of Technology, Wuhan 430068, China |
|
|
|
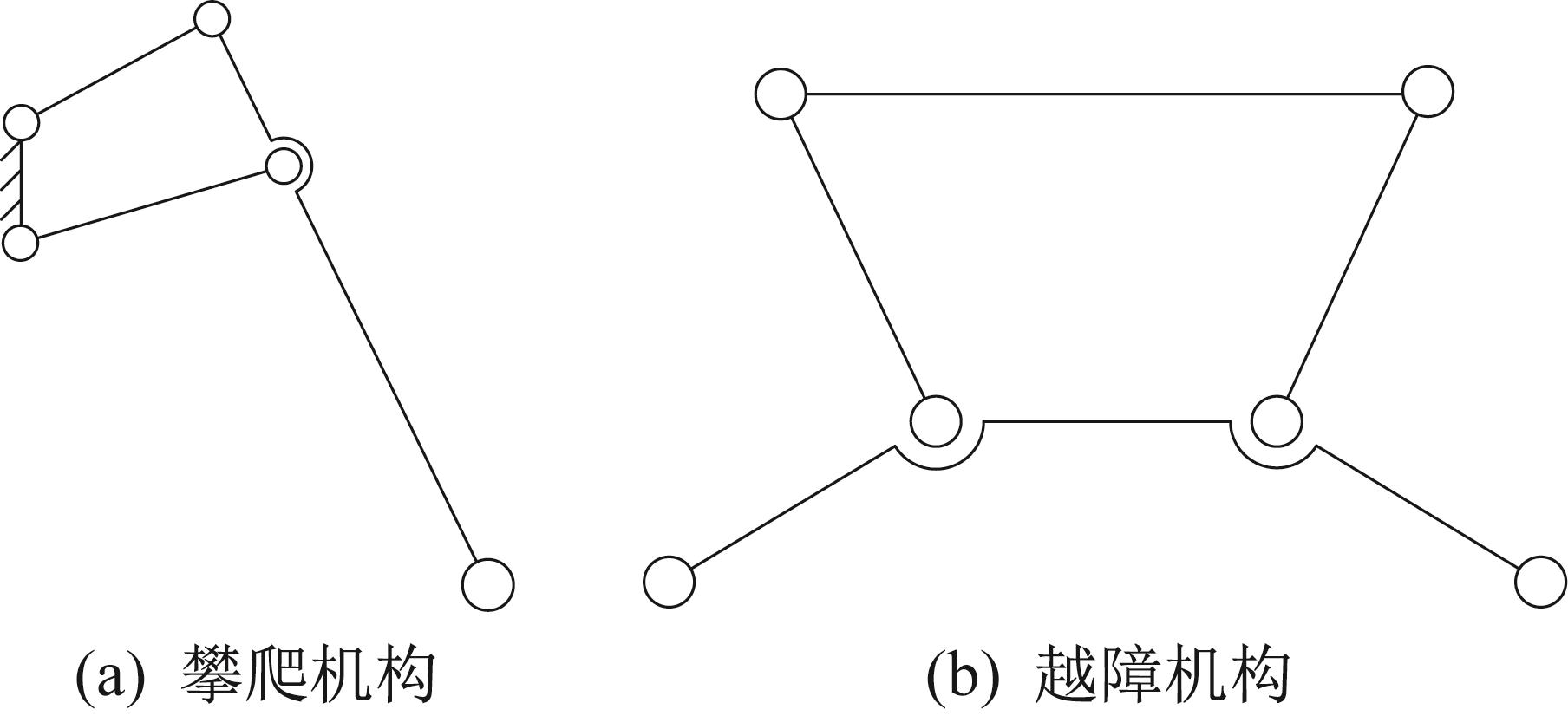
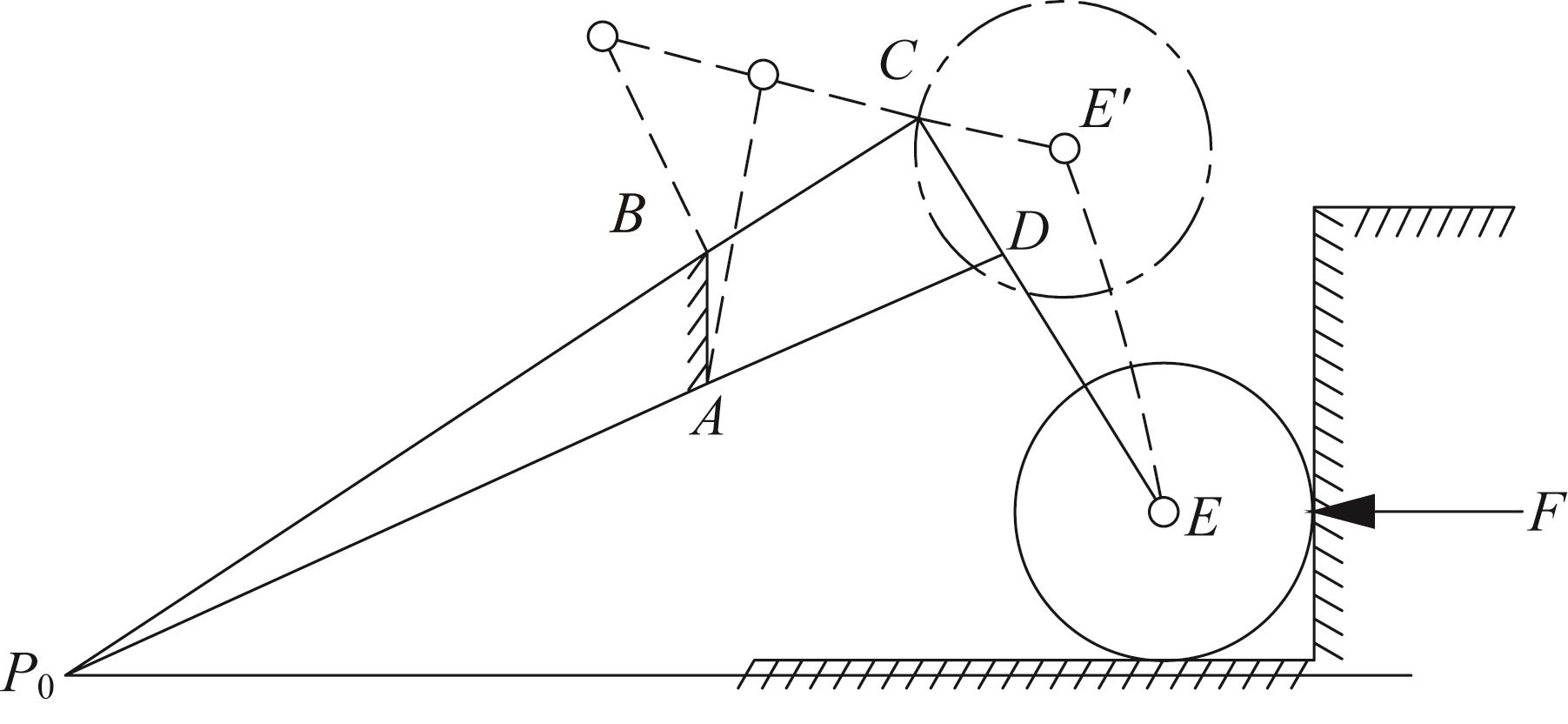
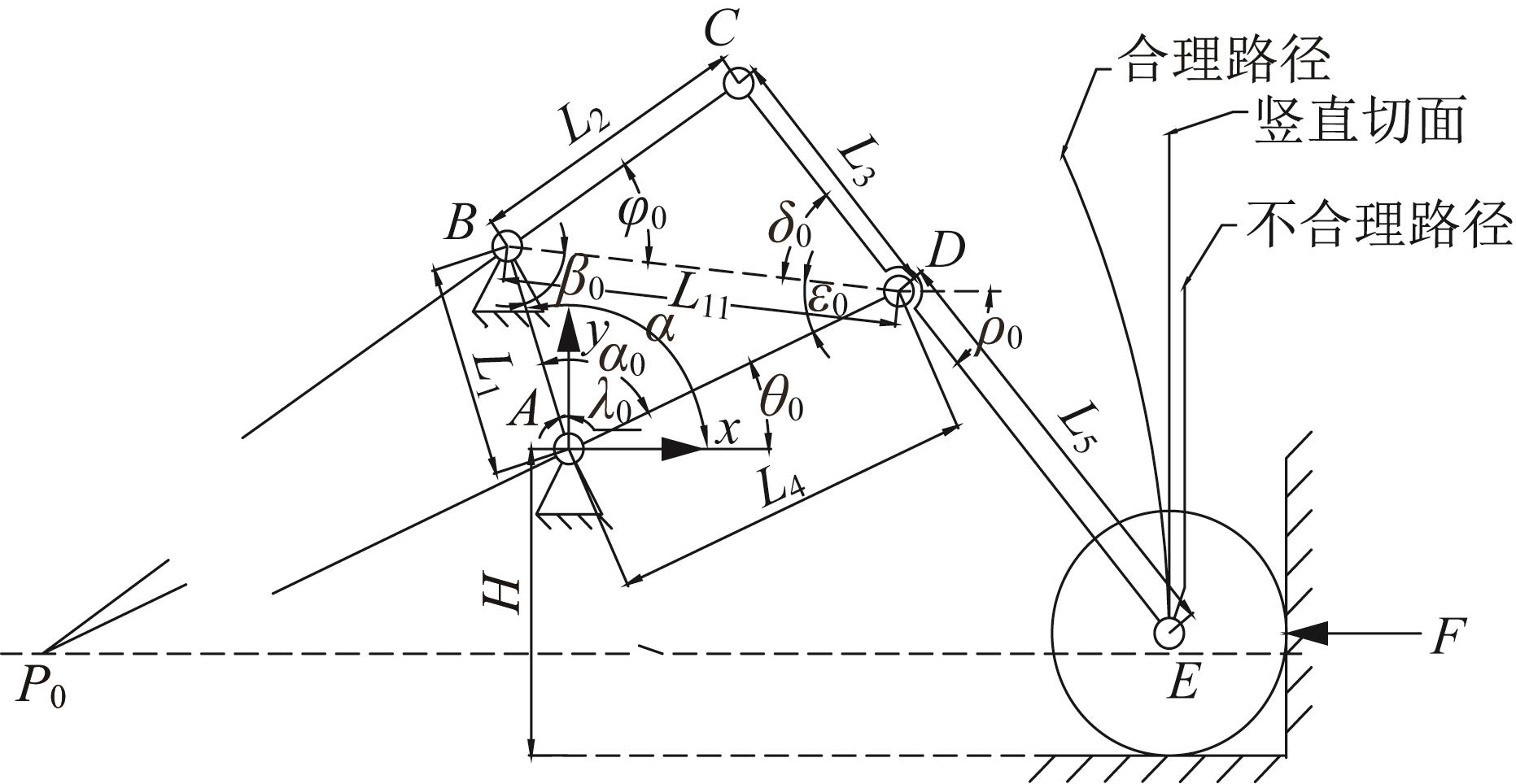
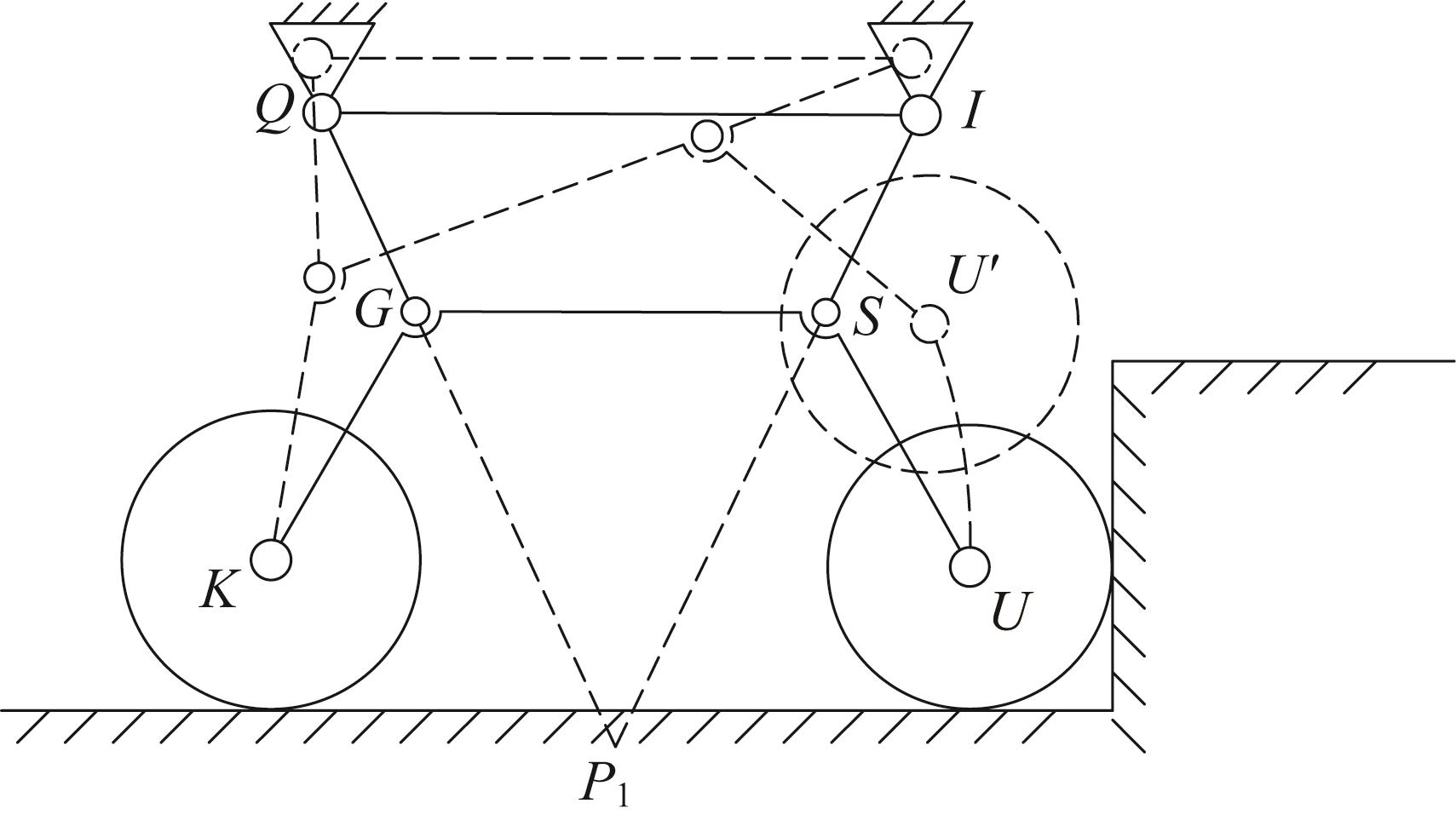
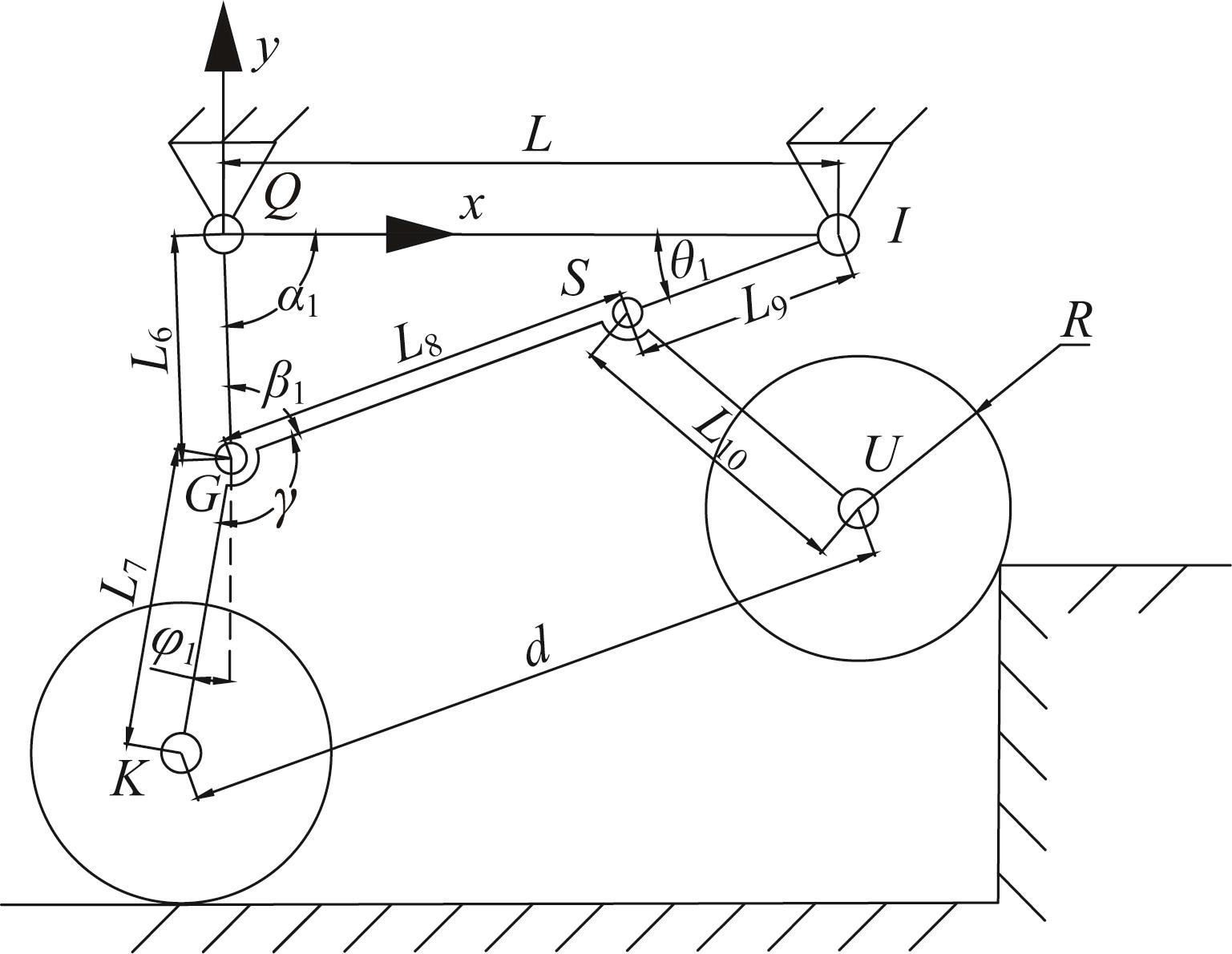
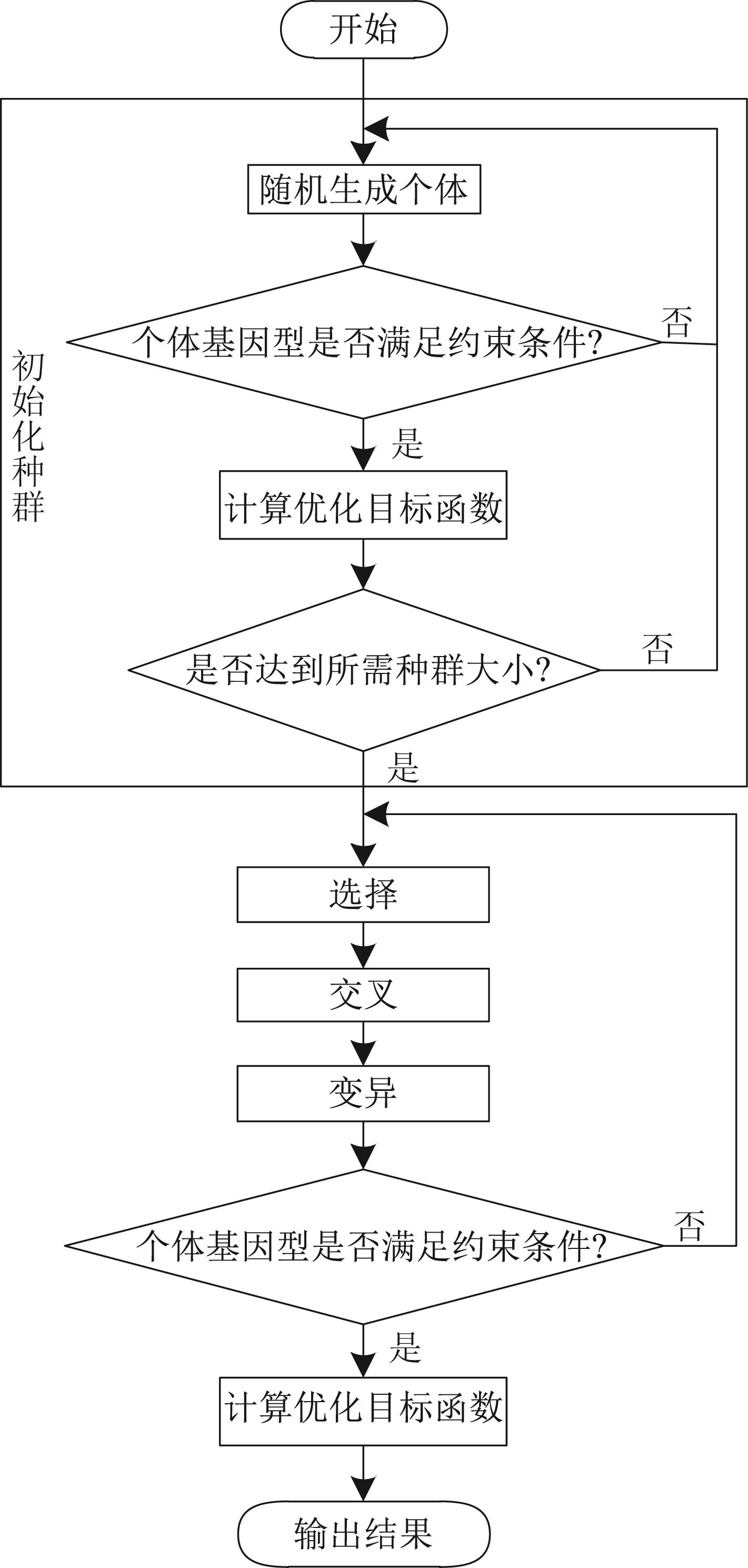
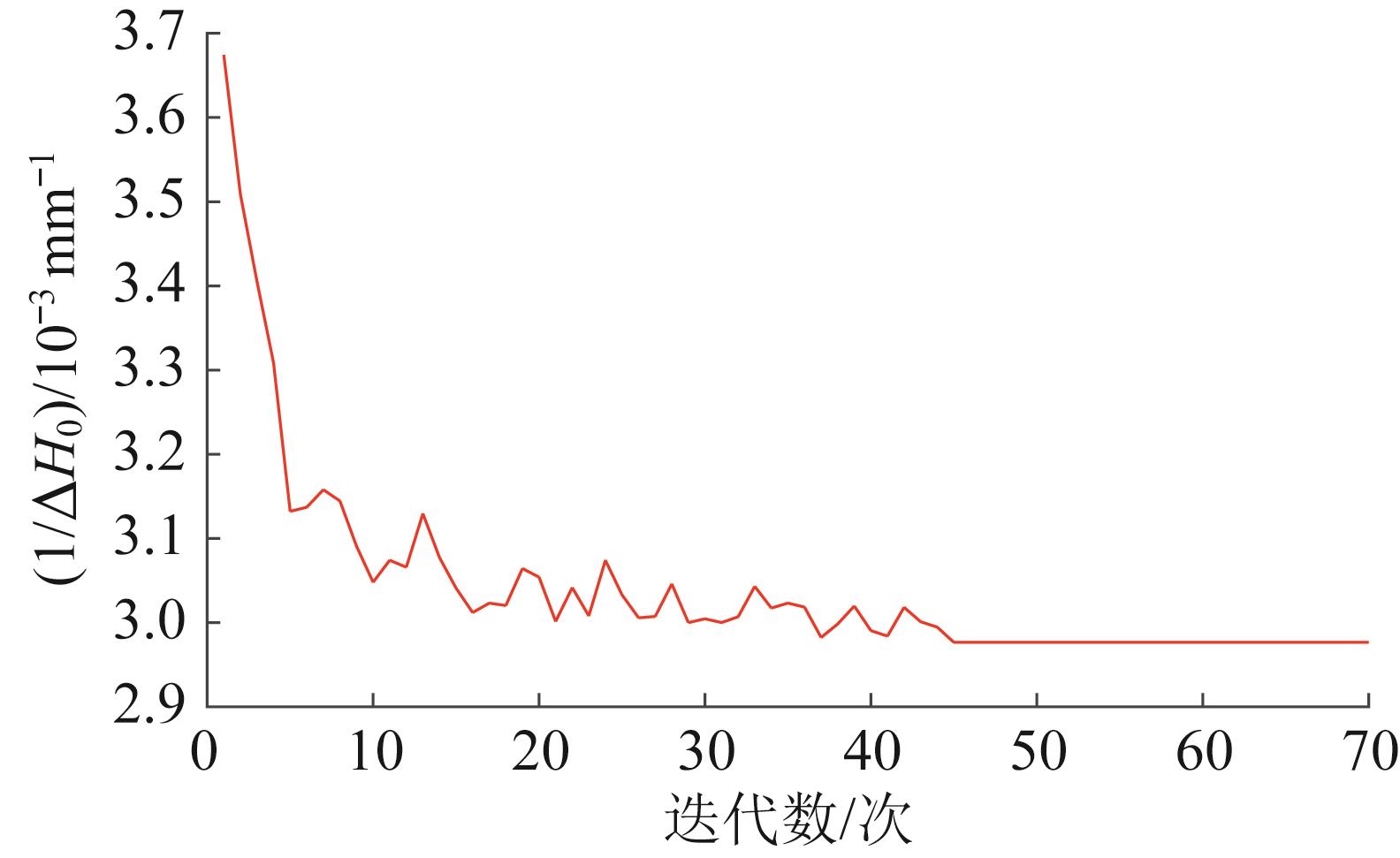
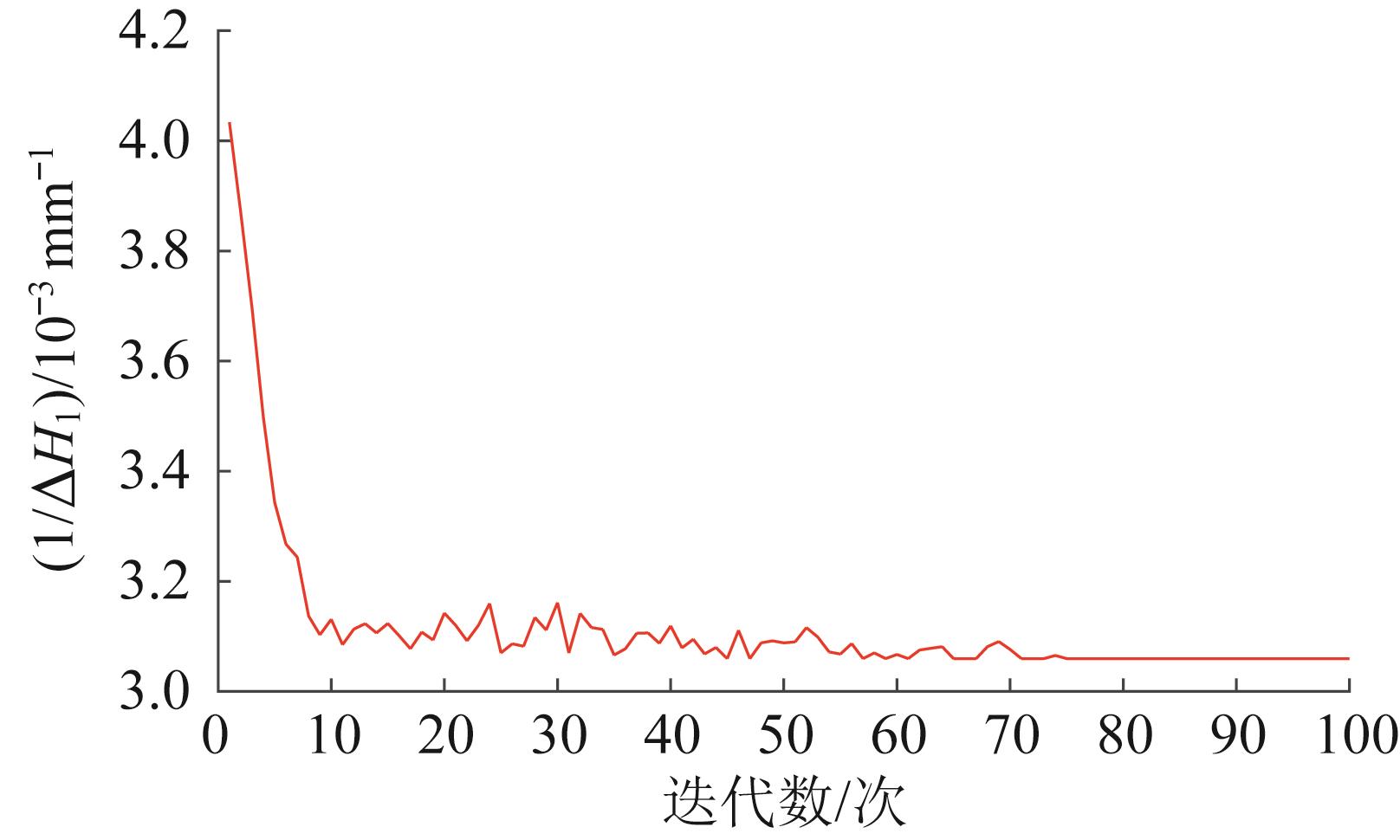
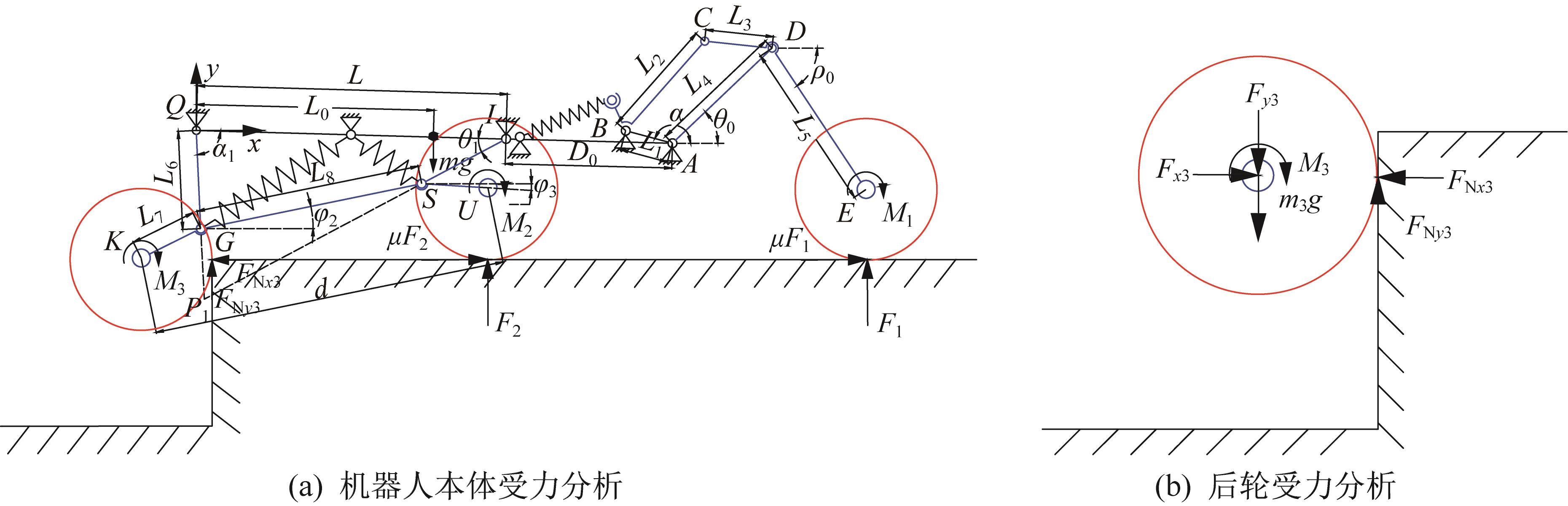
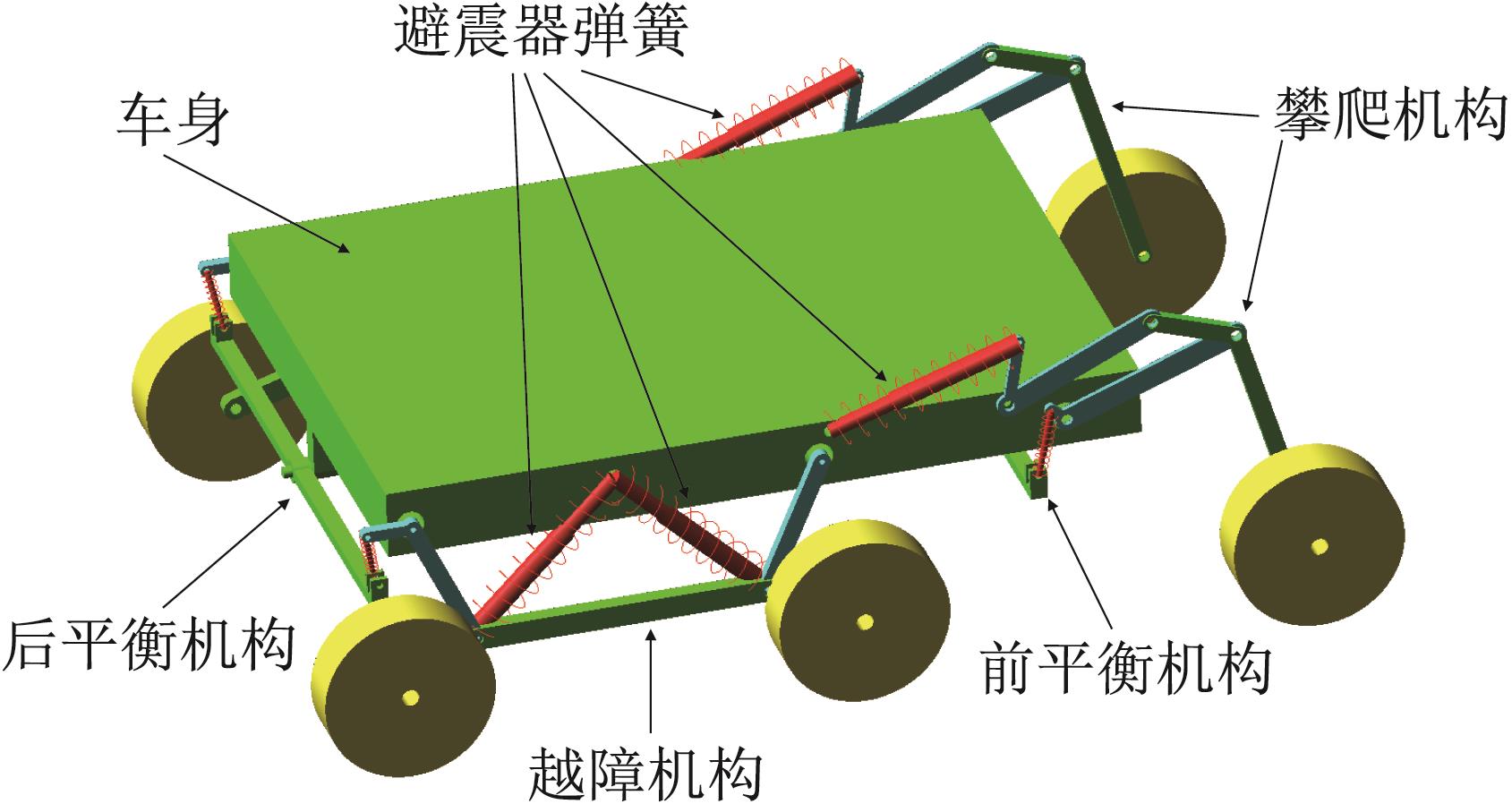
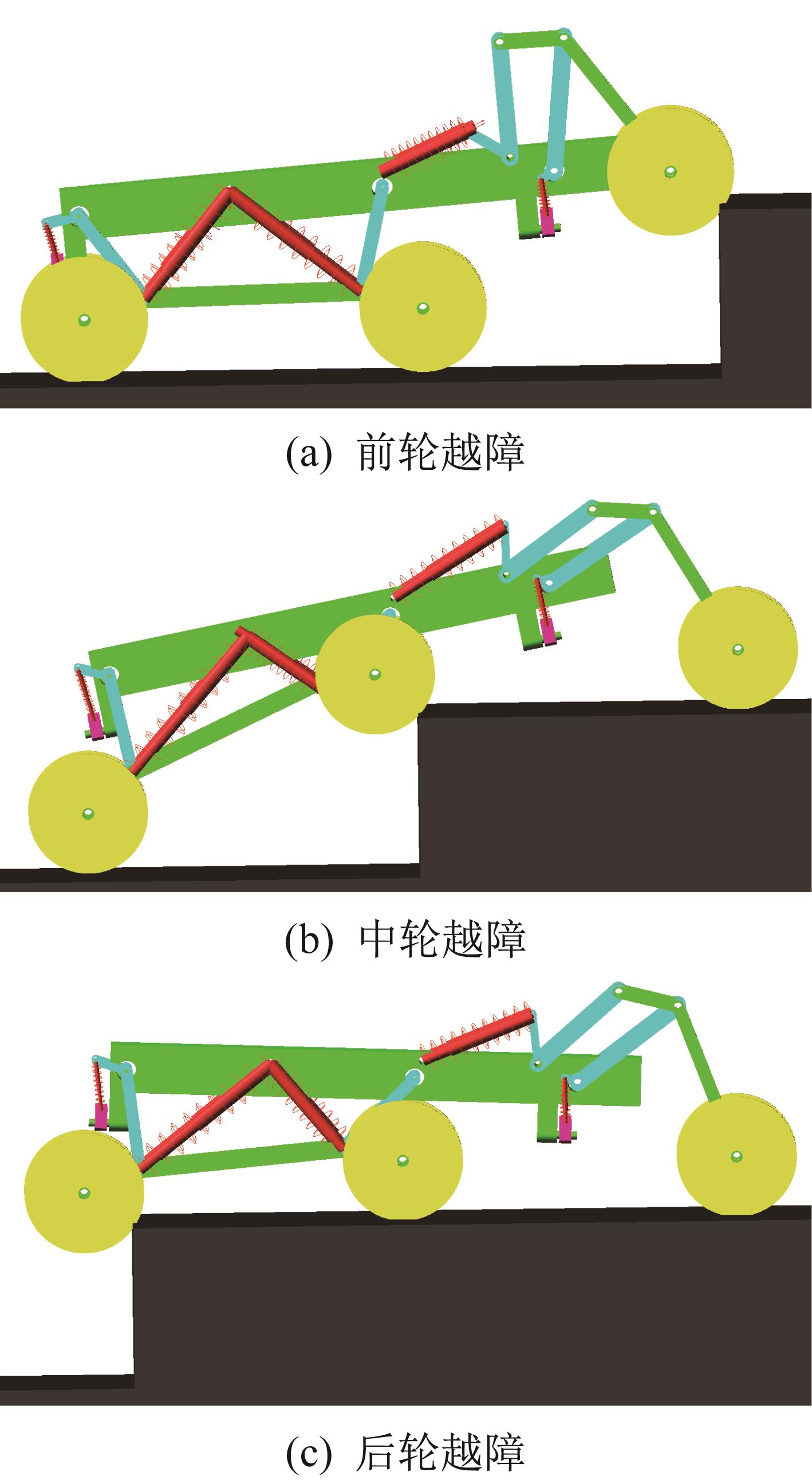
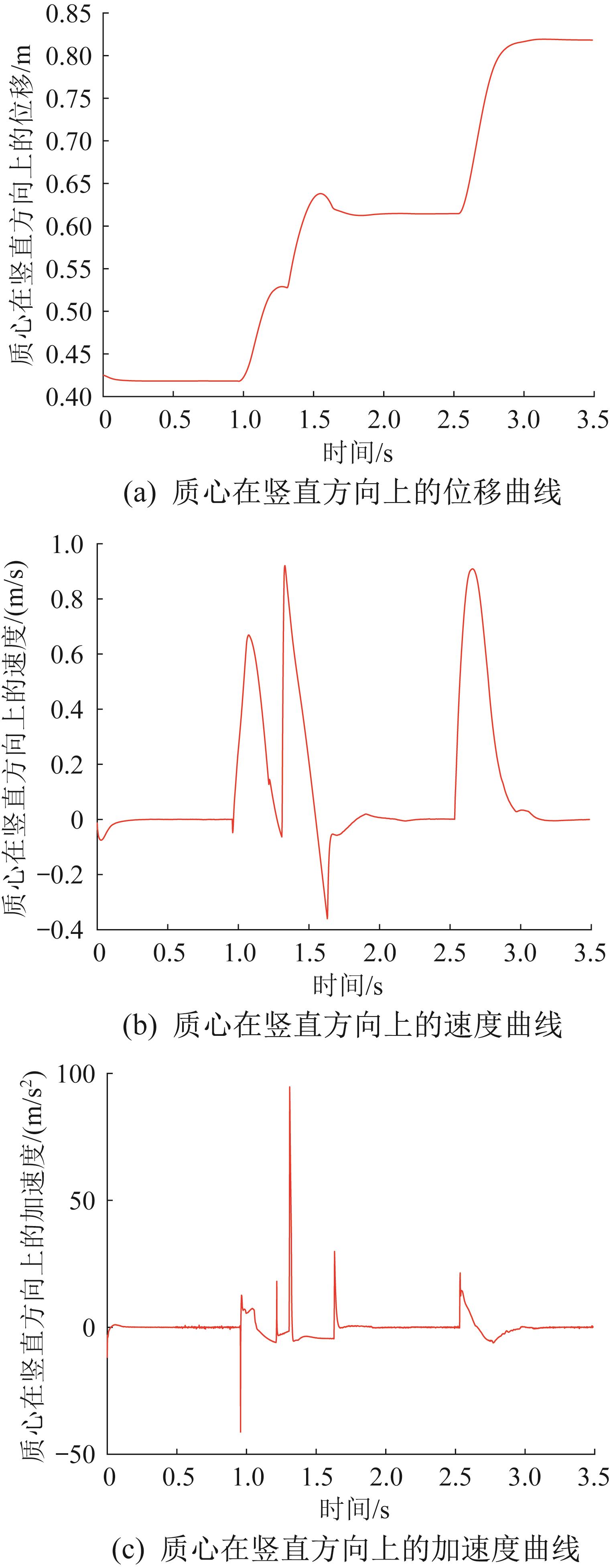
Abstract Aiming at the requirements of obstacle-surmounting performance of search and rescue robots in complex terrain environment, a passive terrain adaptive mechanism for wheeled search and rescue robot is designed, and its obstacle-surmounting performance is analyzed. Firstly, based on the analysis of traditional obstacle-surmounting mechanism, the terrain adaptive mechanism was selected and optimized by genetic algorithm, so that the design of passive terrain adaptive mechanism for wheeled search and rescue robot was completed. Then, the dynamics model of wheeled search and rescue robot was established based on the D'Alembert principle, and its obstacle-surmounting ability was analyzed and calculated. Finally, a multi-rigid-body dynamics model of wheeled search and rescue robot was established, and its obstacle-surmounting performance simulation was carried out and compared with the theoretical calculation results. The comparison results verified the ability of obstacle-surmounting and terrain adaptation of the wheeled search and rescue robot. The research results can provide a theoretical basis for the prototype construction and subsequent research of wheeled search and rescue robots.
|
|
Received: 18 May 2022
Published: 03 November 2023
|
|
|
轮式搜救机器人地形自适应机构设计及越障性能分析
针对复杂地形环境下搜救机器人越障性能的要求,设计了一种轮式搜救机器人的被动地形自适应机构,并对其越障性能进行了分析。首先,在分析传统越障机构的基础上,开展了地形自适应机构的选型,并结合遗传算法对其进行优化,完成了对轮式搜救机器人被动地形自适应机构的设计。然后,基于达朗贝尔原理建立了轮式搜救机器人的动力学模型,并对其越障能力进行了分析与计算。最后,建立轮式搜救机器人的多刚体动力学模型,开展了越障性能仿真,并与理论计算结果进行了对比。对比结果验证了轮式搜救机器人的越障及地形自适应能力。研究结果可为轮式搜救机器人样机的搭建及后续研究的开展提供理论依据。
关键词:
轮式搜救机器人,
被动地形自适应,
遗传算法,
动力学建模与仿真
|
|
| [1] |
祝甜一.基于 ROS 的自主式救援机器人 SLAM 和导航系统研究[D].南京:东南大学,2015:1-4.
ZHU T Y. Research of SLAM and navigation system of autonomous rescue robots based on ROS[D]. Nanjing: Southeast University, 2015: 1-4.
|
|
|
| [2] |
杨璐.月球车悬架的机理分析及参数优化[D]. 长春:吉林大学,2007:13-18.
YANG L. Mechanism analysis and parameter optimization on suspension for lunar rover[D]. Changchun: Jilin University, 2007: 13-18.
|
|
|
| [3] |
陈百超.月球车新型移动系统设计[D].长春:吉林大学,2009:33-39.
CHEN B C. Design of a locomotion system for lunar rover[D]. Changchun: Jilin University, 2009: 33-39.
|
|
|
| [4] |
陈世荣,许旻,杨杰.双曲柄机构在移动机器人中的应用与优化[J].中国机械工程,2007,18(10):1139-1142. doi:10.3321/j.issn:1004-132X.2007.10.002
CHEN S R, XU M, YANG J. Design and optimization of fork using in robot[J]. China Mechanical Engineering, 2007, 18(10): 1139-1142.
doi: 10.3321/j.issn:1004-132X.2007.10.002
|
|
|
| [5] |
尚建忠.空间探测机器人移动机构及系统研究[D].武汉:华中科技大学,2006:45-50.
SHANG J Z. Research on the locomotion mechanism and system of space exploring robot[D]. Wuhan: Huazhong University of Science and Technology, 2006: 45-50.
|
|
|
| [6] |
刘金生.基于ADAMS六轮悬架式火星车的建模与仿真[D].北京:北京邮电大学,2019:11-16.
LIU J S. Modeling and simulation of a six-wheel suspended rovers based on ADAMS[D]. Beijing: Beijing University of Posts and Telecommunications, 2019: 11-16.
|
|
|
| [7] |
NASA. A brief history of the lunar roving vehicle[EB/OL].(2002-04-03)[2022-05-17]. .
|
|
|
| [8] |
卢波,范嵬娜.国外月球车及火星车技术发展综述[C]//中国空间科学学会空间探测专业委员会第十八次学术会议论文集(上册).重庆:中国空间科学学会,2005:69-75.
LU B, FAN W N. A review of the development of lunar rover and mars rover technology abroad [C]//Proceedings of the 18th Academic Conference of Space Exploration Committee of Chinese Society of Space Sciences. Chongqing: Chinese Society of Space Sciences, 2005: 69-75.
|
|
|
| [9] |
THUEER T. Mobility evaluation of wheeled all-terrain robots[J]. Robotics & Autonomous Systems, 2010, 58(5): 508-519.
|
|
|
| [10] |
杨武林.自适应关节轮式移动机器人设计与研究[D].绵阳:西南科技大学,2020:12-14.
YANG W L. Design and research of adaptive-joint wheeled mobile robot[D]. Mianyang: Southwest University of Science and Technology, 2020: 12-14.
|
|
|
| [11] |
关似玉.六轮全地形移动机器人的结构设计及样机研制[D].北京:北京石油化工学院,2016:14-24.
GUAN S Y. Structural design and prototype development of a six wheel all-terrain mobile robot[D]. Beijing: Beijing Institute of Petrochemical Technology, 2016: 14-24.
|
|
|
| [12] |
王奉晨.全地形轮式移动机器人设计与性能分析[D].成都:西南交通大学,2018:2-7.
WANG F C. Design and performance analysis of all-terrain wheel mobile robot[D]. Chengdu: Southwest Jiaotong University, 2018: 2-7.
|
|
|
| [13] |
杨飞.轮式星球漫游车移动机构折展构型综合与分析[D].哈尔滨:哈尔滨工业大学,2014:2-5. doi:10.3901/jme.2014.05.001
YANG F. Structural synthesis and analysis of folded-deployable locomotion system for wheeled planetary rover[D]. Harbin: Harbin University of Technology, 2014: 2-5.
doi: 10.3901/jme.2014.05.001
|
|
|
| [14] |
魏毅龙.煤矿井下探测与搜救机器人机械系统设计与研究[D].徐州:中国矿业大学,2014:8-22.
WEI Y L. Design and study of the mechanical system for mine detection and rescue robot[D]. Xuzhou: China University of Mining and Technology, 2014: 8-22.
|
|
|
| [15] |
张彦囡.基于多组连杆机构的爬楼越障机器人的设计与分析[D].青岛:山东科技大学,2017:9-17.
ZHANG Y N. Design and analysis of climbing robot based on multi-group linkage mechanism[D]. Qingdao: Shandong University of Science and Technology, 2017: 9-17.
|
|
|
| [16] |
魏军英,杨世强,王吉岱,等.八轮式爬楼越障机器人设计与仿真分析[J].机械科学与技术,2019,38(10):1519-1525. doi:10.13433/j.cnki.1003-8728.20190014
WEI J Y, YANG S Q, WANG J D, et al. Design and simulation analysis of an eight-wheeled climbing obstacle robot[J]. Mechanical Science and Technology for Aerospace Engineering, 2019, 38(10): 1519-1525.
doi: 10.13433/j.cnki.1003-8728.20190014
|
|
|
| [17] |
曹冲振,张吉亮,王凤芹,等.虾形六轮移动机器人头部机构综合[J].山东科技大学学报(自然科学版),2010,29(1):58-61. doi:10.16452/j.cnki.sdkjzk.2010.01.018
CAO C Z, ZHANG J L, WANG F Q, et al. Synthesis of the head mechanism for a new shrimp-shaped six-wheel mobile robot[J]. Journal of Shandong University of Science and Technology (Natural Science), 2010, 29(1): 58-61.
doi: 10.16452/j.cnki.sdkjzk.2010.01.018
|
|
|
| [18] |
范浩东,王宗彦,宋灵芝,等.基于NSGA-II算法的并联机器人结构分析及优化[J].机械设计与制造工程,2022,51(3):53-57.
FAN H D, WANG Z Y, SONG L Z, et al. Structural analysis and optimization of parallel robot based on NSGA-Ⅱ algorithm[J]. Machine Design and Manufacturing Engineering, 2022, 51(3): 53-57.
|
|
|
| [19] |
王麟,张建军,戚开诚,等.并联机构六维控制器的运动学性能分析及尺度优化[J].机械设计与研究,2020,36(1):75-82. doi:10.13952/j.cnki.jofmdr.2020.0016
WANG L, ZHANG J J, QI K C, et al. Kinematics performance analysis and scale optimization of parallel mechanism six-dimensional controller[J]. Machine Design & Research, 2020, 36(1): 75-82.
doi: 10.13952/j.cnki.jofmdr.2020.0016
|
|
|
| [20] |
王晓磊,王雪涛,孙丹丹,等.一种新型轮腿四足机器人腿部机构结构参数优化[J].机电工程,2022,39(4):547-553. doi:10.3969/j.issn.1001-4551.2022.04.018
WANG X L, WANG X T, SUN D D, et al. Optimization of structural parameters of leg mechanism for a new type of wheel legged quadruped robot[J]. Journal of Mechanical & Electrical Engineering, 2022, 39(4): 547-553.
doi: 10.3969/j.issn.1001-4551.2022.04.018
|
|
|
| [21] |
李永泉,郭雨,张阳,等.基于牛顿欧拉法的一种空间被动过约束并联机构动力学建模方法[J].机械工程学报,2020,56(11):48-57. doi:10.3901/jme.2020.11.048
LI Y Q, GUO Y, ZHANG Y, et al. Dynamic modeling method of spatial passive over-constrained parallel mechanism based on Newton Euler method[J]. Journal of Mechanical Engineering, 2020, 56(11): 48-57.
doi: 10.3901/jme.2020.11.048
|
|
|
| [22] |
朱坚民,李付才,李海伟,等.轮腿式爬楼梯移动机器人的设计及运动特性分析[J].中国机械工程,2013,24(20):2722-2730. doi:10.3969/j.issn.1004-132X.2013.20.005
ZHU J M, LI F C, LI H W, et al. Design and motion analysis of wheel-legged step-climbing mobile robot[J]. China Mechanical Engineering, 2013, 24(20): 2722-2730.
doi: 10.3969/j.issn.1004-132X.2013.20.005
|
|
|
| [23] |
刘昌文,徐天舒,李涛,等.基于人车耦合动力学模型的重型卡车平顺性仿真与优化[J].天津大学学报(自然科学与工程技术版),2020,53(7):736-744.
LIU C W, XU T S, LI T, et al. Simulation and optimization of heavy truck ride comfort based on a human-vehicle coupling dynamics model[J]. Journal of Tianjin University (Science and Technology), 2020, 53(7): 736-744.
|
|
|
| [24] |
王超星,王殿君,陈亚,等.六轮全地形移动机器人越障性能分析与仿真[J].制造业自动化,2016,38(12):72-77. doi:10.3969/j.issn.1009-0134.2016.12.018
WANG C X, WANG D J, CHEN Y, et al. Obstacle negotiation performance analysis and simulation for six wheel all-terrain mobile robot[J]. Manufacturing Automation, 2016, 38(12): 72-77.
doi: 10.3969/j.issn.1009-0134.2016.12.018
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|