| Robotic and Mechanism Design |
|


|
|
|
| Design and analysis of small land-air deformable amphibious robot |
Zhan YANG1( ),Qipeng LI1(),Wei TANG2(),Kecheng QIN2,Suifan CHEN1,Kaidi WANG1,Yang LIU3,Jun ZOU2 ),Qipeng LI1(),Wei TANG2(),Kecheng QIN2,Suifan CHEN1,Kaidi WANG1,Yang LIU3,Jun ZOU2 |
1.School of Mechanical and Energy Engineering, Zhejiang University of Science and Technology, Hangzhou 310023, China
2.State Key Laboratory of Fluid Power and Mechatronic Systems, Zhejiang University, Hangzhou 310027, China
3.School of Mechanical Engineering, Anhui University of Science and Technology, Huainan 232001, China |
|
|
|
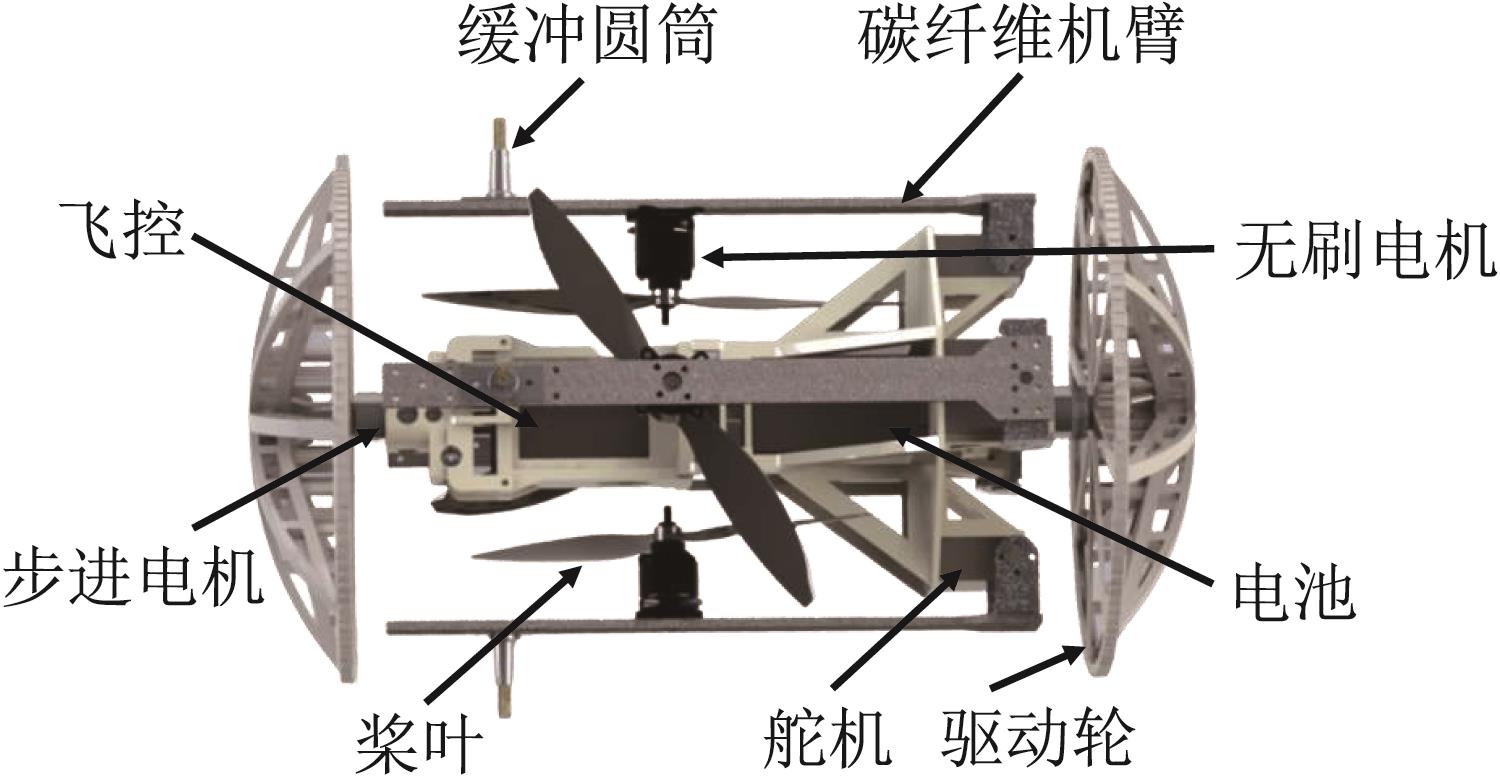
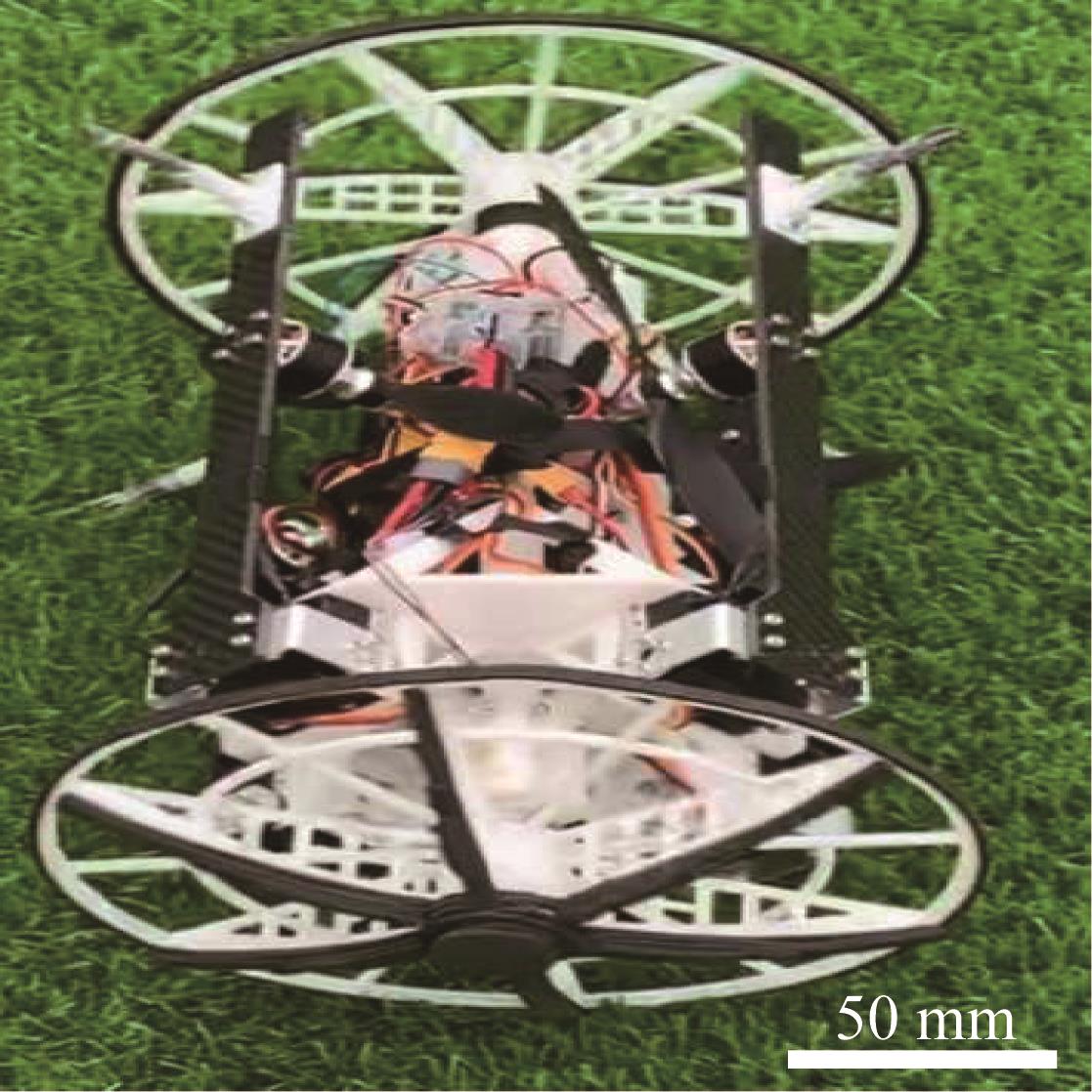
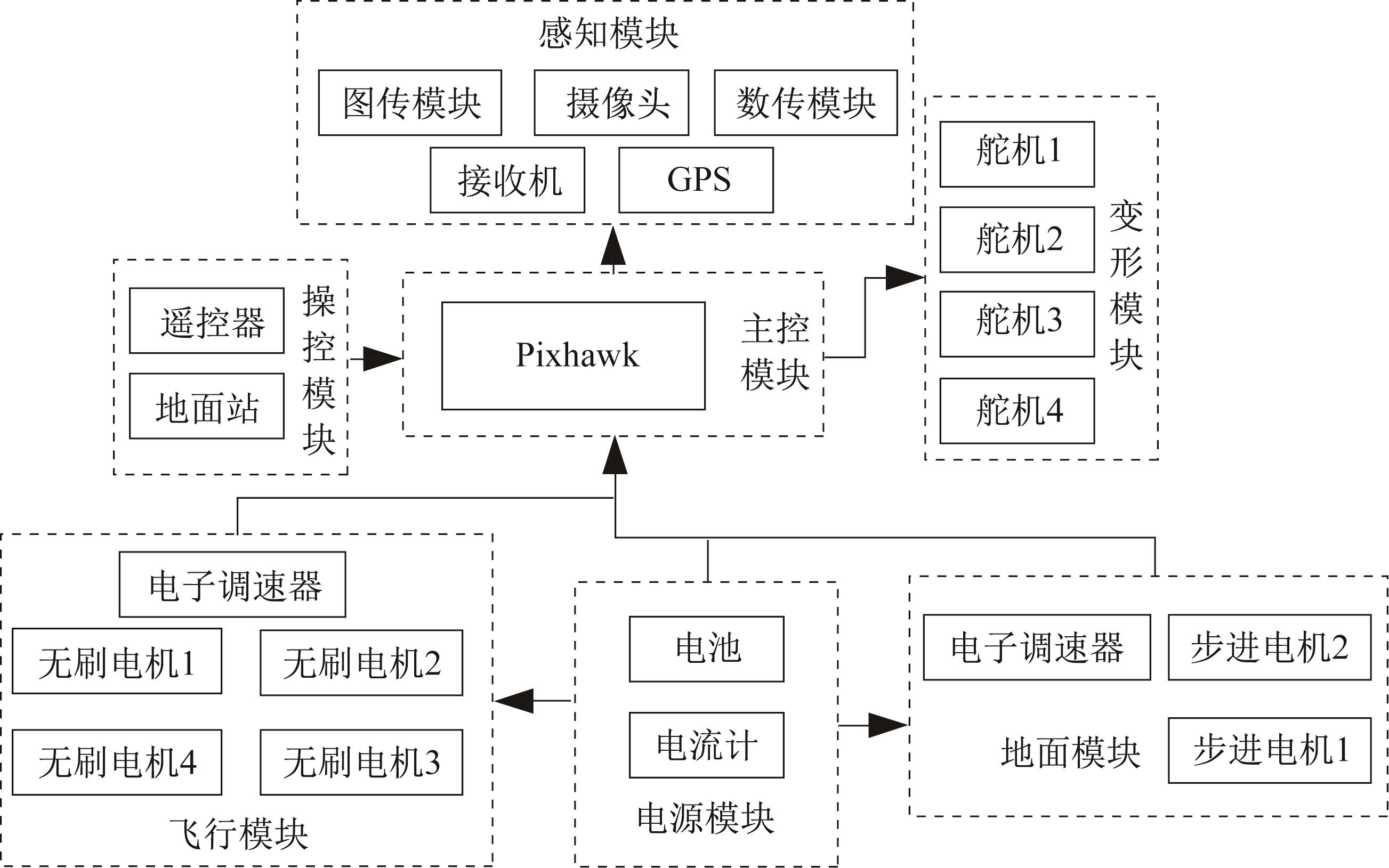
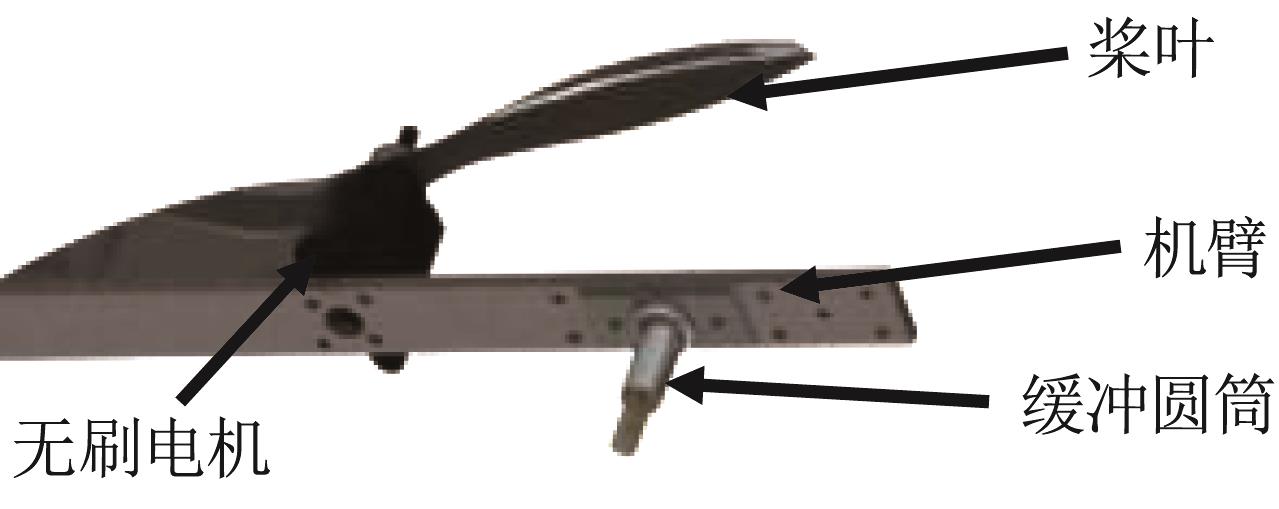
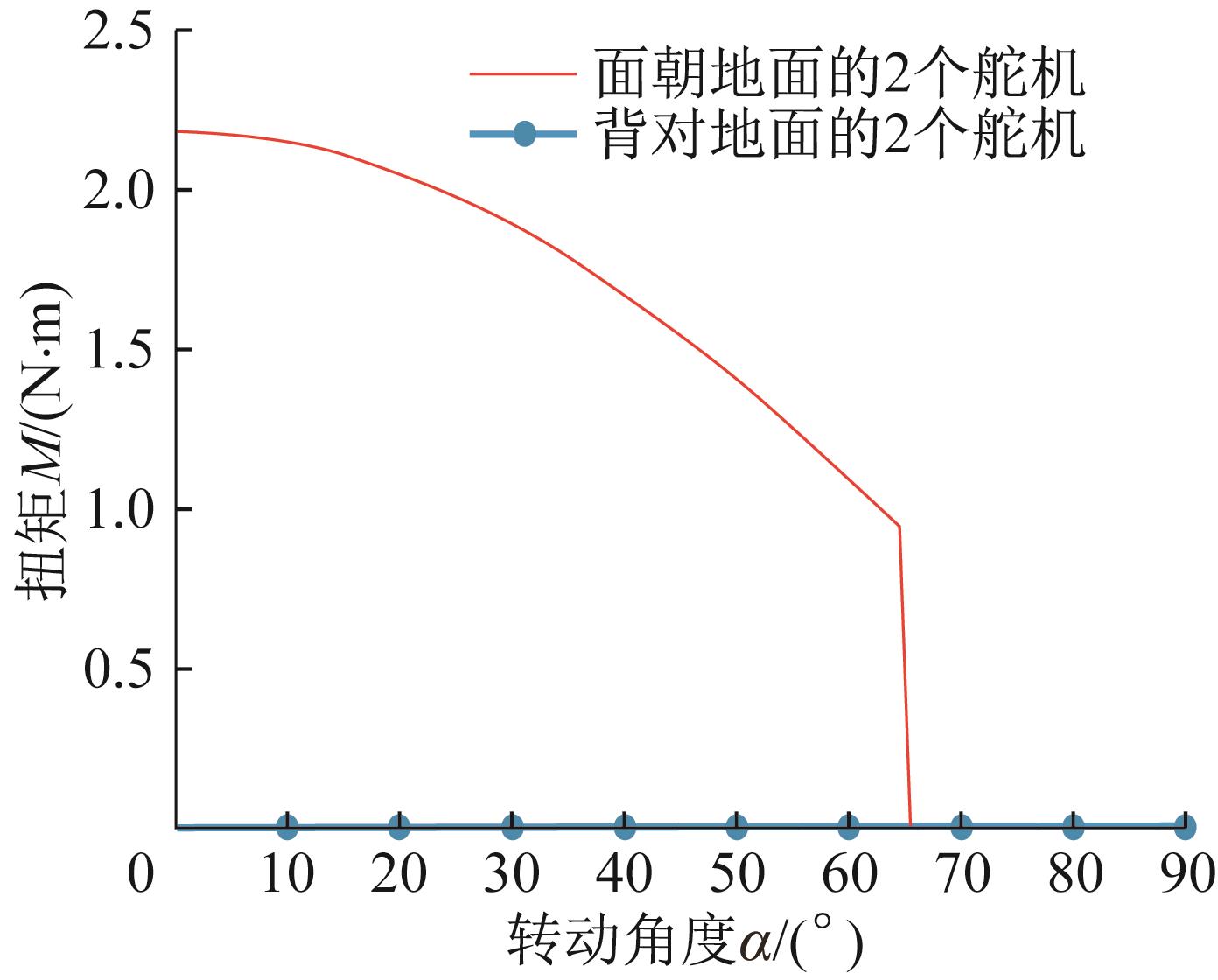
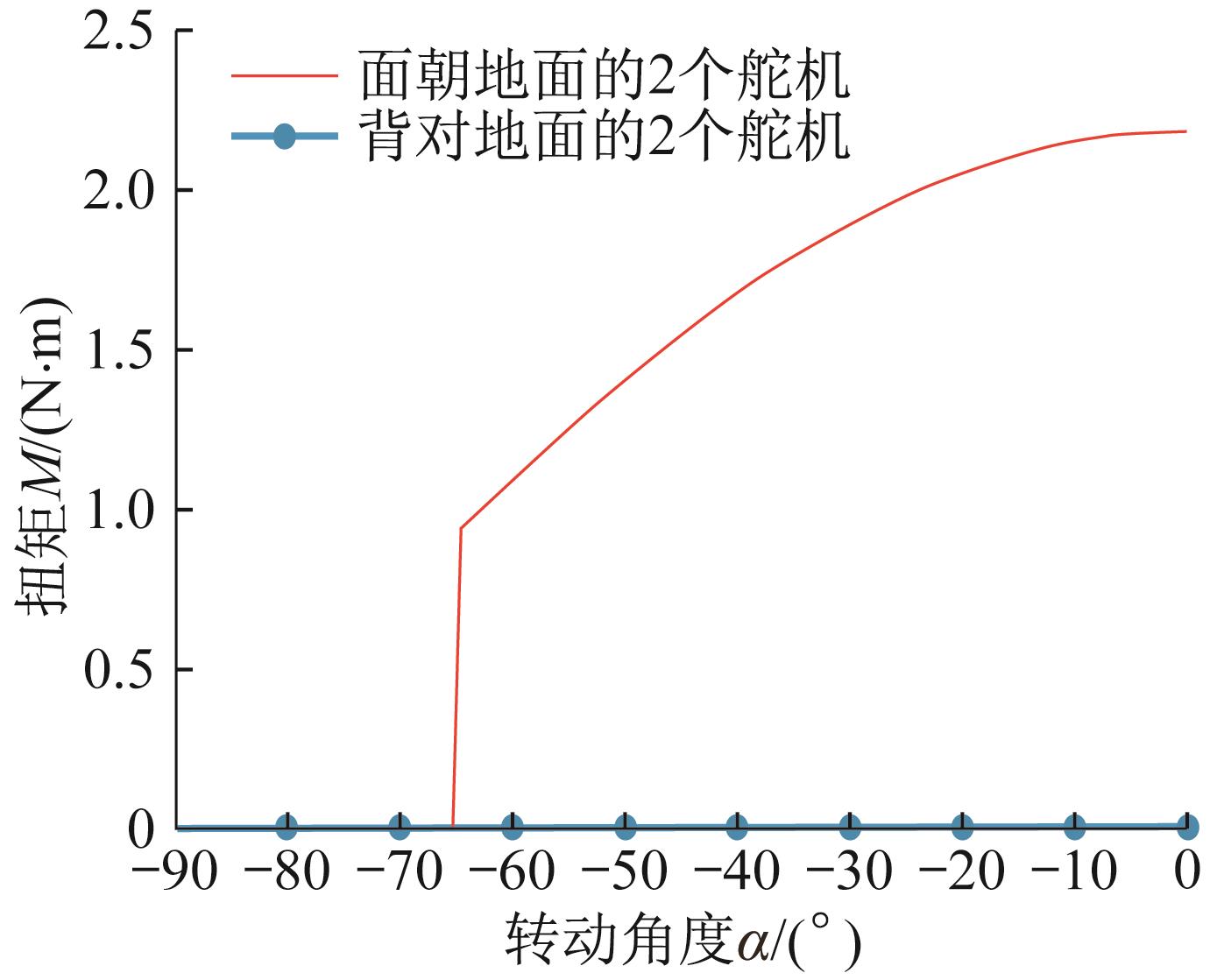
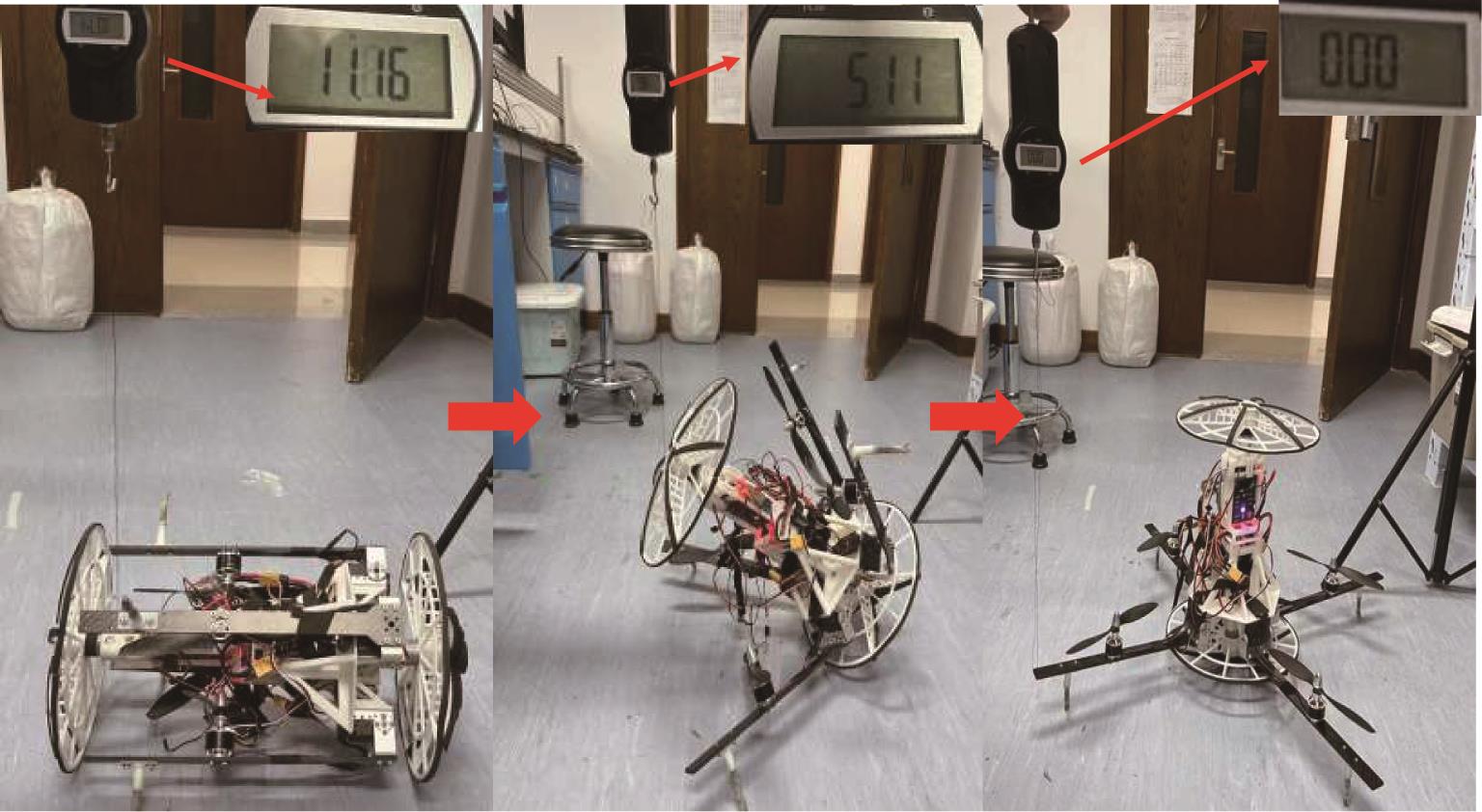
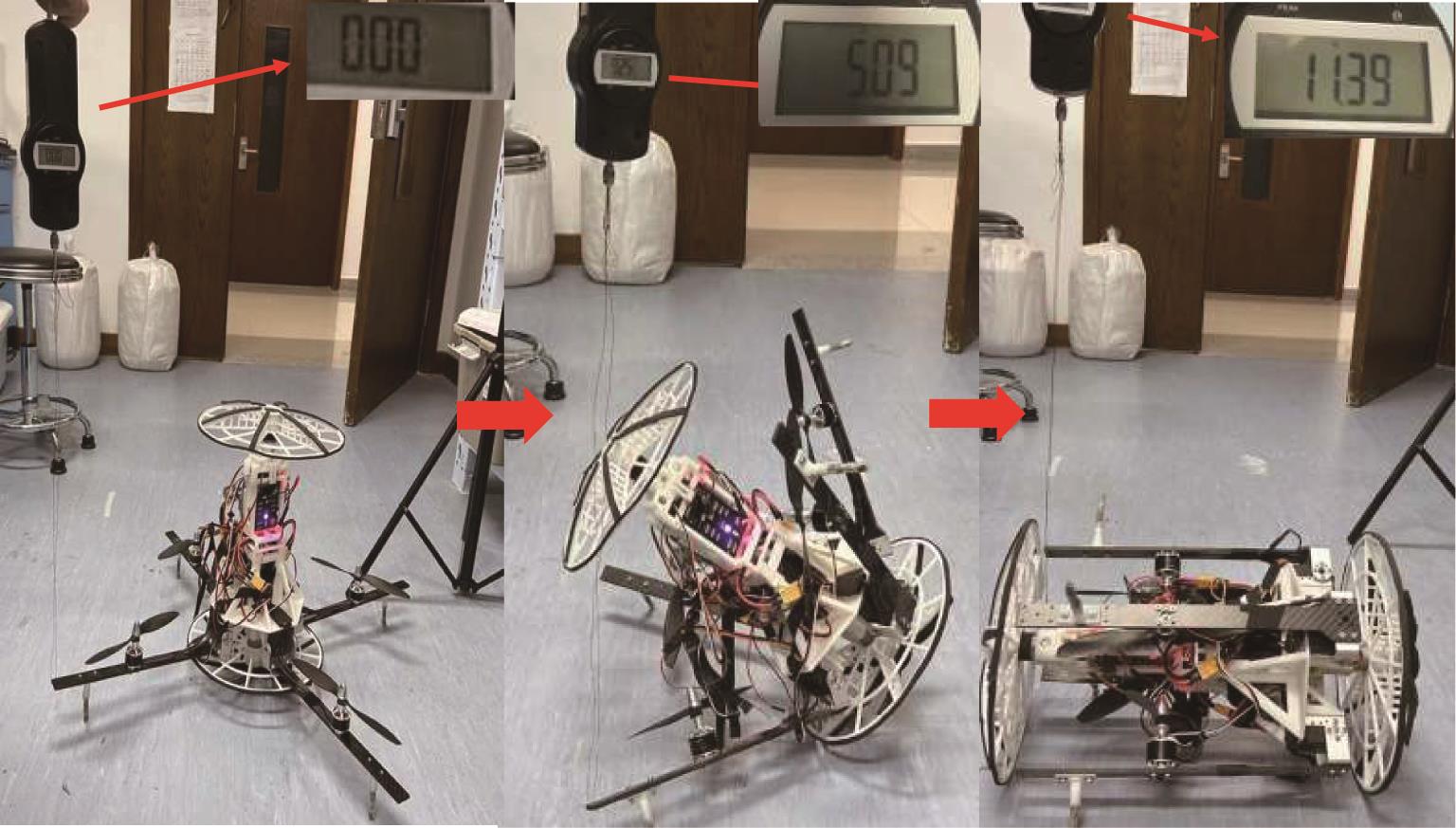
Abstract Multi-functional small robots have broad application prospects. To meet different operational requirements, a small land-air deformable amphibious robot was designed, which could achieve efficient ground movement and avoid obstacles through takeoff flight. The robot adopted a dual-mode design, in which the ground mode adopted a two-wheel drive motion design, and the airplane mode adopted a four-rotor flight design. The switching between the two modes was realized through the support and extension of the robot tilting mechanism. In order to verify the motion performance of the robot, the whole robot model was established by SolidWorks software, the kinematics modeling for the robot was carried out, and the kinematics equation of the robot mode switching process was derived. Then, the robot servo output was simulated by MATLAB and the robot prototype mode switching experiment was carried out. The simulation results of the output torque were basically consistent with the measured results, with a range of 0-250 N·cm. Finally, the robot prototype was used to conduct ground movement and air flight tests, and its motion process was analyzed to verify the stability of the land-air motion and mode switching of the robot. The research results verify the effectiveness of the designed robot, and it has a long endurance, which can provide a reference for the design of land-air amphibious robots.
|
|
Received: 08 February 2023
Published: 06 July 2023
|
|
|
|
Corresponding Authors:
Qipeng LI,Wei TANG
E-mail: 402997860@qq.com;liqipeng@zust.edu.cn;weitang@zju.edu.cn
|
小型陆空变形两栖机器人的设计与分析
多功能小型机器人具有广阔的应用前景。为满足不同的作业需求,设计了一种小型陆空变形两栖机器人,其既可以实现高效的地面移动,又能通过升空飞行来避开障碍物。该机器人采用双模式设计,地面模式采用两轮驱动的运动设计,飞行模式采用四旋翼飞行设计,2种模式的切换通过机器人倾转机构的支撑、伸展来实现。为了验证机器人的运动性能,首先采用SolidWorks软件建立了机器人整机模型,并对机器人进行运动学建模,推导得到了机器人模式切换过程的运动学方程。然后,对机器人舵机输出进行MATLAB仿真和开展机器人物理样机模式切换实验,得到的输出扭矩仿真结果与实测结果基本一致,其范围为0~250 。最后,利用机器人物理样机开展地面移动和空中飞行测试,并对其运动过程进行分析,以验证机器人陆空运动及模式切换的稳定性。研究结果验证了所设计机器人的有效性,且其具有较长的续航时间,可为陆空两栖机器人的设计提供参考。
关键词:
两栖机器人,
两轮驱动,
运动学建模,
稳定性
|
|
| [1] |
杨斌,何玉庆,韩建达,等.作业型飞行机器人研究现状与展望[J].机器人,2015,37(5):628-640. doi:10.13973/j.cnki.robot.2015.0628
YANG B, HE Y Q, HAN J D, et al. Survey on aerial manipulator systems[J]. Robot, 2015, 37(5): 628-640.
doi: 10.13973/j.cnki.robot.2015.0628
|
|
|
| [2] |
XU H, YANG Z, CHANG L, et al. ARSS: a novel aerial robot performs tree pruning tasks[J]. Discrete Dynamics in Nature and Society, 2020, 2020: 8883655. doi:10.1155/2020/8883655
doi: 10.1155/2020/8883655
|
|
|
| [3] |
MICHAEL N, SHEN S, MOHTA K, et al. Collaborative mapping of an earthquake damaged building via ground and aerial robots[J]. Journal of Field Robotics, 2012, 29(5): 832-841.
|
|
|
| [4] |
钱善华,葛世荣,王永胜,等.救灾机器人的研究现状与煤矿救灾的应用[J].机器人,2006,28(3):350-354. doi:10.13973/j.cnki.robot.2006.03.021
QIAN S H, GE S R, WANG Y S, et al. Research status of the disaster rescue robot and its applications to the mine rescue[J]. Robot, 2006, 28(3): 350-354.
doi: 10.13973/j.cnki.robot.2006.03.021
|
|
|
| [5] |
刘超,谭稀岑,姚燕安,等.一种新型可变形轮腿式机器人的设计与分析[J].机械工程学报,2022,58(3):65-74. doi:10.3901/jme.2022.03.065
LIU C, TAN X C, YAO Y A, et al. Design and analysis of a novel deformable wheel-legged robot[J]. Journal of Mechanical Engineering, 2022, 58(3): 65-74.
doi: 10.3901/jme.2022.03.065
|
|
|
| [6] |
LI K L, HAN B L, ZHAO Y T, et al. Motion planning and simulation of combined land-air amphibious robot[J]. IOP Conference Series: Materials Science and Engineering, 2018, 428: 012057. doi:10.1088/1757-899X/428/1/012057
doi: 10.1088/1757-899X/428/1/012057
|
|
|
| [7] |
朱航,施家栋,王建中,等.微小型陆空两栖机器人地面移动控制方法[J].现代电子技术,2015,38(8):54-57,61. doi:10.16652/j.issn.1004-373x.2015.08.043
ZHU H, SHI J D, WANG J Z, et al. Terrestrial locomotion control method of miniature land-air hybrid robot[J]. Modern Electronics Technique, 2015, 38(8): 54-57, 61.
doi: 10.16652/j.issn.1004-373x.2015.08.043
|
|
|
| [8] |
LATSCHA S, KOFRON M, STROFFOLINO A, et al. Design of a hybrid exploration robot for air and land deployment (H.E.R.A.L.D) for urban search and rescue applications[C]//2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, Sep. 14-18, 2014. doi:10.1109/IROS.2014.6942808
doi: 10.1109/IROS.2014.6942808
|
|
|
| [9] |
WANG H, SHI J D, WANG J Z, et al. Design and modeling of a novel transformable land/air robot[J]. International Journal of Aerospace Engineering, 2019, 2019: 2064131. doi:10.1155/2019/2064131
doi: 10.1155/2019/2064131
|
|
|
| [10] |
洪向共,钟地长,赵庆敏.基于多传感器融合的陆空两栖机器人移动控制系统设计[J].科学技术与工程,2020,20(8):3103-3108. doi:10.3969/j.issn.1671-1815.2020.08.024
HONG X G, ZHONG D C, ZHAO Q M. Design of mobile control system for air-ground amphibious robot based on multi-sensor fusion[J]. Science Technology and Engineering, 2020, 20(8): 3103-3108.
doi: 10.3969/j.issn.1671-1815.2020.08.024
|
|
|
| [11] |
LI B B, MA L, WANG D, et al. Driving and tilt-hovering: an agile and manoeuvrable aerial vehicle with tiltable rotors[J]. IET Cyber-Systems and Robotics, 2021, 3(2): 103-115. doi:10.1049/csy2.12014
doi: 10.1049/csy2.12014
|
|
|
| [12] |
王正杰,马建,朱航,等.陆空两栖机器人飞行控制系统设计[J].北京理工大学学报,2015,35(12):1257-1261. doi:10.15918/j.tbit1001-0645.2015.12.009
WANG Z J, MA J, ZHU H, et al. Control of an air-ground amphibious vehicle flight system[J]. Transactions of Beijing Institute of Technology, 2015, 35(12): 1257-1261.
doi: 10.15918/j.tbit1001-0645.2015.12.009
|
|
|
| [13] |
雷涛,徐康,汪首坤,等.并联六轮腿机器人机身平稳性控制方法研究[J].机械工程学报,2021,57(21):34-44. doi:10.3901/jme.2021.21.034
LEI T, XU K, WANG S K, et al. Research on stability control method of parallel six-wheel-legged robot[J]. Journal of Mechanical Engineering, 2021, 57(21): 34-44.
doi: 10.3901/jme.2021.21.034
|
|
|
| [14] |
郑耀,张继发,宋晓啸,等.可变形飞行器快速总体设计方法研究与算法实现[J].导弹与航天运载技术,2022,8(6):51-56.
ZHENG Y, ZHANG J F, SONG X X, et al. Research and algorithm implementation of rapid overall design method for morphing aircraft[J]. Missiles and Space Vehicles, 2022, 8(6): 51-56.
|
|
|
| [15] |
POUNDS P, MAHONY R, CORKE P. Modelling and control of a large quadrotor robot[J]. Control Engineering Practice, 2010, 18(7): 691-699. doi:10.1016/j.conengprac. 2010.02.008
doi: 10.1016/j.conengprac. 2010.02.008
|
|
|
| [16] |
吴翰,王正平,周洲,等.多旋翼固定翼无人机多体动力学建模[J].西北工业大学学报,2019,37(5):928-934. doi:10.3969/j.issn.1000-2758.2019.05.010
WU H, WANG Z P, ZHOU Z, et al. Modeling and simulation for multi-rotor fixed-wing UAV based on multibody dynamics[J]. Journal of Northwestern Polytechnical University, 2019, 37(5): 928-934.
doi: 10.3969/j.issn.1000-2758.2019.05.010
|
|
|
| [17] |
杜明,赵燕飞,范书瑞,等.多旋翼飞行器建模与控制器设计[J].科学技术与工程,2021,21(17):7180-7186. doi:10.3969/j.issn.1671-1815.2021.17.029
DU M, ZHAO Y F, FAN S R, et al. Incident edge detection technology of sensor network for environment monitoring[J]. Science Technology and Engineering, 2021, 21(17): 7180-7186.
doi: 10.3969/j.issn.1671-1815.2021.17.029
|
|
|
| [18] |
武仲芝,王雷,马建平,等.基于系统架构的典型四旋翼无人机设计[J].计算机科学,2019,46(11A):575-579.
WU Z Z, WANG L, MA J P, et al. Design of typical quadrotor UAV based on system architecture[J]. Computer Science, 2019, 46(11A): 575-579.
|
|
|
| [19] |
杨洋,陈维芹,陈仁良.四旋翼倾转飞行器操纵冗余设计[J].南京航空航天大学学报,2020,52(2):255-263. doi:10.16356/j.1005-2615.2020.02.011 .
YANG Y, CHEN W Q, CHEN R L. Design of redundant manipulation for quad tilt rotor aircraft[J]. Journal of Nanjing University of Aeronautics and Astronautics, 2020, 52(2): 255-263.
doi: 10.16356/j.1005-2615.2020.02.011
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|