| Design for Quality |
|


|
|
|
| Research on trajectory tracking control of metallurgical industrial robot based on fuzzy iterative Q-learning |
Hui ZHANG1,2( ),Yong-fei ZHU1,Xue-fei LIU1,Xiang-rong XU1() ),Yong-fei ZHU1,Xue-fei LIU1,Xiang-rong XU1() |
1.School of Mechanical Engineering, Anhui University of Technology, Ma’anshan, 243032, China
2.School of Metallurgical Engineering, Anhui University of Technology, Ma’anshan, 243032, China |
|
|
|
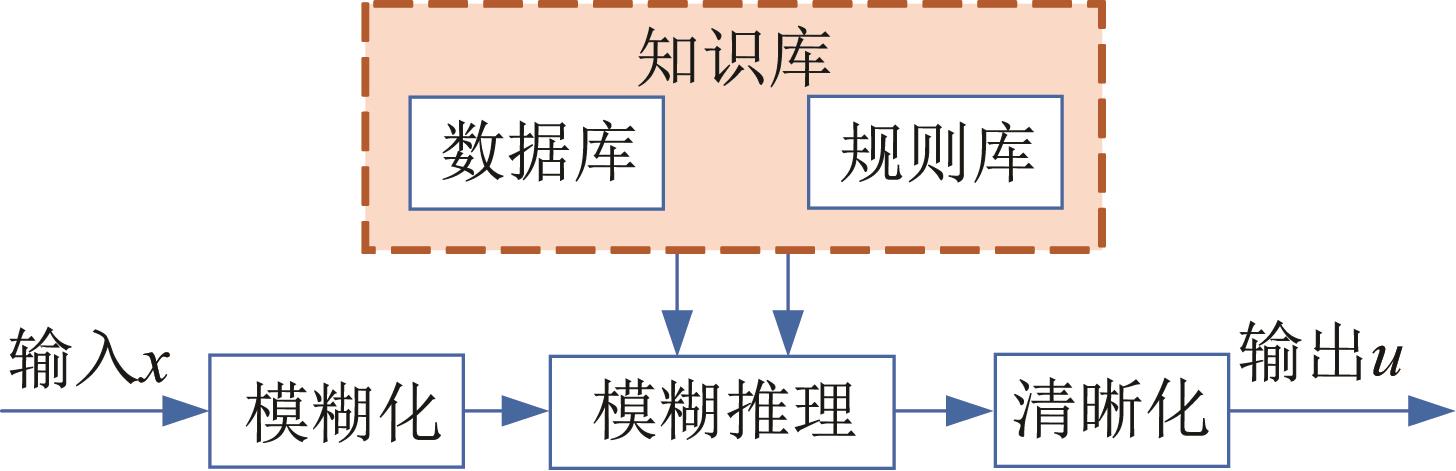
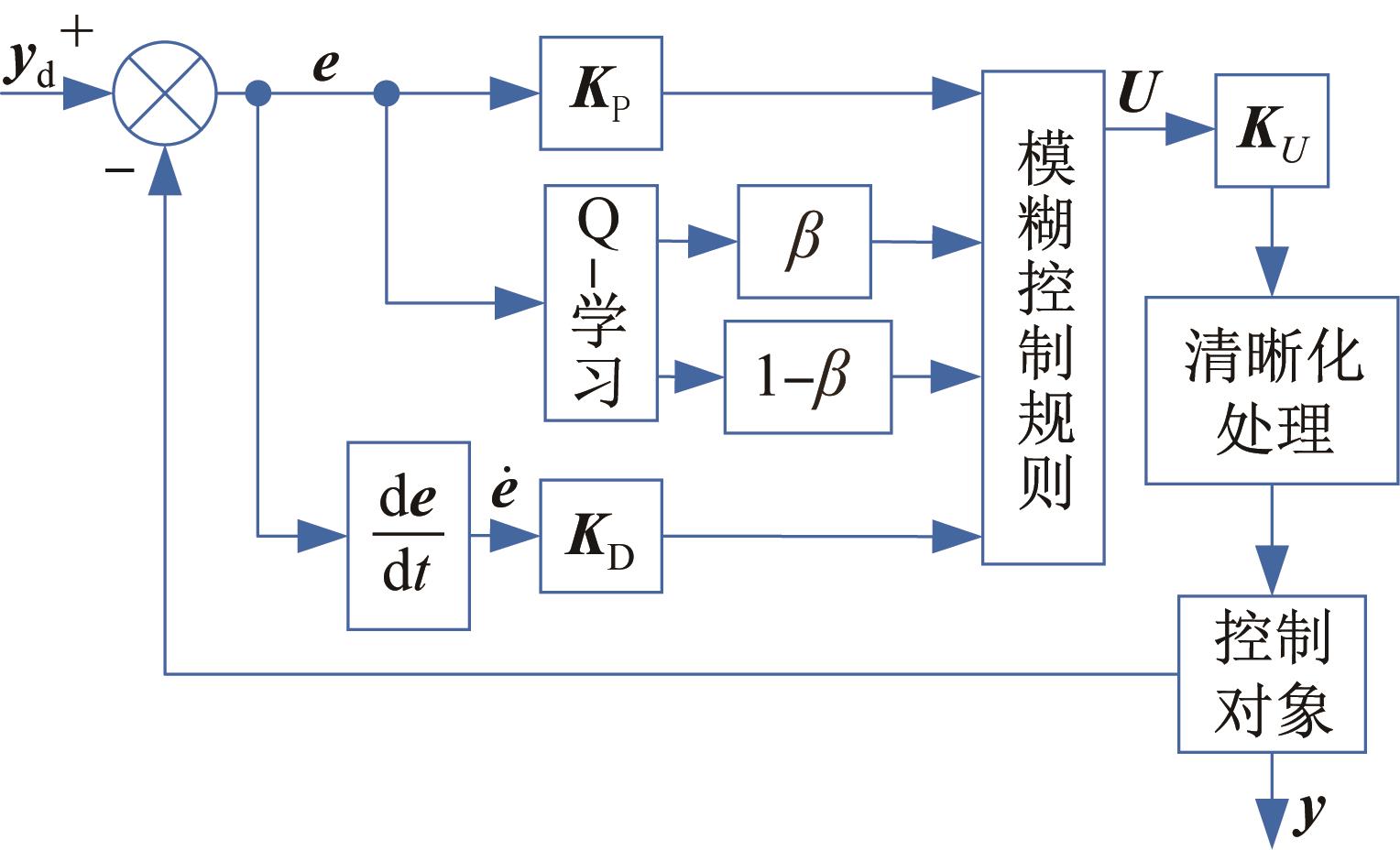
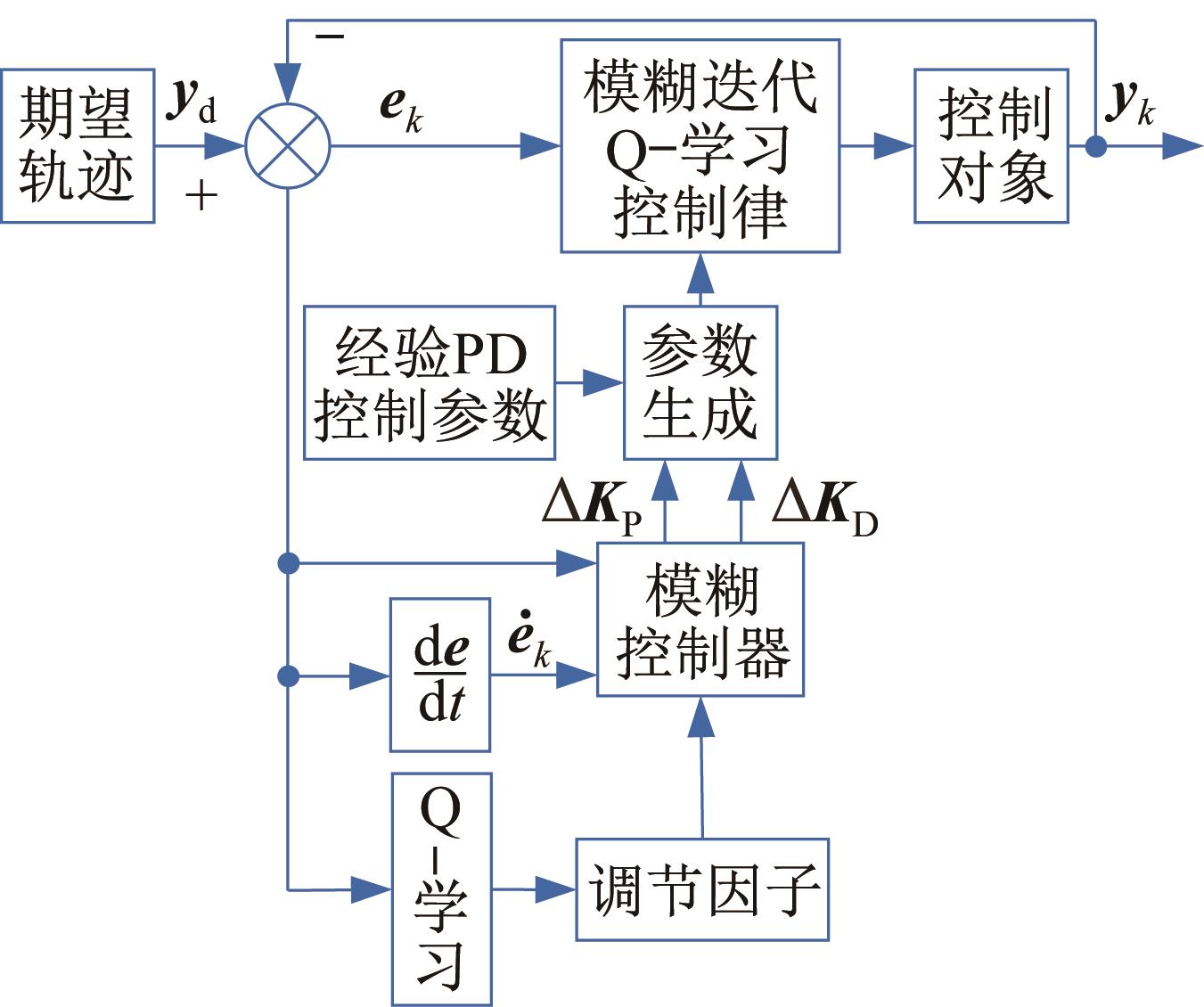
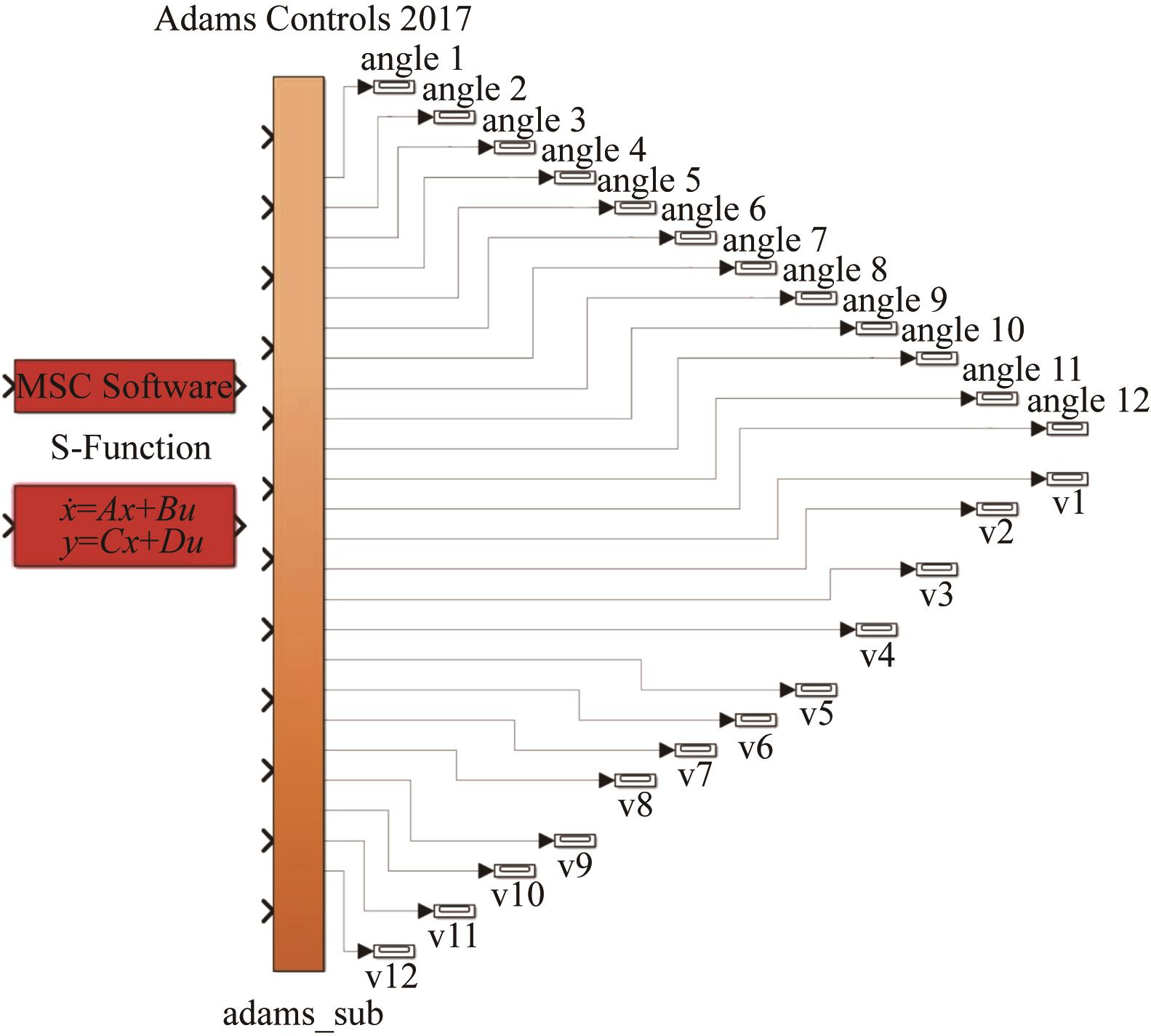
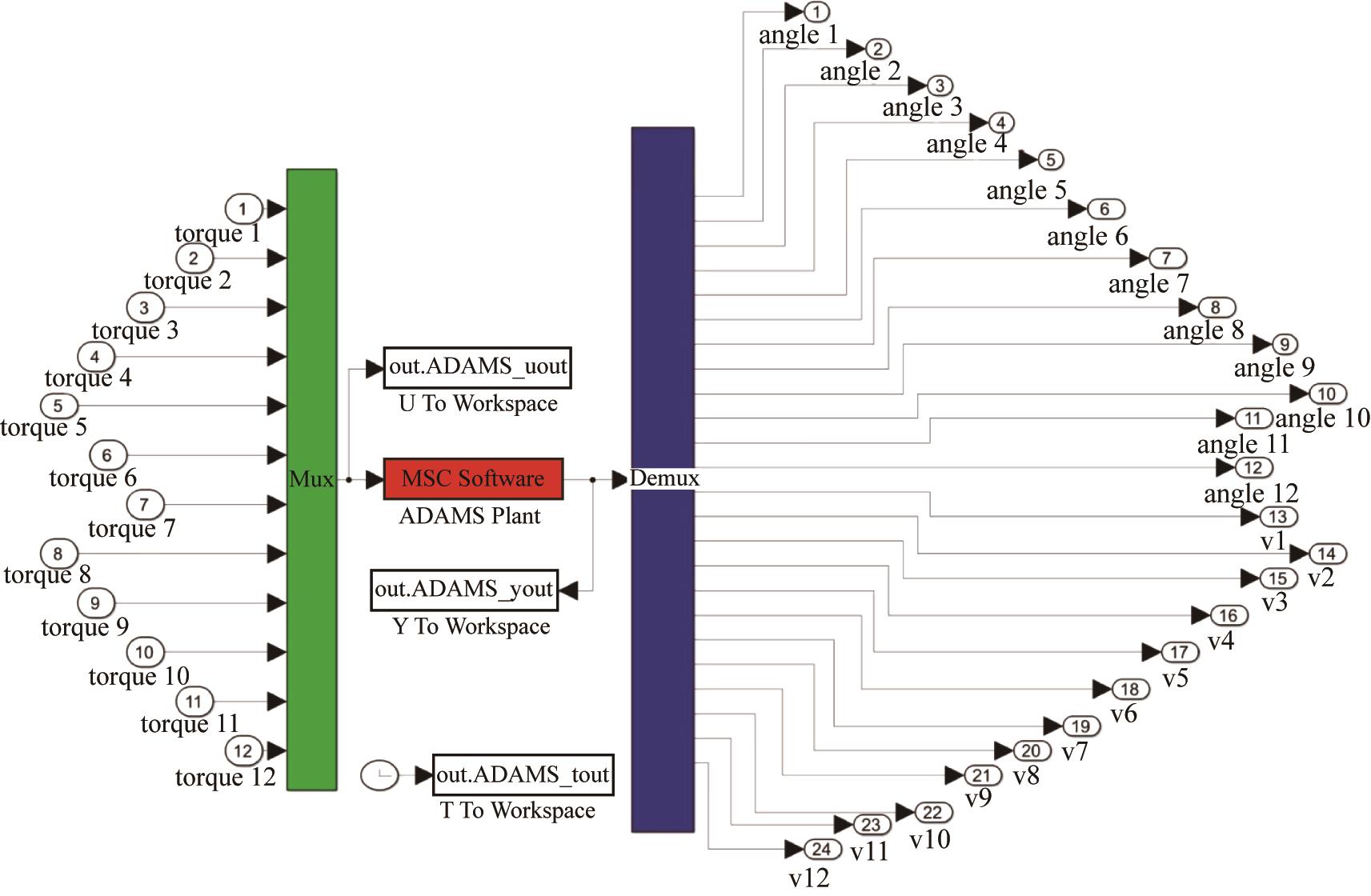
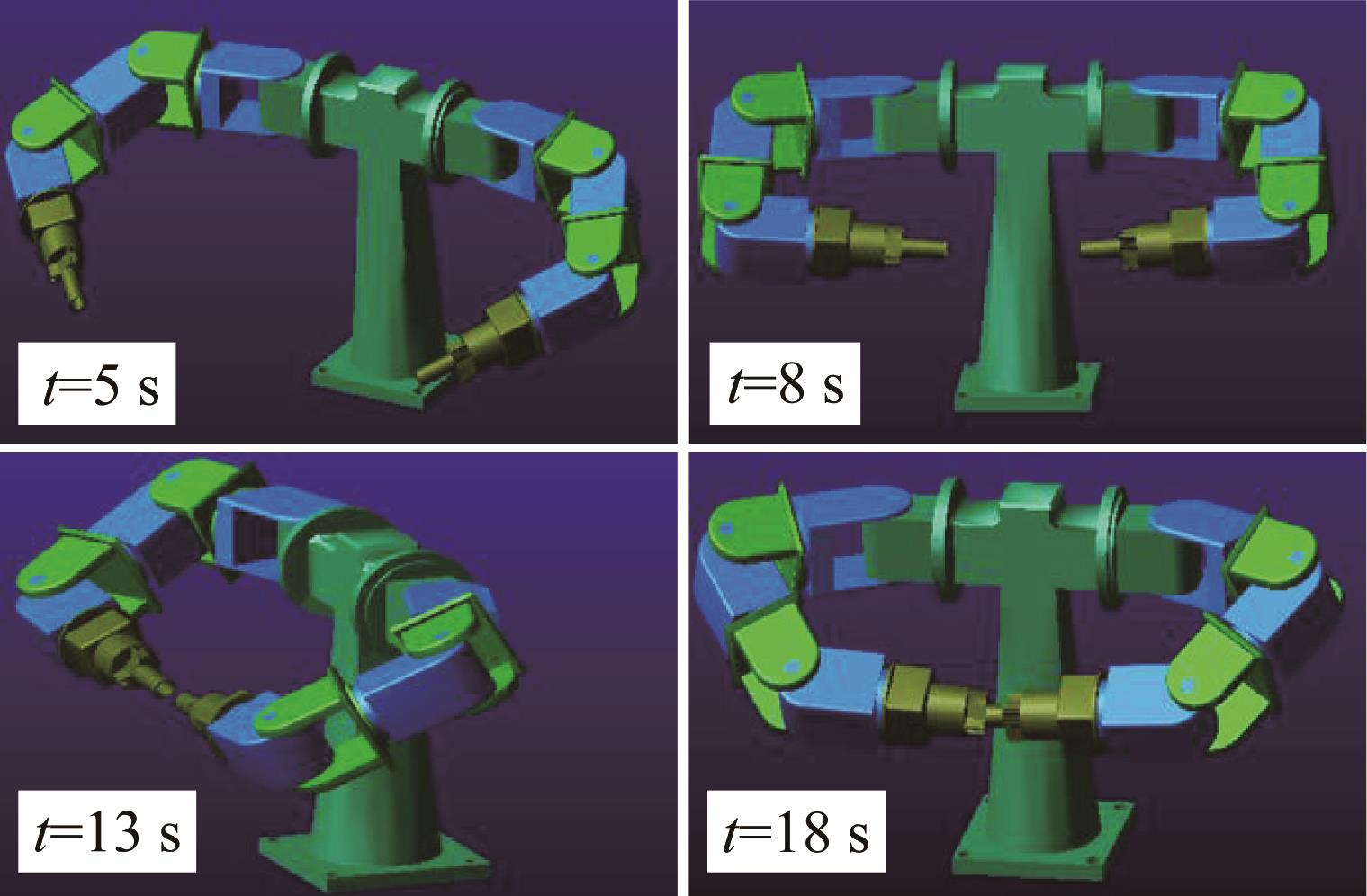
Abstract Metallurgical industrial robots play an increasingly irreplaceable role in modern industrial production. Due to the great improvement of industrial automation, people constantly put forward new requirements for the performance of metallurgical industrial robots, especially for the stability of them control system. In view of the problems of low trajectory tracking accuracy and lack of adaptive dynamic adjustment characteristics of metallurgical industrial robots, a fuzzy iterative Q-learning control algorithm was proposed. Taking 6-DOF (six-degree-of-freedom) dual-arm robot as the research object, the fuzzy control rules were compiled by using the Fuzzy toolbox and the position error and its change rate generated by the robot were taken as the input of the fuzzy controller, and then the quantization factor and scale factor in the fuzzy controller and the PD (proportional derivative) parameter in the iterative learning control was adjusted by introducing the Q-learning strategy, so as to complete the design of fuzzy iterative Q-learning controller. Then, combined with ADAMS (automatic dynamic analysis of mechanical systems) and MATLAB software, a 6-DOF dual-arm robot simulation platform was built to carry out the simulation of shaft hole assembly task with high-precision trajectory tracking. The simulation results showed that the 6-DOF dual-arm robot had high trajectory tracking accuracy in joint space, and could complete the coordinated assembly task of dual arm shaft holes, which verified the effectiveness and advancement of the proposed control algorithm. The research results can provide reference for the shaft hole assembly of dual-arm cooperative robot with high-precision trajectory tracking, and have certain practical application value.
|
|
Received: 14 February 2022
Published: 02 November 2022
|
|
|
|
Corresponding Authors:
Xiang-rong XU
E-mail: 3181@ahut.edu.cn;xuxr@ahut.edu.cn
|
基于模糊迭代Q-学习的冶金工业机器人轨迹跟踪控制研究
冶金工业机器人在现代工业生产中扮演着越来越不可替代的角色。由于工业自动化程度的大幅提升,人们对冶金工业机器人的性能也不断地提出新要求,尤其是对其控制系统的稳定性提出了更高的要求。针对目前冶金工业机器人轨迹跟踪精度较低且不具有自适应动态调节特性等问题,提出了一种模糊迭代Q-学习控制算法。以6-DOF(six degree-of-freedom,六自由度)双臂机器人为研究对象,利用Fuzzy工具箱编写模糊控制规则,以机器人产生的位置误差以及位置误差的变化率为模糊控制器的输入量,并引入Q-学习策略,以调整模糊控制器中的量化因子、比例因子以及迭代学习控制中的PD(proportional derivative,比例微分)参数,完成模糊迭代Q-学习控制器的设计。然后,联合ADAMS(automatic dynamic analysis of mechanical systems,机械系统动力学自动分析)和MATLAB软件搭建6-DOF双臂机器人仿真平台,开展高精度轨迹跟踪的轴孔装配任务模拟。仿真结果表明,6-DOF双臂机器人关节空间的轨迹跟踪精度较高,同时可以完成双臂轴孔协调装配任务,验证了所提出控制算法的有效性和先进性。研究结果可为双臂协作机器人实现高精度轨迹跟踪的轴孔装配提供参考,具有一定的实际应用价值。
关键词:
双臂机器人,
模糊控制,
迭代Q-学习控制,
轨迹跟踪,
轴孔装配
|
|
| [1] |
ZHANG Zhi-jun, LI Zhi-jun, ZHANG Yu-nong, et al. Neural-dynamic-method-based dual-arm CMG scheme with time-varying constraints applied to humanoid robots[J]. IEEE Transactions on Neural Networks and Learning Systems, 2015, 26(12): 3251-3262. doi:10.1109/TNNLS. 2015.2469147
doi: 10.1109/TNNLS. 2015.2469147
|
|
|
| [2] |
段晋军,甘亚辉,戴先中.双臂协调搬运过程中基于变阻抗模型的位置/力混合控制[J].机器人,2019,41(6): 795-802,812. doi:10.13973/j.cnki.robot.180705
DUAN Jin-jun, GAN Ya-hui, DAI Xian-zhong. The hybrid position/force control based on variable impedance model in the dual-arm coordinated transport[J]. Robot, 2019, 41(6): 795-802, 812.
doi: 10.13973/j.cnki.robot.180705
|
|
|
| [3] |
张建华,许晓林,刘璇,等.双臂协调机器人相对动力学建模[J].机械工程学报,2019,55(3):34-42. doi:10.3901/jme.2019.03.034
ZHANG Jian-hua, XU Xiao-lin, LIU Xuan, et al. Relative dynamic modeling of dual-arm coordination robot[J]. Journal of Mechanical Engineering, 2019, 55(3): 34-42.
doi: 10.3901/jme.2019.03.034
|
|
|
| [4] |
龙樟,李显涛,帅涛,等.工业机器人轨迹规划研究现状综述[J].机械科学与技术,2021,40(6):853-862. doi:10.13433/j.cnki.1003-8728.20200132
LONG Zhang, LI Xian-tao, SHUAI Tao, et al. Review of research state of trajectory planning for industrial robots[J]. Mechanical Science and Technology for Aerospace Engineering, 2021, 40(6): 853-862.
doi: 10.13433/j.cnki.1003-8728.20200132
|
|
|
| [5] |
王昕煜,平雪良.基于多传感器融合信息的移动机器人速度控制方法[J].工程设计学报,2021,28(1):63-71. doi:10.3785/j.issn.1006-754X.2021.00.013
WANG Xin-yu, PING Xue-liang. Speed control method of mobile robot based on multi-sensor fusion information[J]. Chinese Journal of Engineering Design, 2021, 28(1): 63-71.
doi: 10.3785/j.issn.1006-754X.2021.00.013
|
|
|
| [6] |
ALESSANDRO D L, BRUNO S, LOREDANA Z. PD control with on-line gravity compensation for robots with elastic joints: theory and experiments[J]. Automatica, 2005, 41(10): 1809-1819. doi:10.1016/j.automatica.2005.05.009
doi: 10.1016/j.automatica.2005.05.009
|
|
|
| [7] |
FLORIAN P, DOMINIC L, WERNER F, et al. Dynamic trajectory generation for serial elastic actuated robots[J]. IFAC Proceedings Volumes, 2012, 45(22): 636-643. doi:10.3182/20120905-3-HR-2030.00159
doi: 10.3182/20120905-3-HR-2030.00159
|
|
|
| [8] |
朱永飞,查文斌,周攀,等.6-DOF双臂机器人轨迹规划与动力学仿真[J].机械研究与应用,2020,33(1):187-191. doi:10.16576/j.cnki.1007-4414.2020.01.055
ZHU Yong-fei, ZHA Wen-bin, ZHOU Pan, et al. Trajectory planning and dynamics simulation of a 6-DOF dual-arm robot[J]. Mechanical Research & Application, 2020, 33(1): 187-191.
doi: 10.16576/j.cnki.1007-4414.2020.01.055
|
|
|
| [9] |
刘雪飞,徐向荣,查文斌,等.一种零空间避障的机械臂末端轨迹跟踪算法[J].机械科学与技术,2021,40(7): 1009-1015. doi:10.13433/j.cnki.1003-8728.20200457
LIU Xue-fei, XU Xiang-rong, ZHA Wen-bin, et al. A trajectory tracking algorithm of null space obstacle avoidance for end-effector of manipulators[J]. Mechanical Science and Technology for Aerospace Engineering, 2021, 40(7): 1009-1015.
doi: 10.13433/j.cnki.1003-8728.20200457
|
|
|
| [10] |
ZHONG Yu-guang, YANG Fan. Dynamic modeling and adaptive fuzzy sliding mode control for multi-link underwater manipulators[J]. Ocean Engineering, 2019, 187(9): 1-11. doi:10.1016/j.oceaneng.2019.106202
doi: 10.1016/j.oceaneng.2019.106202
|
|
|
| [11] |
Ji-chang LO, LIN Cheng-wei. Polynomial fuzzy observed-state feedback stabilization via homogeneous Lyapunov methods[J]. IEEE Transactions Fuzzy Systems, 2018, 26(5): 2873-2885. doi:10.1109/TFUZZ.2017.2786211
doi: 10.1109/TFUZZ.2017.2786211
|
|
|
| [12] |
李德昀,徐德刚,桂卫华.基于时间延时估计和自适应模糊滑模控制器的双机械臂协同阻抗控制[J].控制与决策, 2021,36(6):1311-1323. doi:10.13195/j.kzyjc.2019.1701
LI De-yun, XU De-gang, GUI Wei-hua. Coordinated impedance control for dual-arm robots based on time delay estimation and adaptive fuzzy sliding mode controller[J]. Control and Decision, 2021, 36(6): 1311-1323.
doi: 10.13195/j.kzyjc.2019.1701
|
|
|
| [13] |
CHEN Yu-jen, JU Ming-yu, HWANG Kao-Shing. A virtual torque-based approach to kinematic control of redundant manipulators[J]. IEEE Transactions on Industrial Electronics, 2017, 64(2): 1728-1736. doi:10.1109/TIE.2016.2548439
doi: 10.1109/TIE.2016.2548439
|
|
|
| [14] |
ZHA Wen-bin, XU Xiang-rong, CHEN Zhao-xing, et al. Manipulator tracking algorithm based on estimated dynamics and time-varying output constraint state[C]// 2021 6th IEEE International Conference on Advanced Robotics and Mechatronics(ICARM), Chongqing, Jul. 3-5, 2021. doi:10.1109/ICARM52023.2021.9536170
doi: 10.1109/ICARM52023.2021.9536170
|
|
|
| [15] |
段书用,李昌洛,韩旭,等.机械臂动力学分析及关节非线性摩擦模型建立[J].机械工程学报,2020,56(9):18-28. doi:10.3901/JME.2020.09.018
DUAN Shu-yong, LI Chang-luo, HAN Xu, et al. Forward-inverse dynamics analysis of robot arm trajectories and development of a nonlinear friction model for robot joints[J]. Journal of Mechanical Engineering, 2020, 56(9): 18-28.
doi: 10.3901/JME.2020.09.018
|
|
|
| [16] |
李仁俊,韩正之.迭代学习控制综述[J].控制与决策,2005,20(9):961-966. doi:10.13195/j.cd.2005.09.3.lirj.001
LI Ren-jun, HAN Zheng-zhi. Survey of iterative learning control[J]. Control and Decision, 2005, 20(9): 961-966.
doi: 10.13195/j.cd.2005.09.3.lirj.001
|
|
|
| [17] |
ANDREA M Z, ANDREA C, LUIGI P, et al. Prediction of human activity patterns for human-robot collaborative assembly tasks[J]. IEEE Transactions on Industrial Informatics, 2019, 15(7): 3934-3942. doi:10.1109/TII. 2018.2882741
doi: 10.1109/TII. 2018.2882741
|
|
|
| [18] |
CHEN Bing, LIU Xiao-ping, LIU Ke-fu, et al. Direct adaptive fuzzy control of nonlinear strict-feedback systems[J]. Automatica, 2009, 45(6): 1530-1535. doi:10.1016/j.automatica.2009.02.025
doi: 10.1016/j.automatica.2009.02.025
|
|
|
| [19] |
PRECUP R E, HELLENDOORN H. A survey on industrial applications of fuzzy control[J]. Computers in Industry, 2011, 62(3): 213-226. doi:10.1016/j.automatica.2009.02.025
doi: 10.1016/j.automatica.2009.02.025
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|