| Mechanical Optimization Design |
|


|
|
|
| Sliding mode trajectory tracking control of manipulator based on adaptive neural network |
Qiqi LI1( ),Xiangrong XU1(),Hui ZHANG1,2 ),Xiangrong XU1(),Hui ZHANG1,2 |
1.School of Mechanical Engineering, Anhui University of Technology, Maanshan 243032, China
2.School of Metallurgical Engineering, Anhui University of Technology, Maanshan 243032, China |
|
|
|
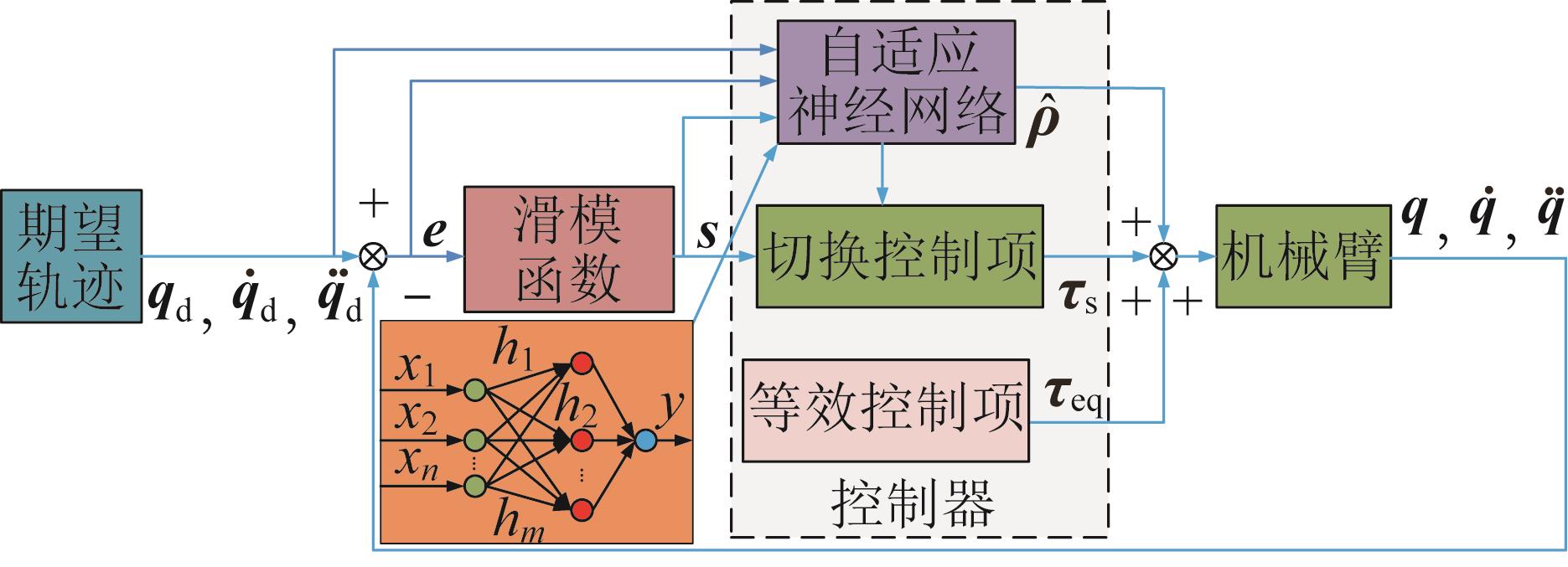
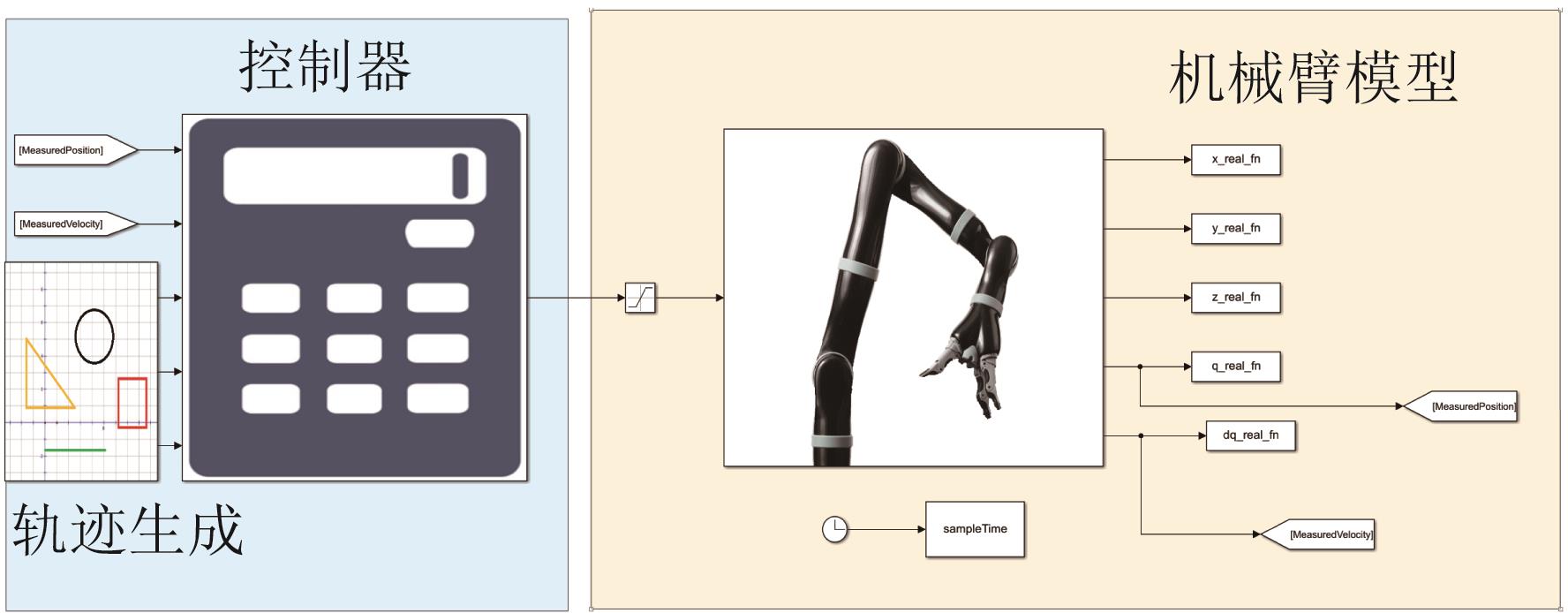
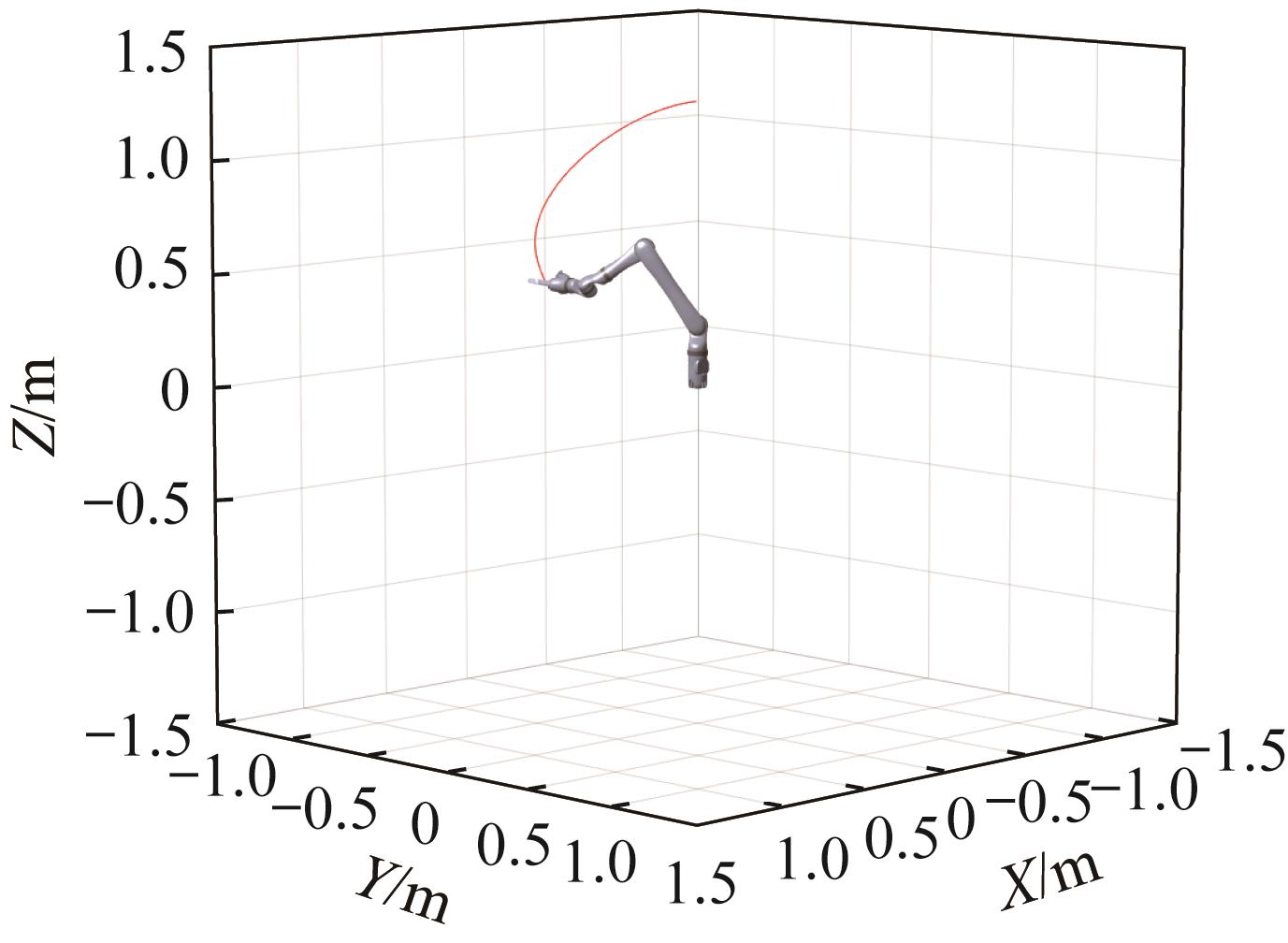
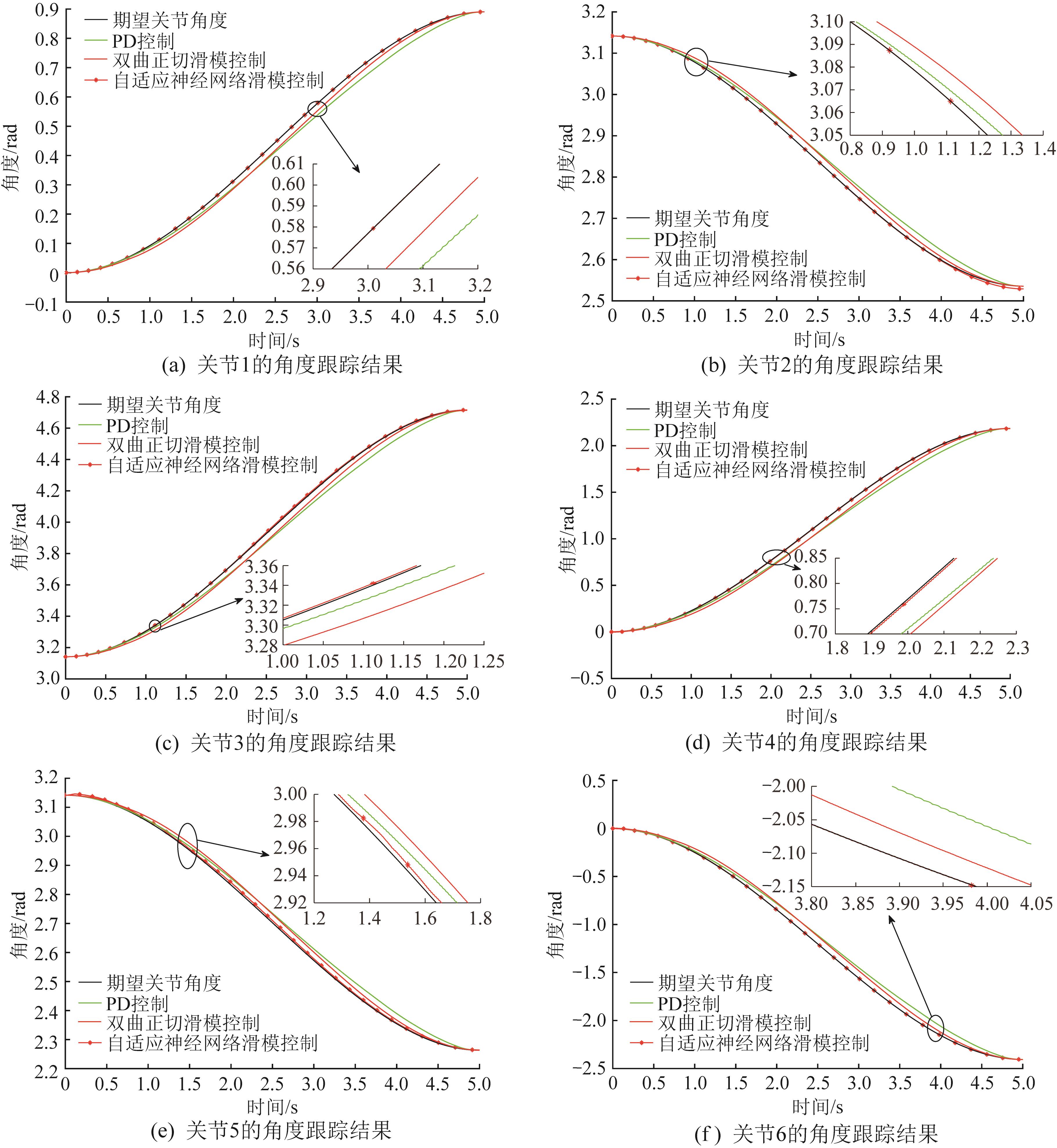
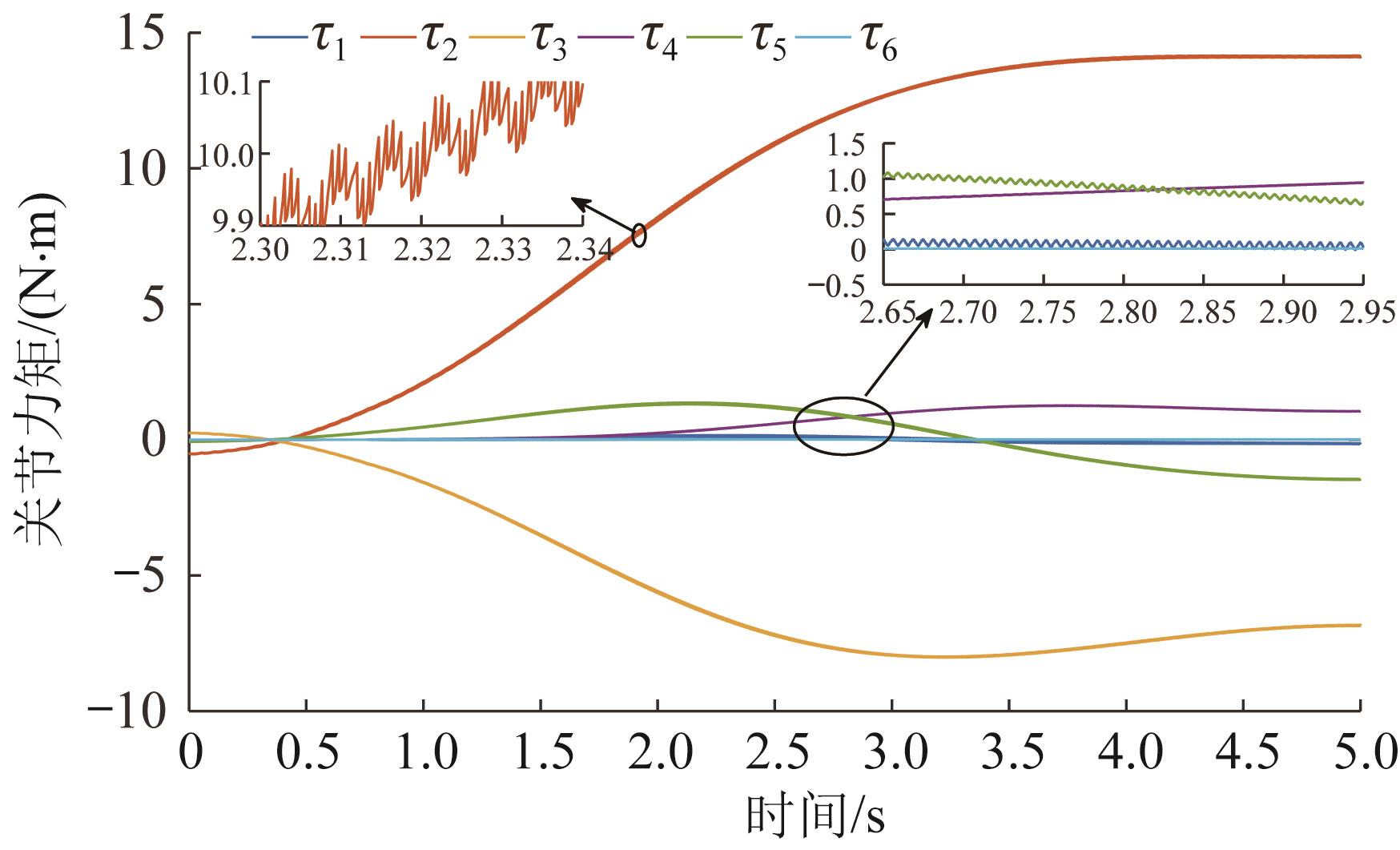
Abstract In view of the adverse effects of dynamic modeling errors and uncertain perturbations on the high-precision trajectory tracking control of the end of manipulators, a novel sliding mode control strategy for manipulators based on the adaptive neural network was proposed. The control strategy could be divided into three parts: adaptive neural network compensation term, switching control term and equivalent control term. The introduction of adaptive neural network avoided the influence of modeling error and unknown external disturbance on the manipulator system, and improved the trajectory tracking accuracy. The switching control term could enable the manipulator system performance to quickly approach the sliding mode surface while approaching the equilibrium point at a very small rate, so as to ensure system stability while avoiding excessive chattering. The equivalent control term was used to compensate the gravity term and Coriolis force term of the manipulator dynamics model, which realized the linearization of the model and ensured the system control accuracy. Finally, the stability of the designed control system was proved by constructing the Lyapunov function, and the simulation experiment and comparison experiment were carried out in MATLAB/Simulink environment and robot system toolbox. The results showed that the proposed control algorithm could achieve high-precision trajectory tracking while maintaining the stability of the manipulator, which verified the correctness and superiority of this control algorithm. The adaptive neural network sliding mode control algorithm provides a solution for enhancing the trajectory tracking accuracy of the end of manipulators.
|
|
Received: 23 December 2022
Published: 04 September 2023
|
|
|
|
Corresponding Authors:
Xiangrong XU
E-mail: 13637099782@163.com;xuxr@ahut.edu.cn
|
基于自适应神经网络的机械臂滑模轨迹跟踪控制
针对动态建模误差和不确定性扰动对机械臂末端高精度轨迹跟踪控制的不利影响,提出了一种新型的基于自适应神经网络的机械臂滑模控制策略。该控制策略可分为三部分:自适应神经网络补偿项、切换控制项和等效控制项。自适应神经网络的引入,避免了建模误差和外界未知扰动对机械臂系统的影响,提高了轨迹跟踪精度;切换控制项可使机械臂系统性能在迅速趋近滑模面的同时以很小的速率趋近平衡点,既能保证系统稳定,又能避免系统过于抖振;等效控制项用于对机械臂动力学模型的重力项和哥氏力项进行补偿,实现对模型的线性化处理,保证了系统的控制精度。最后,通过构造Lyapunov函数验证了所设计控制系统的稳定性,并在MATLAB/Simulink环境下和机器人系统工具箱中开展仿真实验和对比实验。结果表明,所提出的控制算法能够在保持机械臂稳定性的同时实现高精度的轨迹跟踪,验证了该控制算法的有效性和优越性。自适应神经网络滑模控制算法可为提高机械臂末端轨迹跟踪精度提供一种解决方案。
关键词:
机械臂,
高精度,
轨迹跟踪,
自适应神经网络
|
|
| [1] |
PIZARRO-LERMA A O, GARCIA-HERNANDEZ R, SANTIBANEZ V, et al. Experimental evaluation of a sectorial fuzzy controller plus adaptive neural network compensation applied to a 2-DOF robot manipulator[J]. IFAC-Papers OnLine, 2019, 52(29): 233-238.
|
|
|
| [2] |
CRUZ-ORTIZ D, CHAIREZ I, POZNYAK A. Adaptive sliding-mode trajectory tracking control for state constraint master‒slave manipulator systems[J]. ISA Transactions, 2022, 127: 273-282.
|
|
|
| [3] |
赵希梅,金鸿雁.永磁直线同步电机伺服系统的分段变论域模糊迭代学习控制[J].电工技术学报,2017,32(23):9-15.
ZHAO X M, JIN H Y. Segmented variable universe fuzzy iterative learning control for permanent magnet linear synchronous motor servo system[J]. Transactions of China Electrotechnical Society, 2017, 32(23): 9-15.
|
|
|
| [4] |
张润梅,夏旭,袁彬,等.多关节机械臂神经网络超螺旋滑模控制[J].兵器装备工程学报,2022,43(8):258-264. doi:10.11809/bqzbgcxb2022.08.040
ZHANG R M, XIA X, YUAN B, et al. Super-twisting sliding mode control of neural network for multi-joint manipulator[J]. Journal of Ordnance Equipment Engineering, 2022, 43(8): 258-264.
doi: 10.11809/bqzbgcxb2022.08.040
|
|
|
| [5] |
吴定会,肖仁,欧阳洪才,等.机械臂的改进固定时间滑模控制方法设计[J].机械科学与技术,2021,40(8):1171-1176.
WU D H, XIAO R, OUYANG H C, et al. Design of improved fixed time sliding mode control method for manipulator trajectory tracking[J]. Mechanical Science and Technology for Aerospace Engineering, 2021, 40(8): 1171-1176.
|
|
|
| [6] |
孟琪迪,南新元,张永兴.基于PD型迭代学习的机械臂轨迹跟踪控制[J].组合机床与自动化加工技术,2022(11):62-65,69.
MENG Q D, NAN X Y, ZHANG Y X. Trajectory tracking control of manipulator based on PD type iterative learning[J]. Modular Machine Tool & Automatic Manufacturing Technique, 2022(11): 62-65, 69.
|
|
|
| [7] |
张卉,朱永飞,刘雪飞,等.基于模糊迭代Q-学习的冶金工业机器人轨迹跟踪控制研究[J].工程设计学报,2022,29(5):564-571. doi:10.3785/j.issn.1006-754X.2022.00.073
ZHANG H, ZHU Y F, LIU X F, et al. Research on trajectory tracking control of metallurgical industrial robot based on fuzzy iterative Q-learning[J]. Chinese Journal of Engineering Design, 2022, 29(5): 564-571.
doi: 10.3785/j.issn.1006-754X.2022.00.073
|
|
|
| [8] |
CHEN J X, LI J M. Fuzzy adaptive iterative learning coordination control of second-order multi-agent systems with imprecise communication topology structure[J]. International Journal of Systems Science, 2018, 49(1/4): 546-556.
|
|
|
| [9] |
张建宇,高天宇,于潇雁,等.基于自适应时延估计的空间机械臂连续非奇异终端滑模控制[J].机械工程学报,2021,57(11):177-183. doi:10.3901/jme.2021.11.177
ZHANG J Y, GAO T Y, YU X Y, et al. Continuous non-singular terminal sliding mode control of space robot based on adaptive time delay estimation[J]. Journal of Mechanical Engineering, 2021, 57(11): 177-183.
doi: 10.3901/jme.2021.11.177
|
|
|
| [10] |
葛为民,闫珂珂,王肖锋,等.可重构机械臂的鲁棒模糊自适应补偿控制[J].系统仿真学报,2018,30(5):1950-1956.
GE W M, YAN K K, WANG X F, et al. Robust fuzzy adaptive compensation control of reconfigurable manipulator[J]. Journal of System Simulation, 2018, 30(5): 1950-1956.
|
|
|
| [11] |
VIJAY M, JENA D. Backstepping terminal sliding mode control of robot manipulator using radial basis functional neural networks[J]. Computers and Electrical Engineering, 2018, 67: 690-707.
|
|
|
| [12] |
LEE J Y, CHANG P H, JIN M L. Adaptive integral sliding mode control with time-delay estimation for robot manipulators[J]. IEEE Transactions on Industrial Electronics, 2017, 64(8): 6796-6804.
|
|
|
| [13] |
杨亮,陈勇,刘治.基于参数不确定机械臂系统的自适应轨迹跟踪控制[J].控制与决策,2019,34(11):2485-2490.
YANG L, CHEN Y, LIU Z. Adaptive trajectory tracking control for manipulator with uncertain dynamics and kinematics[J]. Control and Decision, 2019, 34(11): 2485-2490.
|
|
|
| [14] |
DUAN J J, GAN Y H, CHENG M, et al. Symmetrical adaptive variable admittance control for position/force tracking of dual-arm cooperative manipulators with unknown trajectory deviations[J]. Robotics and Computer-Integrated Manufacturing, 2019, 57(3): 357-369.
|
|
|
| [15] |
DWIVEDI A, SHIEFF D, TURNER A, et al. A shared control framework for robotic telemanipulation combining electromyography based motion estimation and compliance control[C]//2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, May 30-Jun. 5, 2021.
|
|
|
| [16] |
GILLINI G, LILLO P D, ARRICHIELLO F. An assistive shared control architecture for a robotic arm using EEG-based BCI with motor imagery[C]//2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Prague, Sep. 27-Oct. 1, 2021.
|
|
|
| [17] |
何欣荣,张刚.机械臂的固定时间非奇异滑模自适应控制[J].组合机床与自动加工技术,2022(9):84-87.
HE X R, ZHANG G. Fixed-time nonsingular sliding mode adaptive control of manipulator[J]. Modular Machine Tool & Automatic Manufacturing Technique, 2022(9): 84-87.
|
|
|
| [18] |
郭宇飞,许盛悦,李慧子,等.基于改进滑模趋近律的振动基机械臂的有限时间轨迹跟踪控制[J].振动与冲击,2022,41(20):86-92,194.
GUO Y F, XU S Y, LI H Z, et al. Finite-time trajectory tracking control of oscillatory-based manipulators based on an improved sliding mode reaching law[J]. Journal of Vibration and Shock, 2022, 41(20): 86-92, 194.
|
|
|
| [19] |
翟伟娜,葛运旺,宋书中.基于改进趋近律的机械手滑模控制[J].信息与控制,2014,43(3):300-305,313.
ZHAI W N, GE Y W, SONG S Z. Sliding mode control for robotic manipulators based on the improved reaching law[J]. Information and Control, 2014, 43(3): 300-305, 313.
|
|
|
| [20] |
孟思华,王尧尧,陈柏,等.基于时延估计的绳驱动飞行机械臂模糊非奇异终端滑模飞行控制[J].中南大学学报(自然科学版),2021,52(10):3465-3474. doi:10.11817/j.issn.1672-7207.2021.10.010
MENG S H, WANG Y Y, CHEN B, et al. Fuzzy nonsingular terminal sliding mode flying control of cabledriven flying manipulators based on time-delay estimation[J]. Journal of Central South University (Science and Technology), 2021, 52(10): 3465-3474.
doi: 10.11817/j.issn.1672-7207.2021.10.010
|
|
|
| [21] |
李正楠,张锦,殷玉枫,等.多关节机械臂的分数阶滑模变结构神经网络自适应控制[J].机械科学与技术,2021,40(2):270-275.
LI Z N, ZHANG J, YIN Y F, et al. Fractional sliding mode variable structure neural network adaptive control of multi-joint manipulator[J]. Mechanical Science and Technology for Aerospace Engineering, 2021, 40(2): 270-275.
|
|
|
| [22] |
JIA Q X, YUAN B N, CHEN G, et al. Adaptive fuzzy terminal sliding mode control for the free-floating space manipulator with free-swinging joint failure[J]. Chinese Journal of Aeronautics, 2021, 34(9): 178-198.
|
|
|
| [23] |
刘杰,历飞雨.基于弹性关节的二自由度机械臂建模与控制研究[J].机电工程,2022,39(6):846-853. doi:10.3969/j.issn.1001-4551.2022.06.019
LIU J, LI F Y. Modeling and control of 2-DOF robot arm based on elastic joint[J]. Journal of Mechanical & Electrical Engineering, 2022, 39(6): 846-853.
doi: 10.3969/j.issn.1001-4551.2022.06.019
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|