| Machinery System Dynamics |
|


|
|
|
| Structure and dynamics analysis of special manipulator frame for replacing wire rope of electric shovel |
Hongyue CHEN( ),Minghang CAI(),Xinwei YANG,Zhonghuan DAI ),Minghang CAI(),Xinwei YANG,Zhonghuan DAI |
| School of Mechanical Engineering, Liaoning Technical University, Fuxin 123000, China |
|
|
|
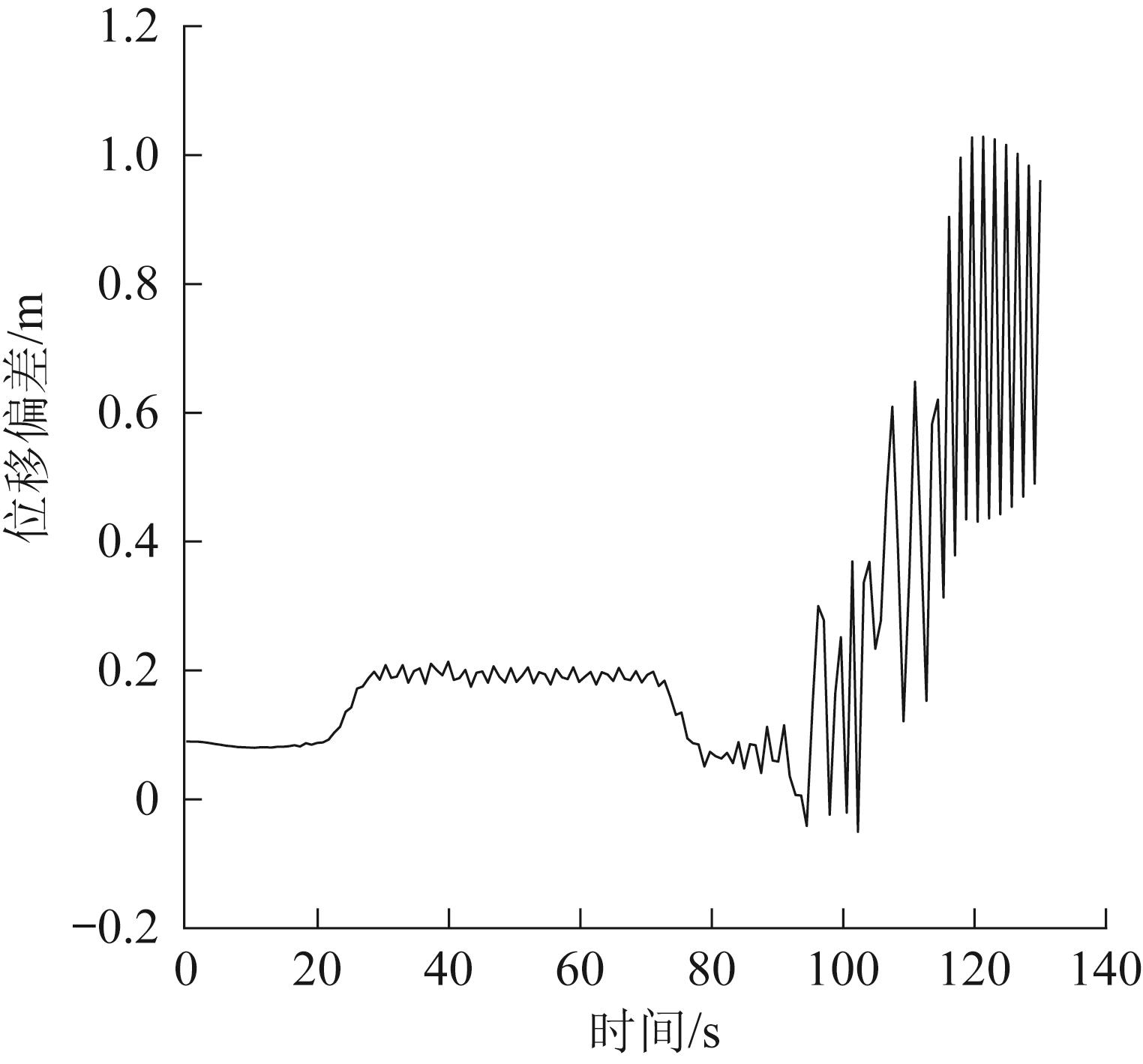
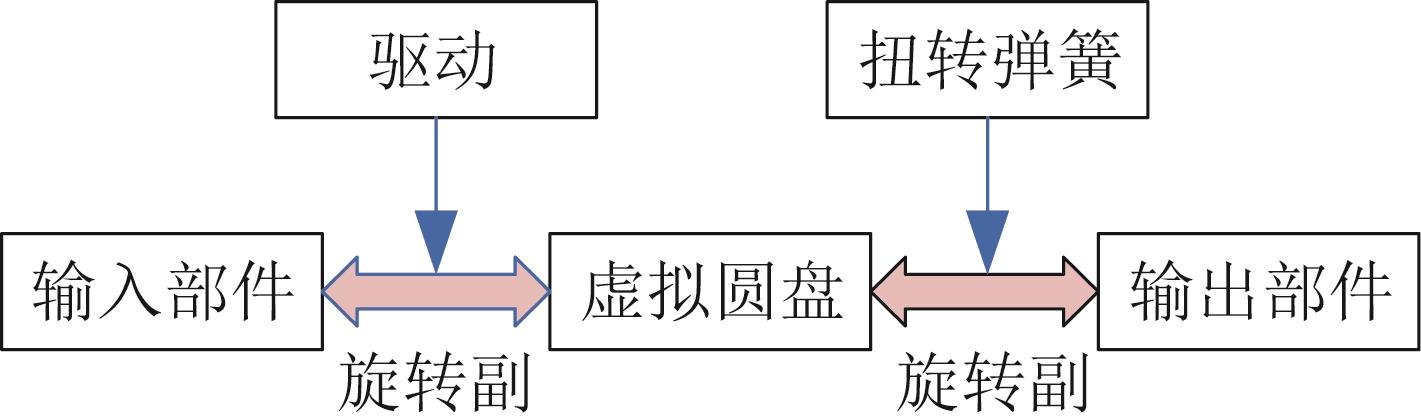
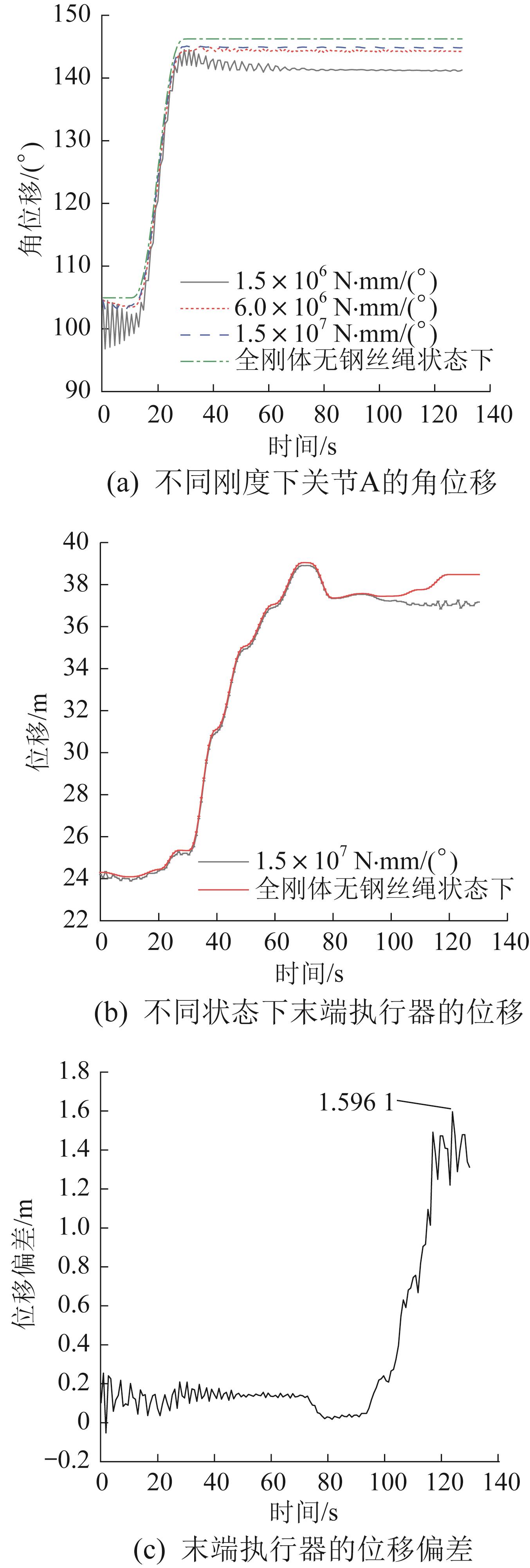
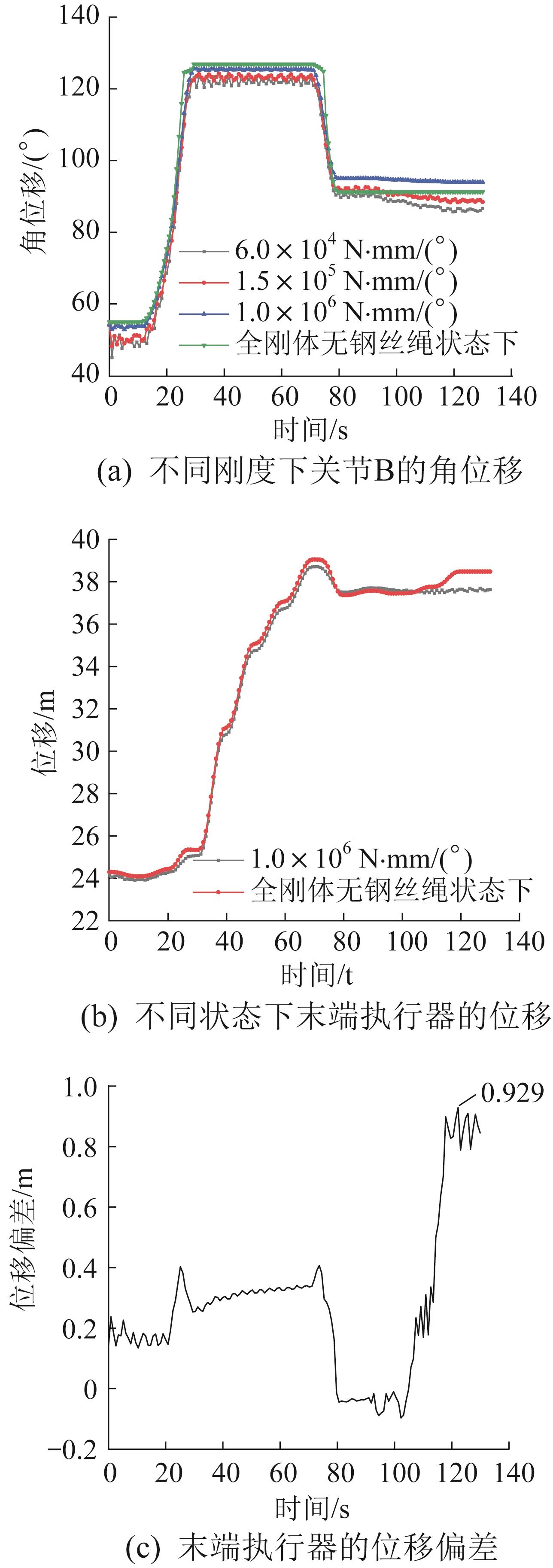
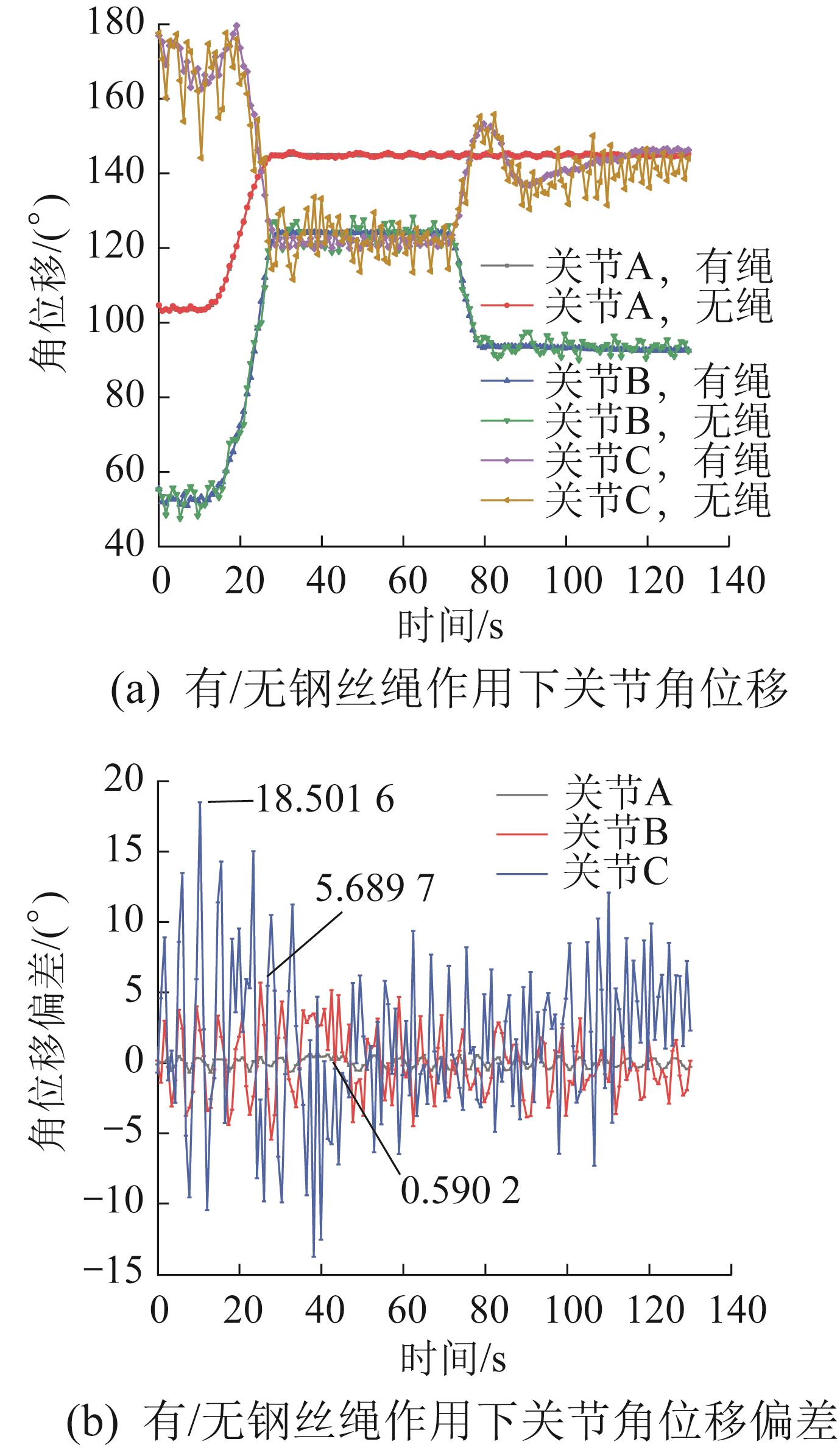
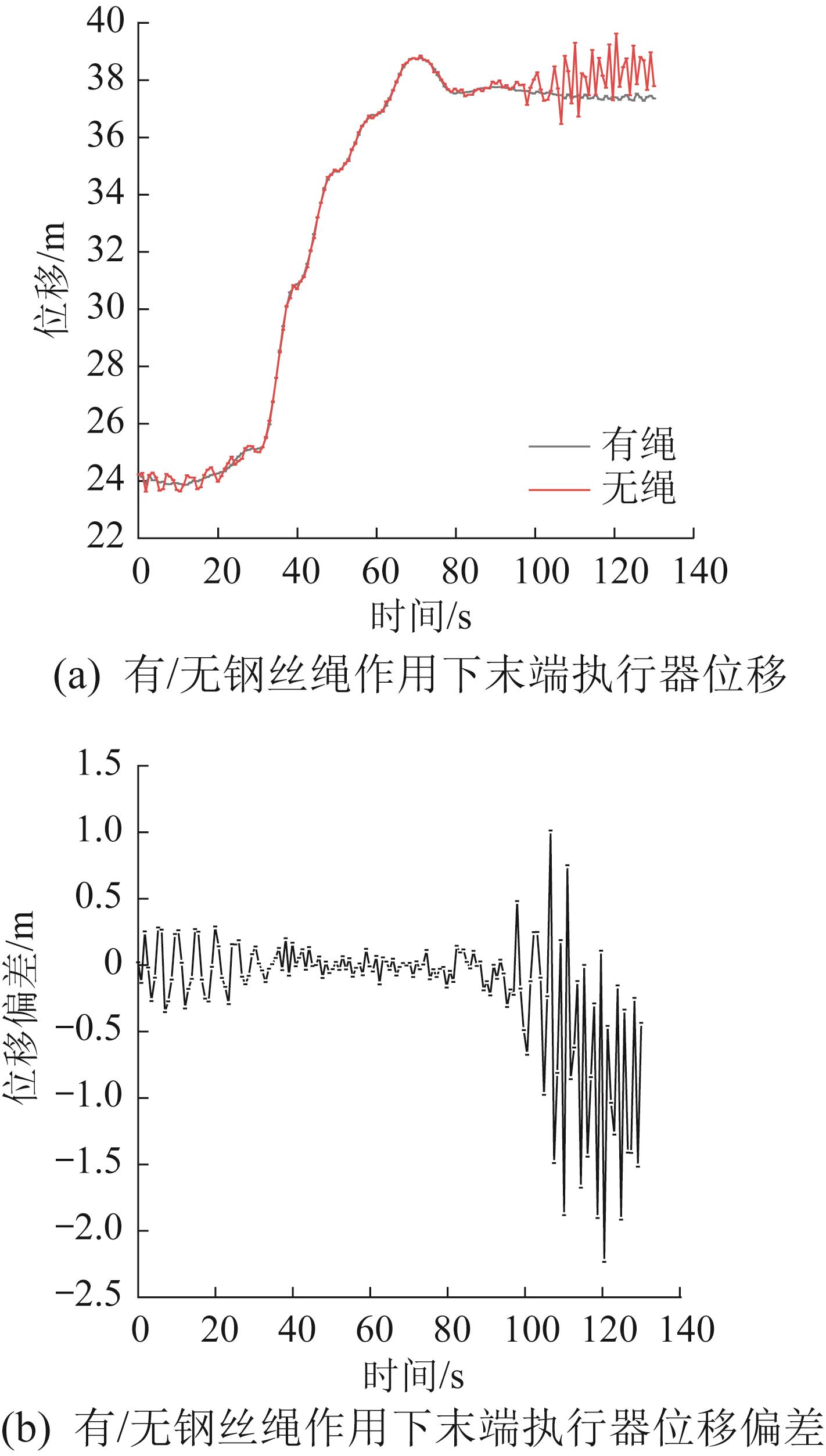
Abstract In response to the problem of low efficiency in replacing the wire rope of electric shovel, a manipulator frame used to replace wire rope was designed. The dynamic model of the manipulator frame was established taking the gravity of the wire rope extracted by the end effector of the manipulator frame as the main acting load. Using finite element analysis method, multi-body dynamic analysis method and the "spring-rotor" model, the rigid flexible coupling dynamic analysis was conducted on the arm and main hinge joints. The influence of different joint stiffness on the dynamic characteristics of the end effector was studied, and the optimal stiffness of each joint was selected based on the simulation results to further analyze the influence on joint angular displacement and end effector displacement with/without wire rope action. The results showed that as the stiffness coefficient of the joint increased, the deviation between the joint angular displacement and that in the state of full rigid body without wire rope action gradually decreased, and the end effector displacement gradually approached that in the state of full rigid body without wire rope action; the stiffness of the hinge joint between the telescopic forearm and the curved arm had the greatest influence on the end effector displacement; after selecting the optimal stiffness coefficient for each joint, the angular displacement deviation of the hinge joint between the telescopic mechanism and the turntable was the smallest with wire rope action. The vibration amplitude of the manipulator frame without wire rope action was higher than that with wire rope action. The research results provide a reference for the study of the stability and motion accuracy control of the manipulator frame.
|
|
Received: 14 March 2023
Published: 03 November 2023
|
|
|
|
Corresponding Authors:
Minghang CAI
E-mail: chyxiaobao@126.com;2875349857@qq.com
|
更换电铲钢丝绳专用机械臂架的结构及动力学分析
针对电铲钢丝绳更换效率低下的问题,设计了一种用来更换电铲钢丝绳的机械臂架。以机械臂架末端执行器提取的钢丝绳重力为主要作用载荷,建立了机械臂架动力学模型。利用有限元分析方法、多体动力学分析方法及“弹簧-转子”模型,对臂杆及主要铰接关节进行刚柔耦合动力学分析,研究不同关节刚度对末端执行器动态特性的影响,并根据仿真结果选取各关节较优的刚度,来进一步分析有/无钢丝绳作用对关节角位移和末端执行器位移的影响。结果表明:随着关节刚度系数的增大,关节角位移与全刚体无钢丝绳状态下的偏差逐渐减小,末端执行器的位移逐渐趋近于全刚体无钢丝绳状态;伸缩小臂与弧形臂铰接关节的刚度对末端执行器位移的影响最大;在选取各关节较优的刚度系数后,在钢丝绳作用下伸缩机构与转台铰接关节产生的角位移偏差最小,在无钢丝绳作用下机械臂架的振动幅度大于有钢丝绳作用时。研究结果为机械臂架工作稳定性及运动精度控制研究提供了参考。
关键词:
机械臂架,
钢丝绳,
动力学,
位移偏差
|
|
| [1] |
张建国.对电铲钢丝绳寿命计算及影响因素的探讨[J].中国战略新兴产业, 2018(24):196.
ZHANG J G. Discussion on life calculation and influencing factors of electric shovel wire rope[J]. China Strategic Emerging Industry, 2018(24): 196.
|
|
|
| [2] |
聂忠叶.对电铲钢丝绳寿命计算及影响因素的探讨[J].内蒙古煤炭经济, 2019(15):83-85. doi:10.3969/j.issn.1008-0155.2019.15.062
NIE Z Y. Discussion on life calculation and influencing factors of wire rope for electric shovel[J]. Inner Mongolia Coal Economy, 2019(15): 83-85.
doi: 10.3969/j.issn.1008-0155.2019.15.062
|
|
|
| [3] |
周雪健.矿用WK-10B型电铲装矿作业实时称重系统开发研究[D].包头:内蒙古科技大学, 2022:29-36.
ZHOU X J. Development and research of real-time weighing system for mine WK-10B electric shovel loading operation[D]. Baotou: Inner Mongolia University of Science and Technology, 2022: 29-36.
|
|
|
| [4] |
赵斌.基于三自由度挖掘机机械臂系统的刚柔耦合动力学分析[D].兰州:兰州理工大学,2016:31-44.
ZHAO B. Dynamic analysis of rigid-flexible coup-ling based on three-degree-of-freedom excavator manipulator system[D]. Lanzhou: Lanzhou University of Technology, 2016: 31-44.
|
|
|
| [5] |
王相兵,童水光.基于刚柔耦合的液压挖掘机机械臂非线性动力学研究[J].振动与冲击,2014,33(1):63-70. doi:10.3969/j.issn.1000-3835.2014.01.011
WANG X B, TONG S G. Nonlinear dynamical behavior analysis on rigid-flexible coupling mechanical arm of hydraulic excavator[J]. Journal of Vibration and Shock, 2014, 33(1): 63-70.
doi: 10.3969/j.issn.1000-3835.2014.01.011
|
|
|
| [6] |
殷玉枫,武奎扬,张锦.柔性臂动力学建模与规划角加速度抑振研究[J].机械设计与制造,2022(6):249-253. doi:10.3969/j.issn.1001-3997.2022.06.054
YIN Y F, WU K Y, ZHANG J. Flexible arm dynamics modeling and research on angular acceleration vibration suppression[J]. Machinery Design & Manufacture, 2022(6): 249-253.
doi: 10.3969/j.issn.1001-3997.2022.06.054
|
|
|
| [7] |
颜世军,彭剑,刘泽,等.大型柔性起重臂系统回转吊装刚柔耦合动力学模型[J].振动与冲击,2018,37(5):175-179,201.
YAN S J, PENG J, LIU Z, et al. Rigid-flexible coupled dynamic model of a huge-type truckcrane's boom system during its slewing hoisting[J]. Journal of Vibration and Shock, 2018, 37(5): 175-179, 201.
|
|
|
| [8] |
张玉玲,谷勇霞,赵杰亮,等.机械臂臂杆刚度主动控制下的末端振动特性研究[J].力学学报,2020,52(4): 985-995.
ZHANG Y L, GU Y X, ZHAO J L, et al. Research on end vibration characteristics of the manipulator end under active control of arm stiffness[J]. Chinese Journal of Theoretical and Applied Mechanics, 2020, 52(4): 985-995.
|
|
|
| [9] |
王海,付邦晨,薛彬,等.六自由度柔性关节机械臂的动力学分析[J].中国机械工程, 2016, 27(8):1096-1101. doi:10.3969/j.issn.1004-132X.2016.08.018
WANG H, FU B C, XUE B, et al. Dynamic analysis of a 6-DOF manipulators with flexible joints[J]. China Mechanical Engineering, 2016, 27(8): 1096-1101.
doi: 10.3969/j.issn.1004-132X.2016.08.018
|
|
|
| [10] |
沈国栋.考虑关节柔性的六自由度串联工业机器人动力学建模与末端抖动抑制[D].济南:山东大学,2020: 15-22. doi:10.1109/rcar52367.2021.9517338
SHEN G D. Dynamic modeling and terminal jitter suppression of a 6-DOFseries industrial robot considering joint flexibility[D]. Jinan: Shandong University, 2020:15-22.
doi: 10.1109/rcar52367.2021.9517338
|
|
|
| [11] |
祝寒友,吴松,陈必发,等.柔性机械臂关节作动的振动抑制方法和原理性验证[J].上海航天,2022,39(6):37-42,74.
ZHU H Y, WU S, CHEN B F, et al. Principle verification and joint-actuator method for vibration suppression of flexible manipulator[J]. Aerospace Shanghai, 2022, 33(6): 37-42, 74.
|
|
|
| [12] |
梁明轩,李正刚,唐任仲,等.基于柔性多体动力学的机械臂结构优化设计[J].中国机械工程,2017,28(21): 2562-2566. doi:10.3969/j.issn.1004-132X.2017.21.008
LIANG M X, LI Z G, TANG R Z, et al. Structure optimization design of robot arm based on flexible multi-body dynamics[J]. China Mechanical Engineering, 2017, 28(21): 2562-2566.
doi: 10.3969/j.issn.1004-132X.2017.21.008
|
|
|
| [13] |
BILAL H, YIN B Q, KUMAR A, et al. A jerk-bounded trajectory planning for rotary flexible joint manipulator: An experimental approach[J]. Soft Computing, 2023, 27(7): 4029-4039.
|
|
|
| [14] |
KUMAR P, PRATIHER B. Nonlinear dynamic analysis of a multi-link manipulator with flexible links-joints mounted on a mobile platform[J]. Advances in Space Research, 2023, 71(5): 2095-2127.
|
|
|
| [15] |
李瑞强,王欣,高顺德.基于ADAMS-Cable的多机吊装刚柔耦合动力学分析[J].港口装卸,2016(3):4-8. doi:10.3963/j.issn.1000-8969.2016.03.002
LI R Q, WANG X, GAO S D. Rigid-flexible coupling dynamic analysis for multi-crane lifting based on ADAMS-Cable[J]. Port Operation, 2016(3): 4-8.
doi: 10.3963/j.issn.1000-8969.2016.03.002
|
|
|
| [16] |
韩莉莉,许军辉,宁祎,等.基于ADAMS/Cable模块的柔索驱动仿真研究[J].中原工学院学报,2014,25(6):1-5. doi:10.3969/j.issn.1671-6906.2014.06.001
HAN L L, XU J H, NING Y, et al. Research on simulation of cable drive based on ADAMS/Cable[J]. Journal of Zhongyuan University of Technology, 2014, 25(6): 1-5.
doi: 10.3969/j.issn.1671-6906.2014.06.001
|
|
|
| [17] |
张营章,张顺心,崔少杰,等.基于ADAMS/Cable的起重机钢丝绳的仿真分析[J].制造业自动化,2013,35(13):10-12. doi:10.3969/j.issn.1009-0134.2013.13.004
ZHANG Y Z, ZHANG S X, CUI S J, et al. Simulation analysis for the wire rope of the crane based on ADAMS/Cable[J]. Manufacturing Automation, 2013, 35(13): 10-12.
doi: 10.3969/j.issn.1009-0134.2013.13.004
|
|
|
| [18] |
韩崇瑞.基于刚柔耦合动力学仿真的塔式起重机疲劳寿命分析[D].北京:北京建筑大学,2021:40-44.
HAN C R. Fatigue life analysis of tower crane based on rigid-flexible coupling dynamics simulation[D]. Beijing: Beijing University of Civil Engineering and Architecture, 2021: 40-44.
|
|
|
| [19] |
颜世军,刘运思,彭剑.超长柔吊装臂架回转作业刚柔耦合动力学模型与分析[J].应用力学学报,2018, 35(6): 1288-1294,1421. doi:10.11776/cjam.35.06.C043
YAN S J, LIU Y S, PENG J. Rigid-flexible coupling dynamics model and analysis of ultra flexible hoisting boom in rotating operation[J]. Chinese Journal of Applied Mechanics, 2018, 35(6): 1288-1294, 1421.
doi: 10.11776/cjam.35.06.C043
|
|
|
| [20] |
郑宇锋,王殿龙.考虑吊钩组升降的伸缩臂起重机动力学模型研究[J].大连理工大学学报,2017, 57(3):259-265.
ZHENG Y F, WANG D L. Study of dynamic model of telescopic crane with a lifting and pulling load movement[J]. Journal of Dalian University of Technology, 2017, 57(3): 259-265.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|