| Basic Parts Design |
|

|
|
|
| Design and performance analysis of reconfigurable variable stiffness compliant actuator |
Weijie DUAN1( ),Huibin QIN1(),Rong LIU1,Zhongyi LI2,Shaoping BAI3 ),Huibin QIN1(),Rong LIU1,Zhongyi LI2,Shaoping BAI3 |
1.School of Mechanical Engineering, North University of China, Taiyuan 030051, China
2.Hangzhou Innovation Institute, Beihang University, Hangzhou 310051, China
3.Department of Materials and Production, Aalborg University, Aalborg 9220, Denmark |
|
|
|
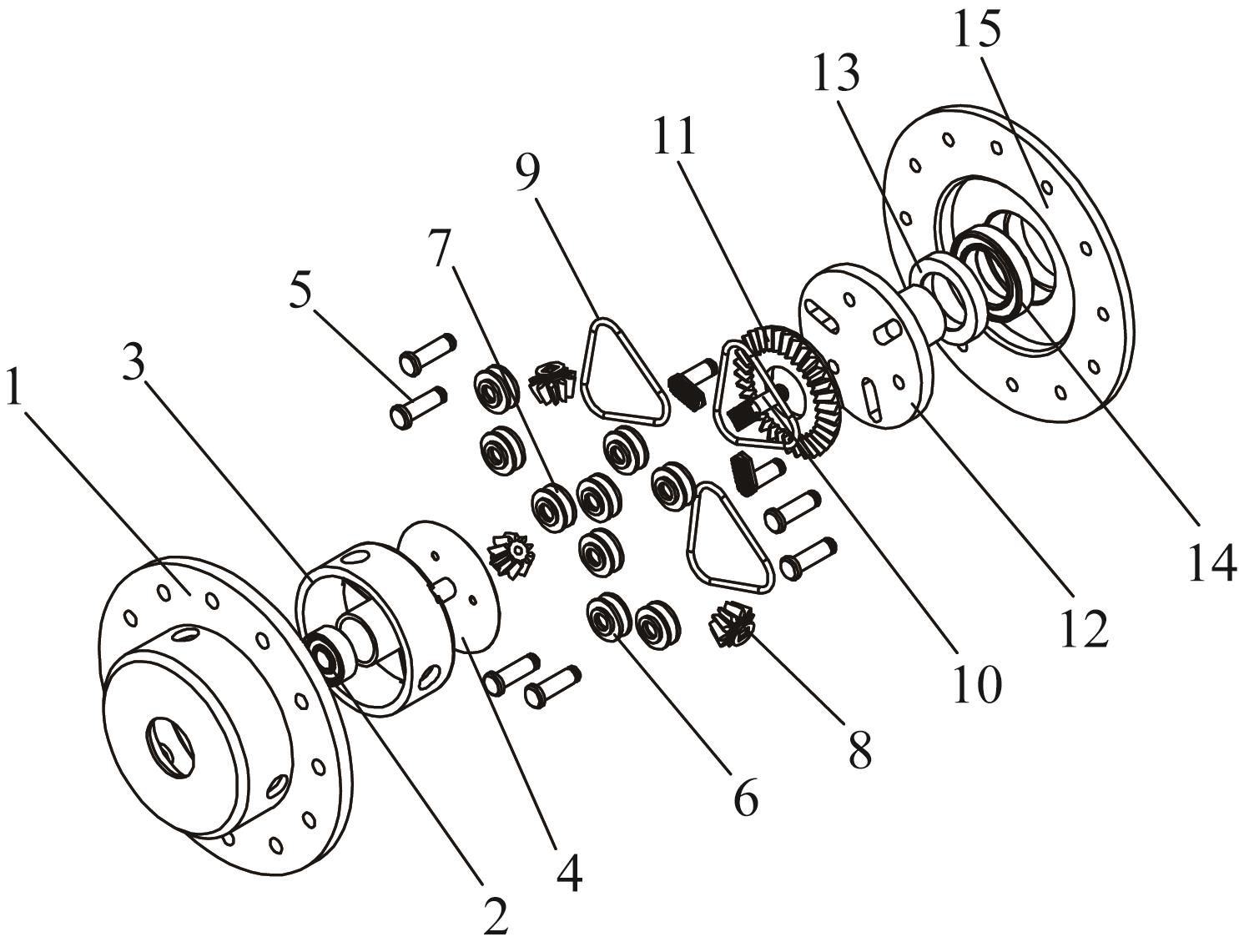
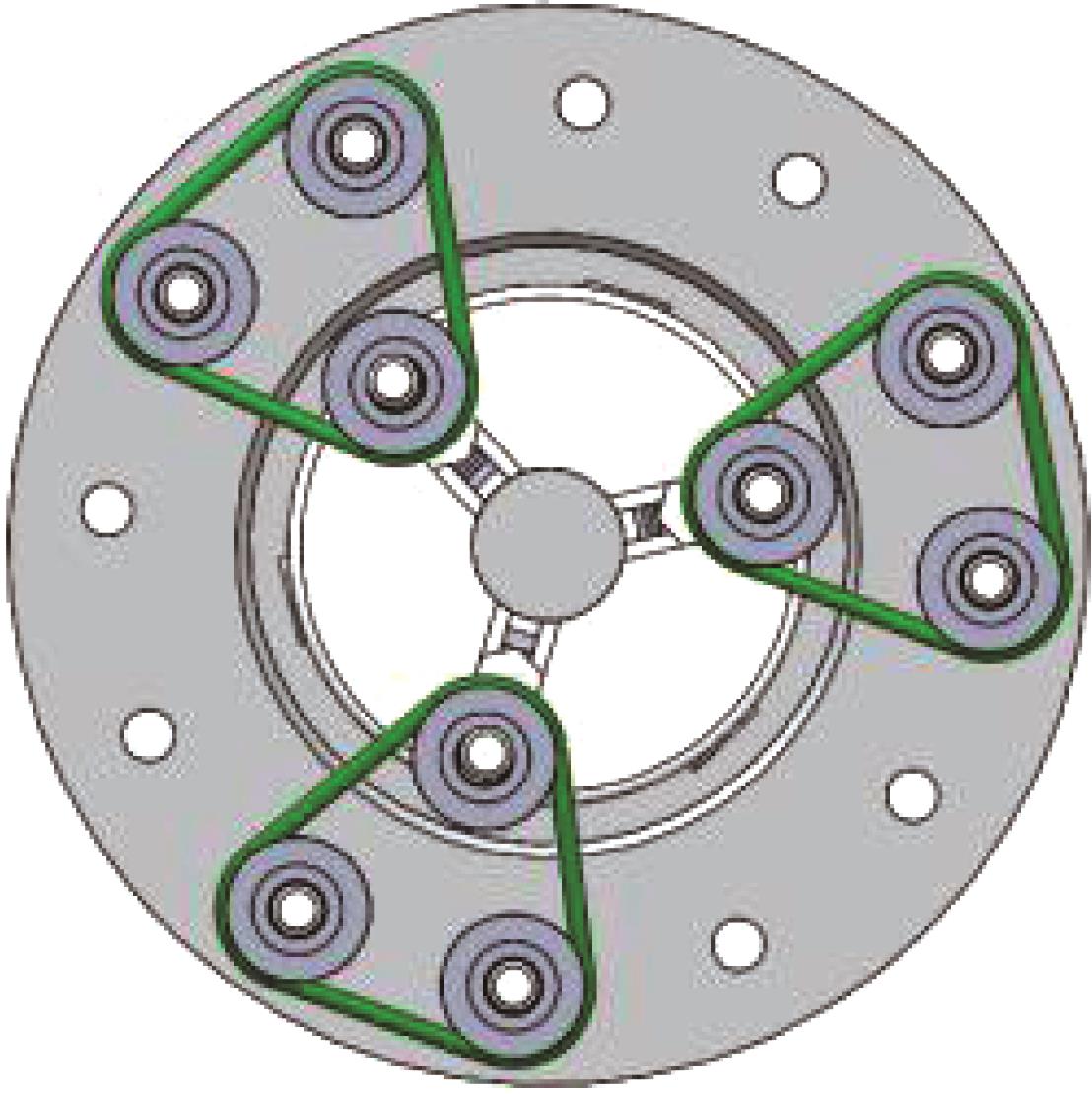
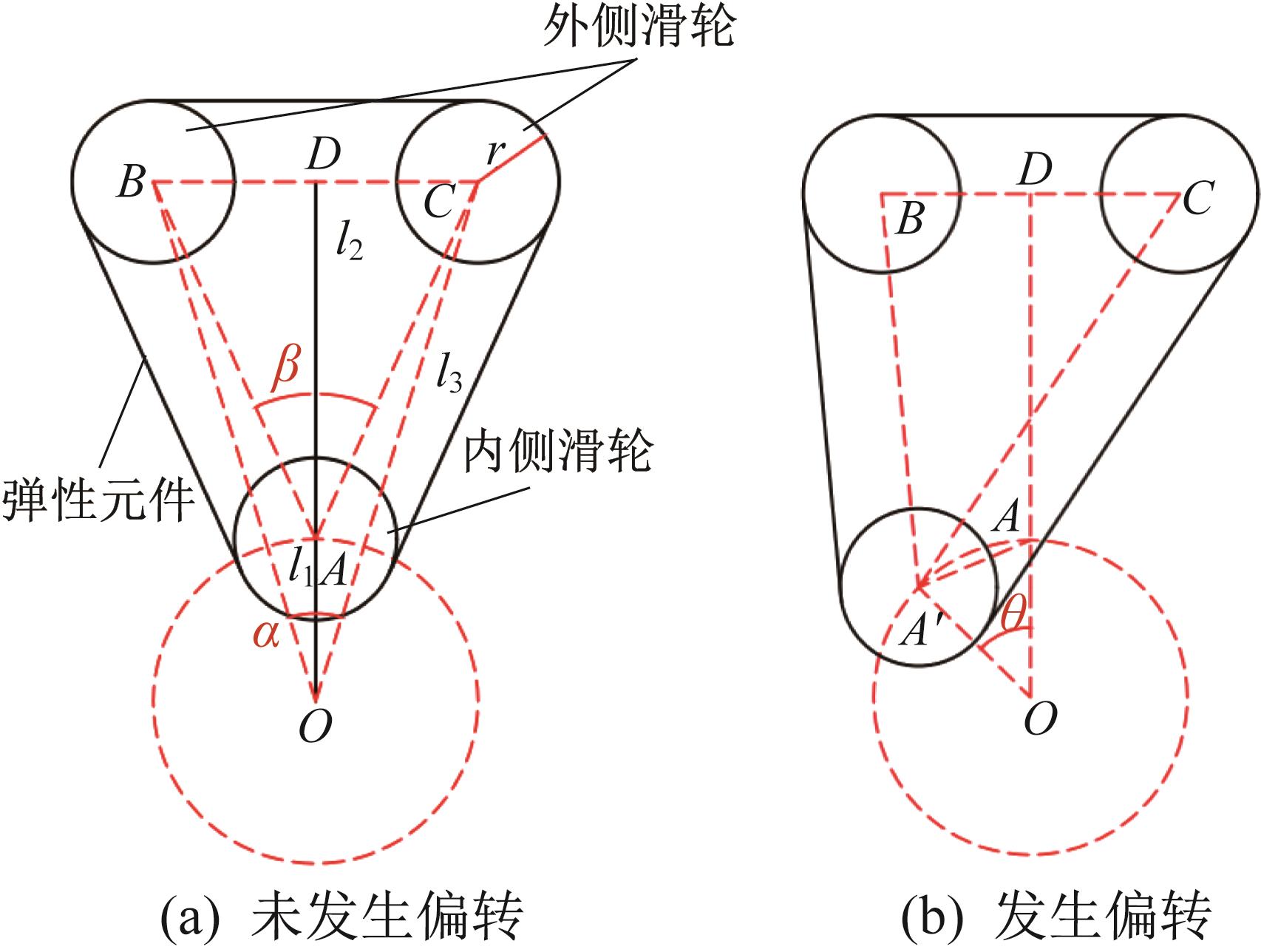
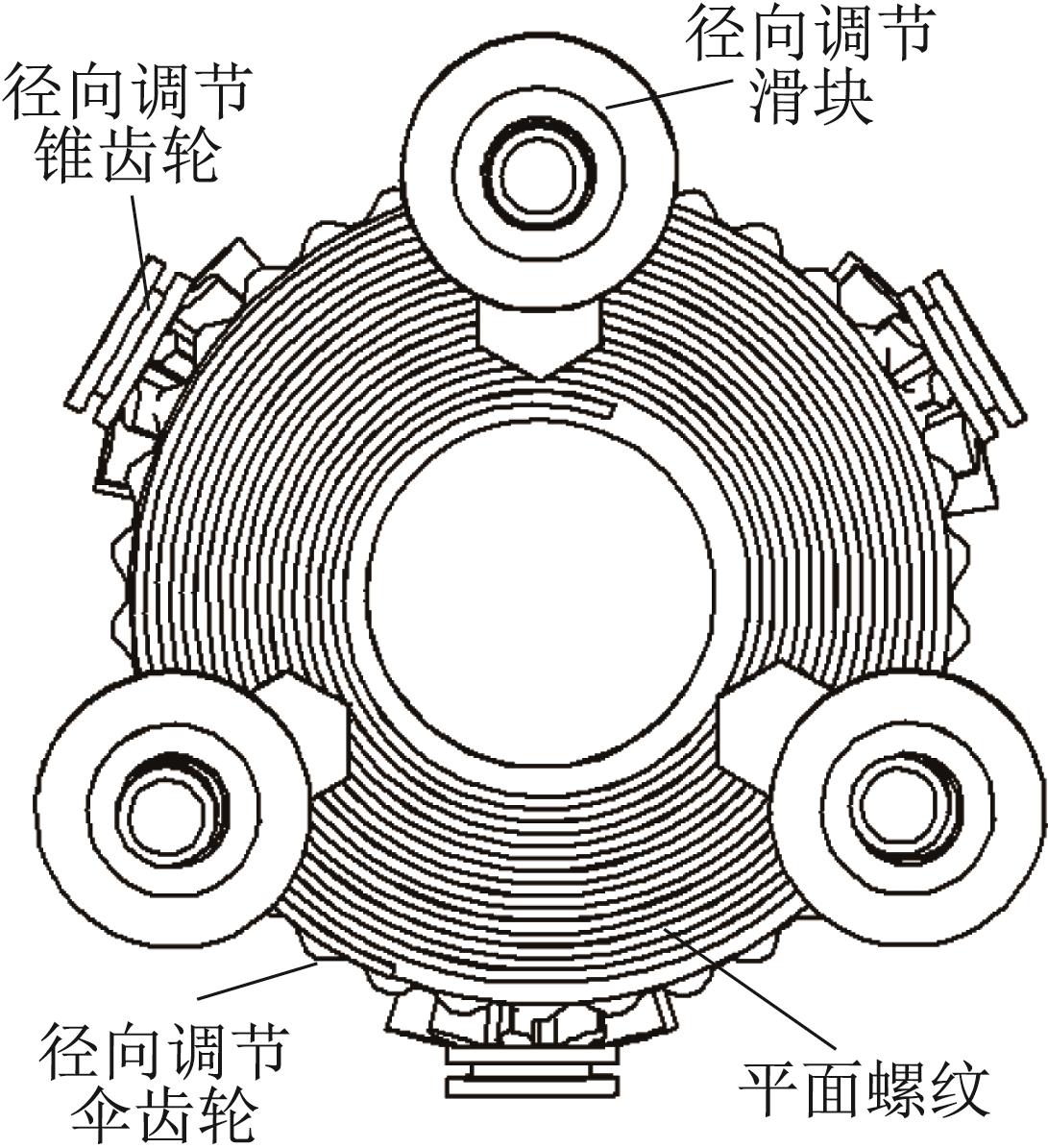
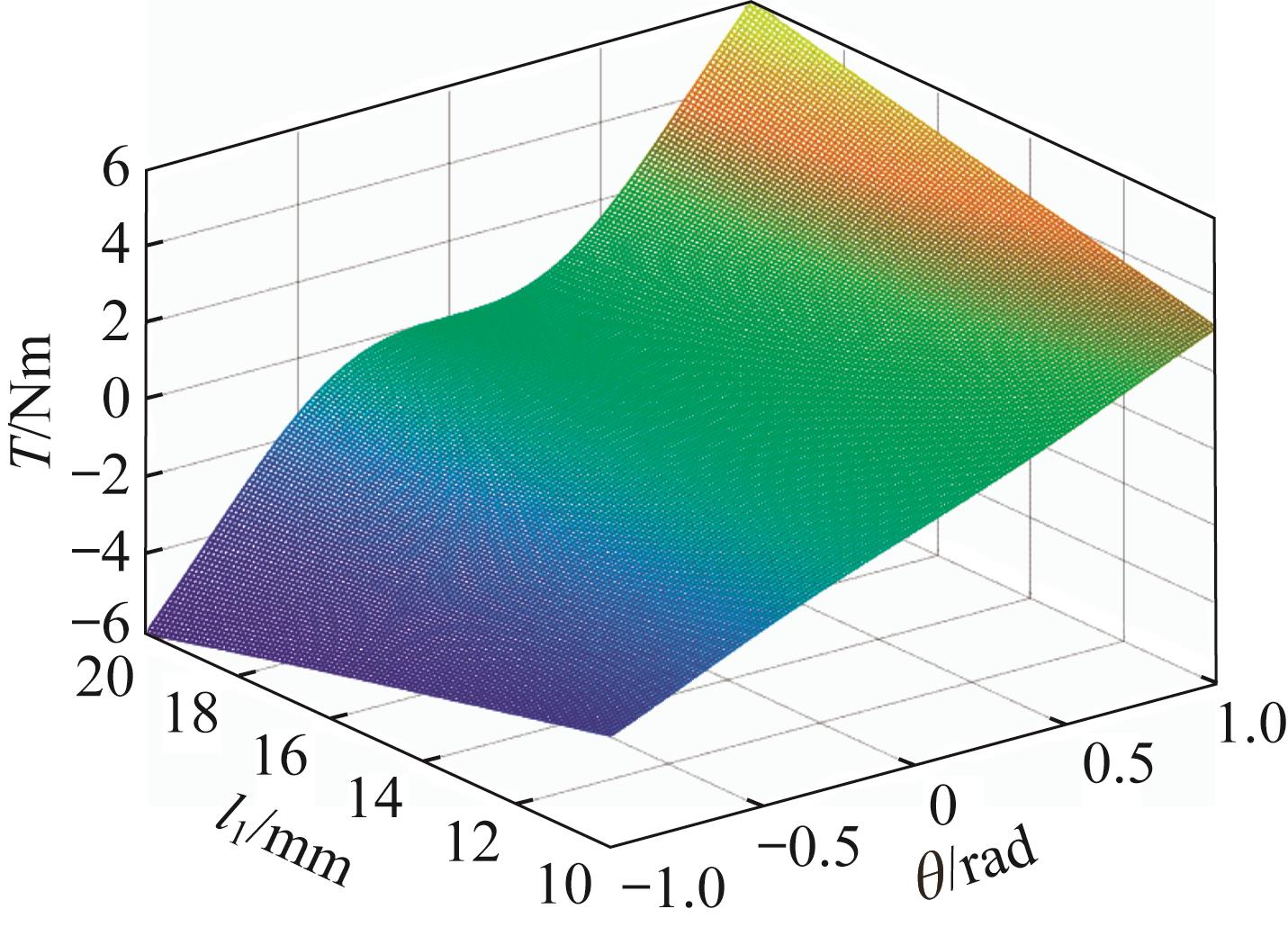
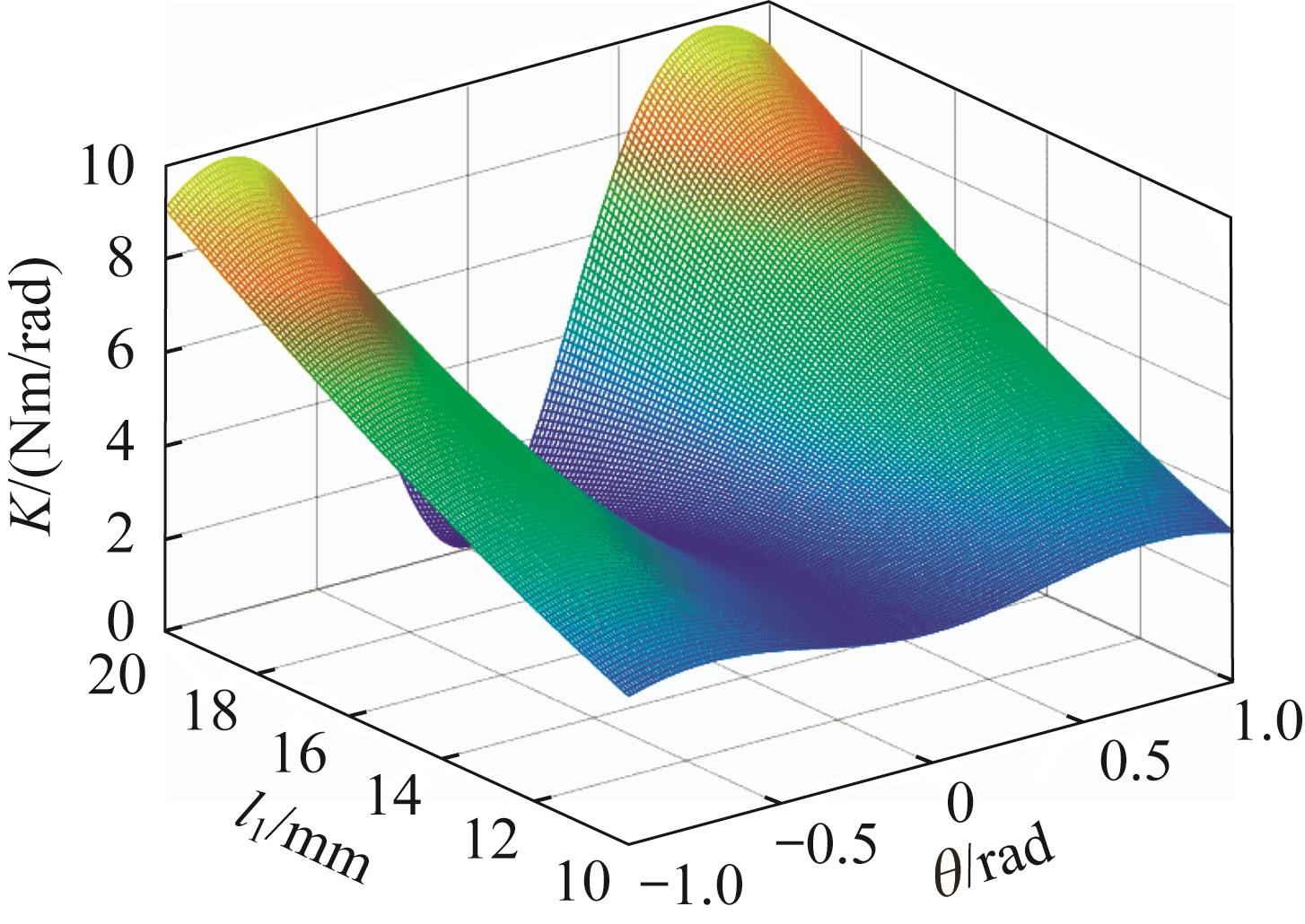
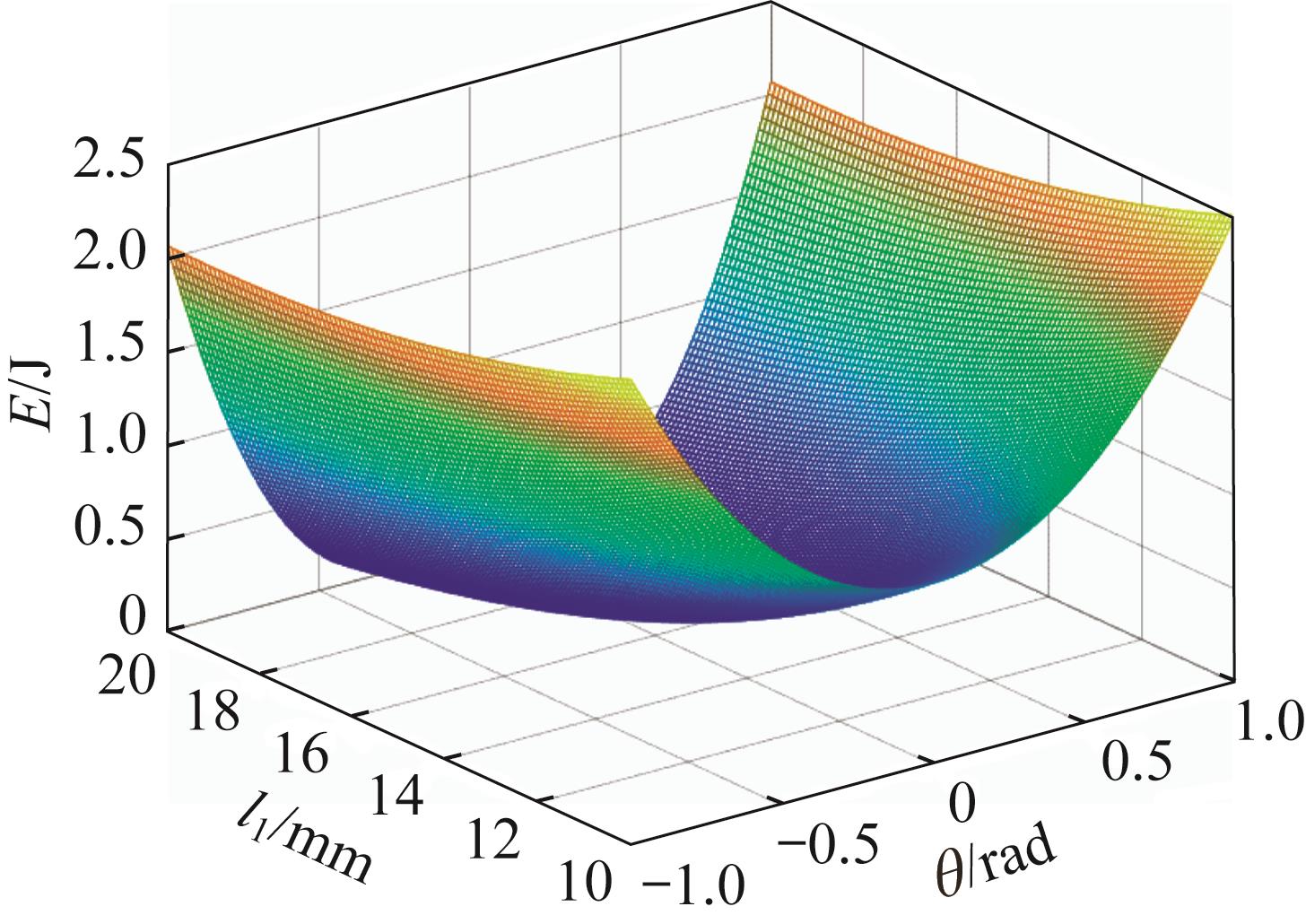
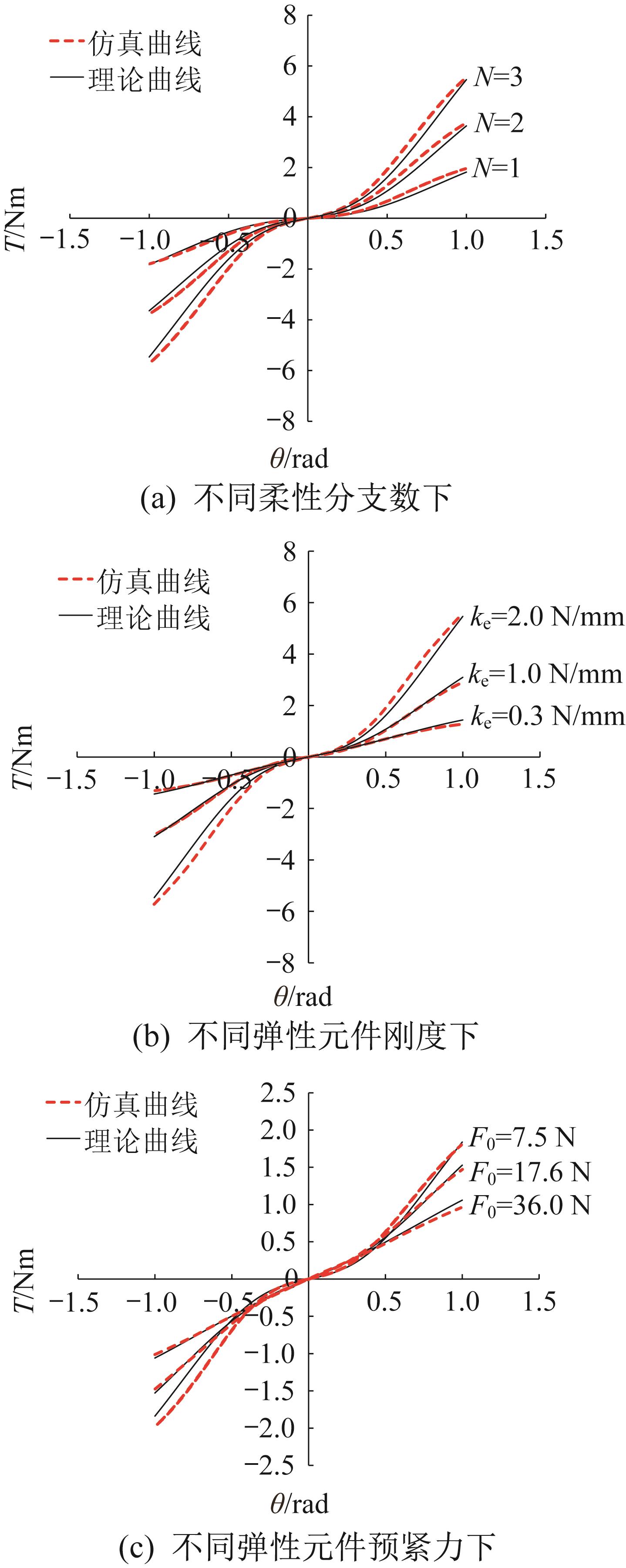
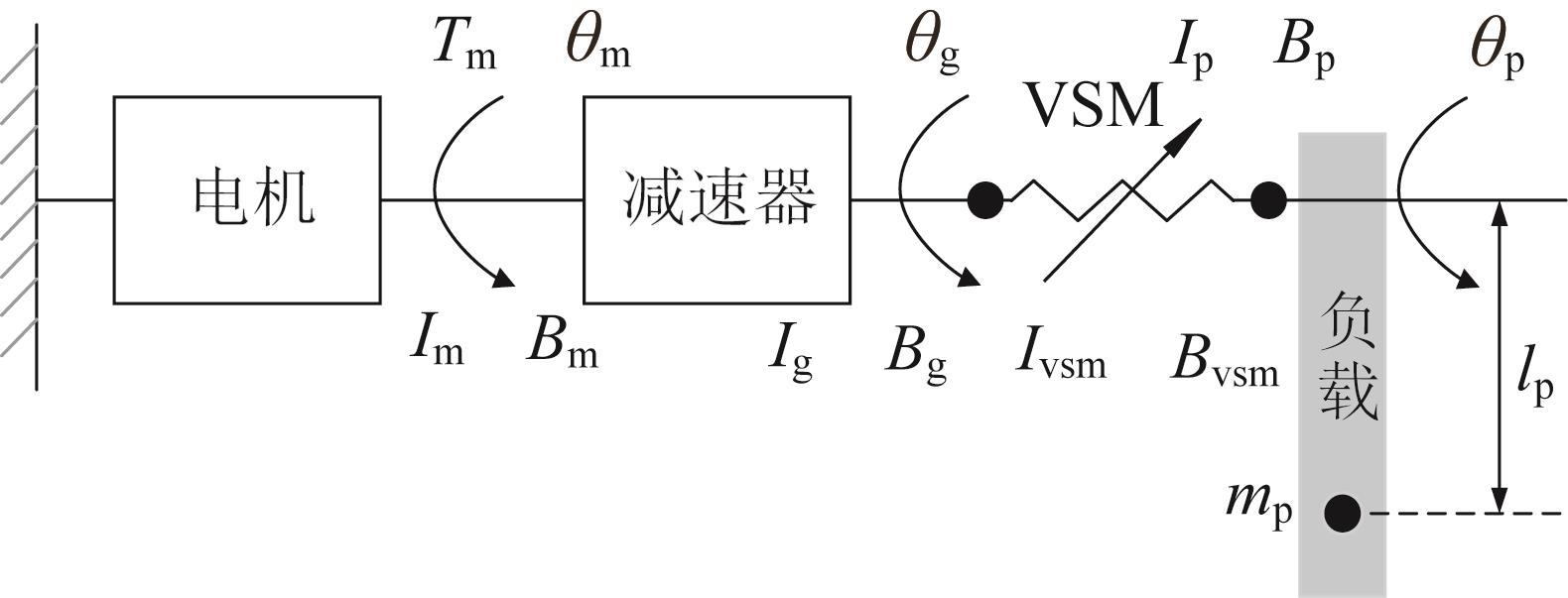
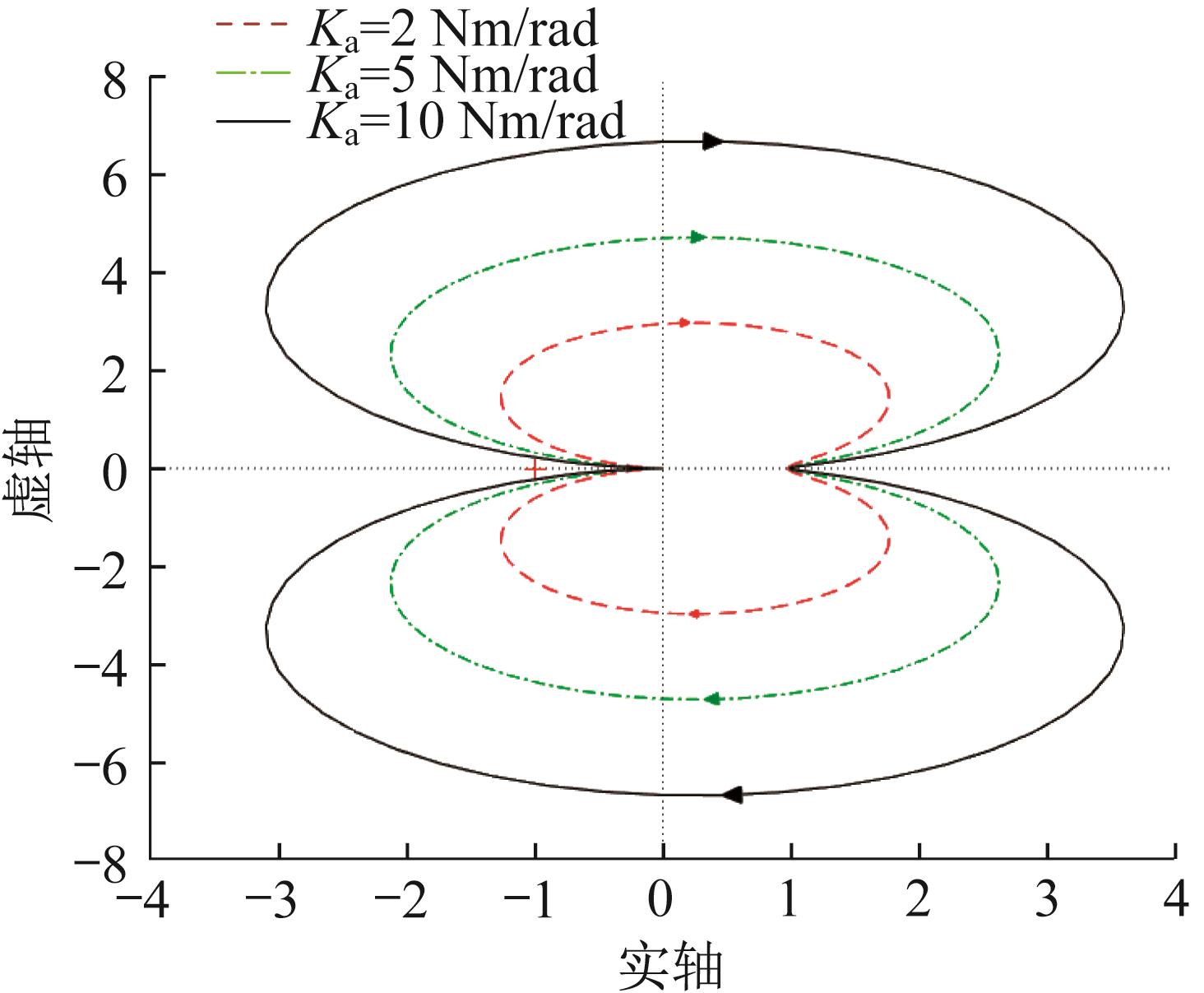
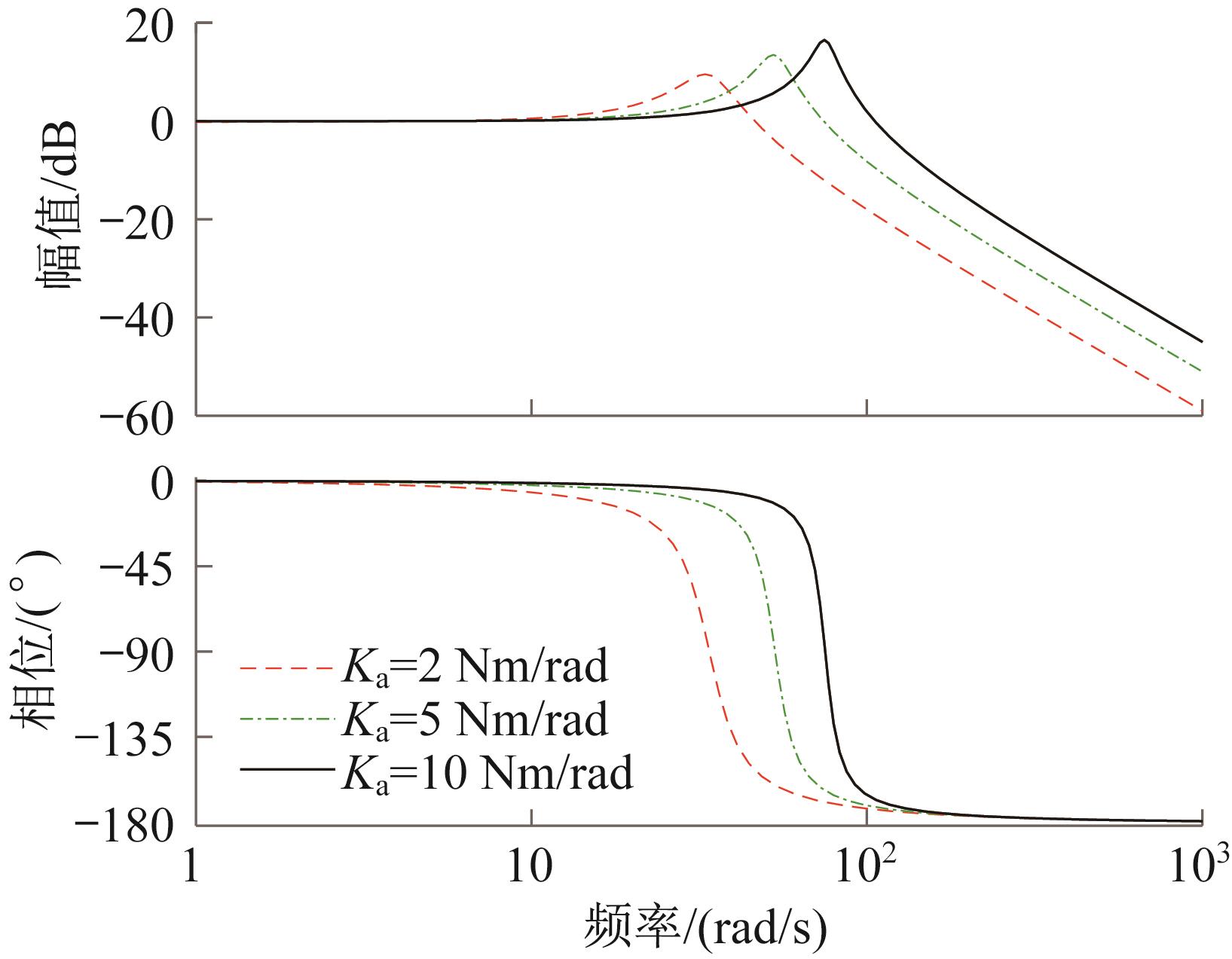
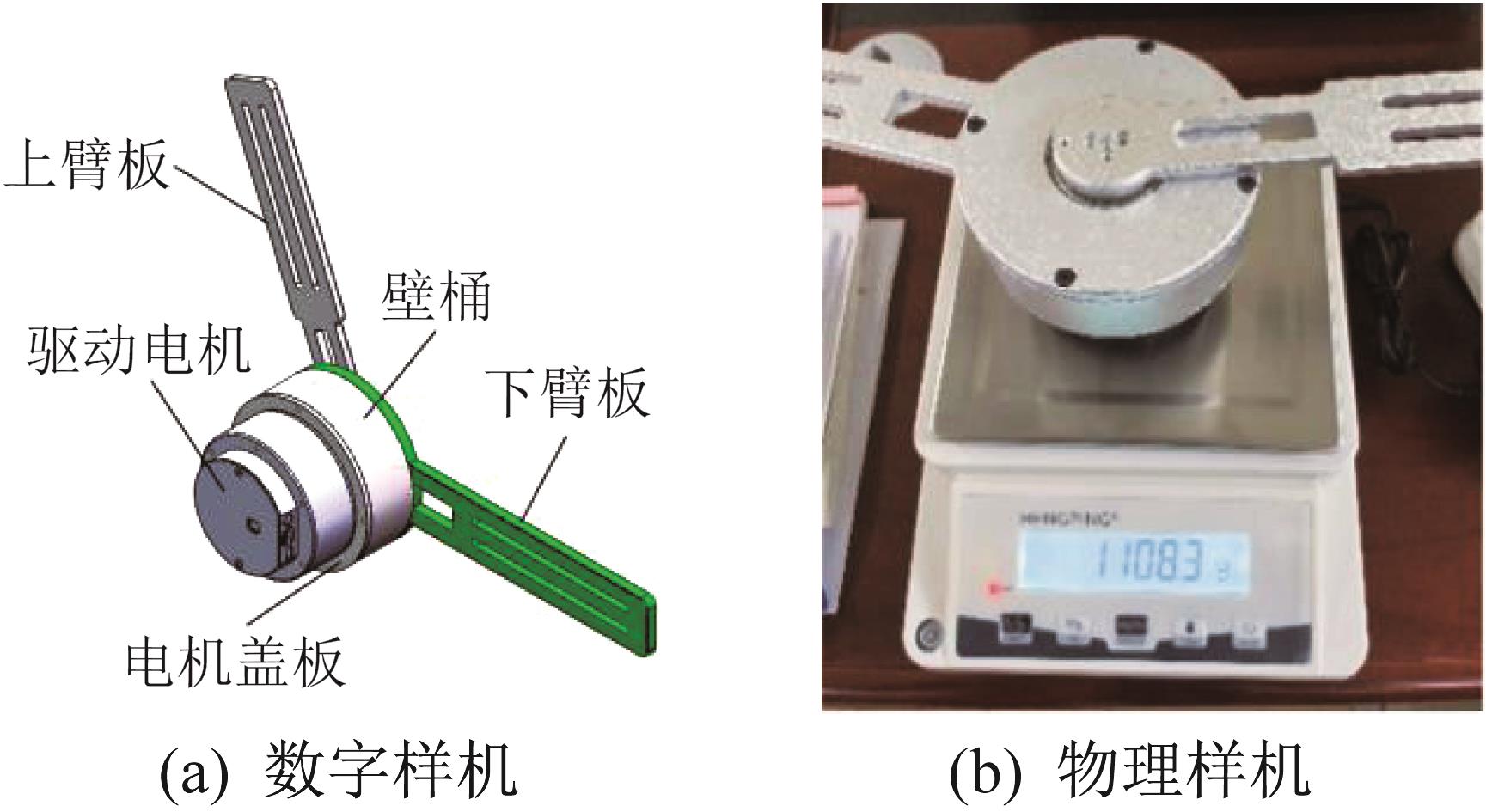
Abstract Compliant actuators can achieve safe interaction between robots and humans due to their inherent flexibility, and have strong environmental adaptability. To meet the requirements of exoskeleton robots for joint flexibility and variable stiffness characteristics, a reconfigurable variable stiffness compliant actuator was designed, which could achieve reconstruction by changing the geometric parameters, materials and quantity of elastic components, and achieve variable stiffness within an adjustable range by adjusting the radial preload. Firstly, based on the transmission principle of a zero-length frame four-bar mechanism, a stiffness mathematical model of the variable stiffness compliant actuator was established, and the influence of the number of flexible branches and the stiffness and preload of elastic components on the output torque and stiffness of the actuator was analyzed. Then, an ADAMS virtual prototype model of the actuator was established, and the statics performance simulation analysis was carried out to verify the correctness of the stiffness mathematical model. Finally, the dynamics model of the actuator was established and the transfer function of the dynamics system was obtained through Laplace transform. The frequency characteristics analysis results indicated that the stability of the compliant actuator was good. The designed compliant actuator had a small volume and small mass, which could be applied in the driving mechanism of wearable exoskeleton robots. The research results provide theoretical and technical references for the design of compliant driving joints in robots.
|
|
Received: 23 September 2022
Published: 06 May 2023
|
|
|
|
Corresponding Authors:
Huibin QIN
E-mail: dwjttt@163.com;qhbsss@163.com
|
可重构变刚度柔性驱动器的设计与性能分析
柔性驱动器因其固有的柔顺特性,能够实现机器人与人之间的安全交互,且具有较强的环境适应能力。为满足外骨骼机器人对关节柔性及变刚度特性的要求,设计了一种具有可重构性的变刚度柔性驱动器,可通过改变弹性元件的几何参数、材料和数量来实现重构,通过径向调节预紧力来实现可调范围内的变刚度。首先,运用零长度机架四杆机构的传动原理,建立了变刚度柔性驱动器的刚度数学模型,分析了柔性分支数和弹性元件刚度、预紧力对驱动器输出扭矩和刚度的影响规律。然后,建立了驱动器的ADAMS虚拟样机模型,并开展静力学性能仿真分析,验证了刚度数学模型的正确性。最后,建立了驱动器的动力学模型,通过Laplace变换得到了动力学系统的传递函数。频率特性分析结果表明,该柔性驱动器的稳定性良好。所设计的柔性驱动器体积小且质量小,能够在可穿戴外骨骼机器人驱动机构中应用。研究结果为机器人柔性驱动关节的设计提供了理论和技术参考。
关键词:
柔性驱动器,
可重构,
变刚度,
动力学模型
|
|
| [1] |
ZHU Y H, WU Q C, CHEN B, et al. Design and evaluation of a novel torque-controllable variable stiffness actuator with reconfigurability[J]. IEEE/ASME Transactions on Mechatronics, 2022, 27(1): 292-303.
|
|
|
| [2] |
BAO G J, PAN L F, FANG H, et al. Academic review and perspectives on robotic exoskeletons[J]. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2019, 27(11): 2294-2304.
|
|
|
| [3] |
徐晨阳,张建斌,陈伟海,等.绳驱动上肢外骨骼康复机器人穿戴机构设计[J].机器人,2021,43(4):463-472.
XU C Y, ZHANG J B, CHEN W H, et al. Design of the fixation mechanism for a cable-driven upper-limb exoskeleton rehabilitation robot[J]. Robot, 2021, 43(4): 463-472.
|
|
|
| [4] |
曲祥旭,曹东兴,张姗.一种扭簧变刚度柔性关节的设计与研究[J].机械工程学报,2021,57(13):114-123. doi:10.3901/jme.2021.13.114
QU X X, CAO D X, ZHANG S. Design and research of compliant joint with variable stiffness of torsion spring[J]. Journal of Mechanical Engineering, 2021, 57(13): 114-123.
doi: 10.3901/jme.2021.13.114
|
|
|
| [5] |
VANDERBORGHT B, ALBU-SCHAEFFER A, BICCHI A, et al. Variable impedance actuators: a review[J]. Robotics and Autonomous Systems, 2013, 61(12): 1601-1614.
|
|
|
| [6] |
LIU Y W, CUI S P, SUN Y J. Mechanical design and analysis of a novel variable stiffness actuator with symmetrical pivot adjustment[J]. Frontiers of Mechanical Engineering, 2021, 16(4): 711-725.
|
|
|
| [7] |
BRAUN D J, CHALVET V, CHONG T, et al. Variable stiffness spring actuators for low-energy-cost human augmentation[J]. IEEE Transactions on Robotics, 2019, 35(6): 1435-1449.
|
|
|
| [8] |
郭俊改.一体化可变刚度旋转型机器人关节结构设计与分析[D].天津:河北工业大学,2021:2-10.
GUO J G. Design and analysis of joint structure of integrated variable stiffness rotating robot[D]. Tianjin: Hebei University of Technology, 2021: 2-10.
|
|
|
| [9] |
JAFARI A, TSAGARAKIS N G, CALDWELL D G. A novel intrinsically energy efficient actuator with adjustable stiffness (AwAS)[J]. IEEE/ASME Transactions on Mechatronics, 2013, 18(1): 355-365.
|
|
|
| [10] |
SUN J T, GUO Z, ZHANG Y B, et al. A novel design of serial variable stiffness actuator based on an Archimedean spiral relocation mechanism[J]. IEEE/ASME Transactions on Mechatronics, 2018, 23(5): 2121-2131.
|
|
|
| [11] |
WOLF S, FEENDERS J. Modeling and benchmarking energy efficiency of variable stiffness actuators on the example of the DLR FSJ [C]//2016 IEEE/RSJ International Conference on Intelligent Robots and Systems, Daejeon, Oct. 9-14, 2016.
|
|
|
| [12] |
史延雷,张小俊,张明路.主-被动复合变刚度柔性关节设计与分析[J].机械工程学报,2018,54(3):55-62. doi:10.3901/jme.2018.03.055
SHI Y L, ZHANG X J, ZHANG M L. Design and analysis of the active‒passive composite compliant joint with variable stiffness[J]. Journal of Mechanical Engineering, 2018, 54(3): 55-62.
doi: 10.3901/jme.2018.03.055
|
|
|
| [13] |
CHOI J, HONG S, LEE W, et al. A robot joint with variable stiffness using leaf springs[J]. IEEE Transactions on Robotics, 2011, 27(2): 229-238.
|
|
|
| [14] |
吴瑞德,常英珂,陈小松,等.基于形状记忆合金的分离装置驱动机构研究[J].火工品,2020,196(5):10-13. doi:10.3969/j.issn.1003-1480.2020.05.003
WU R D, CHANG Y K, CHEN X S, et al. Research on driving mechanism of separation device based on shape memory alloy[J]. Initiators & Pyrotechnics, 2020, 196(5): 10-13.
doi: 10.3969/j.issn.1003-1480.2020.05.003
|
|
|
| [15] |
王文东,孙铜森,袁小庆,等.面向人机交互的机器人变 刚度柔性驱动器设计与分析[J].西北工业大学学报,2019,37(2):242-248. doi:10.1051/jnwpu/20193720242
WANG W D, SUN T S, YUAN X Q, et al. Design and analysis of variable flexible actuator for human-robot interaction[J]. Journal of Northwestern Polytechnical University, 2019, 37(2): 242-248.
doi: 10.1051/jnwpu/20193720242
|
|
|
| [16] |
LI Z Y, BAI S P. A novel revolute joint of variable stiffness with reconfigurability[J]. Mechanism and Machine Theory, 2019, 133: 720-736.
|
|
|
| [17] |
BECKERLE P, VERSTRATEN T, MATHIJSSENC G. Series and parallel elastic actuation: influence of operating positions on design and control[J]. IEEE/ASME Transactions on Mechatronics, 2017, 22(1): 521-529.
|
|
|
| [18] |
LI Z Y, BAI S P, MADSEN O, et al. Design, modeling and testing of a compact variable stiffness mechanism for exoskeletons[J]. Mechanism and Machine Theory, 2020, 151: 103905.
|
|
|
| [19] |
高康平,展梓奎,焦生杰,等.救援机器人柔性关节的设计与稳定性分析[J].机械科学与技术,2020,39(8):1191-1195.
GAO K P, ZHAN Z K, JIAO S J, et al. Design and stability analysis of compliant joint of rescue robot[J]. Mechanical Science and Technology for Aerospace Engineering, 2020, 39(8): 1191-1195.
|
|
|
| [20] |
刘艳立.变刚度柔顺关节的设计与研究[D].北京:中国石油大学,2018:45-48.
LIU Y L. Design and research on variable stiffness of compliant joint[D]. Beijing: China University of Petroleum, 2018: 45-48.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|