| Modeling, Simulation, Analysis and Decision |
|


|
|
|
| Dynamics analysis and experimental research on leg lifting condition of limb-leg crawler foot mechanism |
Fu-qiang ZHAO1,2( ),Te DU1,Bao-yu CHANG1,Zhi-gang NIU2 ),Te DU1,Bao-yu CHANG1,Zhi-gang NIU2 |
1.Heavy Machinery Engineering Research Center of the Ministry of Education, Taiyuan University of Science and Technology, Taiyuan 030024, China
2.Institute of Polar Engineering and Equipment, Taiyuan University of Technology, Taiyuan 030024, China |
|
|
|
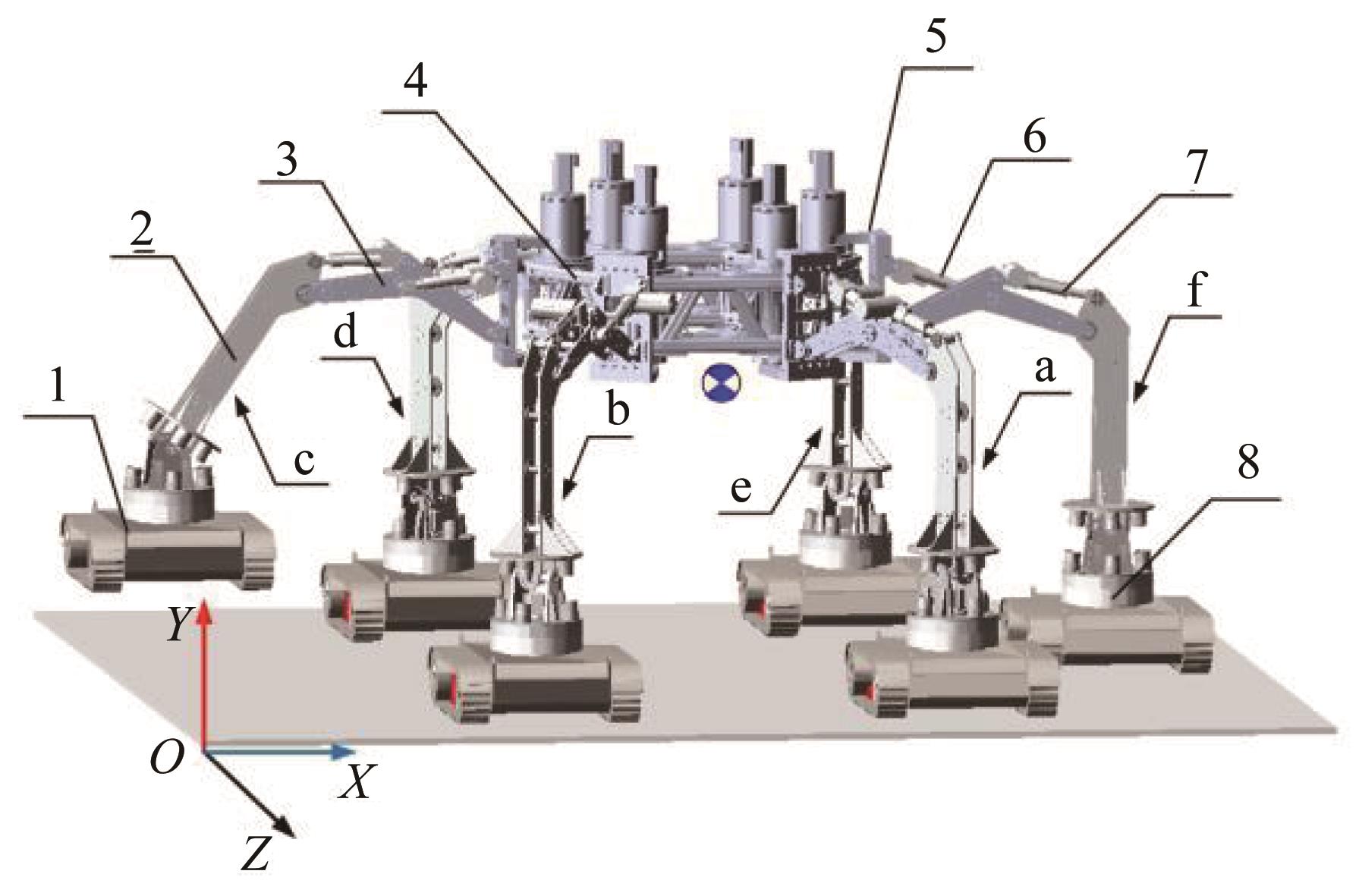
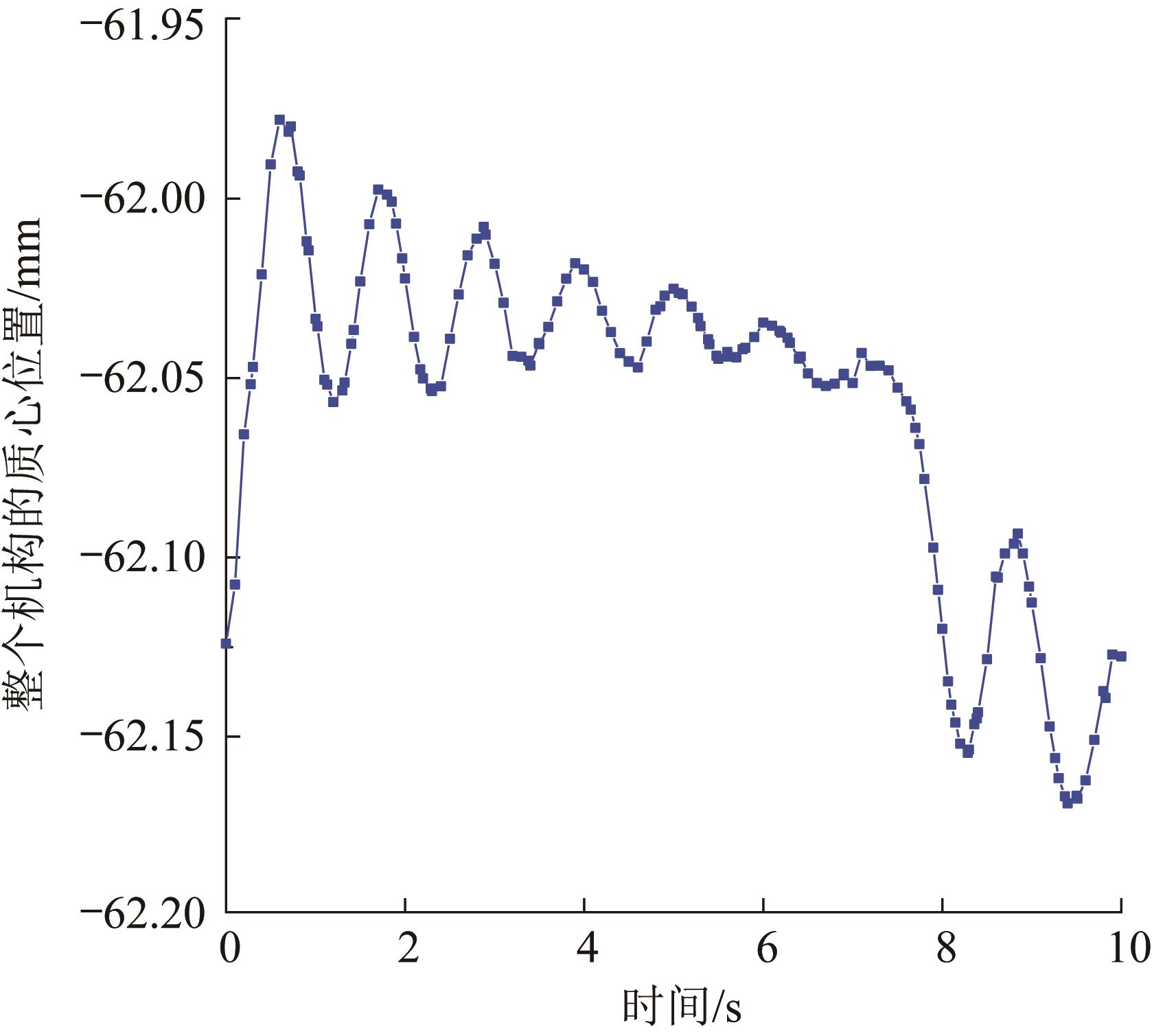
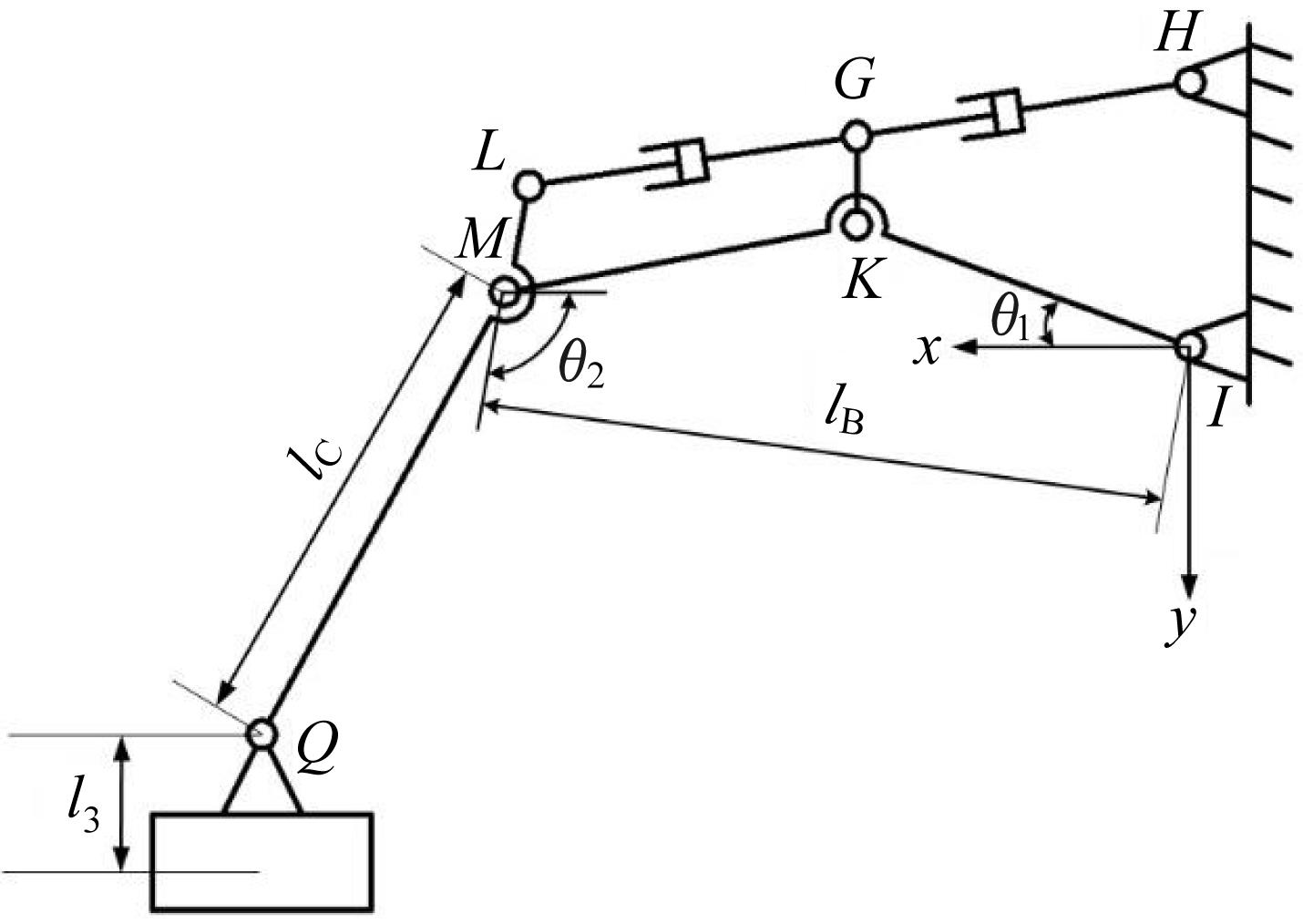
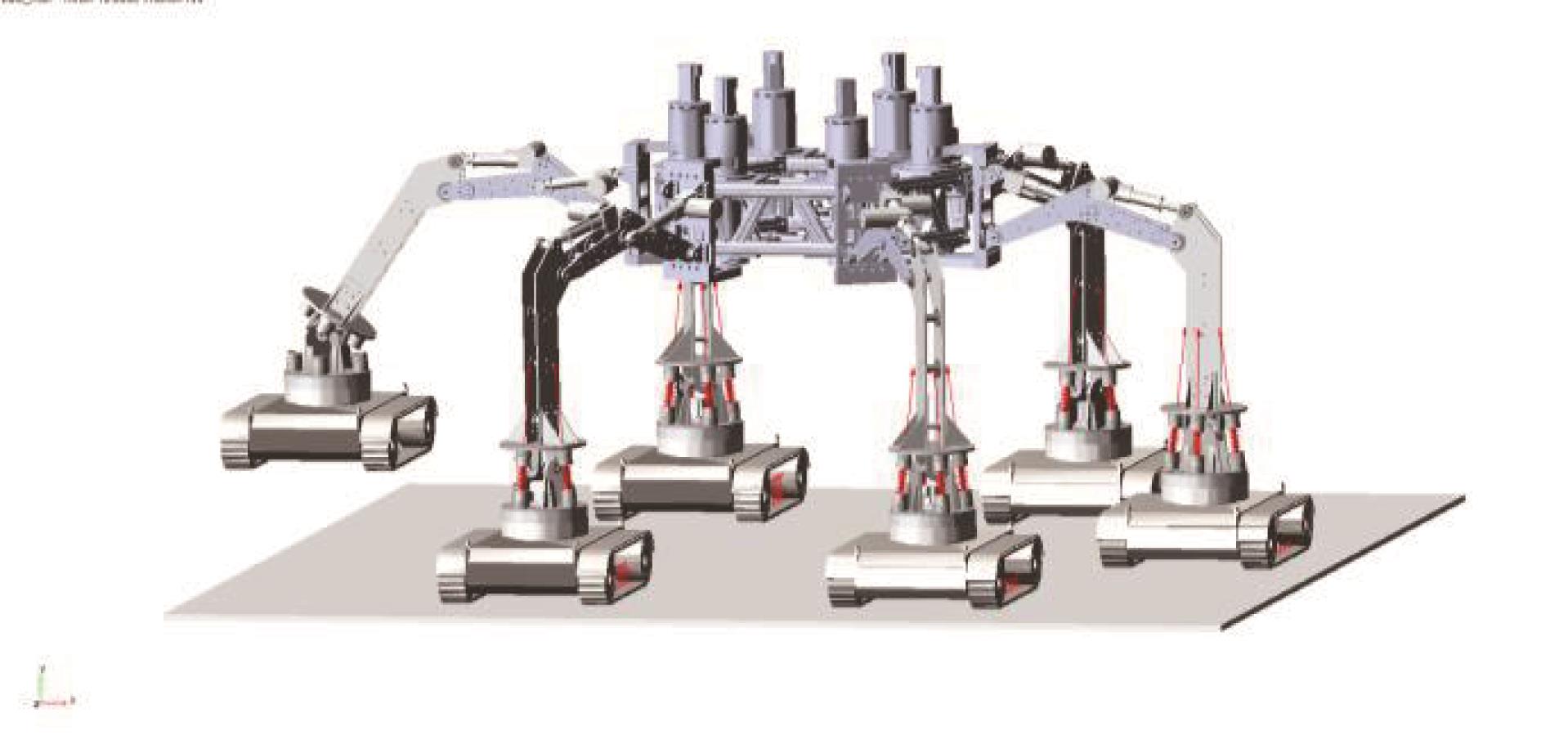
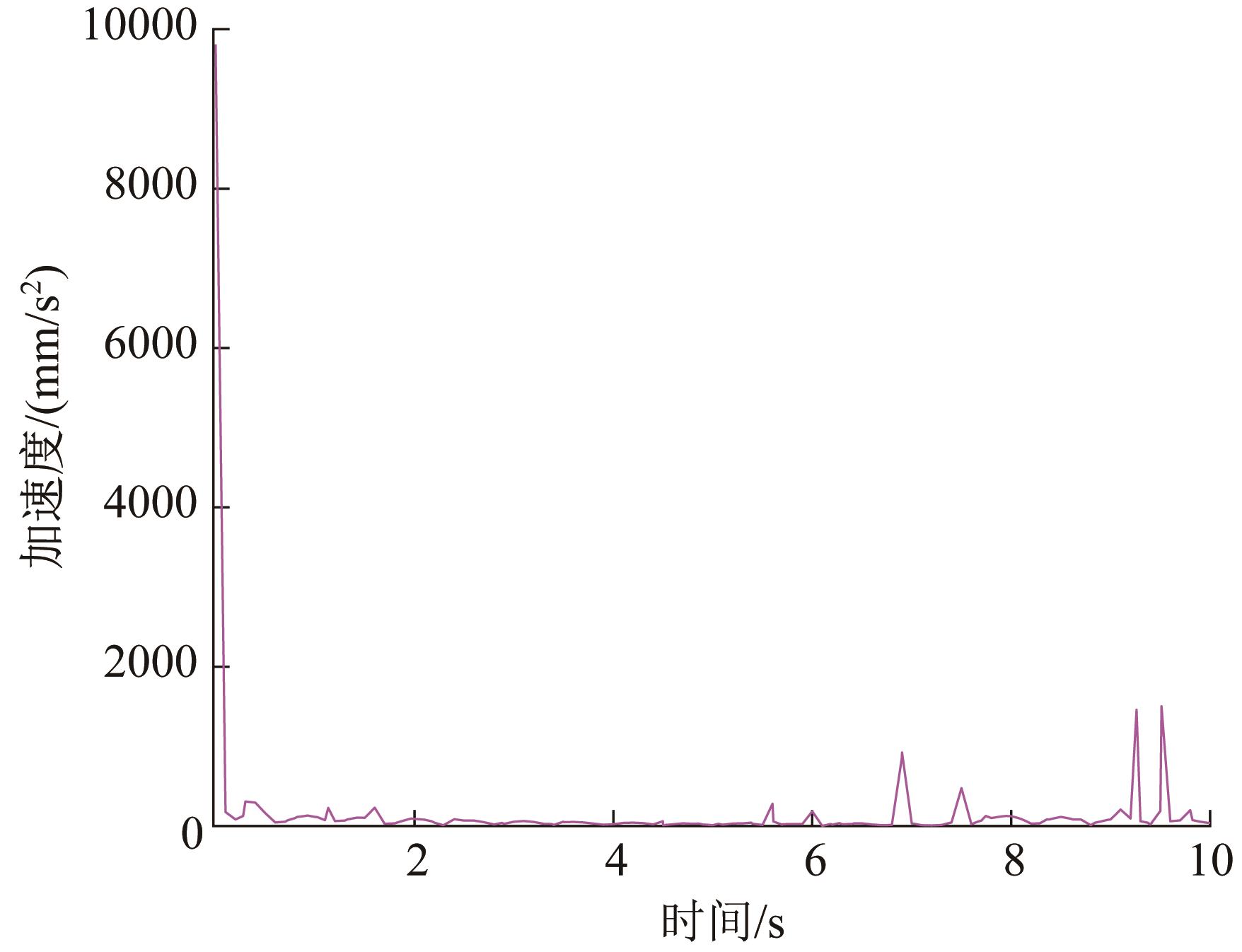
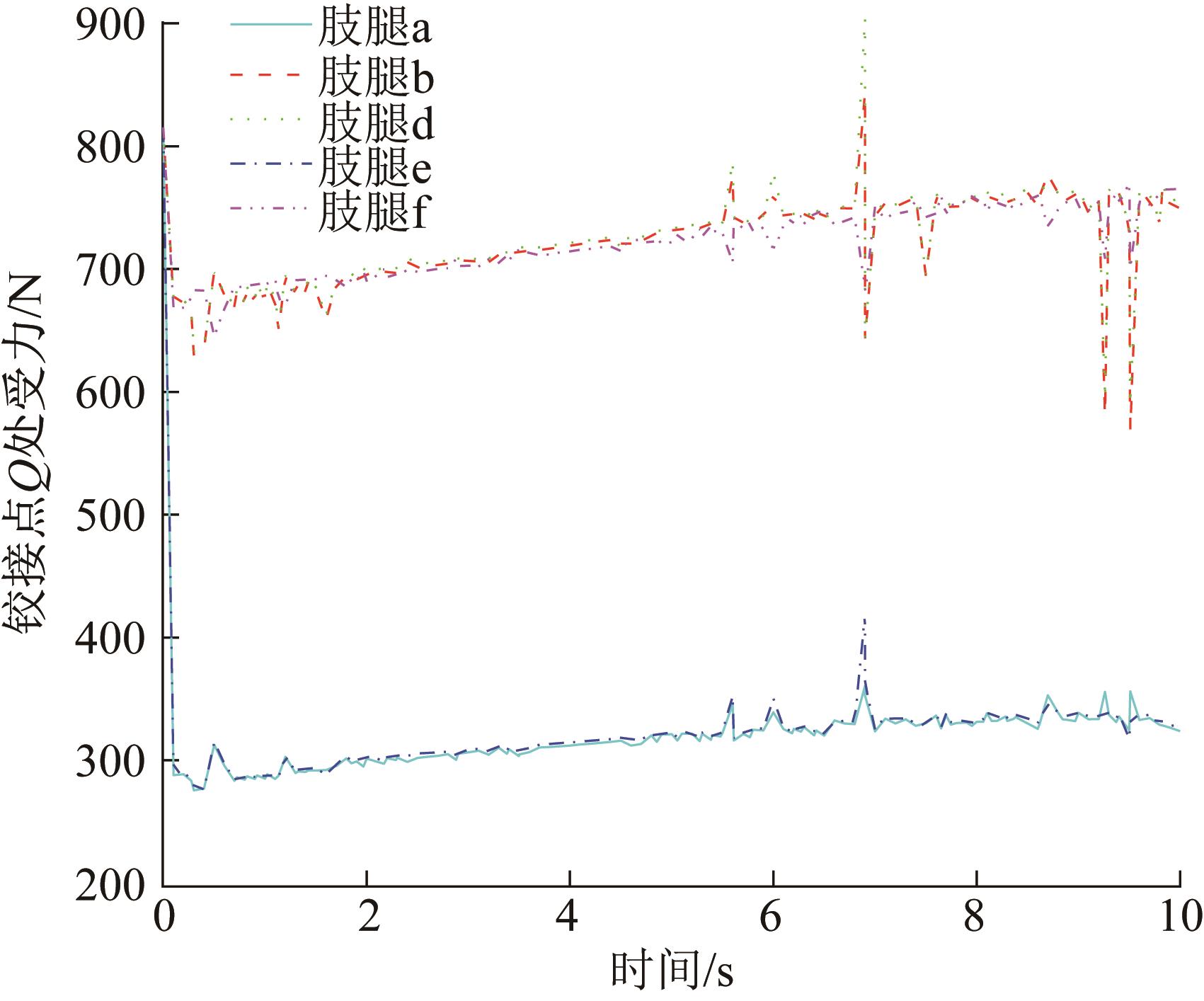
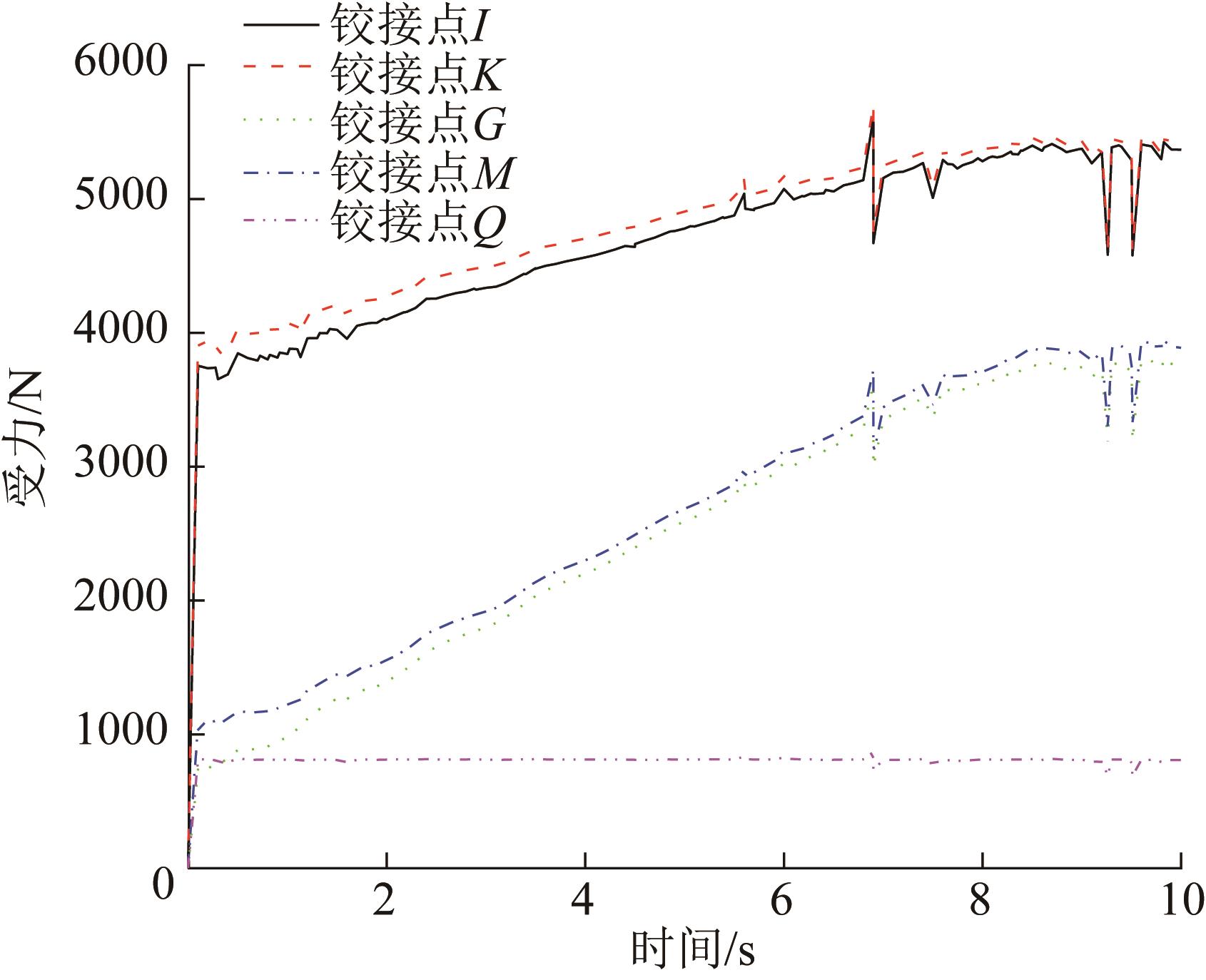
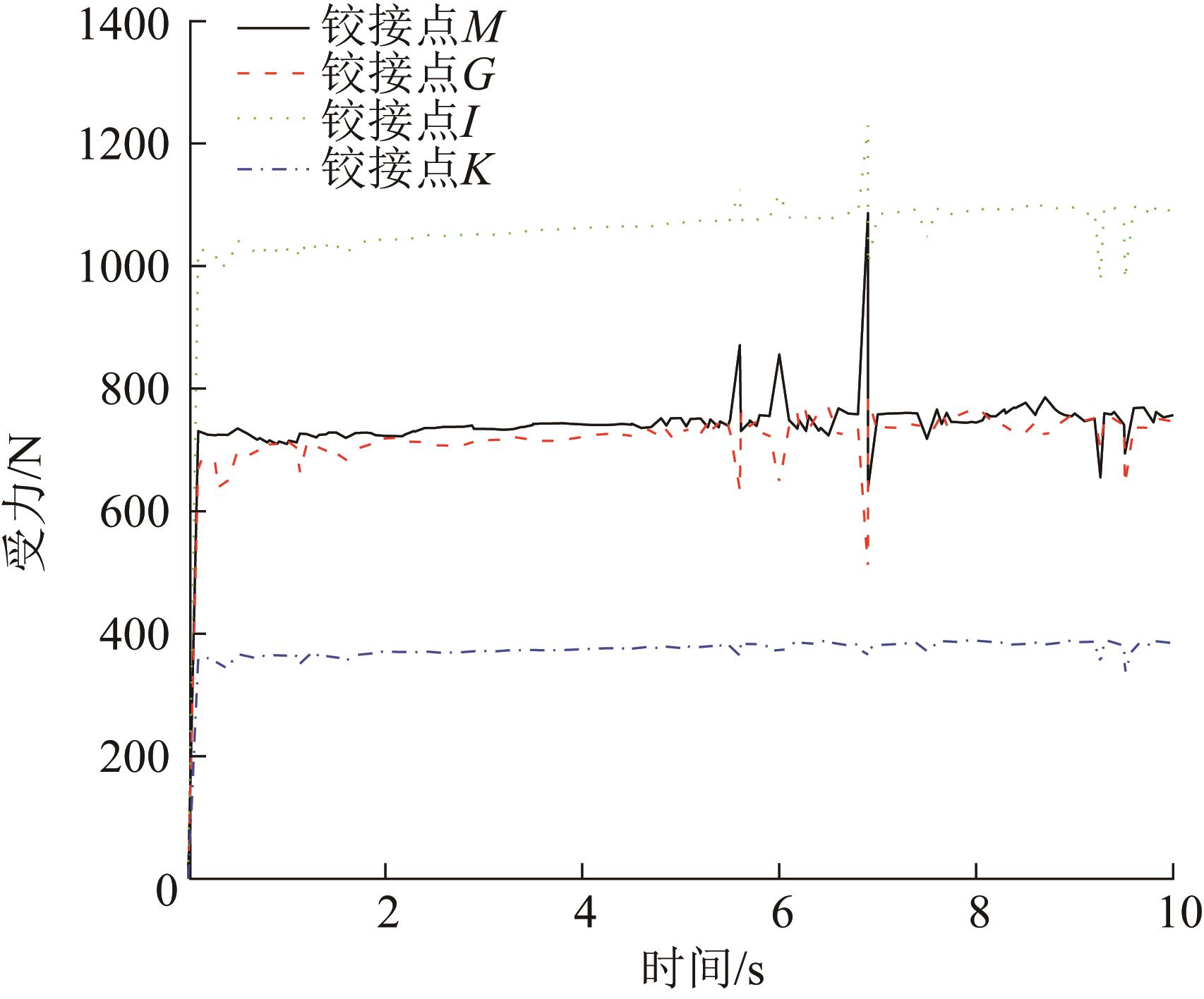
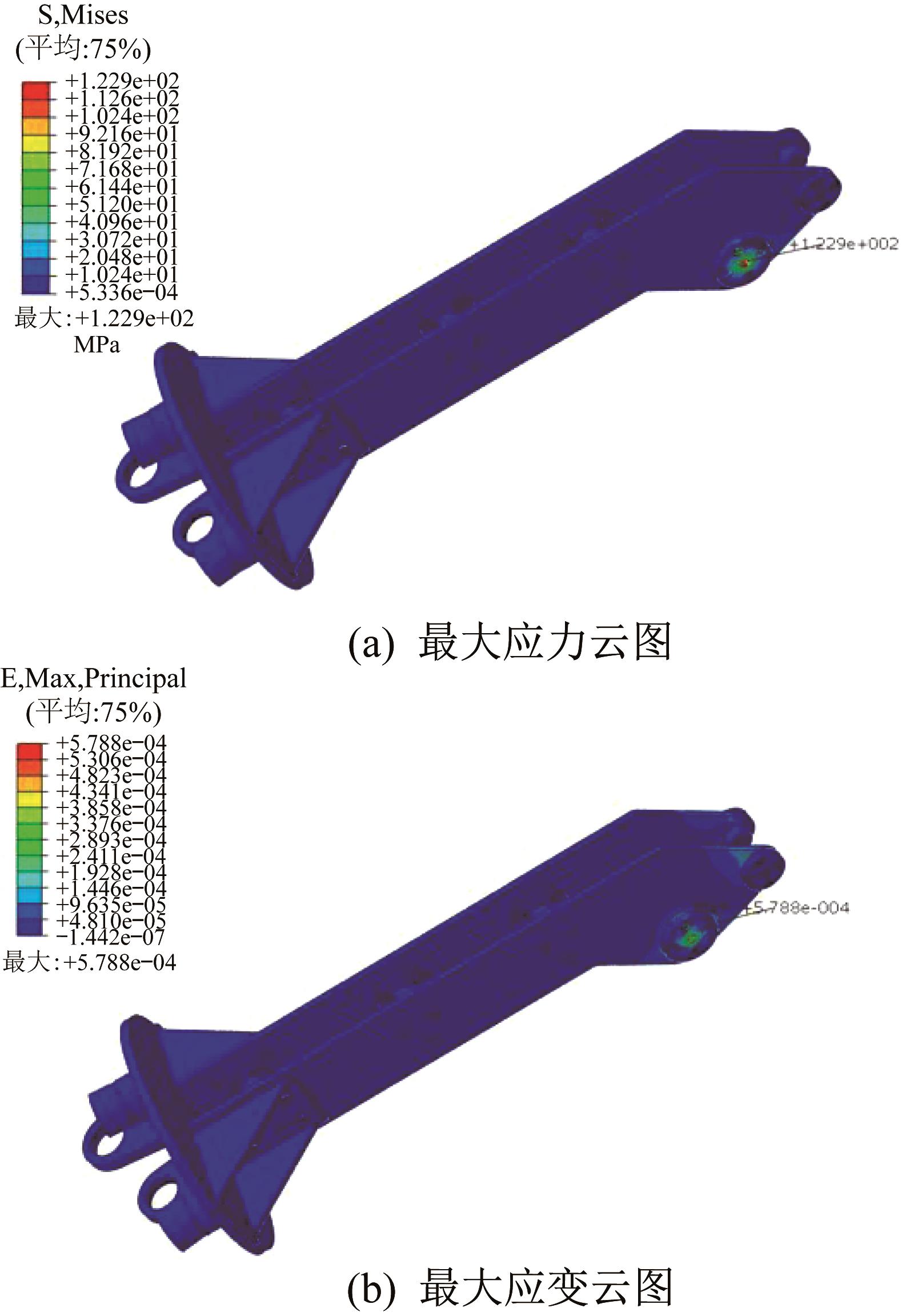
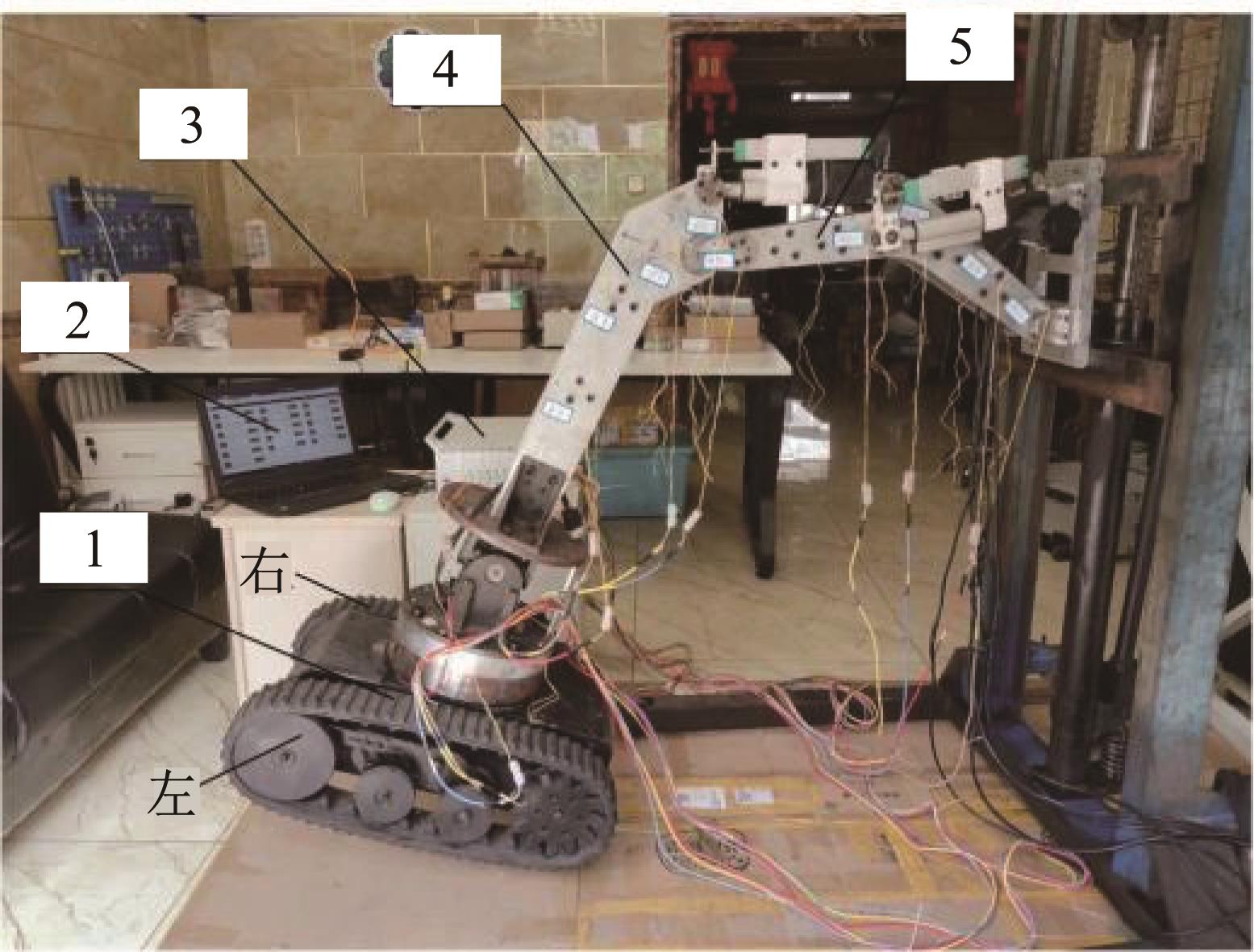
Abstract In order to verify the structural strength of limb-leg systems of the limb-leg crawler foot mechanism, taking the single limb-leg system as the research object, the dynamics model of its lifting condition was established based on the Lagrange method, and the expressions of driving torque of its upper and lower limb joints were derived and verified. At the same time, through the dynamics simulation of single leg lifting condition of the limb-leg crawler foot mechanism, the time-domain variation law of the force on each hinge point of its supporting leg and lifting leg was revealed, and the strength of the lifting leg with large force was simulated by finite element method and verified by experiment. The results showed that, under the single leg lifting condition of the limb-leg crawler foot mechanism, the maximum stress of the upper limb of the lifting leg was 165.9 MPa, with a safety factor of 3.04, and the maximum stress of the lower limb was 122.9 MPa, with a safety factor of 2.81, which met the strength requirements during the lifting process of a single leg; the relative error between the simulated value and the test value of the maximum stress at each hinge point of the lifting leg was within 18%. The research results verify the correctness of the dynamics analysis method for the leg lifting condition of the limb-leg crawler foot mechanism and the safety and rationality of its structure, which can provide a reference for the design and application of other limb-leg mechanism.
|
|
Received: 22 November 2021
Published: 05 September 2022
|
|
|
肢腿履带足机构抬腿工况动力学分析与实验研究
为验证肢腿履带足机构肢腿系统的结构强度,以单肢腿系统为研究对象,基于拉格朗日法建立其抬起工况的动力学模型,推导了其上、下肢腿关节驱动力矩的表达式并予以验证。同时,通过对肢腿履带足机构单腿抬起工况进行动力学仿真,揭示了其支撑腿、抬起腿各铰接点所受力的时域变化规律,并对受力最大的抬起腿的强度进行了有限元模拟与实验验证。结果表明:在肢腿履带足机构单腿抬起工况下,其抬起腿上肢腿的最大应力为165.9 MPa,安全系数为3.04,下肢腿的最大应力为122.9 MPa,安全系数为2.81,均满足单腿抬起过程中的强度要求;抬起腿各铰接点处最大应力的模拟值与测试值的相对误差均在18%以内。研究结果验证了肢腿履带足机构抬腿工况动力学分析方法的正确性以及其结构的安全性和合理性,可为其他肢腿型机构的设计及应用提供参考。
关键词:
肢腿履带足机构,
拉格朗日法,
抬腿工况,
动力学建模,
实验验证
|
|
| [1] |
苏学满,孙丽丽,许德章.六足矿井搜救探测机器人越障动力学建模与分析[J].机械设计,2016,33(2):100-104. doi:10.13841/j.cnki.jxsj.2016.02.020
SU Xue-man, SUN Li-li, XU De-zhang. Dynamic modeling and analysis for obstacle negotiation of mine rescue detection hexapod robot[J]. Journal of Machine Design, 2016, 33(2): 100-104.
doi: 10.13841/j.cnki.jxsj.2016.02.020
|
|
|
| [2] |
程乾,蒋刚.电液驱动六足机器人三维空间力学分析[J].机械传动,2015,39(1):43-47. doi:JournalArticle/5b3b7878c095d70f00773530
CHENG Qian, JIANG Gang. Three-dimensional space mechanics analysis of hexapod robot with electro-hydraulic driven[J]. Journal of Mechanical Transmission, 2015, 39(1): 43-47.
doi: JournalArticle/5b3b7878c095d70f00773530
|
|
|
| [3] |
边兵兵.基于ADAMS的机械臂刚柔耦合动态特性分析[J].包装工程,2018,39(9):177-181. doi:10.19554/j.cnki.1001-3563.2018.09.031
BIAN Bing-bing. Rigid-flexible coupling dynamic characteristics of manipulator based on ADAMS[J]. Packaging Engineering, 2018, 39(9): 177-181.
doi: 10.19554/j.cnki.1001-3563.2018.09.031
|
|
|
| [4] |
江维,吴功平,王伟,等.带电作业机器人机械臂动力学建模与运动规划[J].工程科学学报,2016,38(6):867-875. doi:10.13374/j.issn2095-9389.2016.06.018
JIANG Wei, WU Gong-ping, WANG Wei, et al. Manipulator dynamic modeling and motion planning for live working robot[J]. Chinese Journal of Engineering, 2016, 38(6): 867-875.
doi: 10.13374/j.issn2095-9389.2016.06.018
|
|
|
| [5] |
申浩宇,吴洪涛,陈柏,等.多自由度串联机器人的高效率反向动力学建模方法[J].中国机械工程,2016,27(1):20-24. doi:10.3969/j.issn.1004-132X.2016.01.004
SHEN Hao-yu, WU Hong-tao, CHEN Bai, et al. High effective inverse dynamics modelling for multi-DOF serial robots[J]. China Mechanical Engineering, 2016, 27(1): 20-24.
doi: 10.3969/j.issn.1004-132X.2016.01.004
|
|
|
| [6] |
宁会峰,鄢志彬,程荣展,等.光伏组件清扫机械臂动力学建模与分析[J].太阳能学报,2020,41(12):138-145.
NING Hui-feng, YAN Zhi-bin, CHENG Rong-zhan, et al. Dynamic modeling and analysis of photovoltaic component cleaning manipulator[J]. Acta Energiae Solaris Sinica, 2020, 41(12): 138-145.
|
|
|
| [7] |
XIE H, WANG X H, WANG T, et al. Dynamics analysis and modeling of a hexapod robot with single drive[J]. Advanced Materials Research, 2013, 650: 364-368. doi:10.4028/www.scientific.net/amr.650.364
doi: 10.4028/www.scientific.net/amr.650.364
|
|
|
| [8] |
SORIN M O, NIŢULESCU M. Hexapod robot leg dynamic simulation and experimental control using MATLAB[J]. IFAC Proceedings Volumes, 2012, 45(6): 895-899. doi:10.3182/20120523-3-ro-2023.00335
doi: 10.3182/20120523-3-ro-2023.00335
|
|
|
| [9] |
DING Xi-lun, LI Ke-jia, XU Kun. Dynamics and wheel's slip ratio of a wheel-legged robot in wheeled motion considering the change of height[J]. Chinese Journal of Mechanical Engineering, 2012, 25(5): 1060-1067. doi:10.3901/cjme.2012.05.1060
doi: 10.3901/cjme.2012.05.1060
|
|
|
| [10] |
STAICU S. Dynamics equations of a mobile robot provided with caster wheel[J]. Nonlinear Dynamics, 2009, 58: 237-248. doi:10.1007/s11071-009-9474-3
doi: 10.1007/s11071-009-9474-3
|
|
|
| [11] |
黄鸣辉,黄冠雅,孙中林,等.考虑作业动态特性的挖掘机工装结构强度分析[J].中国工程机械学报,2017,15(5):426-429. doi:10.15999/j.cnki.311926.2017.05.010
HUANG Ming-hui, HUANG Guan-ya, SUN Zhong-lin, et al. Structure strength analysis of working device of hydraulic excavator considering dynamic working characteristics[J]. Chinese Journal of Construction Machinery, 2017, 15(5): 426-429.
doi: 10.15999/j.cnki.311926.2017.05.010
|
|
|
| [12] |
任志贵,陈进,王树春,等.液压挖掘机的动应力测试与瞬态分析[J].华南理工大学学报(自然科学版),2014,42(1):22-28. doi:10.3969/j.issn.1000-565X.2014.01.005
REN Zhi-gui, CHEN Jin, WANG Shu-chun, et al. Dynamic stress test and transient analysis of hydraulic excavator[J]. Journal of South China University of Technology (Natural Science Edition), 2014, 42(1): 22-28.
doi: 10.3969/j.issn.1000-565X.2014.01.005
|
|
|
| [13] |
邢伟,陈威,董强,等.巨型机械臂结构动态应力测试与强度分析[J].机床与液压,2020,48(10):76-79. doi:10.3969/j.issn.1001-3881.2020.10.015
XING Wei, CHEN Wei, DONG Qiang, et al. Test and analysis on structure dynamic stress of giant robot arm[J]. Machine Tool & Hydraulic, 2020, 48(10): 76-79.
doi: 10.3969/j.issn.1001-3881.2020.10.015
|
|
|
| [14] |
程靖,陈力.闭链双臂空间机器人动力学建模及力矩受限情况下载荷运动自适应控制[J].工程力学,2017,34(2):235-241. doi:10.6052/j.issn.1000-4750.2015.07.0599
CHENG Jing, CHEN Li. Dynamics for dual-arm floating space robot with closed chain and adaptive control for object motion with limited torque[J]. Engineering Mechanics, 2017, 34(2): 235-241.
doi: 10.6052/j.issn.1000-4750.2015.07.0599
|
|
|
| [15] |
仇鑫,尤晶晶,徐帅,等.Stewart衍生型并联机器人的拓扑构型及结构模型[J].机械科学与技术,2021,40(5):678-689. doi:10.13433/j.cnki.1003-8728.20200104
QIU Xin, YOU Jing-jing, XU Shuai, et al. Topological configuration and structural model of Stewart derivative parallel robot[J]. Mechanical Science and Technology for Aerospace Engineering, 2021, 40(5): 678-689.
doi: 10.13433/j.cnki.1003-8728.20200104
|
|
|
| [16] |
刘广军,刘可臻,孙波,等.基于刚‒柔耦合的反铲液压挖掘机工作装置多体动力学分析与仿真[J].同济大学学报(自然科学版),2021,49(7):1053-1060. doi:10.11908/j.issn.0253-374x.20507
LIU Guang-jun, LIU Ke-zhen, SUN Bo, et al. Multi-body dynamic analysis and simulation of backhoe hydraulic excavator working device based on rigid-flexible coupling[J]. Journal of Tongji University (Natural Science), 2021, 49(7): 1053-1060.
doi: 10.11908/j.issn.0253-374x.20507
|
|
|
| [17] |
冯豪,杜群贵,孙有平.基于子模型的挖掘机结构瞬态动力学研究[J].华南理工大学学报(自然科学版),2018,46(3):29-34,57. doi:10.3969/j.issn.1000-565X.2018.03.005
FENG Hao, DU Qun-gui, SUN You-ping. Transient dynamics analysis for the structures of the excavator based on sub-modeling method[J]. Journal of South China University of Technology (Natural Science Edition), 2018, 46(3): 29-34, 57.
doi: 10.3969/j.issn.1000-565X.2018.03.005
|
|
|
| [18] |
周欣.基于ADAMS串联机器人运动学仿真与分析评价[J].陕西科技大学学报,2018,36(3):146-151. doi:10.3969/j.issn.1000-5811.2018.03.026
ZHOU Xin. Kinematics simulation and analysis and evaluation of series robot based on ADAMS[J]. Journal of Shaanxi University of Science and Technology, 2018, 36(3): 146-151.
doi: 10.3969/j.issn.1000-5811.2018.03.026
|
|
|
| [19] |
余峰,陈新元. N自由度柔性机械臂通用的动力学建模方法研究[J].振动与冲击,2020,39(16):103-111. doi:10.13465/j.cnki.jvs.2020.16.015
YU Feng, CHEN Xin-yuan. A study on a general dynamic modeling method for N-degree of freedom flexible manipulators[J]. Journal of Vibration and Shock, 2020, 39(16): 103-111.
doi: 10.13465/j.cnki.jvs.2020.16.015
|
|
|
| [20] |
陈学文,潘春梅,王良文,等.基于ADAMS的步行机器人MiniQuad-II机体载荷质量变化对驱动力矩的影响研究[J].机械传动,2013,37(9):18-21. doi:10.16578/j.issn.1004.2539.2013.09.008
CHEN Xue-wen, PAN Chun-mei, WANG Liang-wen, et al. Research of the influences of body load quality changed of walking robot MiniQuad-II on driving moment based on ADAMS[J]. Journal of Mechanical Transmission, 2013, 37(9): 18-21.
doi: 10.16578/j.issn.1004.2539.2013.09.008
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|