| Robotic and Mechanism Design |
|


|
|
|
| Research on flexible manipulator with variable stiffness based on particle blocking mechanism |
Hongyang JIN1( ),Longwang YUE1(),Jingda LIU1,Weiwei ZHENG1,Zhao ZHAO1,Jiahui XU2 ),Longwang YUE1(),Jingda LIU1,Weiwei ZHENG1,Zhao ZHAO1,Jiahui XU2 |
1.School of Mechanical and Electrical Engineering, Henan University of Technology, Zhengzhou 450001, China
2.Zhengzhou Great Wall Scientific Instrument Research Institute Co. , Ltd. , Zhengzhou 450001, China |
|
|
|
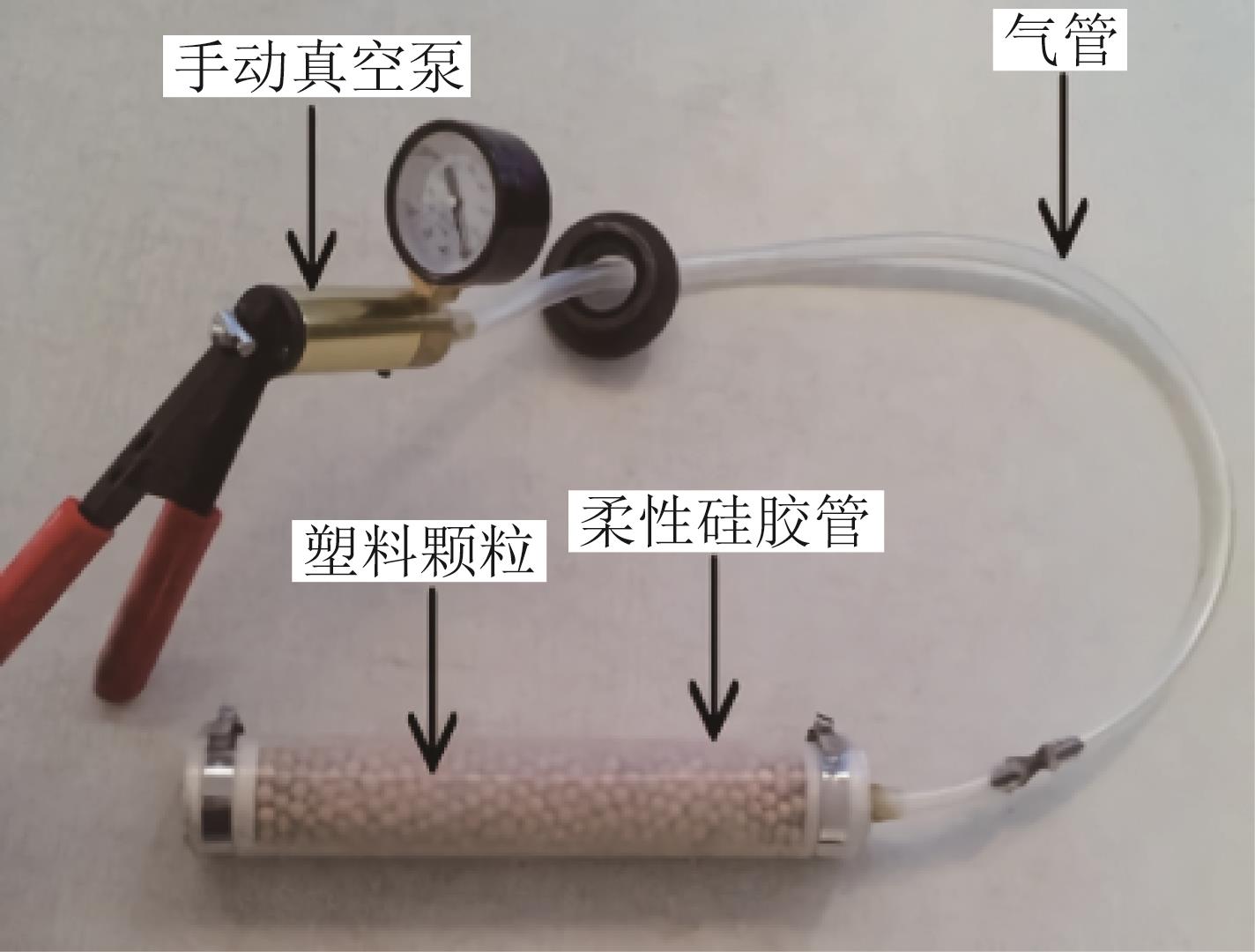
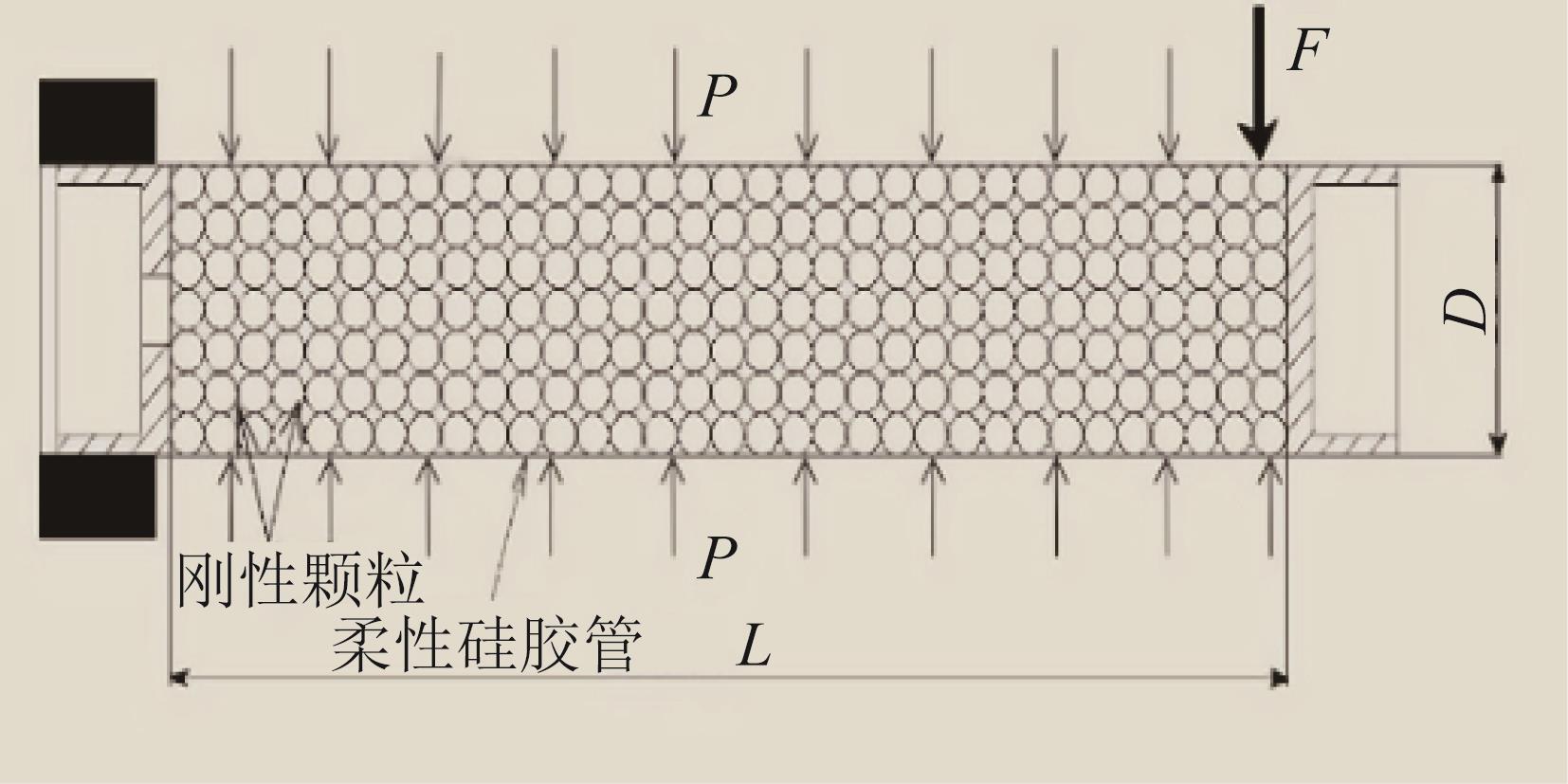
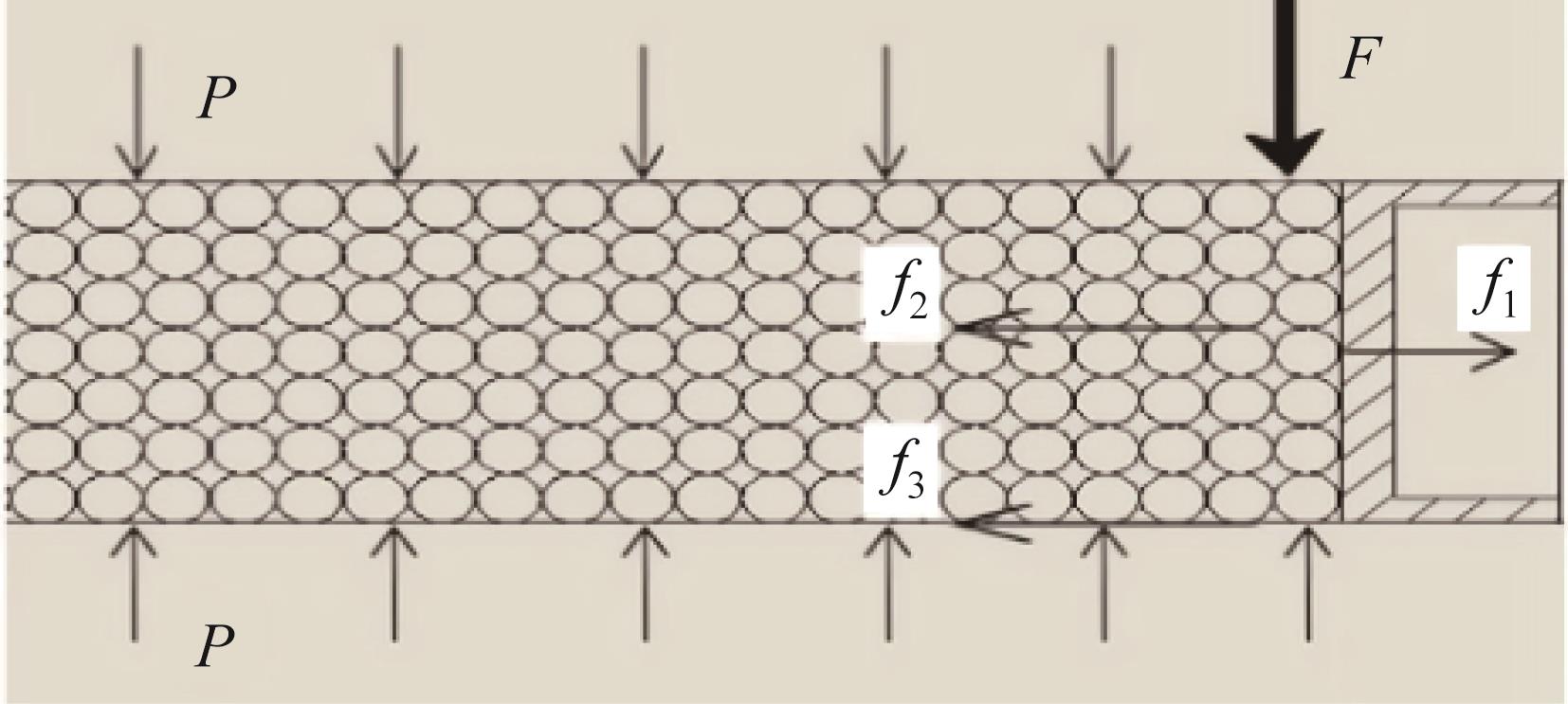
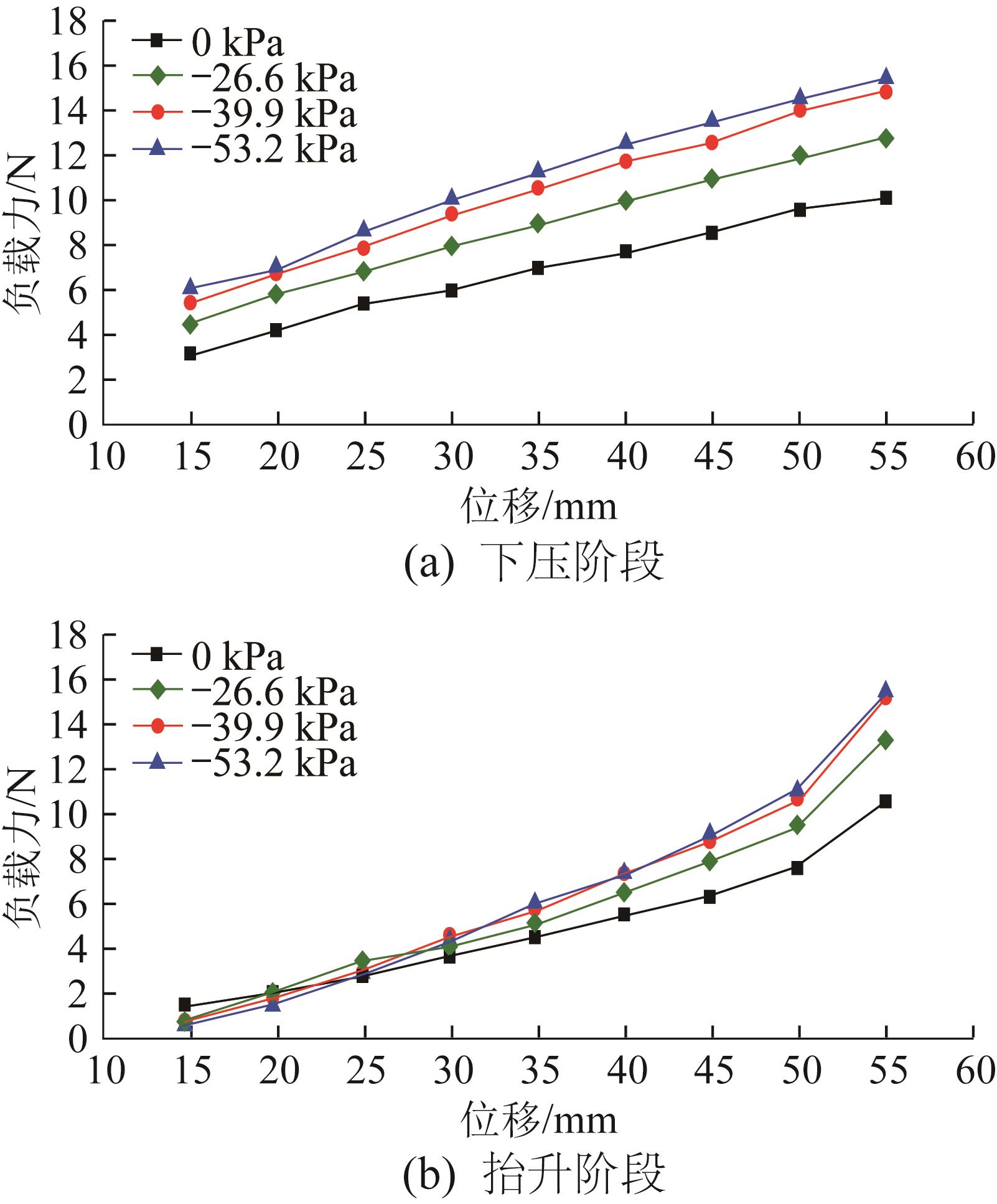
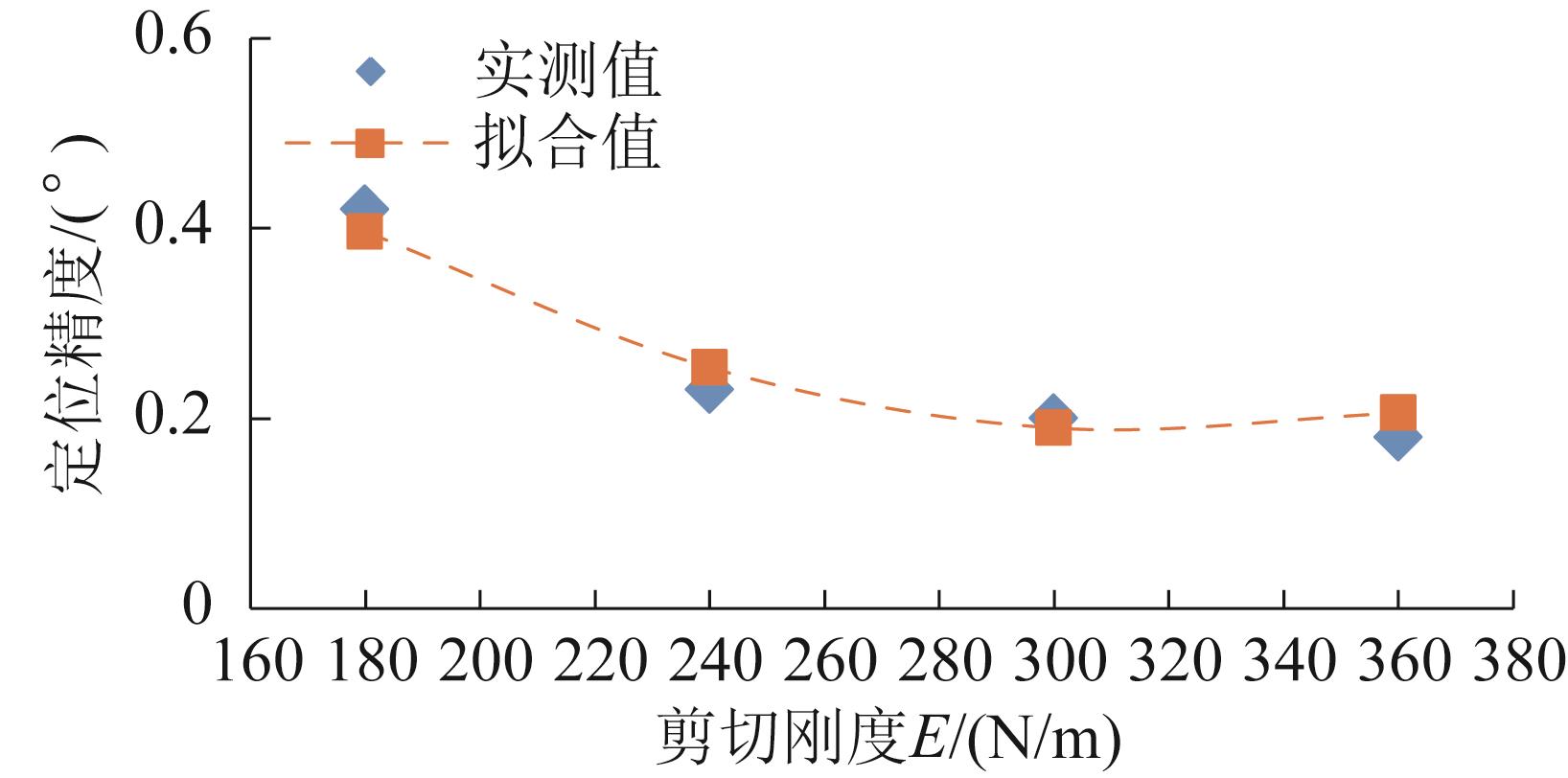
Abstract In order to improve the stiffness and control accuracy of flexible manipulators, the variable stiffness control for flexible manipulators was studied based on the particle blocking mechanism. A variable stiffness rod was formed by filling plastic particles in the flexibility silicone tube, and its stiffness model was built through the theoretical analysis and experimental research. Three variable stiffness rods were symmetrically arranged in parallel to form a variable stiffness flexible manipulator. Based on the established experimental platform, the variable stiffness control and positioning accuracy analysis for the flexible manipulator were carried out. The results showed that particle blocking could not only achieve the stiffness adjustment of the flexible manipulator, but also improve its control accuracy; the shear stiffness of the flexible manipulator was proportional to the vacuum degree of the variable stiffness rod, and the positioning accuracy of the flexible manipulator was also proportional to the shear stiffness of the variable stiffness rod. The research results are of great significance in promoting the wide application of flexible manipulators in the fields of industrial robots and service robots, and improving the safety of human-machine interaction and human-machine collaboration.
|
|
Received: 03 August 2022
Published: 04 September 2023
|
|
|
|
Corresponding Authors:
Longwang YUE
E-mail: jinhong.yang@163.com;yue_lw@163.com
|
基于散粒体阻塞机理的变刚度柔性机械臂研究
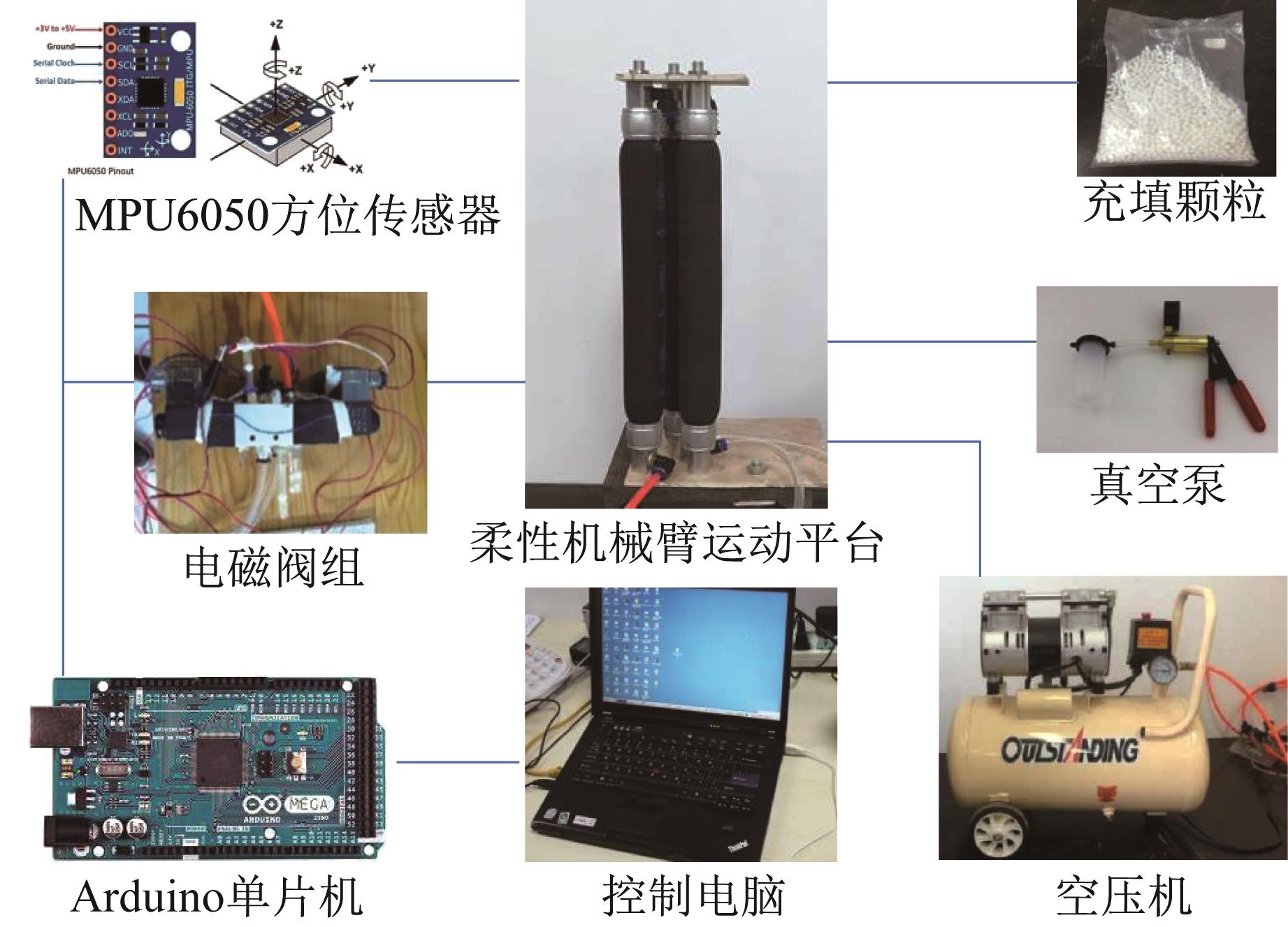
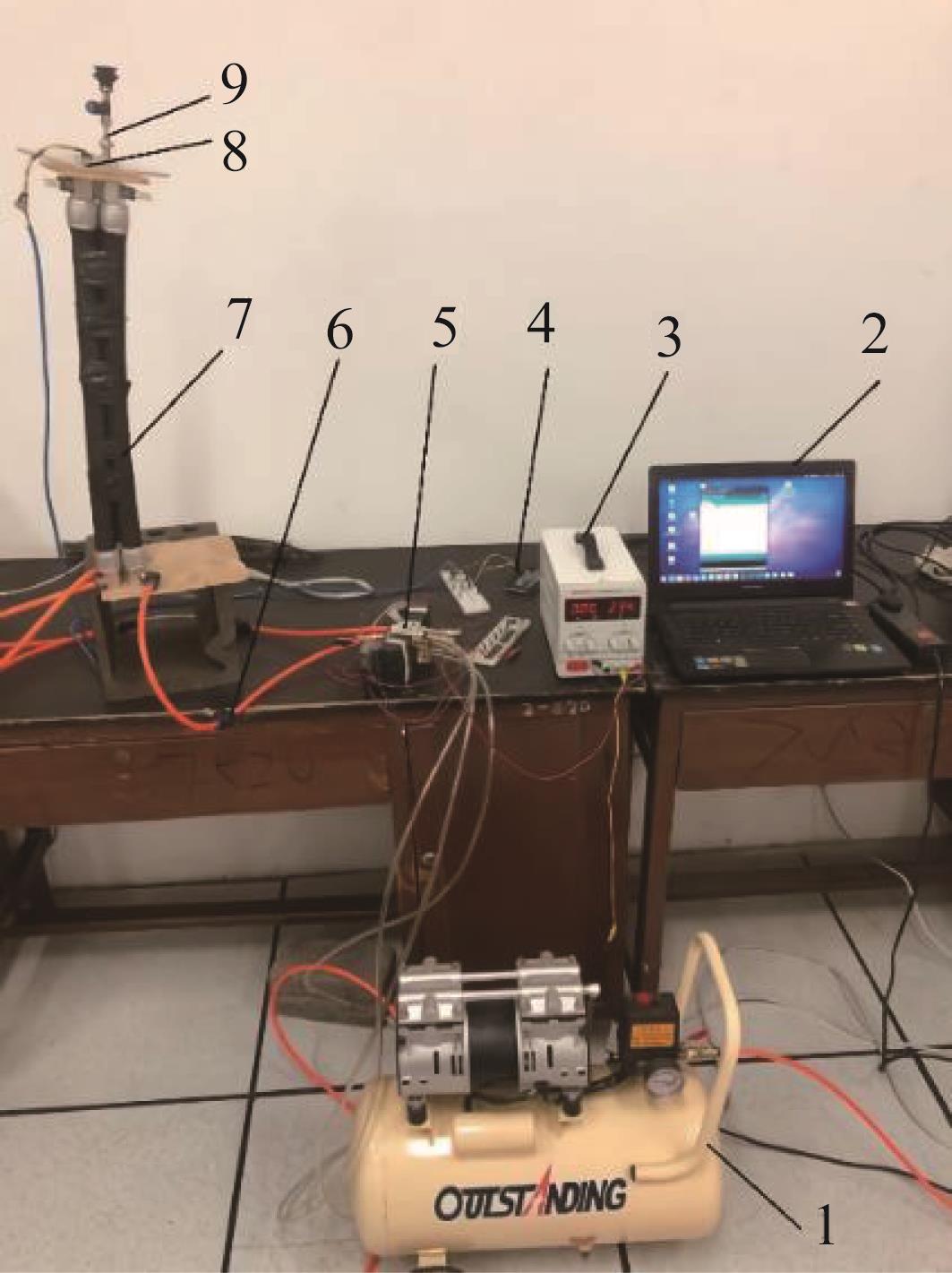
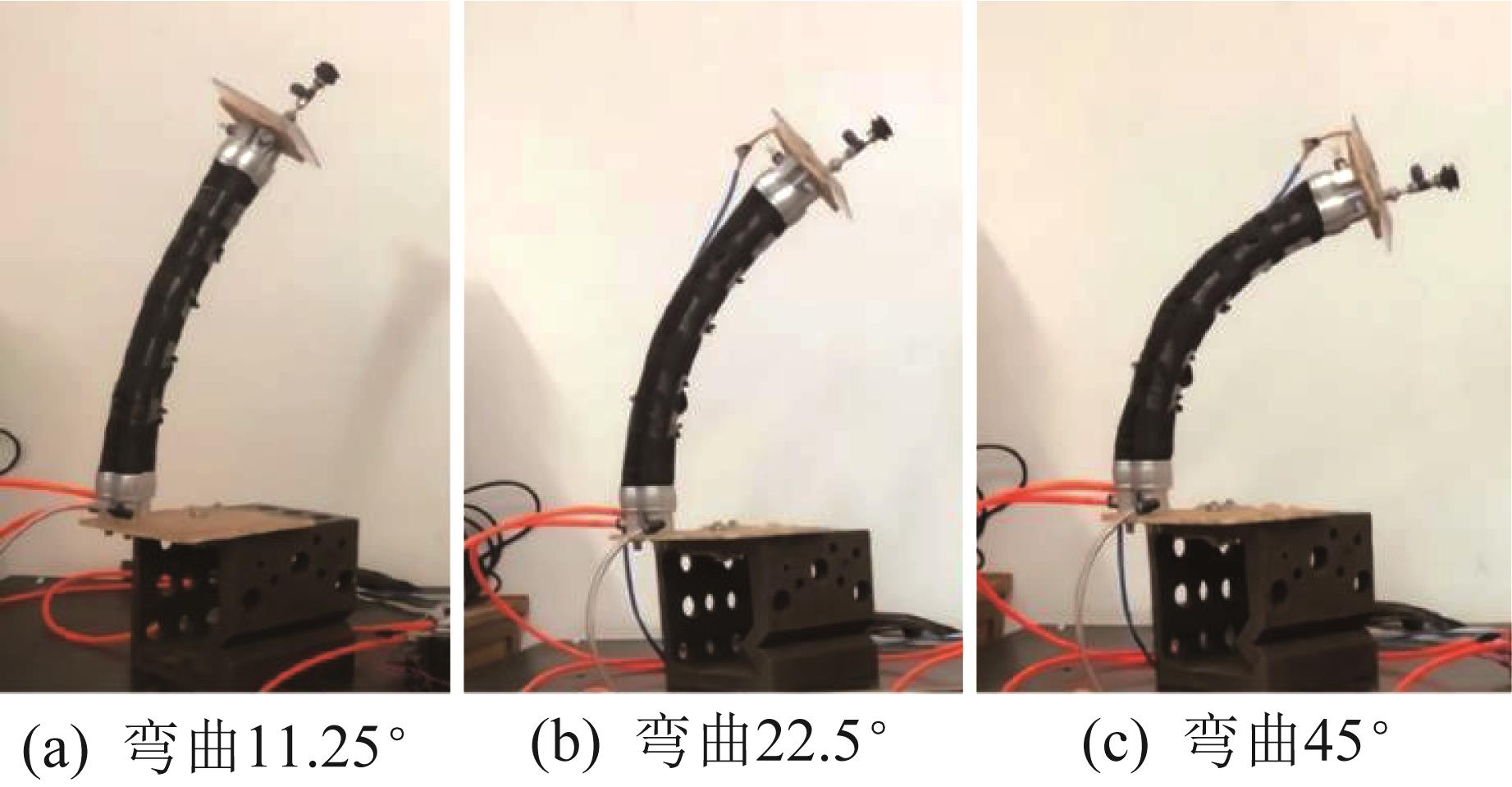
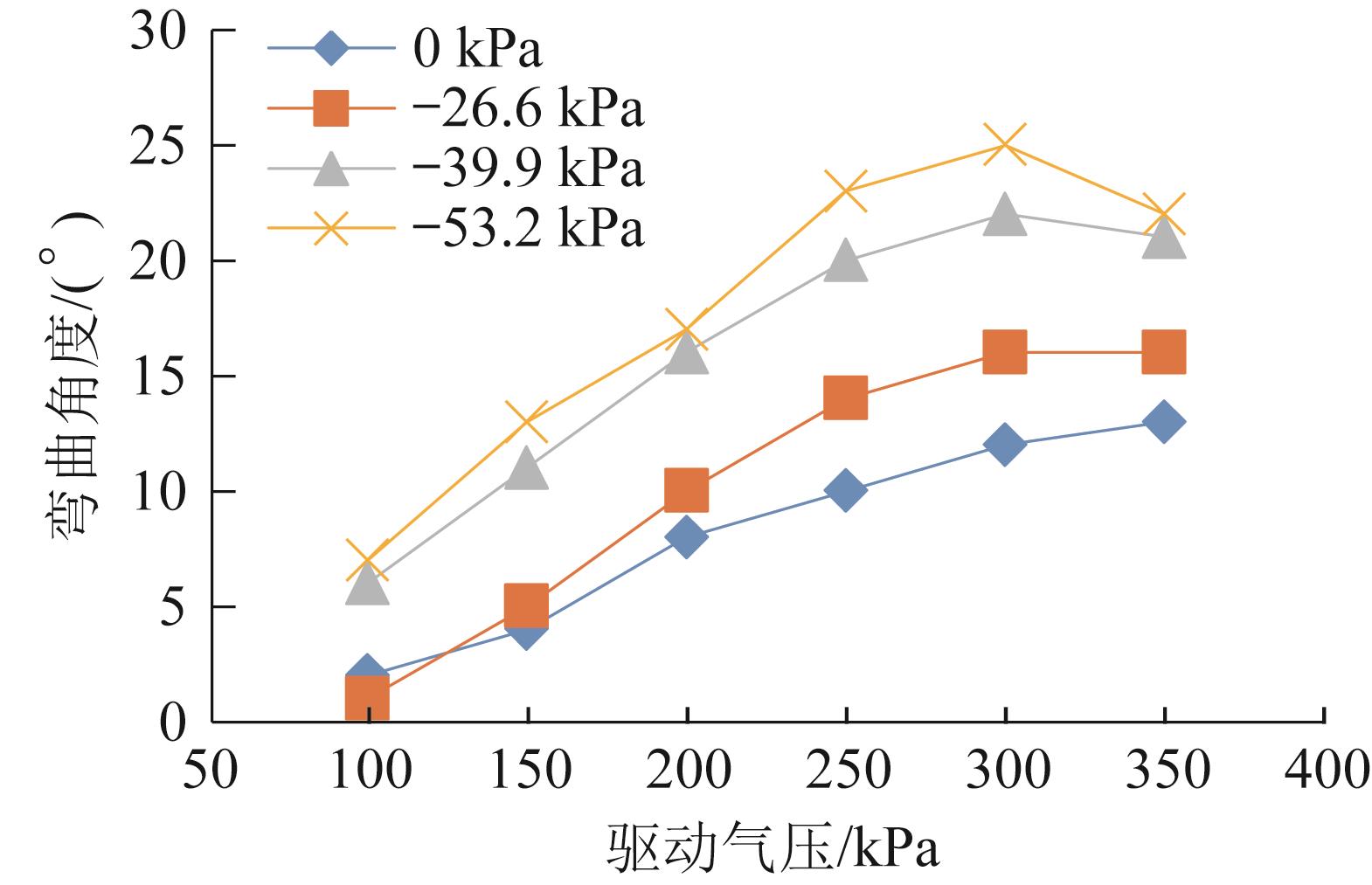
为提高柔性机械臂的刚度和控制精度,基于散粒体阻塞机理对柔性机械臂的变刚度控制进行了研究。在柔性硅胶管内部填充塑料颗粒以构成变刚度杆,并通过理论分析和实验研究构建了其刚度模型。沿圆周方向对称并联布置3根变刚度杆以构成变刚度柔性机械臂,并基于搭建的实验平台对柔性机械臂进行变刚度控制和定位精度分析。结果表明:散粒体阻塞不仅可以实现柔性机械臂的刚度调节,还可以提高其控制精度;柔性机械臂的剪切刚度与变刚度杆的真空度成正比,柔性机械臂的定位精度与变刚度杆的剪切刚度也存在一定的正比关系。研究结果对促进柔性机械臂在工业机器人、服务机器人领域的广泛应用和提高人-机交互、人-机协同安全性有重要意义。
关键词:
变刚度杆,
柔性机械臂,
定位精度,
散粒体阻塞
|
|
| [1] |
O’HERN C S, SILBERT L E, LIU A J, et al. Jamming at zero temperature and zero applied stress: the epitome of disorder[J]. Physical Review E, 2003, 68(1): 011306.
|
|
|
| [2] |
陈煜宇,刘磊,李博,等.柔性驱动与刚度可调结构/功能一体化微创手术操作臂设计制造与性能研究[J].机械工程学报,2018,54(17):53-61. doi:10.3901/jme.2018.17.053
CHEN Y Y, LIU L, LI B, et al. Design, fabrication and performance of a flexible minimally invasive surgery manipulator integrated with soft actuation and variable stiffness[J]. Journal of Mechanical Engineering, 2018, 54(17): 53-61.
doi: 10.3901/jme.2018.17.053
|
|
|
| [3] |
XU F Y, JIANG F Y, JIANG Q S, et al. Soft actuator model for a soft robot with variable stiffness by coupling pneumatic structure and jamming mechanism[J]. IEEE Access, 2020, 8: 26356-26371.
|
|
|
| [4] |
AMEND J R, BROWN E, RODENBERG N, et al. A positive pressure universal gripper based on the jamming of granular material[J]. IEEE Transactions on Robotics, 2012, 28(2): 341-350.
|
|
|
| [5] |
PUTZU F, KONSTANTINOVA J, ALTHOEFER K. Soft particles for granular jamming[C]//Annual Conference Towards Autonomous Robotic Systems, Cham: Springer, 2019: 65-74.
|
|
|
| [6] |
项超群,张颖,郭少飞,等.新型变刚度软体手臂的设计及控制[J].东北大学学报(自然科学版),2018,39(1):93-96,107.
XIANG C Q, ZHANG Y, GUO S F, et al. Design and control of a novel variable stiffness soft arm[J]. Journal of Northeastern University (Natural Science), 2018, 39(1): 93-96, 107.
|
|
|
| [7] |
李康康,胡锦洋,邢普,等.面向柔顺装配装夹的机器人手腕变刚度机理研究[J].机械工程学报,2022,58(19):77-85. doi:10.3901/jme.2022.19.077
LI K K, HU J Y, XING P, et al. Research on variable-stiffness mechanisms of robot wrists for compliant assembling-clamping[J]. Journal of Mechanical Engineering, 2022, 58(19): 77-85.
doi: 10.3901/jme.2022.19.077
|
|
|
| [8] |
STELTZ E, MOZEIKA A, RODENBERG N, et al. JSEL: jamming skin enabled locomotion[C]//2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, MO, Oct. 10-15, 2009.
|
|
|
| [9] |
STELTZ E, MOZEIKA A, REMBISZ J, et al. Jamming as an enabling technology for soft robotics[C]//SPIE Smart Structures and Materials+Nondestructive Evaluation and Health Monitoring, San Diego, California, Mar. 7-11, 2010.
|
|
|
| [10] |
BROWN E, RODENBERG N, AMEND J, et al. Universal robotic gripper based on the jamming of granular material[J]. Proceedings of the National Academy of Sciences, 2010, 107(44): 18809-18814.
|
|
|
| [11] |
段韦婕,秦慧斌,刘荣,等.可重构变刚度柔性驱动器的设计与性能分析[J].工程设计学报,2023,30(2):262-270. doi:10.3785/j.issn.1006-754X.2023.00.028
DUAN W J, QIN H B, LIU R, et al. Design and performance analysis of reconfigurable variable stiffness compliant actuator[J]. Chinese Journal of Engineering Design, 2023, 30(2): 262-270.
doi: 10.3785/j.issn.1006-754X.2023.00.028
|
|
|
| [12] |
CHENG N G, LOBOVSKY M B, KEATING S J, et al. Design and analysis of a robust, low-cost, highly articulated manipulator enabled by jamming of granular media[C]//2012 IEEE International Conference on Robotics and Automation, Saint Paul, MN, May 14-18, 2012.
|
|
|
| [13] |
JIANG A, XYNOGALAS G, DASGUPTA P, et al. Design of a variable stiffness flexible manipulator with composite granular jamming and membrane coupling[C]//2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, Vilamoura-Algarve, Oct. 7-12, 2012.
|
|
|
| [14] |
JIANG A, SECCO E L, WURDEMANN H, et al. Stiffness-controllable octopus-like robot arm for minimally invasive surgery[C]//3rd Joint Workshop on New Technologies for Computer/Robot Assisted Surger, Verona, Sep. 11-13, 2013.
|
|
|
| [15] |
ATHANASSIADIS A G, MISKIN M Z, KAPLAN P, et al. Particle shape effects on the stress response of granular packings[J]. Soft Matter, 2014, 10(1): 48-59.
|
|
|
| [16] |
WALL V, DEIMEL R, BROCK O. Selective stiffening of soft actuators based on jamming[C]//2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, May 26-30, 2015.
|
|
|
| [17] |
石晓磊,岳龙旺.变刚度杆轴向压缩力的实验研究[J].科技创新与生产力,2017(8):91-93. doi:10.3969/j.issn.1674-9146.2017.08.091
SHI X L, YUE L W. Research on axial compression force of variable stiffness link[J]. Sci-tech Innovation and Productivity, 2017(8): 91-93.
doi: 10.3969/j.issn.1674-9146.2017.08.091
|
|
|
| [18] |
ZHANG W H, WEN Z, YOU Z P, et al. Analysis of vibration characteristics of rotating parallel flexible manipulator considering joint elastic constraints[J]. Journal of Vibroengineering, 2022, 24(7): 1324-1339.
|
|
|
| [19] |
姚立纲,李敬仪,东辉.气动软体机械臂模块变刚度性能分析[J].机械工程学报,2020,56(9):36-44. doi:10.3901/jme.2020.09.036
YAO L G, LI J Y, DONG H. Variable stiffness analysis on a pneumatic soft manipulator[J]. Journal of Mechanical Engineering, 2020, 56(9): 36-44.
doi: 10.3901/jme.2020.09.036
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|