Aiming at the key issues in the overall development of snakelike robots, including material selection, structure design and motion realization, a new multi-joint snakelike robot was developed. This snakelike robot was composed of 11 two-degree-of-freedom orthogonal joints, which could achieve three-dimensional high biomimetic motion while ensuring flexibility. The basic gaits of snakelike robot such as meandering, wriggling and tumbling were designed by using the serpentine curve, and an improved obstacle surmounting gait was further proposed. At the same time, the gaits of the snakelike robot were simulated in the V-REP software, and the motion trajectories and efficiency of different gaits were compared. Finally, through the gait experiment of the snakelike robot prototype, the influence of each control parameter in the gait model on the motion waveform and speed of the snakelike robot was analyzed, and the reliability of the body structure and control system of the snakelike robot was verified. The research results have important theoretical significance and practical guiding value for realizing the gait planning and motion control of snakelike robots.
Received: 29 December 2022
Published: 04 September 2023
Fig.1 Structure diagram of multi-joint snakelike robot
Fig.2 Structure of orthogonal joint of snakelike robot
Fig.3 Head and tail structure of snakelike robot
Fig.4 Joint shell structure of snakelike robot
Fig.5 Head and tail shell structure of snakelike robot
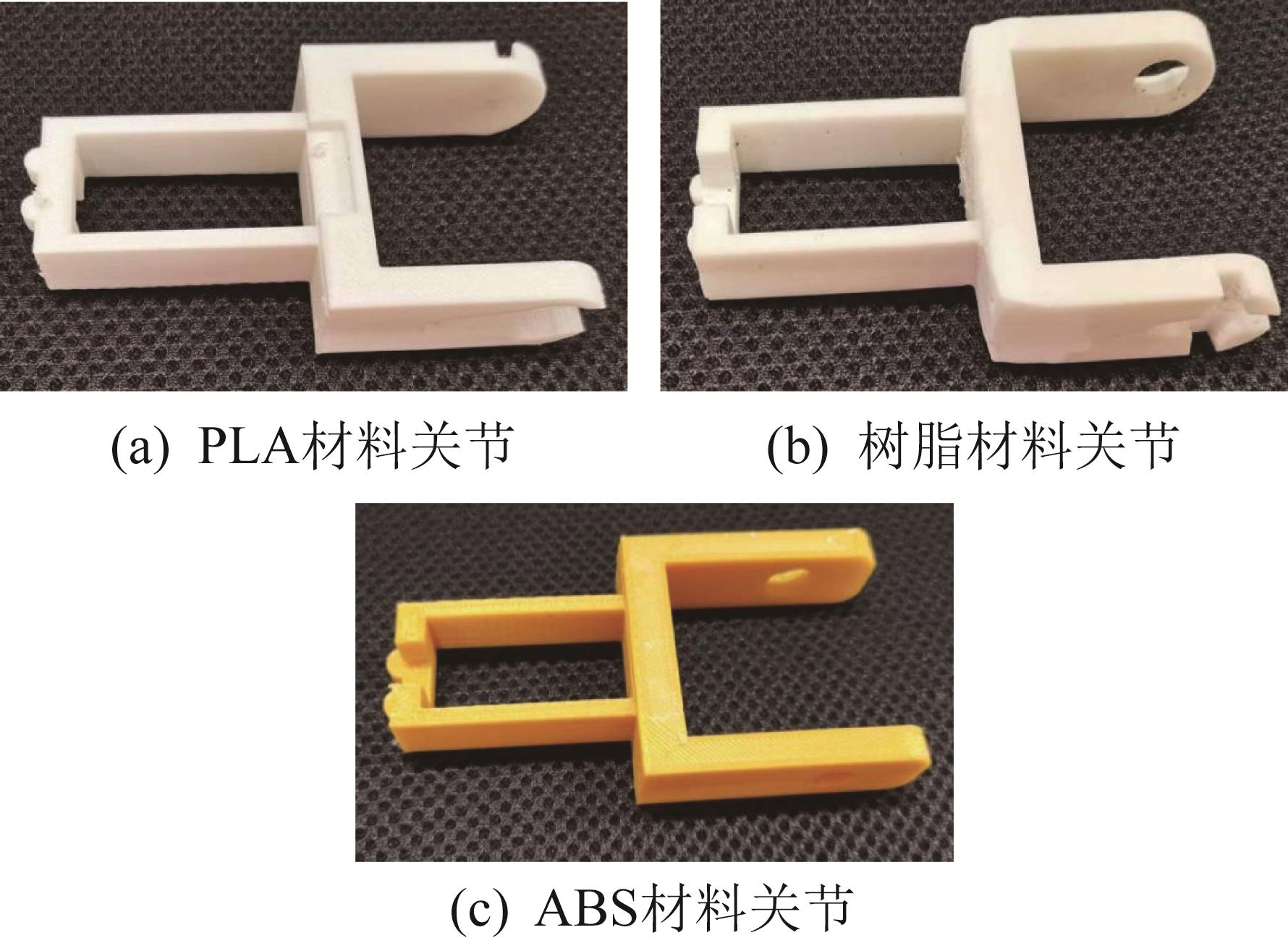
Fig.6 Snakelike robot joints made of different materials
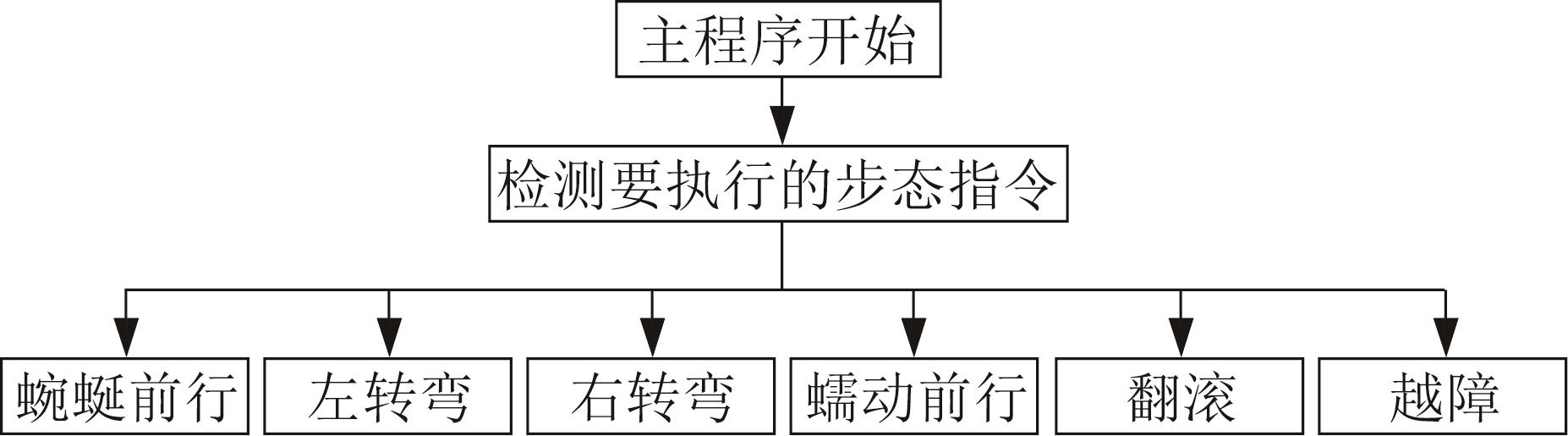
Fig.7 Flow of motion control for snakelike robot
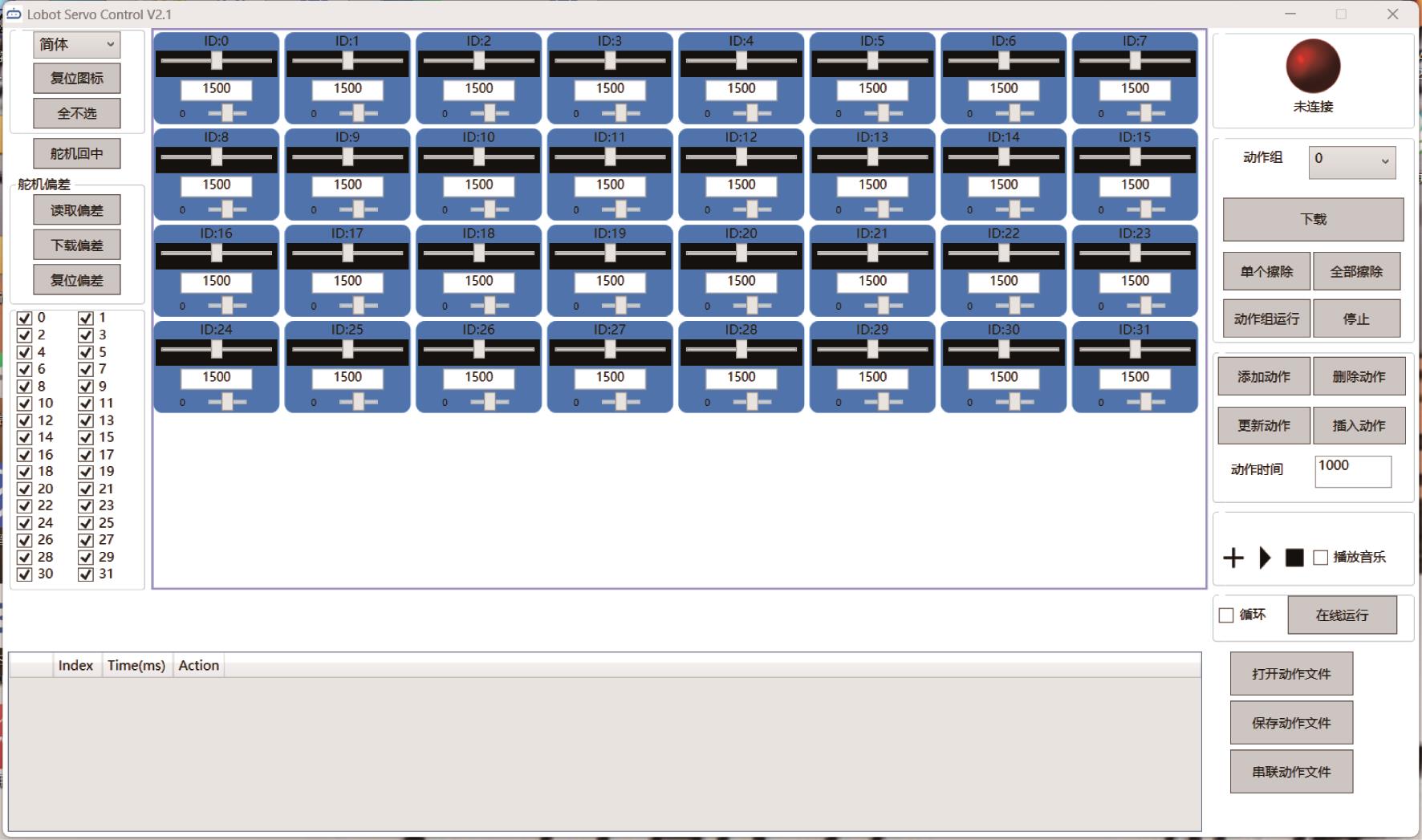
Fig.8 Lobot Servo Control software interface
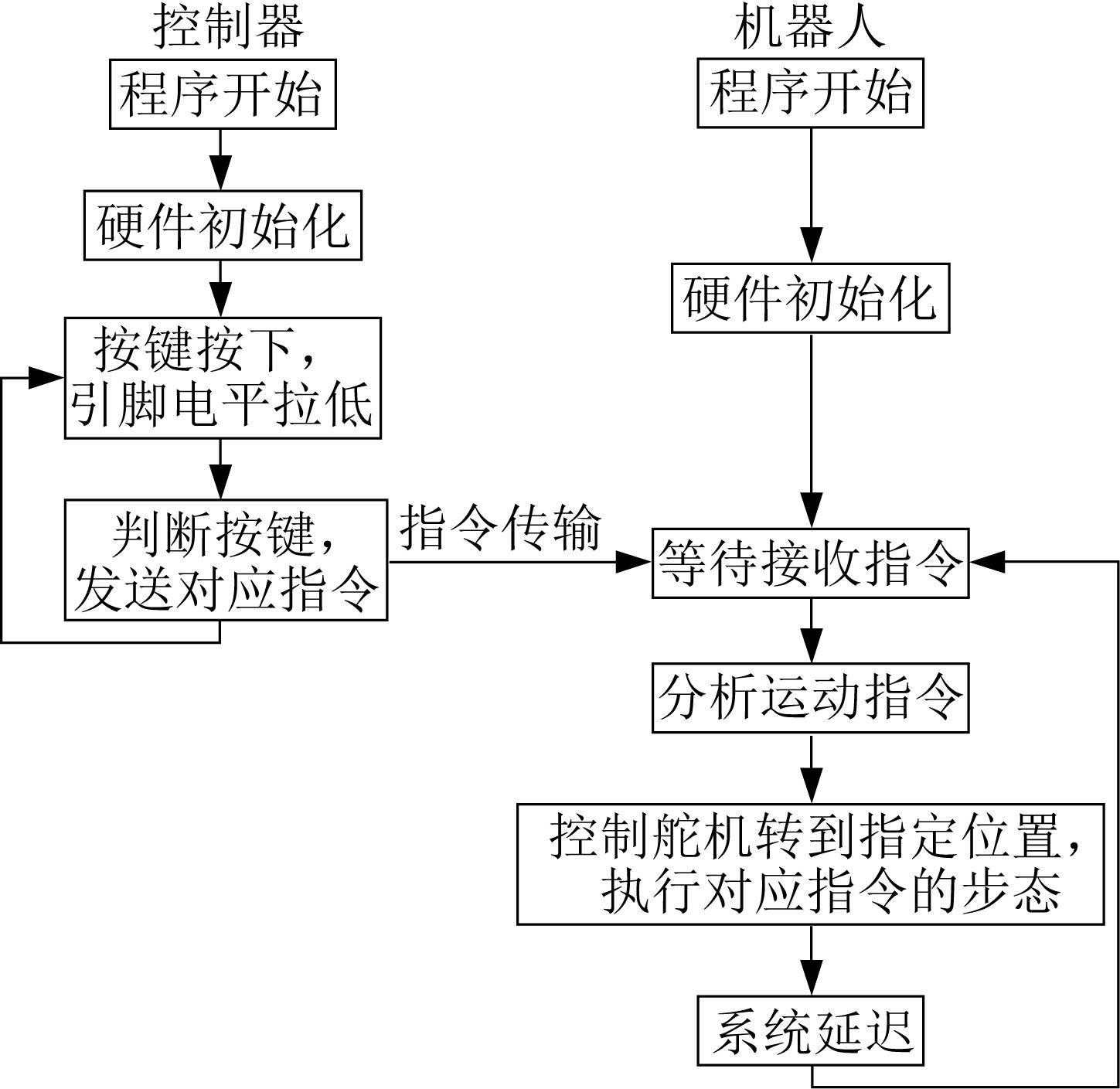
Fig.9 Remote control process of snakelike robot
Fig.10 Snakelike robot prototype
参数
量值
关节数量
11个
关节外壳直径
95 mm
总长度
1 122 mm
总质量
2 055 g
Table 1Related technical parameters of snakelike robot prototype
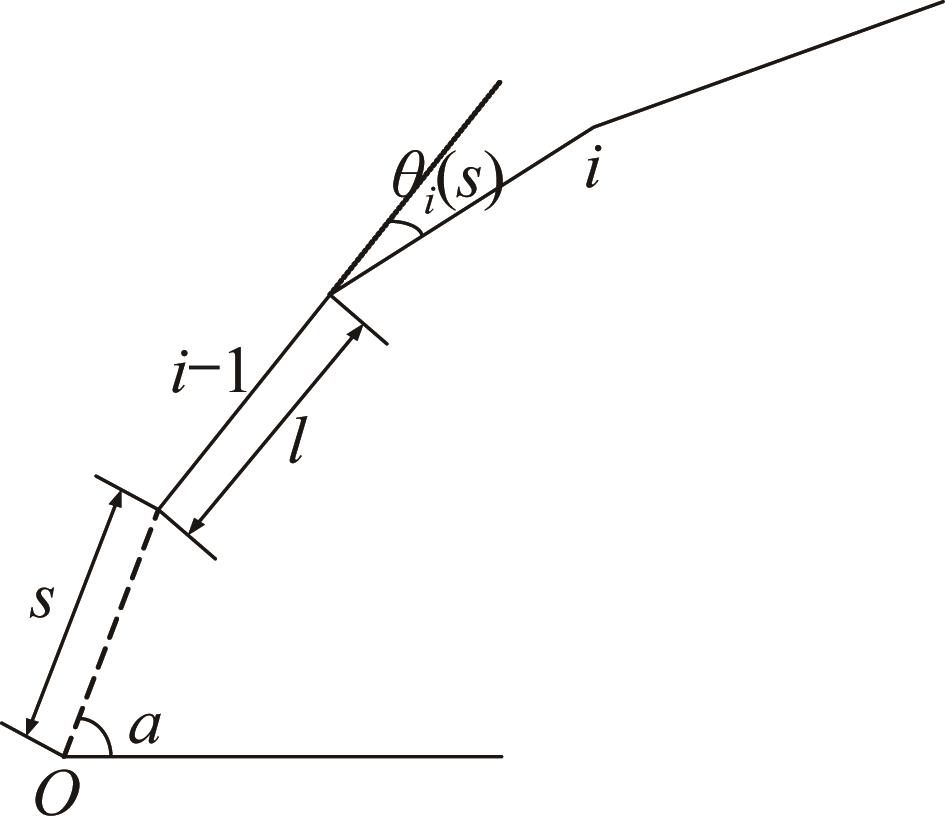
Fig.11 Fitting diagram of simplified Serpeniod curve
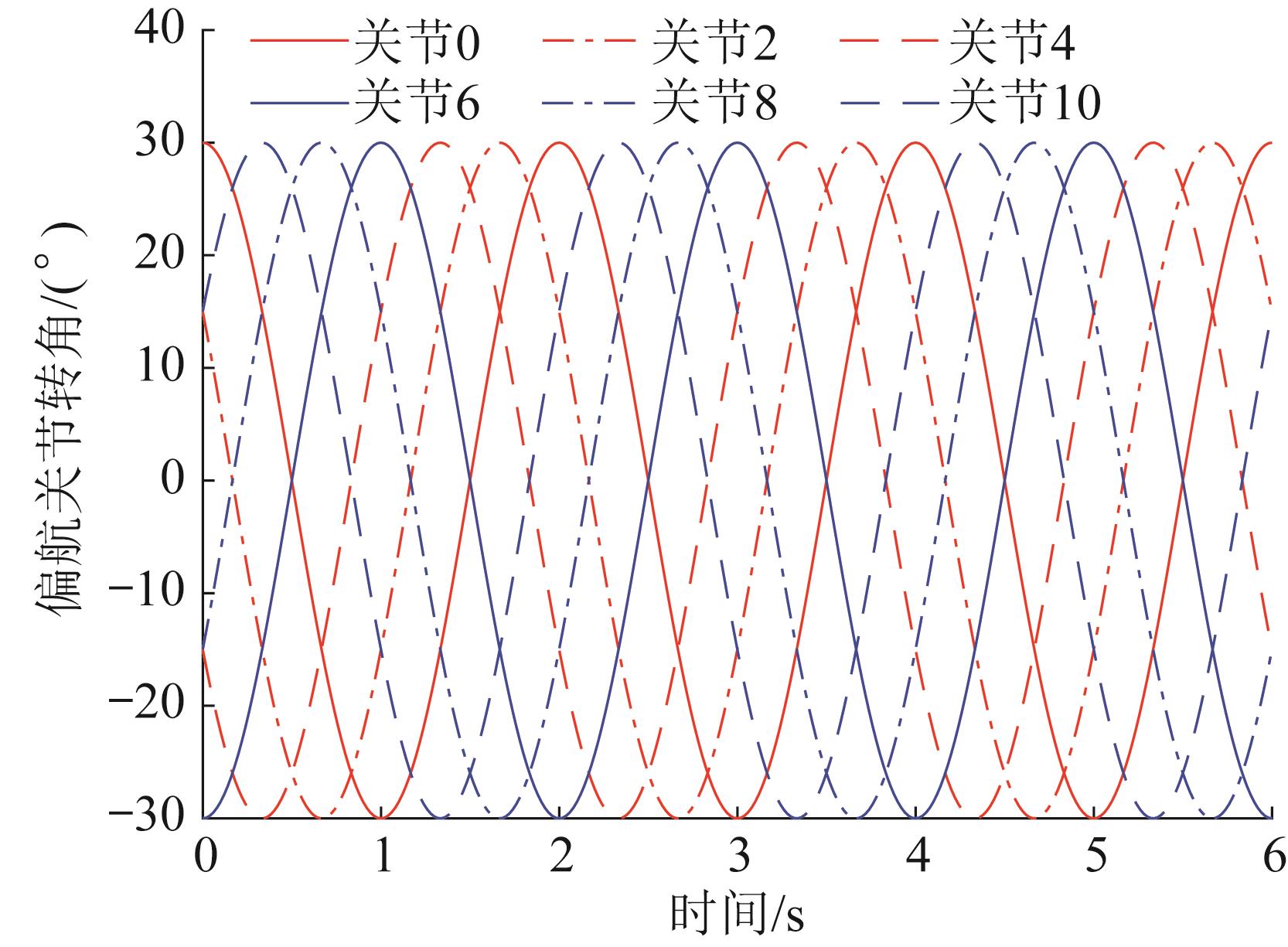
Fig.12 Variation curves of yaw joint angle of snakelike robot during meandering locomotion
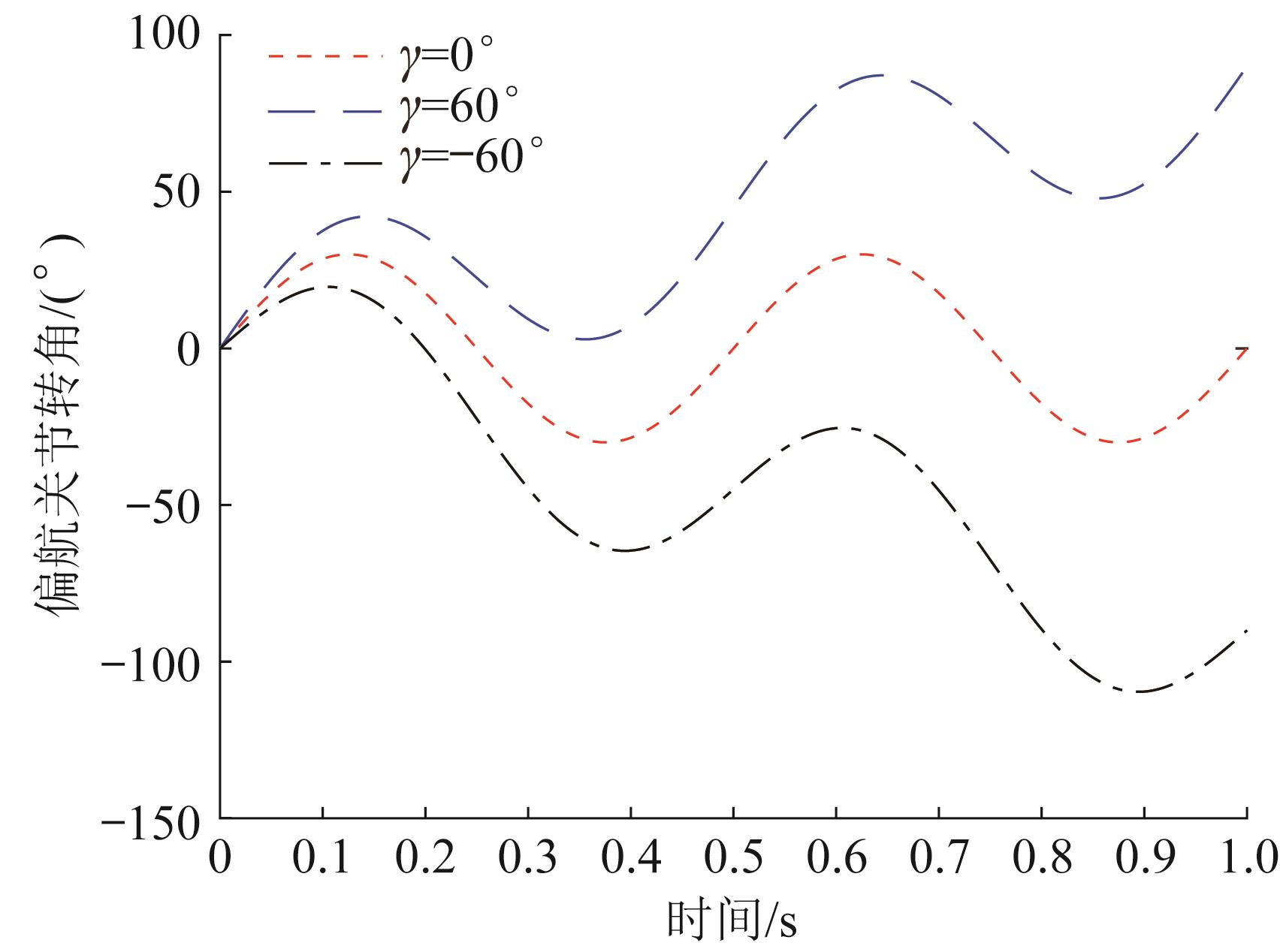
Fig.13 Variation curves of yaw joint angle of snakelike robot with different horizontal angles
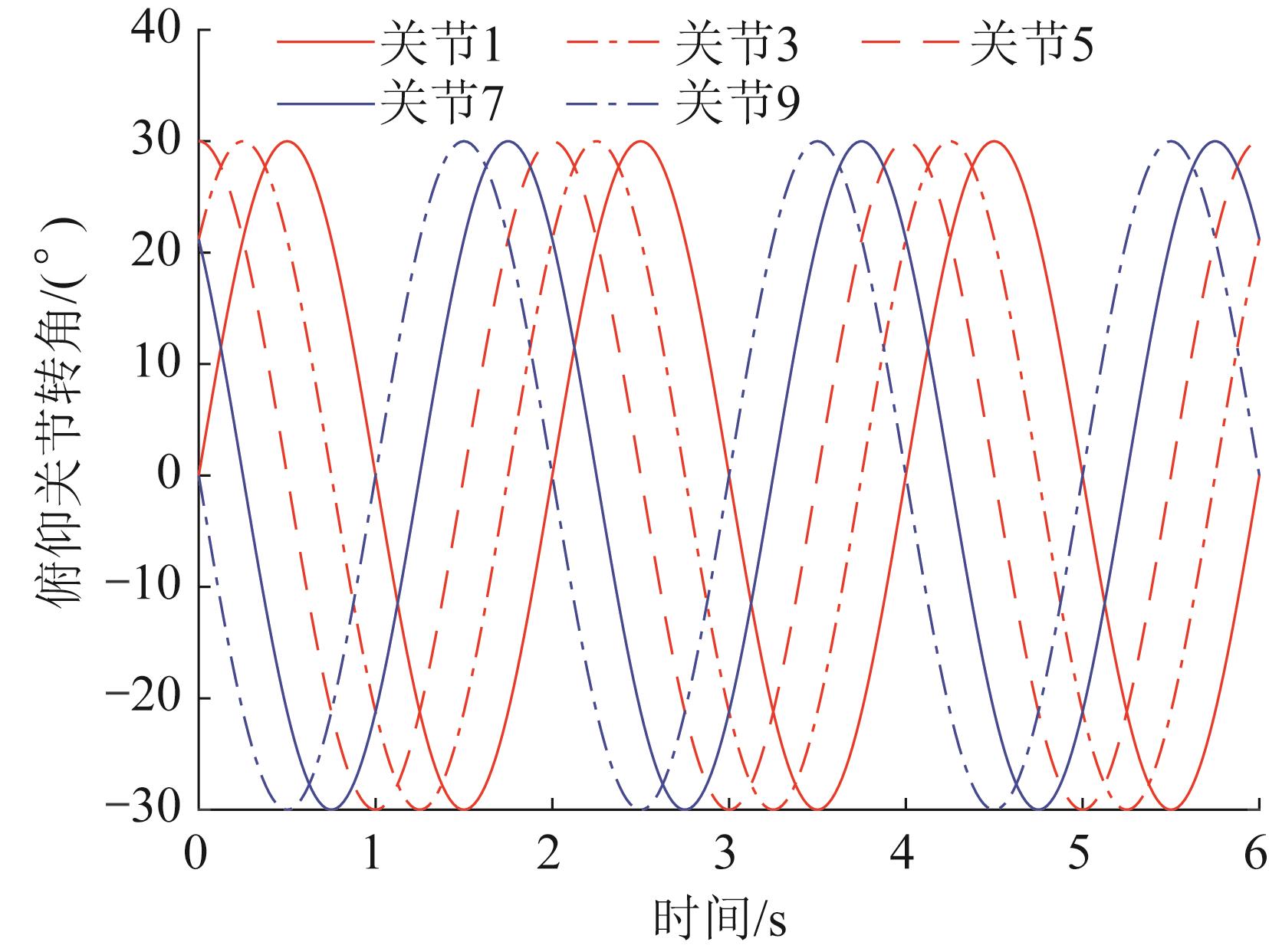
Fig.14 Variation curves of pitch joint angle of snakelike robot during wriggling locomotion
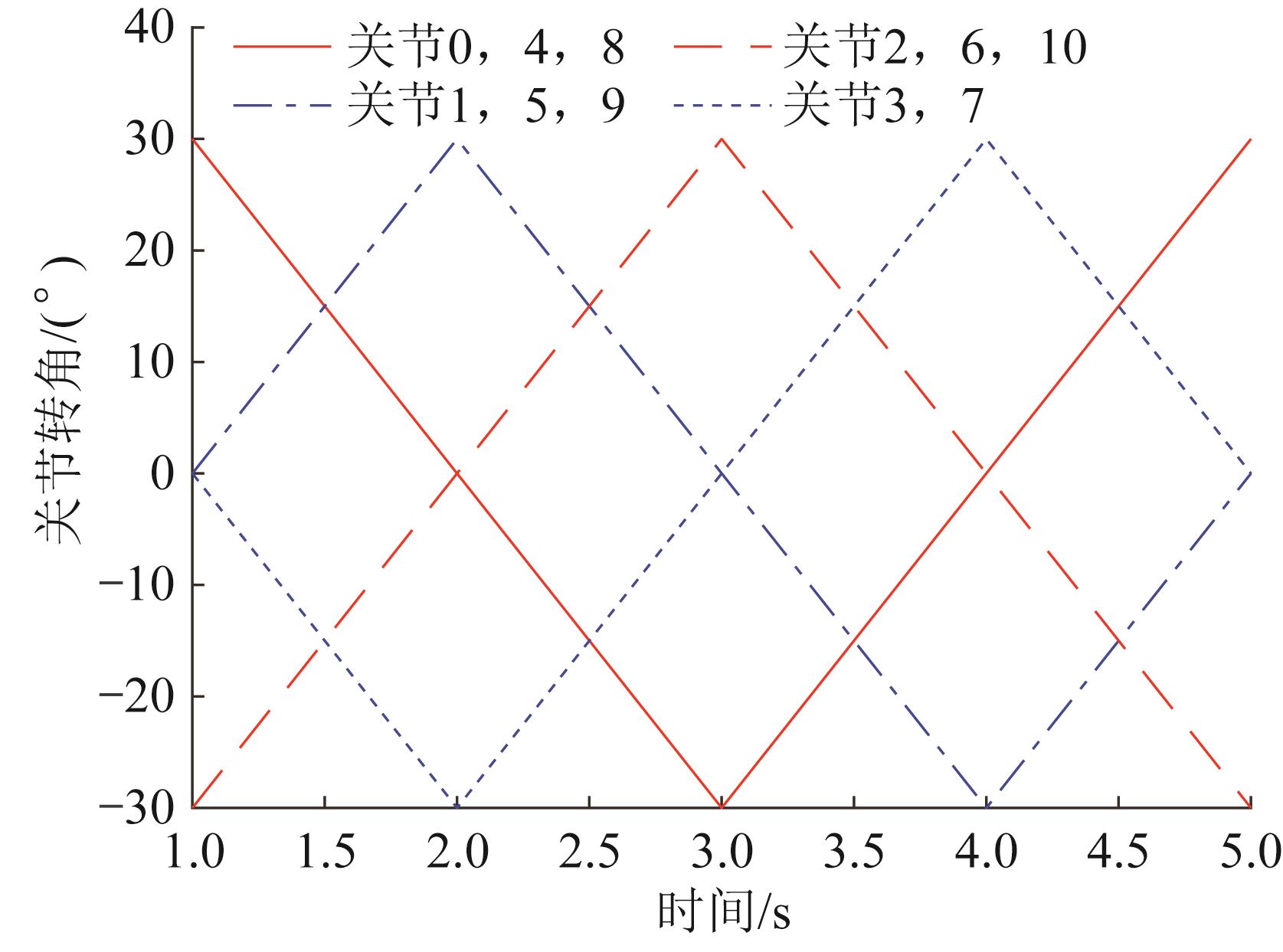
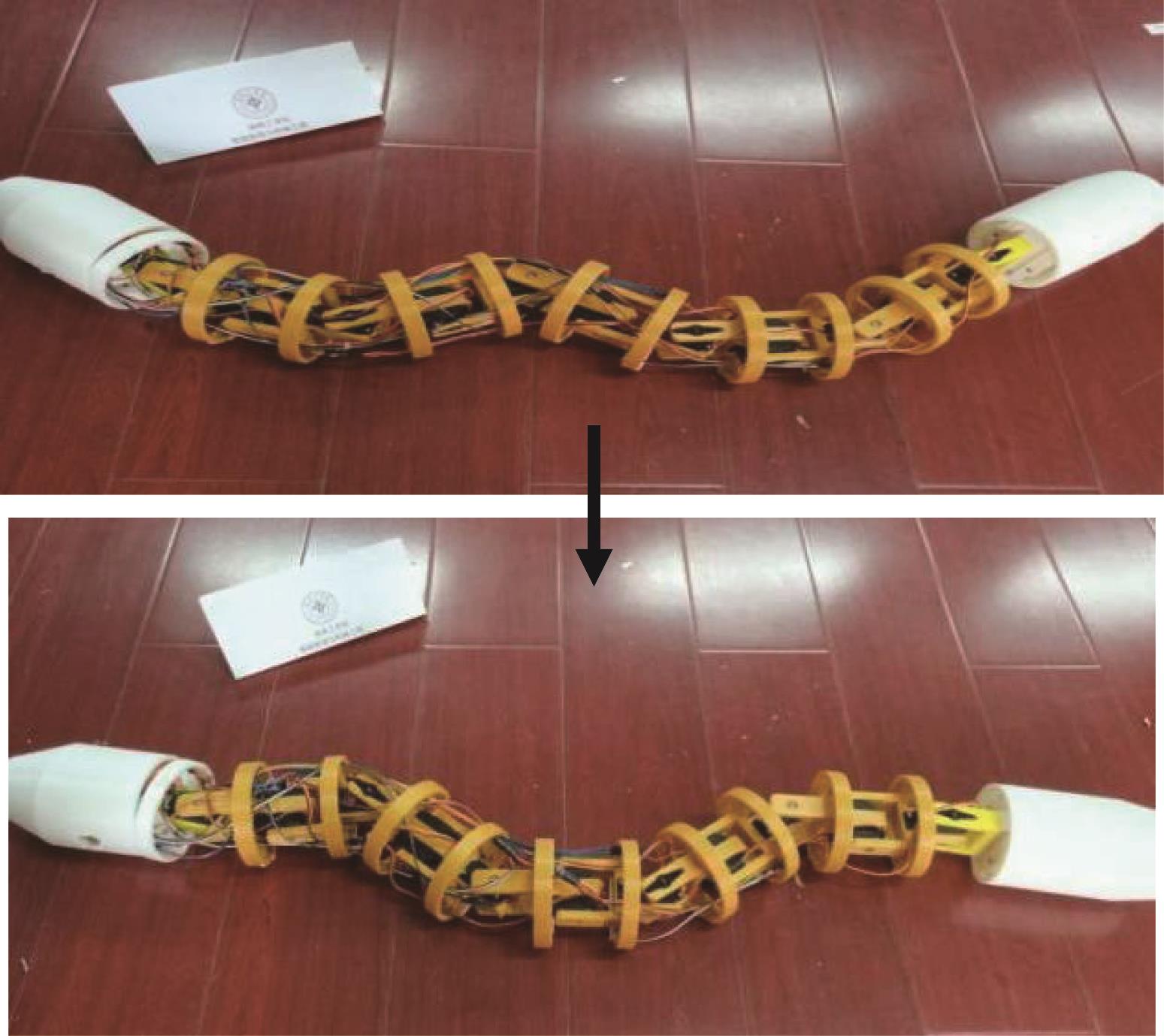
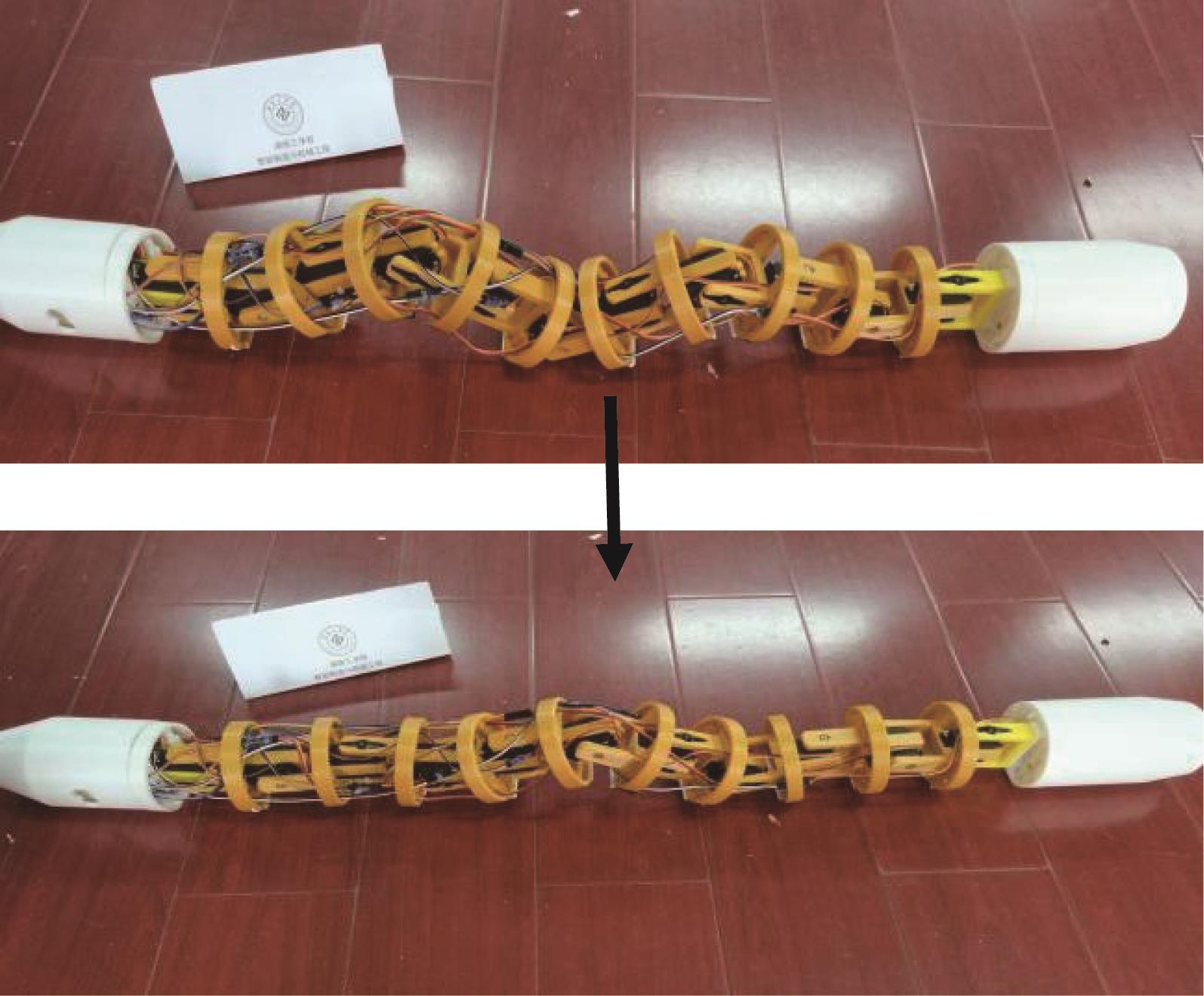
Fig.15 Variation curves of joint angle of snakelike robot during tumbling locomotion
Fig.16 Variation curves of pitch joint angle of snakelike robot during obstacle surmounting locomotion
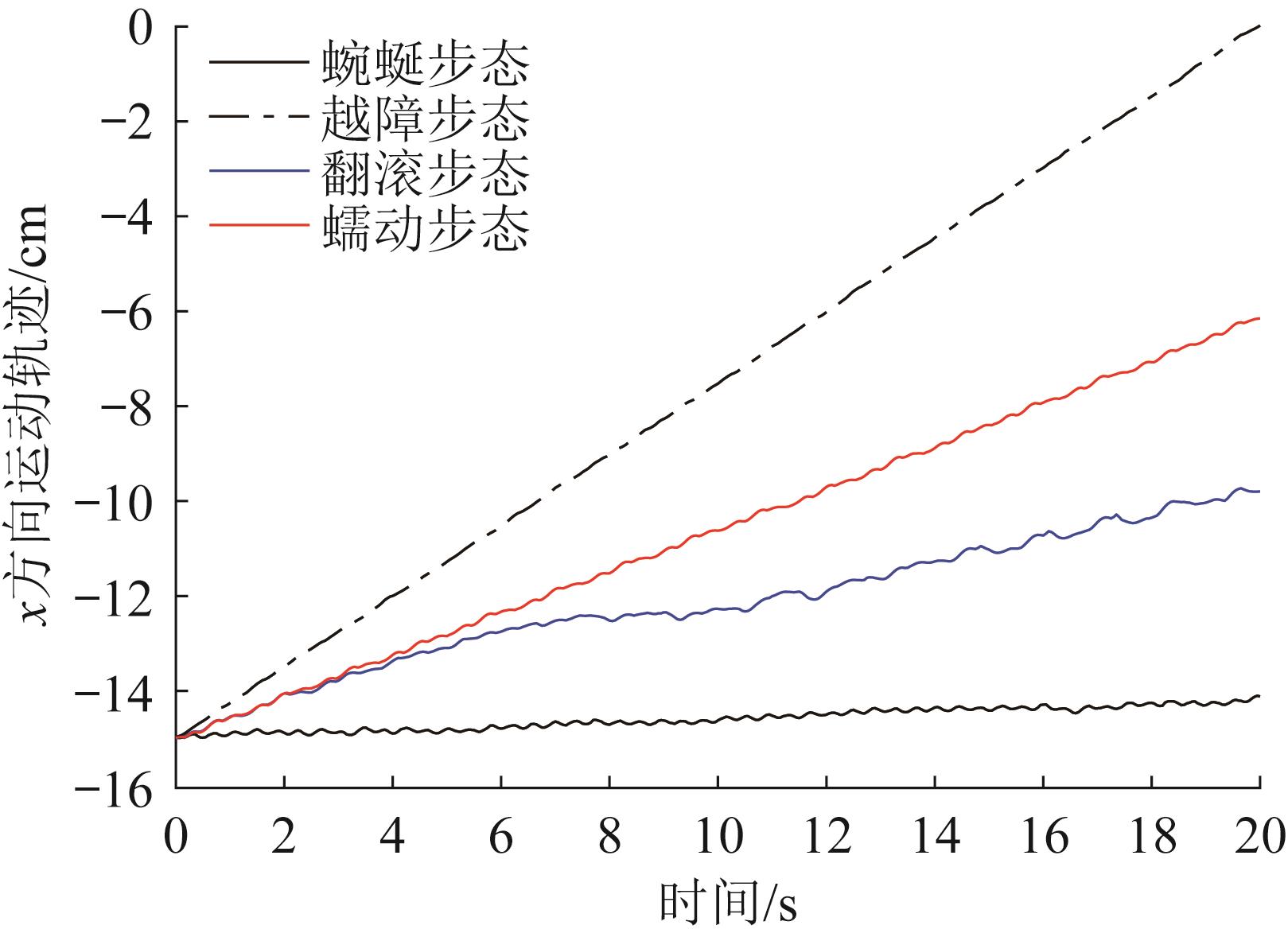
Fig.17 Motion trajectories of centroid of snakelike robot under different gaits
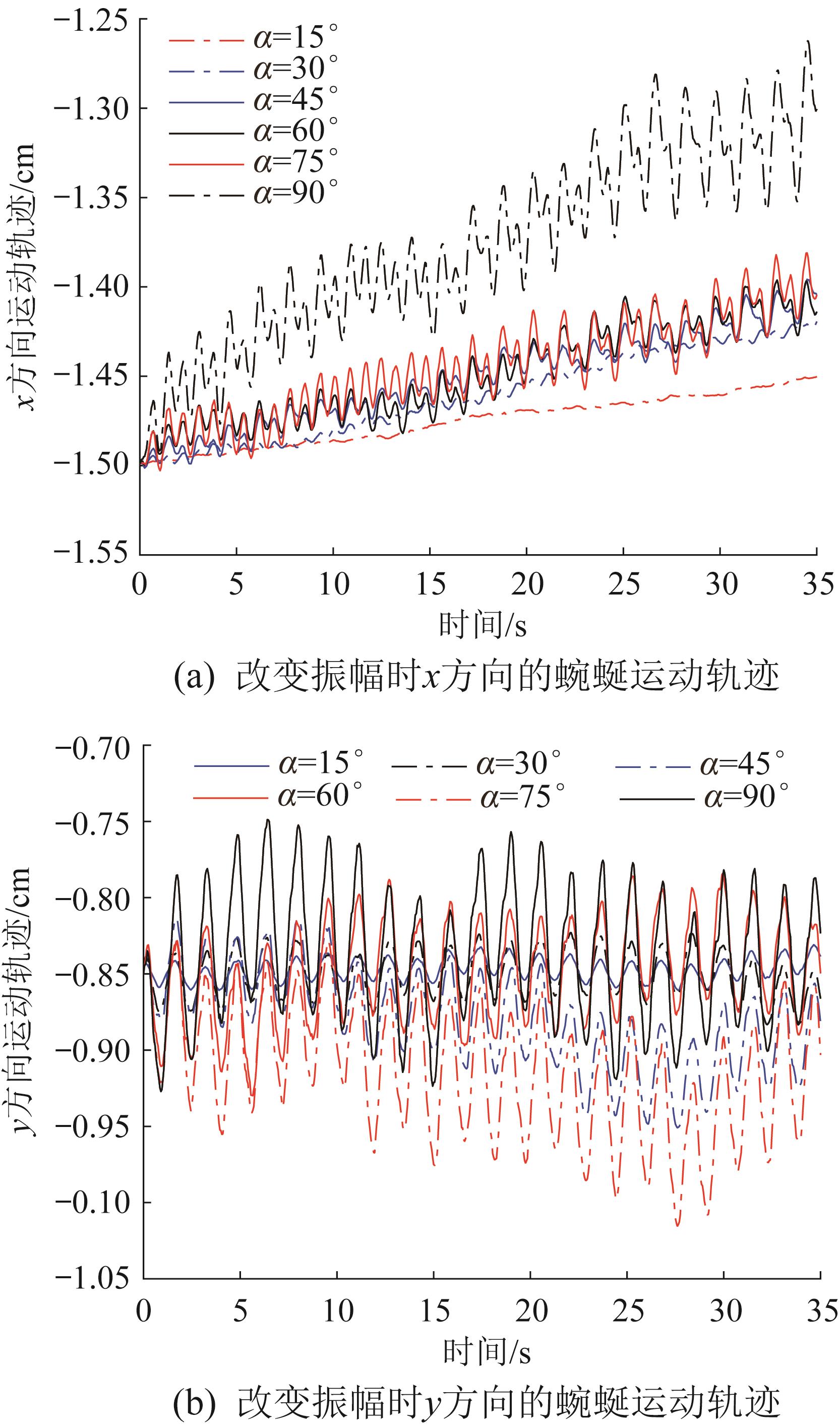
Fig.18 Meandering locomotion trajectories of snakelike robot under different amplitudes
Fig.19 Meandering locomotion trajectories of snakelike robot under different periods
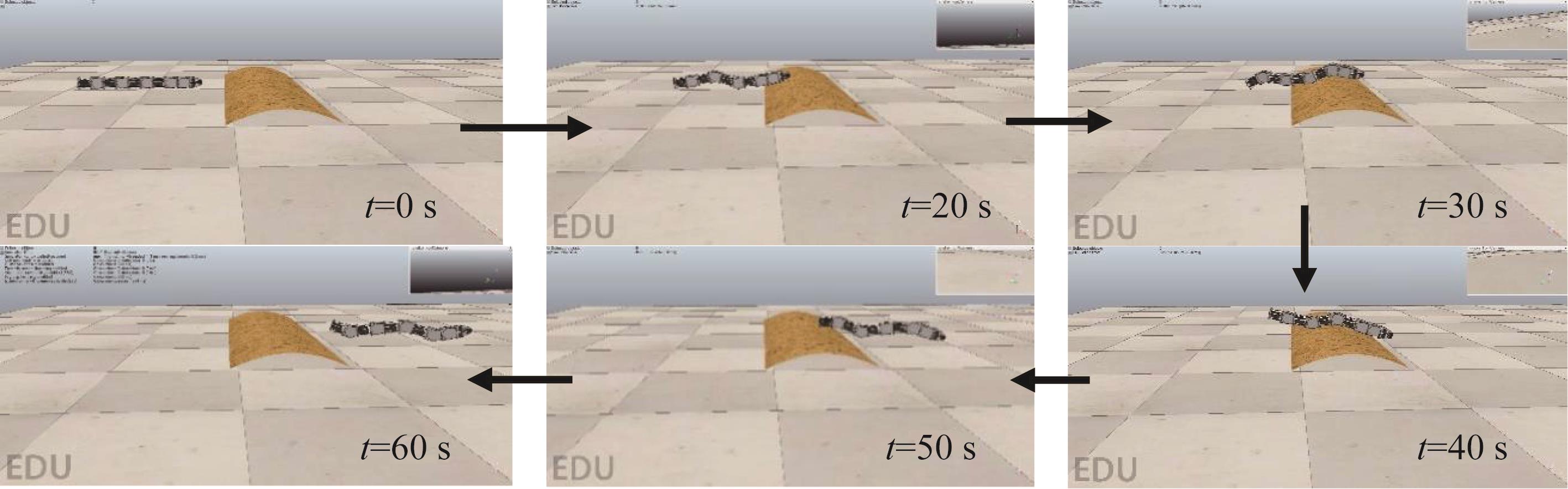
Fig.20 Simulation result of obstacle surmounting process of snakelike robot
时间
t/s
关节0
关节2
关节4
关节6
关节8
关节10
1
-30
-15
15
30
15
-15
2
30
15
-15
-30
-15
15
Table 2Setting of yaw joint angle of snakelike robot in meandering locomotion
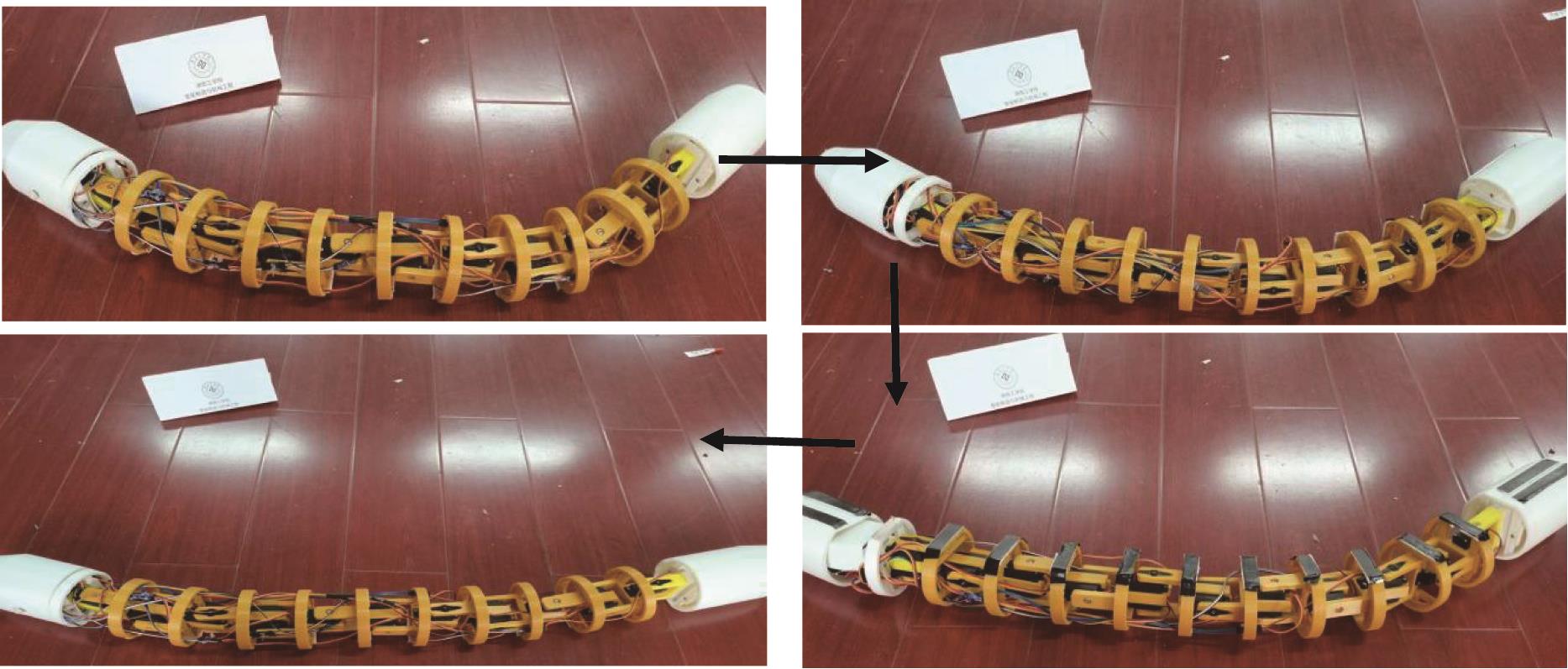
Fig.21 Experimental site of snakelike robot in meandering locomotion
时间t/s
关节1
关节3
关节5
关节7
关节9
1
0
-15
-30
15
0
2
0
15
30
-15
0
Table 3Setting of pitch joint angle of snakelike robot in wriggling locomotion
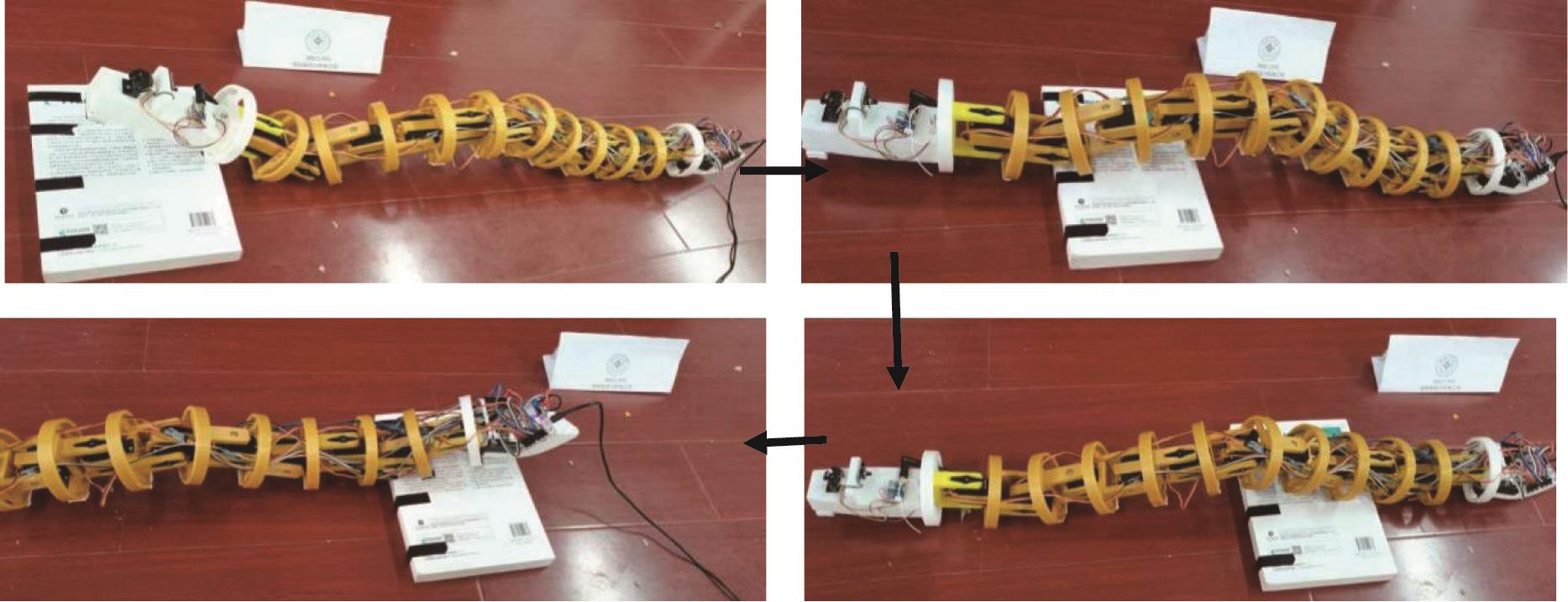
Fig.22 Experimental site of snakelike robot in wriggling locomotion
时间t/s
关节0
关节1
关节2
关节3
关节4
关节5
1
30
0
-30
0
30
0
2
0
30
0
-30
0
30
3
-30
0
30
0
-30
0
4
0
-30
0
30
0
-30
5
30
0
-30
0
30
0
时间t/s
关节6
关节7
关节8
关节9
关节10
1
-30
0
30
0
-30
2
0
-30
0
30
0
3
30
0
-30
0
30
4
0
30
0
-30
0
5
-30
0
30
0
30
Table 4Setting of joint angles for snakelike robot in tumbling locomotion
Fig.23 Experimental site of snakelike robot in tumbling locomotion
越障种类
时间t/s
关节1
关节3
关节5
关节7
关节9
头部越障
1
-36
-27
36
-36
-36
2
-36
0
27
-22.5
-36
3
-36
0
0
0
0
身体越障
1
22.5
-27
36
-36
-36
2
-9
-27
27
27
0
3
22.5
0
0
0
0
尾部越障
1
0
36
8
-27
27
2
-31.5
7
31.5
22.5
27
3
0
0
0
0
27
Table 5Setting of pitch joint angle of snakelike robot in obstacle surmounting locomotion
Fig.24 Experiment site of snakelike robot in obstacle surmounting locomotion
[1]
苏中,张双彪,李兴城.蛇形机器人的研究与发展综述[J].中国机械工程,2015,26(3):414-425. doi:10.3969/j.issn.1004-132X.2015.03.022 SU Z, ZHANG S B, LI X C. Present situation and development tendency of snake-like robots[J]. China Mechanical Engineering, 2015, 26(3): 414-425.
doi: 10.3969/j.issn.1004-132X.2015.03.022
[2]
LILJEBÄCK P, PETTERSEN K Y, STAVDAHL Ø, et al. A review on modelling, implementation, and control of snake robots[J]. Robotics and Autonomous Systems, 2012, 60(1): 29-40.
[3]
LIU J D, TONG Y C, LIU J G. Review of snake robots in constrained environments[J]. Robotics and Autonomous Systems, 2021, 141: 103785.
[4]
张军豪,陈英龙,杨双喜,等.蛇形机器人:仿生机理,结构驱动和建模控制[J].机械工程学报,2022,58(7):75-92. doi:10.3901/jme.2022.07.075 ZHANG J H, CHEN Y L, YANG S X, et al. Snake robotics: bionic mechanism, structure, actuation, modeling and control[J]. Journal of Mechanical Engineering, 2022, 58(7): 75-92.
doi: 10.3901/jme.2022.07.075
[5]
张东.复杂环境下仿蛇机器人三维运动建模与优化控制[D].北京:北京化工大学,2020:1-16. ZHANG D. Modeling and optimize control of 3-D gaits for snakelike robots in complexity environments[D]. Beijing: Beijing University of Chemical Technology, 2020: 1-16.
[6]
刘旭鹏,郜志英,臧勇,等.蛇形机器人蜿蜒运动的摩擦机理及推进条件[J].机械工程学报,2021,57(21):189-201. doi:10.3901/jme.2021.21.189 LIU X P, GAO Z Y, ZANG Y, et al. Tribological mechanism and propulsion conditions for creeping locomotion of the snake-like robot[J]. Journal of Mechanical Engineering, 2021, 57(21): 189-201.
doi: 10.3901/jme.2021.21.189
[7]
周云虎.轻型蛇形机器人系统设计及分段运动规划策略研究[D].哈尔滨:哈尔滨工业大学,2021:10-12. ZHOU Y H. Lightweight snake robot system design and segmentd motion planning strategy research[D]. Harbin: Harbin Institute of Technology, 2021: 10-12.
[8]
LILJEBÄCK P, STAVDAHL Ø, BEITNES A. SnakeFighter: development of a water hydraulic fire fighting snake robot[C]//2006 9th International Conference on Control, Automation, Robotics and Vision, Singapore, Dec. 5-8, 2006.
[9]
OHNO H, HIROSE S. Pneumatically-driven active cord mechanism “Slim Slime Robot”[J]. Journal of Robotics and Mechatronics, 2014, 26(1): 105-106.
[10]
ENNER F, ROLLINSON D, CHOSET H. Simplified motion modeling for snake robots[C]//2012 IEEE International Conference on Robotics and Automation, Saint Paul, MN, May 14-18, 2012.
[11]
张丹凤,李斌,王立岩.基于连续体模型的蛇形机器人质心速度跟踪控制方法[J].机器人,2017,39(6):829-837. doi:10.13973/j.cnki.robot.2017.0829 ZHANG D F, LI B, WANG L Y. Tracking control method of the centre-of-mass velocity for a snake-like robot based on the continuum model[J]. Robot, 2017, 39(6): 829-837.
doi: 10.13973/j.cnki.robot.2017.0829
[12]
郁树梅,马书根,李斌,等.蛇形机器人步态产生及步态分析[J].机器人,2011,33(3):371-378. doi:10.3724/sp.j.1218.2011.00371 YU S M, MA S G, LI B, et al. Gait generation and analysis for snake-like robots[J]. Robot, 2011, 33(3): 371-378.
doi: 10.3724/sp.j.1218.2011.00371
[13]
YAN B Z, SHI D X, WEI J, et al. HiBot: a generic ROS-based robot-remote-control framework[C]//2017 2nd Asia-Pacific Conference on Intelligent Robot Systems (ACIRS), Wuhan, Jun. 16-18, 2017.
[14]
HIROSE S. Biologically inspired robots: snake-like locomotors and manipulators[M]. London: Oxford University Press, 1993: 1-49.
[15]
MA S. Analysis of snake movement forms for realization of snake-like robots[C]//1999 IEEE International Conference on Robotics and Automation, Detroit, MI, May 10-15, 1999.
[16]
MARVI H, HU D L. Friction enhancement in concertina locomotion of snakes[J]. Journal of the Royal Society Interface, 2012, 9(76): 3067-3080.
[17]
MARVI H, BRIDGES J, HU D L. Snakes mimic earthworms: propulsion using rectilinear travelling waves[J]. Journal of the Royal Society Interface, 2013, 10(84): 20130188.
[18]
MARVI H, GONG C, GRAVISH N, et al. Sidewinding with minimal slip: snake and robot ascent of sandy slopes[J]. Science, 2014, 346(6206): 224-229.
[19]
YE C L, MA S G, LI B, et al. Turning and side motion of snake-like robot[C]//IEEE International Conference on Robotics and Automation, New Orleans, LA, Apr. 26-May 1, 2004.
[20]
HATTON R L, CHOSET H. Generating gaits for snake robots: annealed chain fitting and key frame wave extraction[J]. Autonomous Robots, 2009, 28(3): 271-281.
[21]
CAO Z C, ZHANG D, ZHOU M C. Modeling and control of hybrid 3-D gaits of snake-like robots[J]. IEEE Transactions on Neural Networks and Learning Systems, 2021, 32(10): 4603-4612.