| Innovative Design |
|


|
|
|
| Design and experimental research of pneumatic soft picking manipulator |
San-ping LI1( ),Teng-jia SUN1,Long-qiang YUAN1,Li-guo WU1,2() ),Teng-jia SUN1,Long-qiang YUAN1,Li-guo WU1,2() |
1.School of Mechanical and Electrical Engineering, Northeast Forestry University, Harbin 150040, China
2.Harbin Forestry Machinery Research Institute, State Forestry and Grassland Administration, Harbin 150086, China |
|
|
|
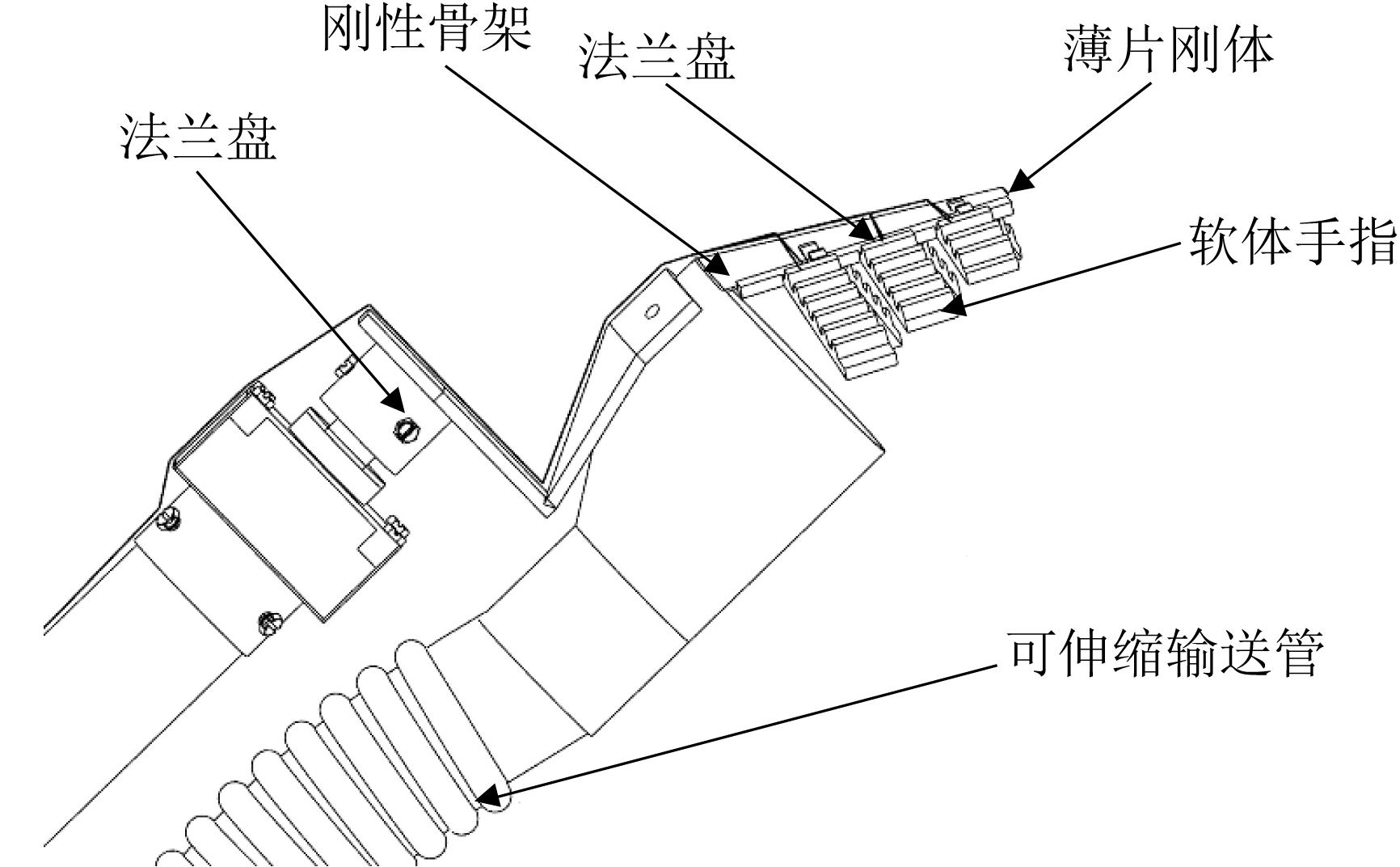
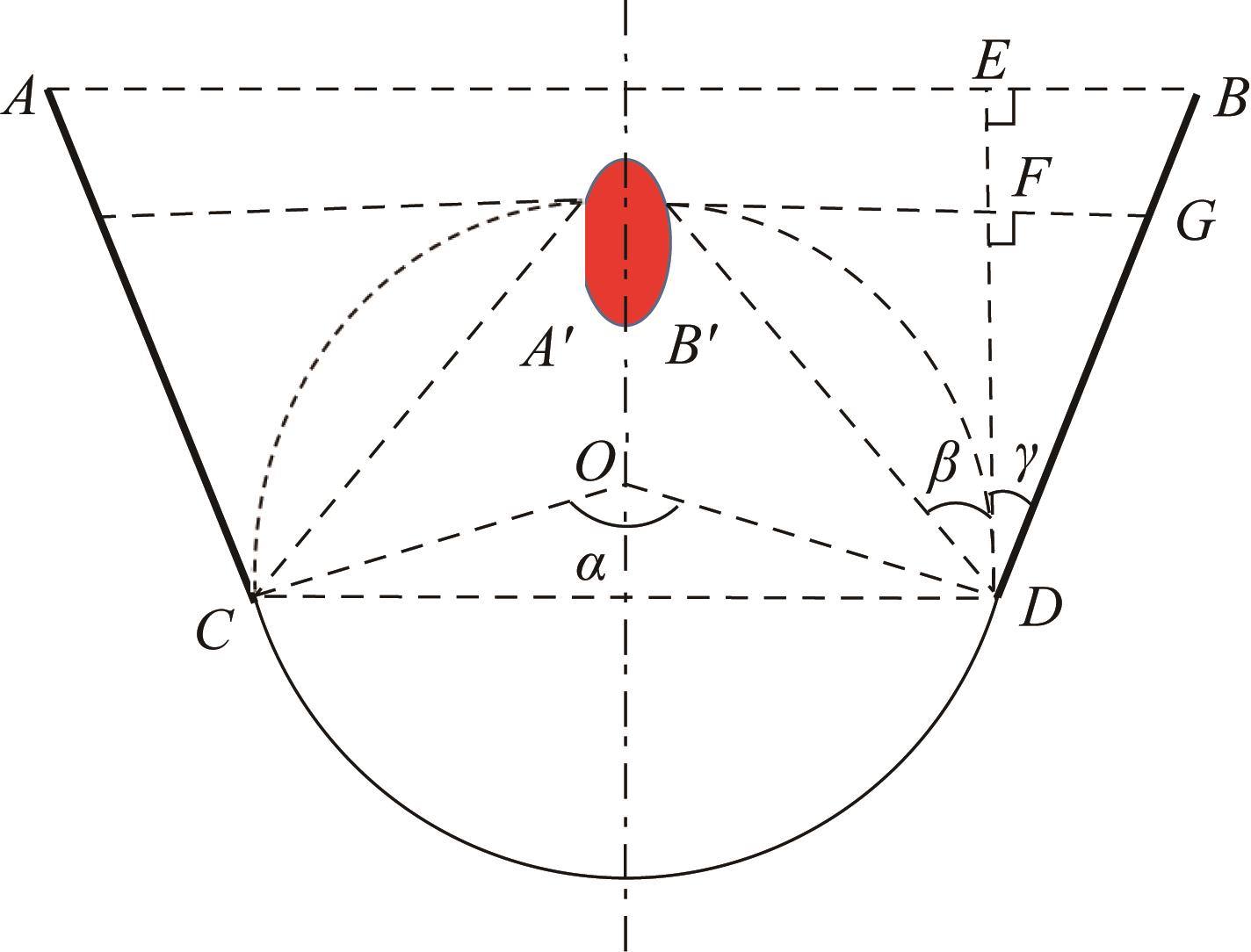
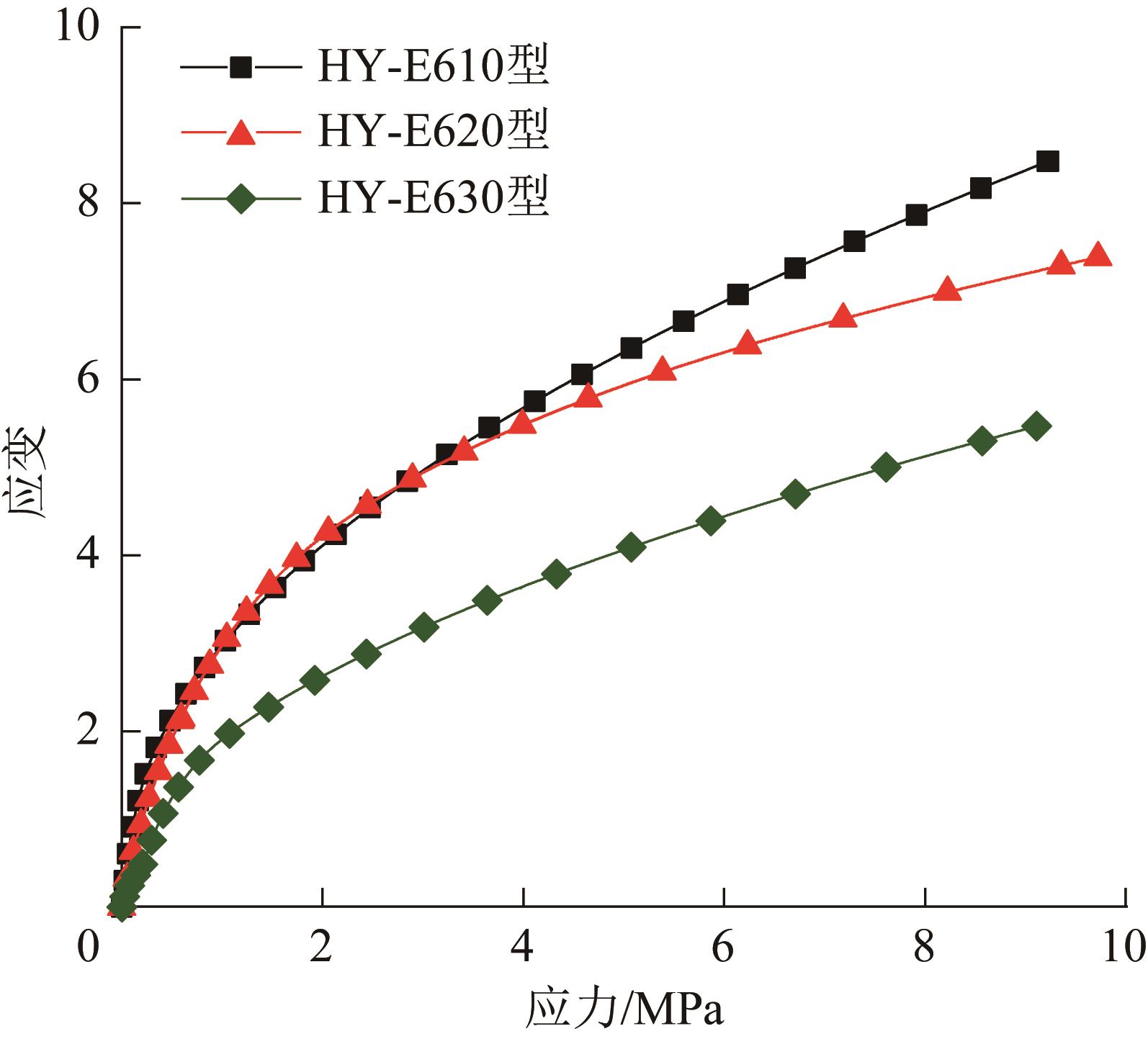
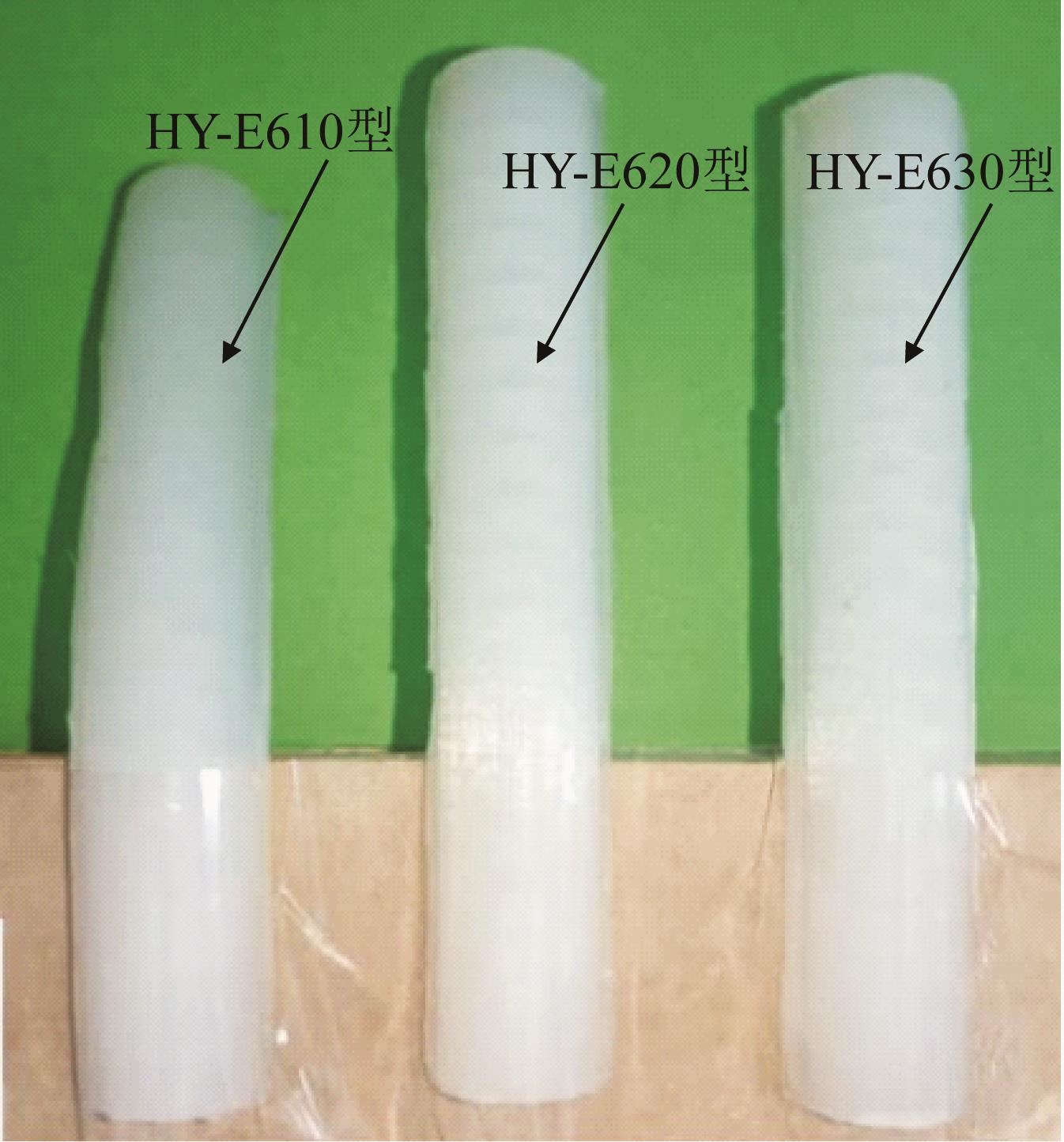
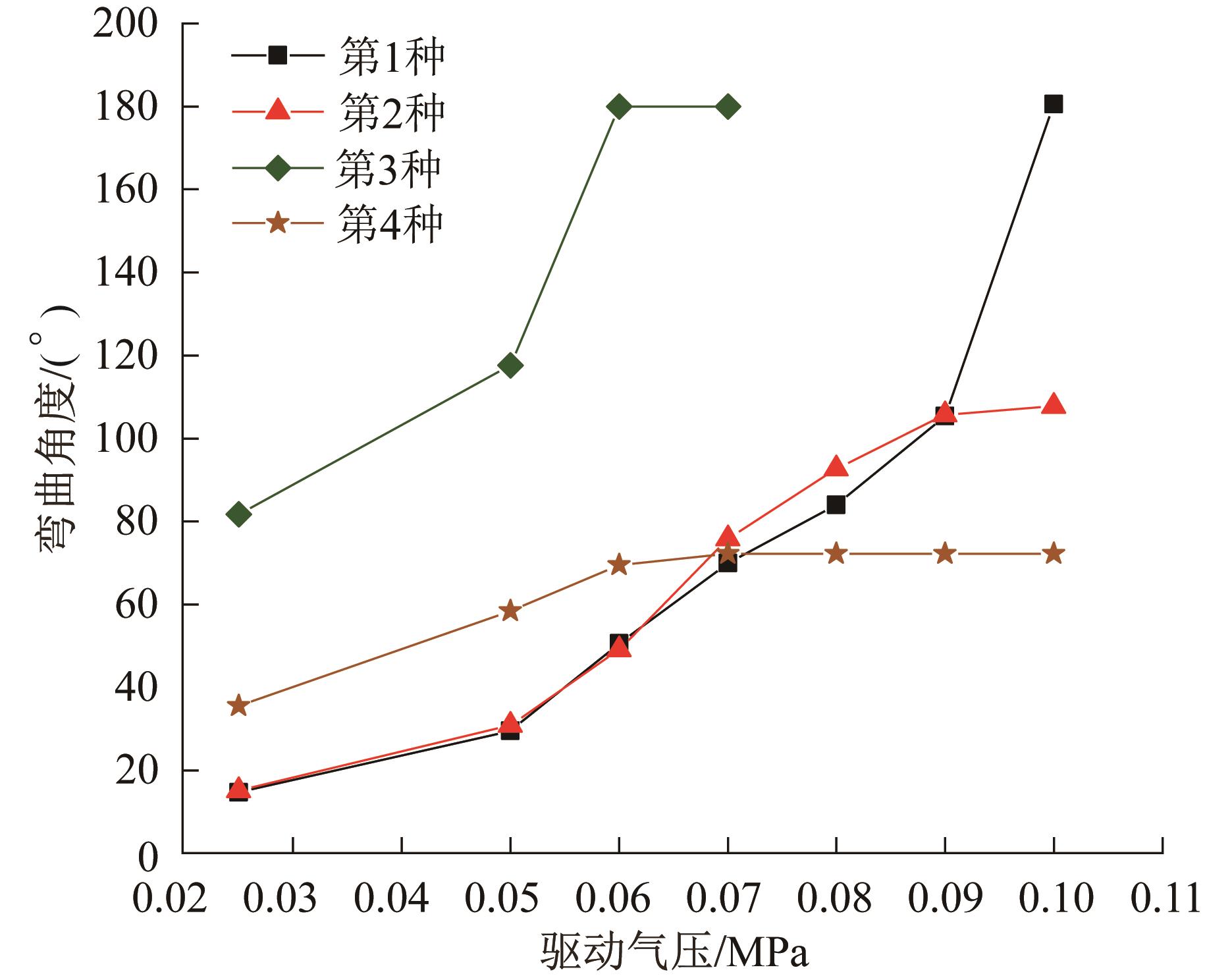
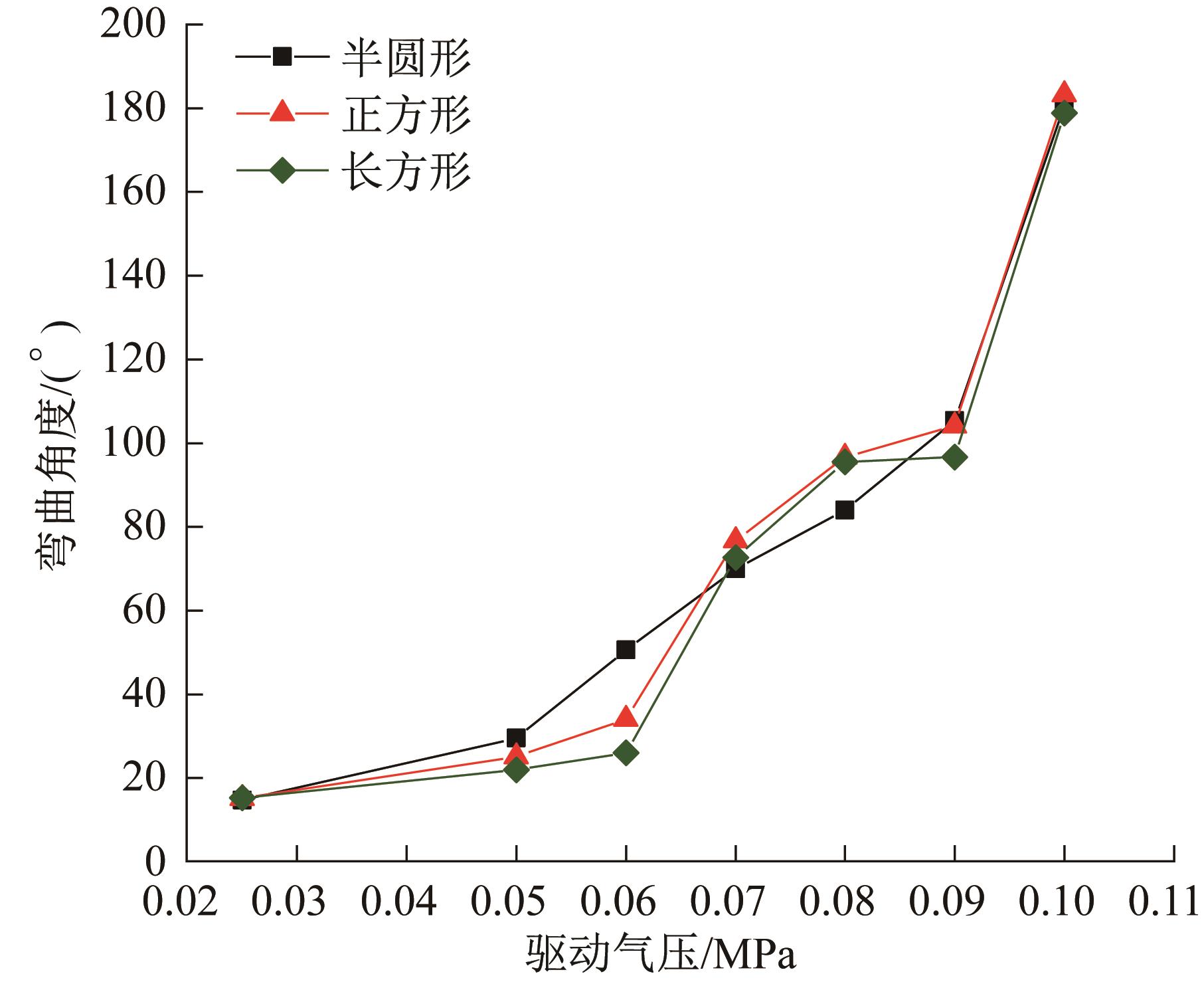
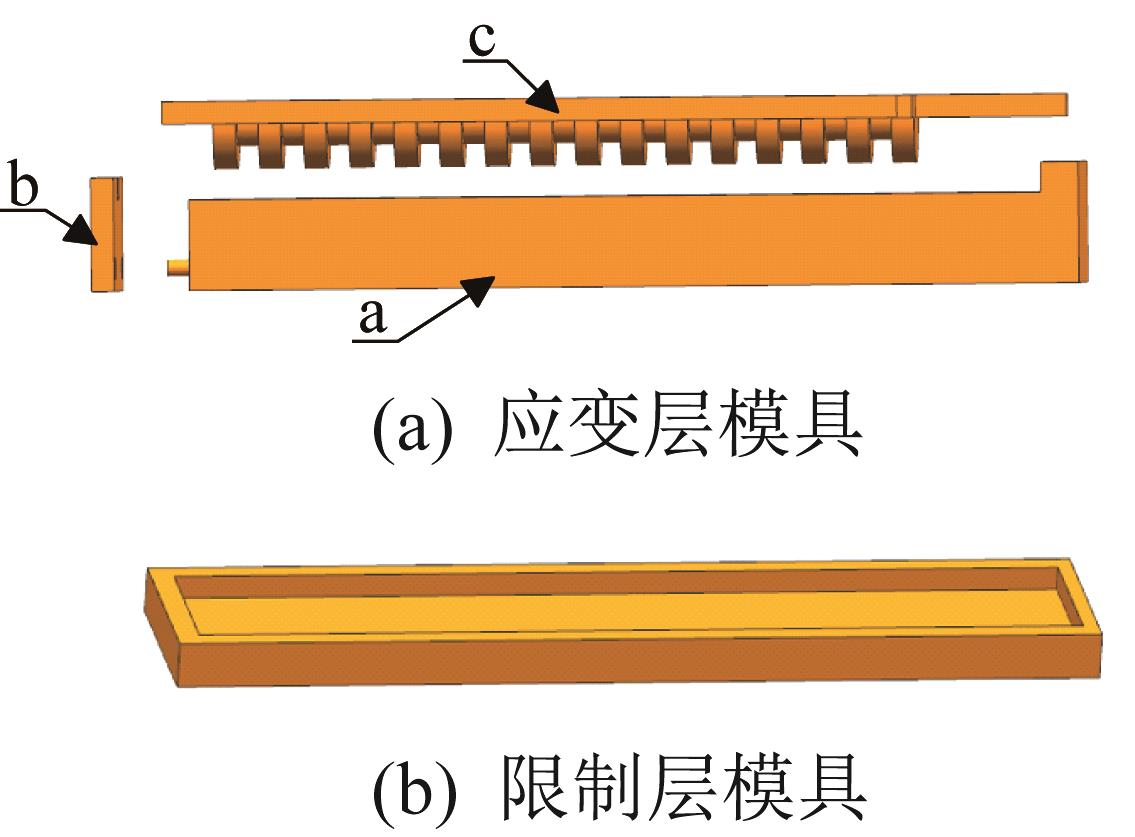
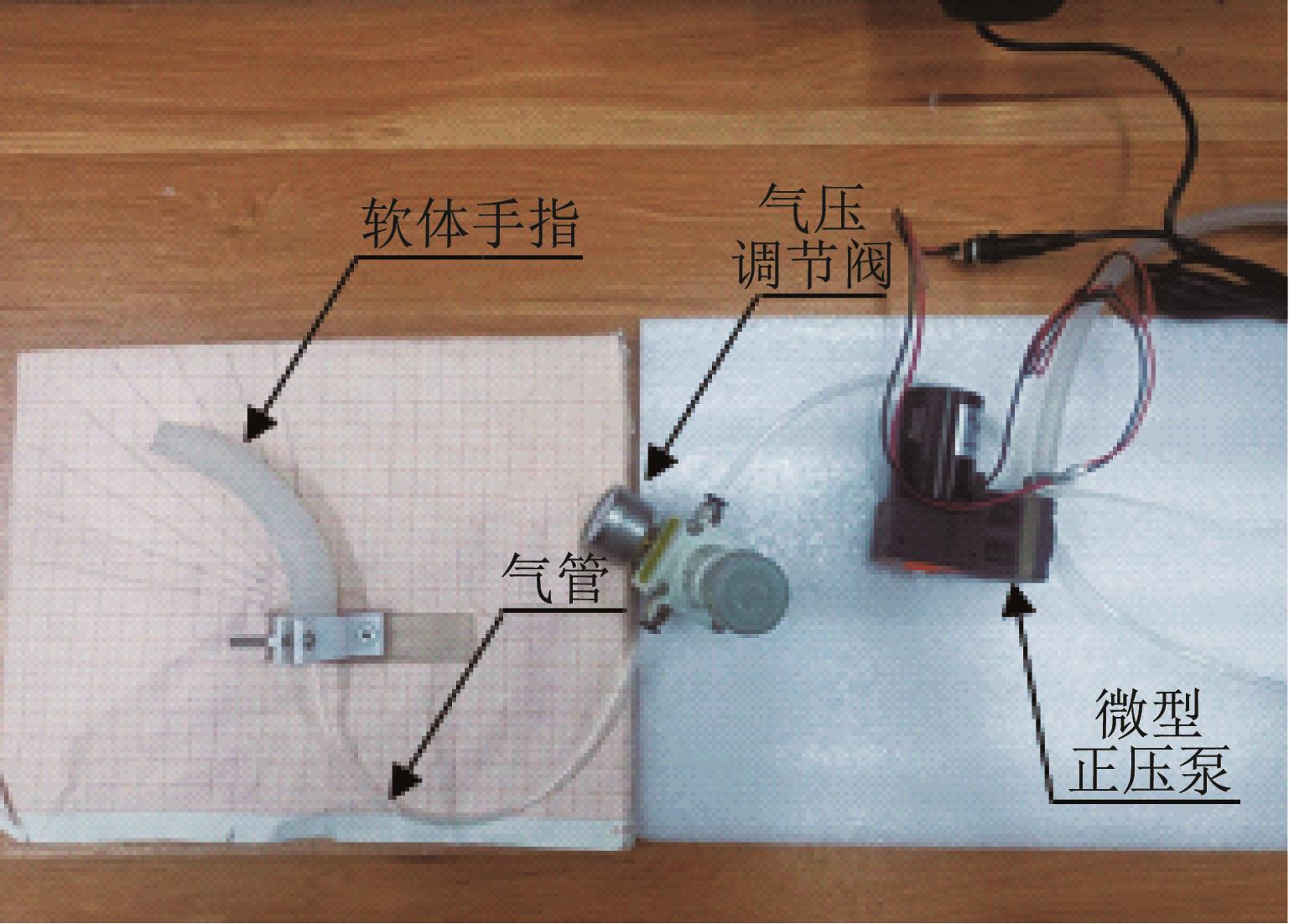
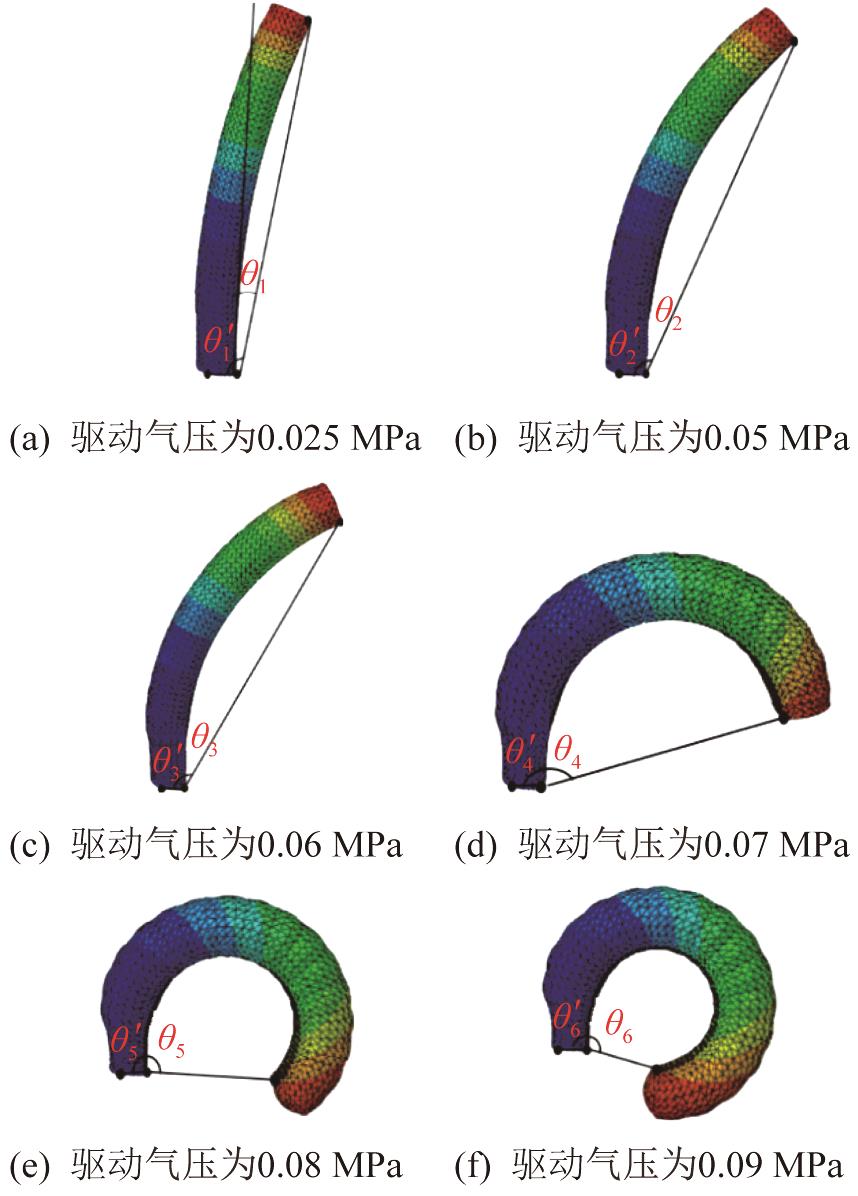
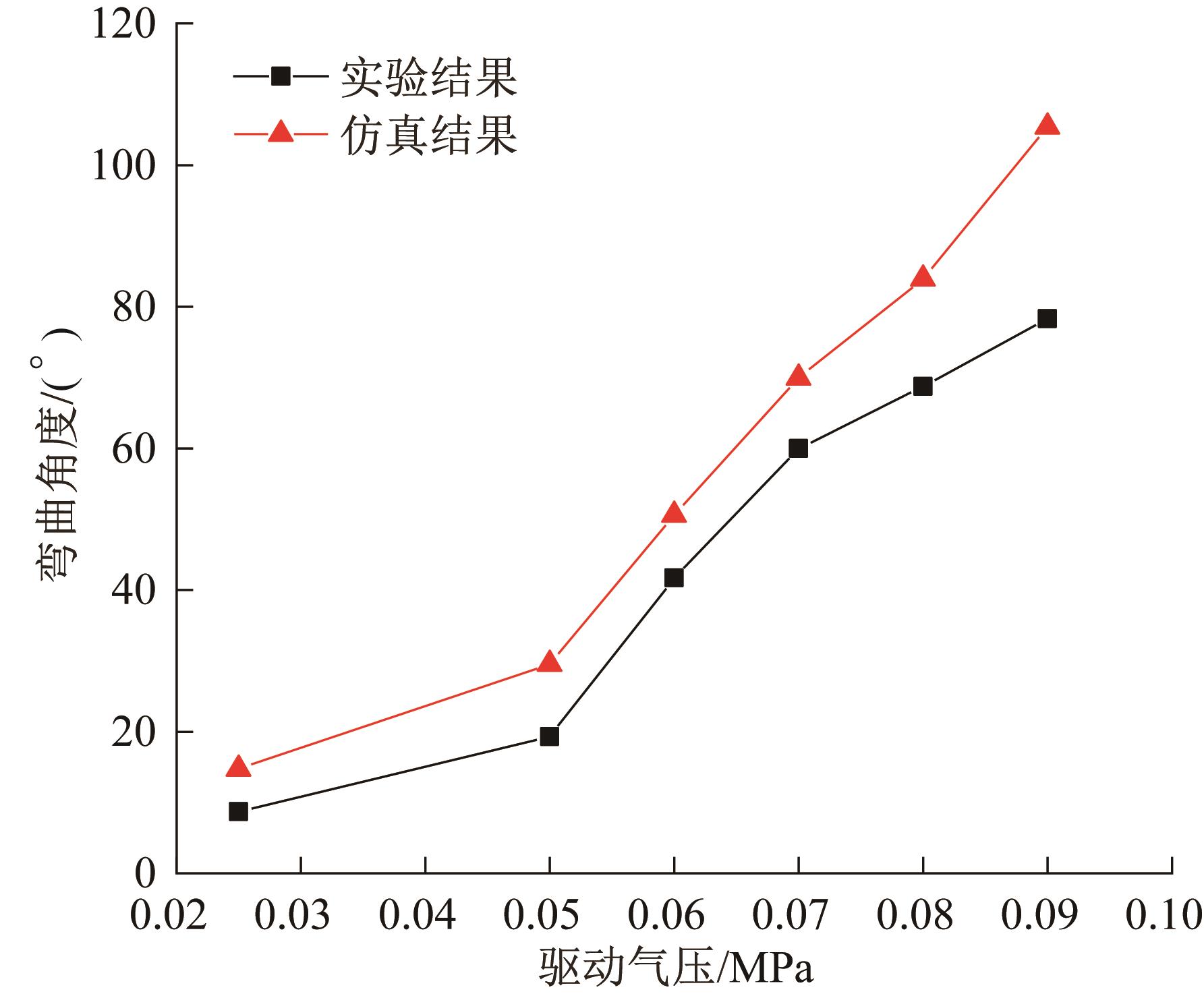
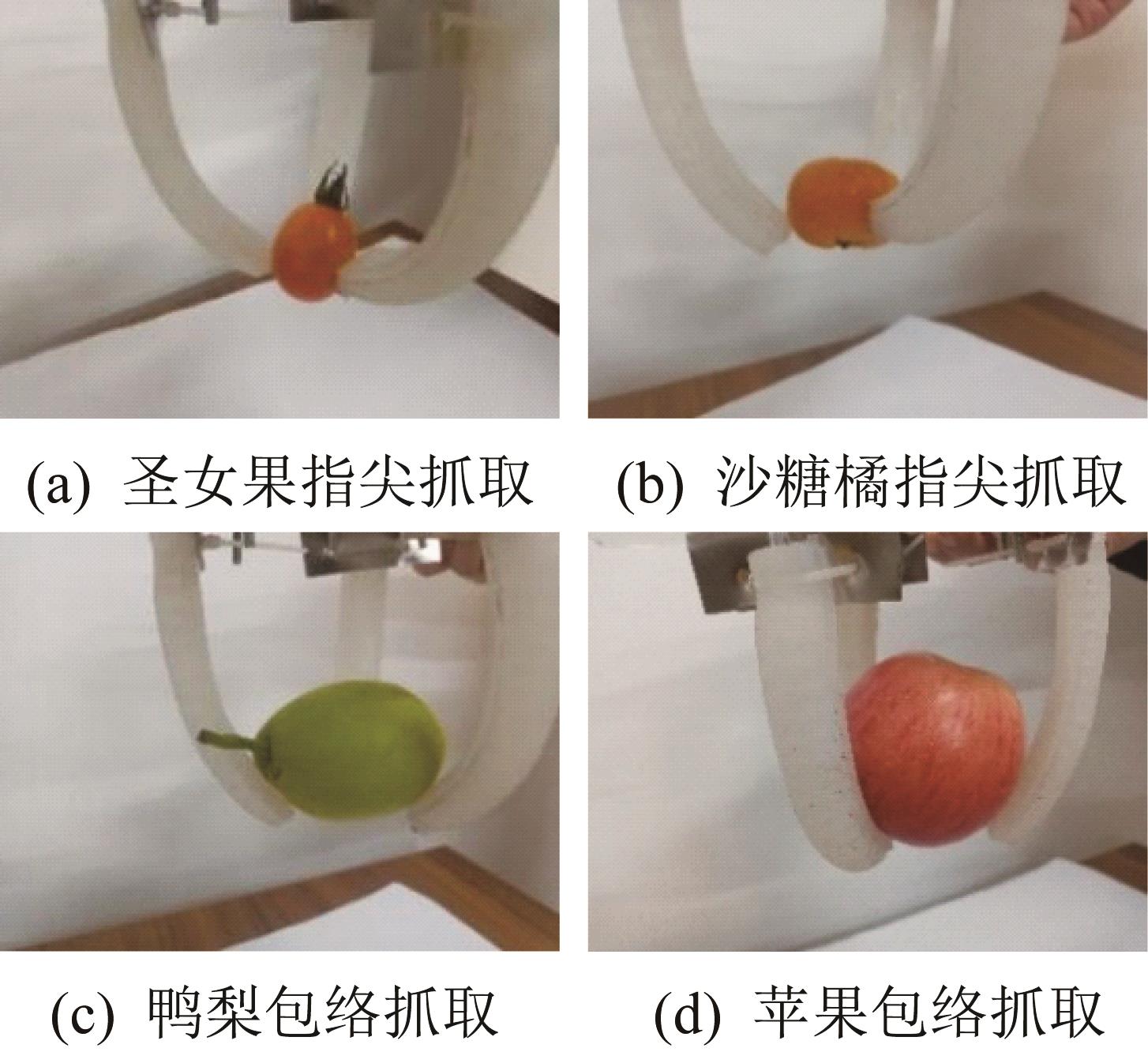
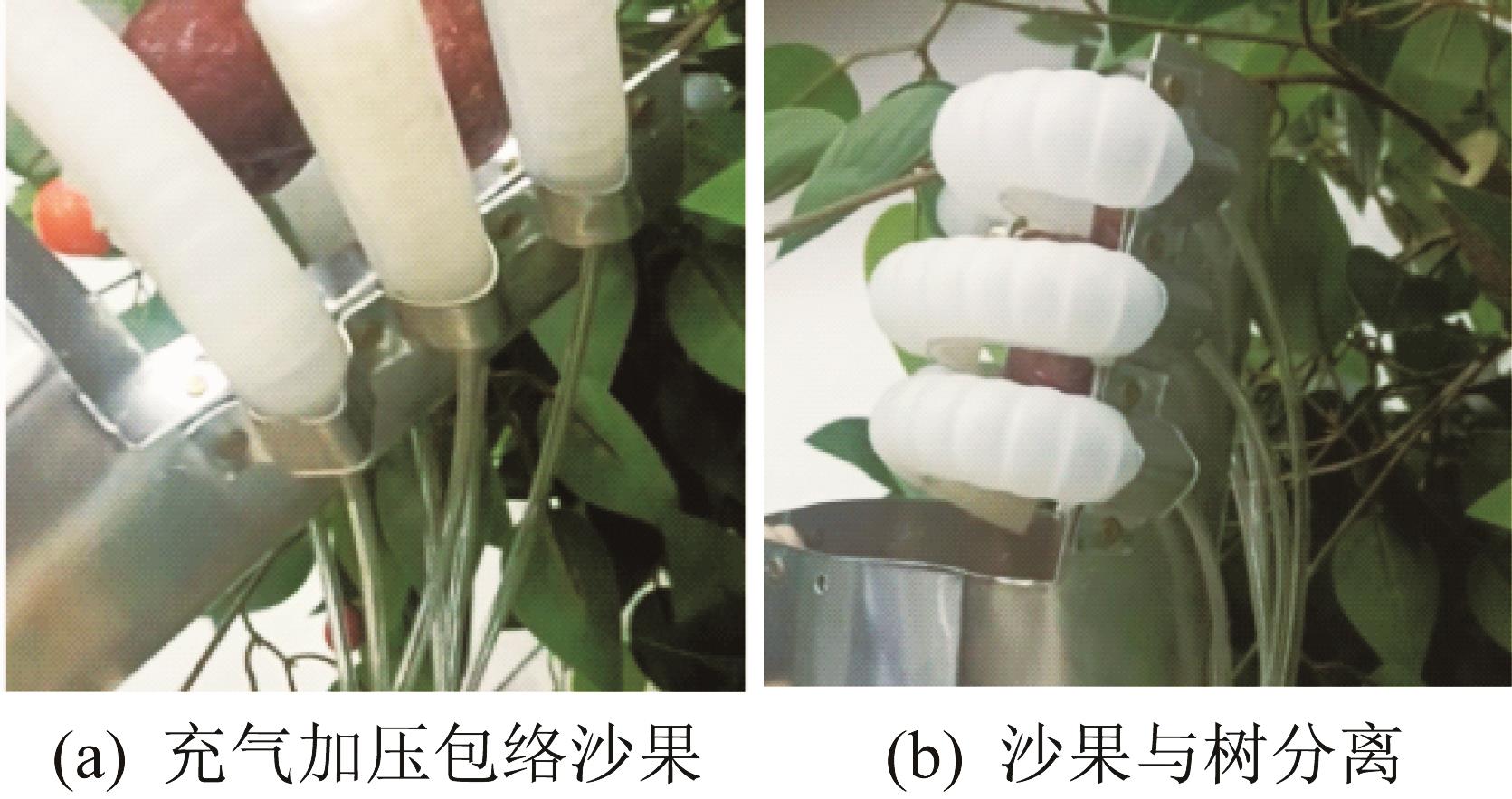
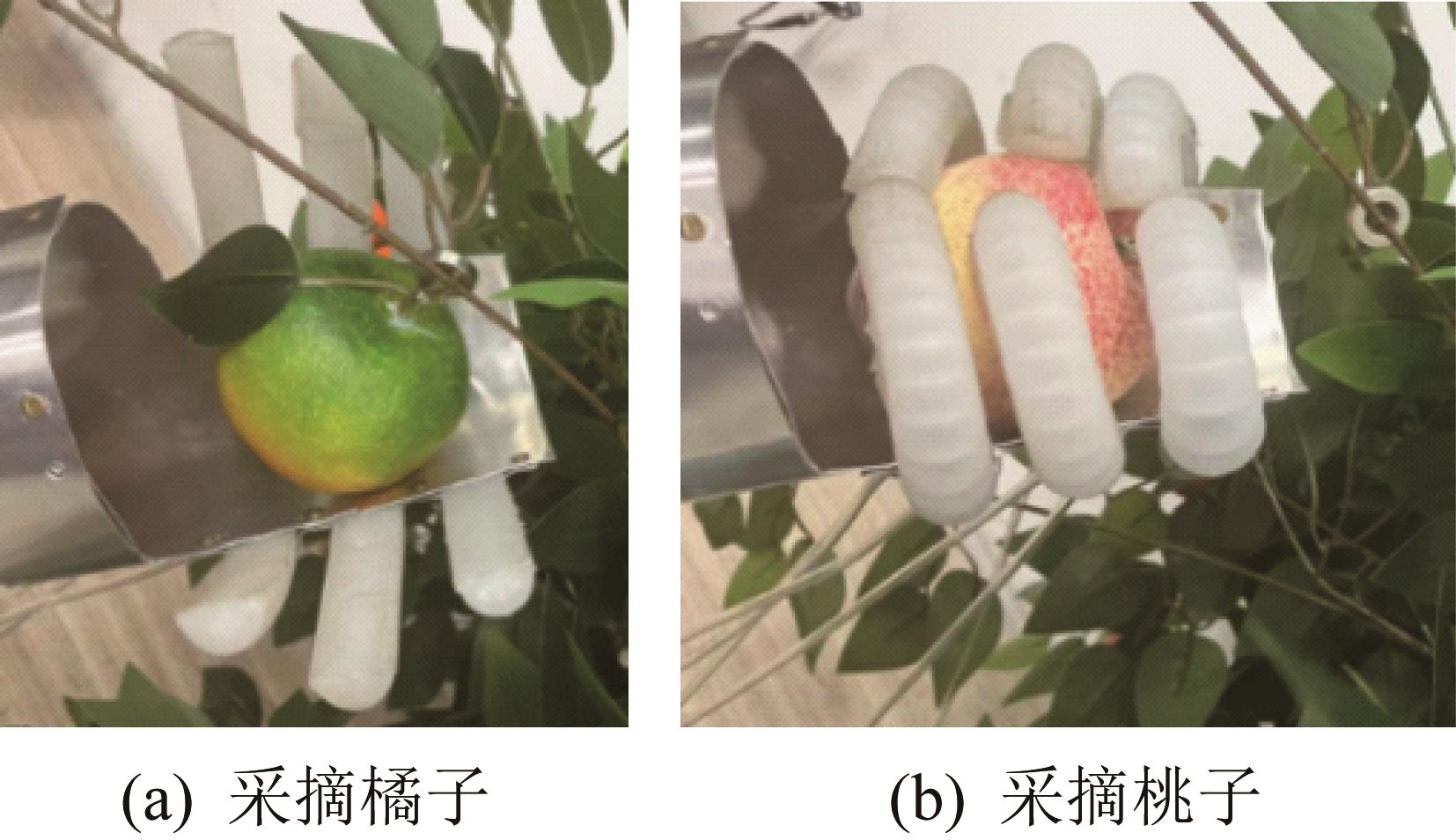
Abstract Aiming at the problems of traditional rigid picking manipulators, such as small scope of application, poor environmental adaptability and great damage to fruits and vegetables, a rigid-flexible coupling pneumatic soft picking manipulator for crabapple picking was designed. According to the characteristics and picking requirements of crabapple, the six-finger wrapped picking form was determined. Taking Longfeng fruit as an example, the bending angle calculation model for the soft finger of picking manipulator was established, and the bending angle of single finger was determined; the HY-E620 type silicone was selected as the material of soft fingers through the tensile contrast experiment of three kinds of silicone materials; the ABAQUS finite element simulation analysis of the influence of various structures on the bending performance of soft fingers was carried out, and the optimal structure was determined; the corresponding relationships between the bending angle and the output force of a single soft finger under different driving pressure conditions were measured by experiments, and the three-finger grasping experiment for various fruits under the driving pressure of 0.08 MPa was carried out, which verified the rationality of the soft finger structure. Finally, a six-finger wrapped pneumatic soft picking manipulator was trial-produced, and the picking experiments were carried out on crabapple, apple, pear and orange. The results showed that the designed picking manipulator could not only pick clustering crabapples containing 3?6 fruits with a success rate of 80%, but also pick apples, pears, oranges and other spherical fruits, which had a certain versatility, and could provide a new idea for the design and research of fruit picking manipulator.
|
|
Received: 14 April 2022
Published: 06 January 2023
|
|
|
|
Corresponding Authors:
Li-guo WU
E-mail: bluelii73@163.com;wlg0041@163.com
|
气动软体采摘机械手设计及实验研究
针对传统刚性采摘机械手适用范围小、环境适应性差及对果蔬损伤大等问题,设计了一种面向沙果采摘的刚柔耦合气动软体采摘机械手。根据沙果的结果特点以及采摘要求,确定了六指包裹式采摘形式。以龙丰果为例,建立了采摘机械手软体手指弯曲角度计算模型,确定了单指的弯曲角度;通过3种硅胶材料的拉伸对比实验,选定HY-E620型硅胶作为软体手指的材料;开展了多种结构对软体手指弯曲性能影响的ABAQUS有限元仿真分析,确定了较优的结构;利用实验测定了不同驱动气压条件下单根软体手指弯曲角度与输出力的对应关系,并在0.08 MPa驱动气压下对多种水果进行三指抓取实验,验证了软体手指结构的合理性。最后,试制了六指包裹式气动软体采摘机械手,并分别对沙果、苹果、梨和橘子等进行了采摘实验。结果表明:所设计的采摘机械手不仅对含3~6个果实的成串沙果的采摘成功率达到80%,还可采摘苹果、梨和橘子等类球形水果,具有一定的通用性,可为水果采摘机械手的设计与研究提供新思路。
关键词:
气动软体采摘机械手,
沙果采摘,
六指包裹式,
抓取实验,
有限元分析
|
|
| [1] |
VAN HENTEN E J, VAN TJIJL B A J, HEMMING J, et al. Field test of an autonomous cucumber picking robot[J]. Biosystems Engineering, 2003, 86(3): 305-313.
|
|
|
| [2] |
CHO S I, CHANG S J, KIM Y Y, et al. Development of a three degrees of freedom robot for harvesting lettuce using machine vision and fuzzy logic control[J]. Biosystems Engineering, 2002, 82(2): 143-149.
|
|
|
| [3] |
KIM S, LASCHI C, TRIMMER B. Soft robotics: a bioinspired evolution in robotics[J]. Trends in Biotechnology, 2013, 31(5): 287-294.
|
|
|
| [4] |
曹玉君,尚建忠,梁科山,等.软体机器人研究现状综述 [J].机械工程学报,2012,48(3):25-33. doi:10.3901/jme.2012.03.025
CAO Yu-jun, SHANG Jian-zhong, LIANG Ke-shan, et al. Review of soft-bodied robots[J]. Journal of Mechanical Engineering, 2012, 48(3): 25-33.
doi: 10.3901/jme.2012.03.025
|
|
|
| [5] |
RUS D, TOLLEY M T. Design, fabrication and control of soft robots[J]. Nature, 2015, 521(7553): 467-475.
|
|
|
| [6] |
WANG L, IIDA F. Deformation in soft-matter robotics: a categorization and quantitative characterization[J]. IEEE Robotics & Automation Magazine, 2015, 22(3): 125-139.
|
|
|
| [7] |
ELANGO N, FAUDZI A. A review article: investigations on soft materials for soft robot manipulations[J]. The International Journal of Advanced Manufacturing Technology, 2015, 80(5/8): 1027-1037.
|
|
|
| [8] |
HUGHES J, CULHA U, GIARDINA F, et al. Soft manipulators and grippers: a review[J]. Frontiers in Robotics and AI, 2016, 3: 69.
|
|
|
| [9] |
BOGUE R. Flexible and soft robotic grippers: the key to new markets?[J]. Industrial Robot, 2016, 43(3): 258-263.
|
|
|
| [10] |
魏琼,张永梁,游颖,等.基于多腔软体驱动器的柔性手指设计[J].工程设计学报,2020,27(4):425-432,532. doi:10.3785/j.issn.1006-754X.2020.00.057
WEI Qiong, ZHANG Yong-liang, YOU Ying, et al. Flexible finger design based on multi-cavity soft actuator[J]. Chinese Journal of Engineering Design, 2020, 27(4): 425-432, 532.
doi: 10.3785/j.issn.1006-754X.2020.00.057
|
|
|
| [11] |
MARCHESE A D, TEDRAKE R, RUS D. Dynamics and trajectory optimization for a soft spatial fluidic elastomer manipulator[J]. The International Journal of Robotics Research, 2016, 35(8): 1000-1019.
|
|
|
| [12] |
CHEN Cong, ZOU Jun. Adaptive robust control of soft bending actuators: an empirical nonlinear model-based approach[J]. Journal of Zhejiang University-SCIENCE A (Applied Physics & Engineering), 2021, 22(9): 681-694.
|
|
|
| [13] |
夏俊.柔性气动机械手的设计与控制系统研究[D].哈尔滨:哈尔滨工业大学,2021:25-40.
XIA Jun. Research on design and control system of a flexible pneumatic manipulator[D]. Harbin: Harbin Institute of Technology, 2021: 25-40.
|
|
|
| [14] |
王田苗,郝雨飞,杨兴帮,等.软体机器人:结构、驱动、传感与控制[J].机械工程学报,2017,53(13):1-13. doi:10.3901/jme.2017.13.001
WANG Tian-miao, HAO Yu-fei, YANG Xing-bang, et al. Soft robots: structure, actuation, sensing and control[J]. Journal of Mechanical Engineering, 2017, 53(13): 1-13.
doi: 10.3901/jme.2017.13.001
|
|
|
| [15] |
彭艳,刘勇敢,杨扬,等.软体机械手爪在果蔬采摘中的应用研究进展[J].农业工程学报,2018,34(9):11-20. doi:10.11975/j.issn.1002-6819.2018.09.002
PENG Yan, LIU Yong-gan, YANG Yang, et al. Research progress on application of soft robotic gripper in fruit and vegetable picking[J]. Transactions of the Chinese Society of Agricultural Engineering, 2018, 34(9): 11-20.
doi: 10.11975/j.issn.1002-6819.2018.09.002
|
|
|
| [16] |
陈昕,华超,朱银龙,等.水果采摘机器人末端执行器的研究进展[J].林业机械与木工设备,2020,48(9):4-10. doi:10.3969/j.issn.2095-2953.2020.09.001
CHEN Xin, HUA Chao, ZHU Yin-long, et al. Research progress in fruit picking robot end effectors[J]. Forestry Machinery and Woodworking Equipment, 2020, 48(9): 4-10.
doi: 10.3969/j.issn.2095-2953.2020.09.001
|
|
|
| [17] |
KONDO N, YATA K, LIDA M, et al. Development of an end effector for a tomato cluster harvesting robot[J]. Engineering in Agriculture Environment & Food, 2010, 3(1): 20-24.
|
|
|
| [18] |
GALLOWAY K C, BECKER K P, PHILLIPS B, et al. Soft robotic grippers for biological sampling on deep reefs[J]. Soft Robotics, 2016, 3(1): 23-33.
|
|
|
| [19] |
WANG Z, HIRAI S. Soft gripper dynamics using a line-segment model with an optimization-based parameter identification method[J]. IEEE Robotics and Automation Letters, 2017, 2(2): 624-631.
|
|
|
| [20] |
李健,戴楚彦,王扬威,等.面向草莓抓取的气动四叶片软体抓手研制[J].哈尔滨工业大学学报,2022,54(1):105-113. doi:10.11918/202103107
LI Jian, DAI Chu-yan, WANG Yang-wei, et al. Development of pneumatic four blade soft grasp for grabbing strawberry[J]. Journal of Harbin Institute of Technology, 2022, 54(1): 105-113.
doi: 10.11918/202103107
|
|
|
| [21] |
赵云伟,耿德旭,刘晓敏,等.气动柔性果蔬采摘机械手运动学分析与实验[J].农业机械学报,2019,50(8):31-42. doi:10.6041/j.issn.1000-1298.2019.08.004
ZHAO Yun-wei, GENG De-xu, LIU Xiao-min, et al. Kinematics analysis and experiment on pneumatic flexible fruit and vegetable picking manipulator[J]. Transactions of the Chinese Society of Agricultural Machinery, 2019, 50(8): 31-42.
doi: 10.6041/j.issn.1000-1298.2019.08.004
|
|
|
| [22] |
华超,褚凯梅,陈昕,等.软体水果采摘机械手系统设计分析与试验[J].林业工程学报,2021,6(3):127-132.
HUA Chao, CHU Kai-mei, CHEN Xin, et al. Design, analysis and experimental of soft picking manipulator system for fruit harvesting[J]. Journal of Forestry Engineering, 2021, 6(3): 127-132.
|
|
|
| [23] |
刘刚.北方沙果栽培技术[J].种子科技,2018,36(2):79-82. doi:10.3969/j.issn.1005-2690.2018.02.058
LIU Gang. Cultivation technology of northern sand fruit[J]. Seed Science and Technology, 2018, 36(2): 79-82.
doi: 10.3969/j.issn.1005-2690.2018.02.058
|
|
|
| [24] |
MOKARRAM H, PAUL S. More hyperelastic models for rubber-like materials: consistent tangent operators and comparative study[J]. Journal of the Mechanical Behavior of Materials, 2013, 22(1/2): 27-50.
|
|
|
| [25] |
钱胜,陆益民,杨咸启,等.橡胶材料超弹性本构模型选取及参数确定概述[J].橡胶科技,2018,16(5):5-10. doi:10.3969/j.issn.2095-5448.2018.05.001
QIAN Sheng, LU Yi-min, YANG Xian-qi, et al. Overview of selection and parameter determination for hyperelastic constitutive model of rubber material[J]. Rubber Science and Technology, 2018, 16(5): 5-10.
doi: 10.3969/j.issn.2095-5448.2018.05.001
|
|
|
| [26] |
张晗.气动软体机械手抓取性能研究[D].西安:西安理工大学,2019:30-60. doi:10.33737/gpps19-bj-117
ZHANG Han. Research on grasping performance of pneumatic soft gripper[D]. Xi’an: Xi’an University of Technology, 2019: 30-60.
doi: 10.33737/gpps19-bj-117
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|