| Product Innovation Design |
|


|
|
|
| Design and compliance analysis of large stroke flexible ball hinge with orthogonal reeds |
Chao XIE( ),Yunzhuang CHEN,Guangnan SHI,Leijie LAI() ),Yunzhuang CHEN,Guangnan SHI,Leijie LAI() |
| School of Mechanical and Automotive Engineering, Shanghai University of Engineering Science, Shanghai 201620, China |
|
|
|
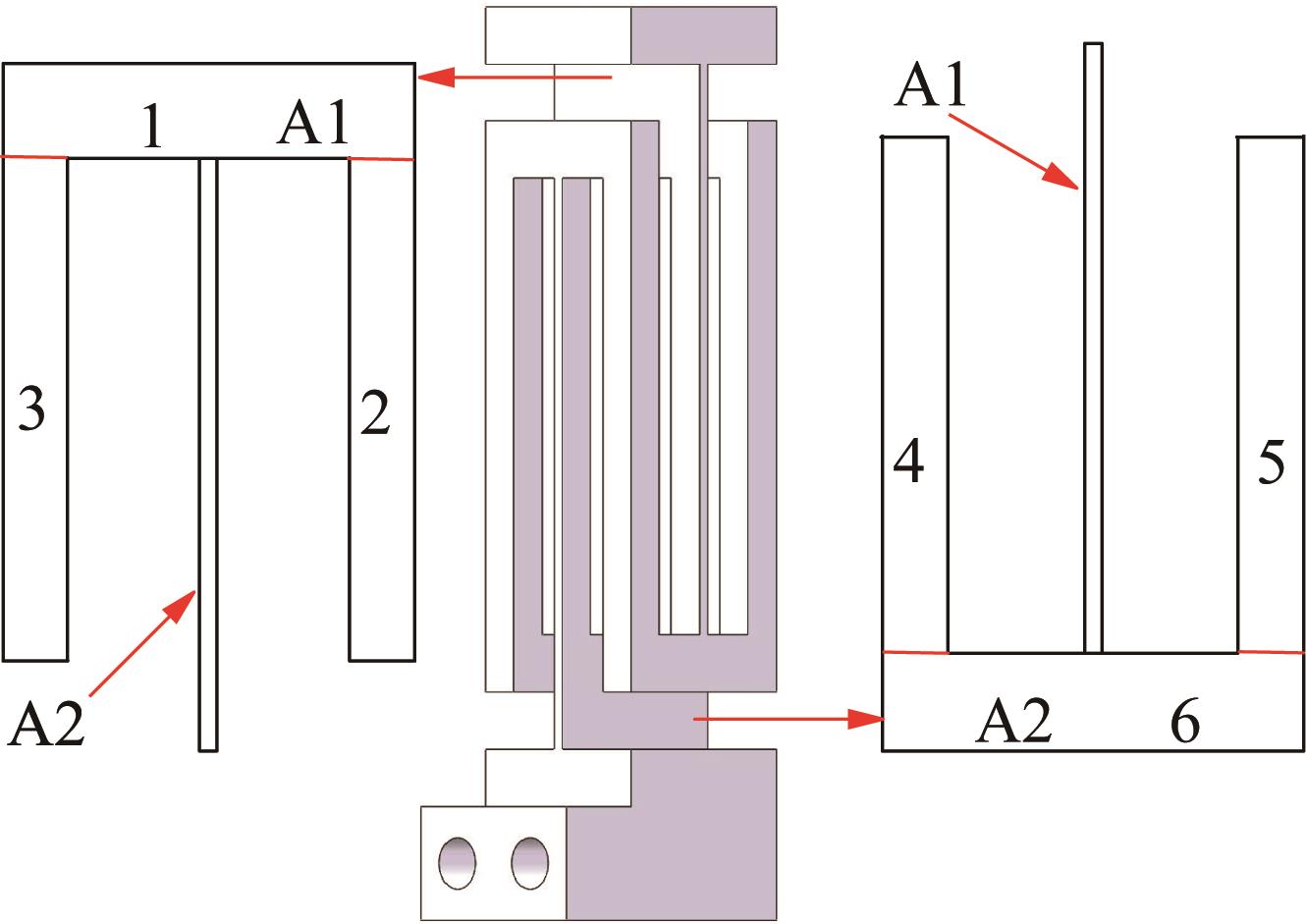
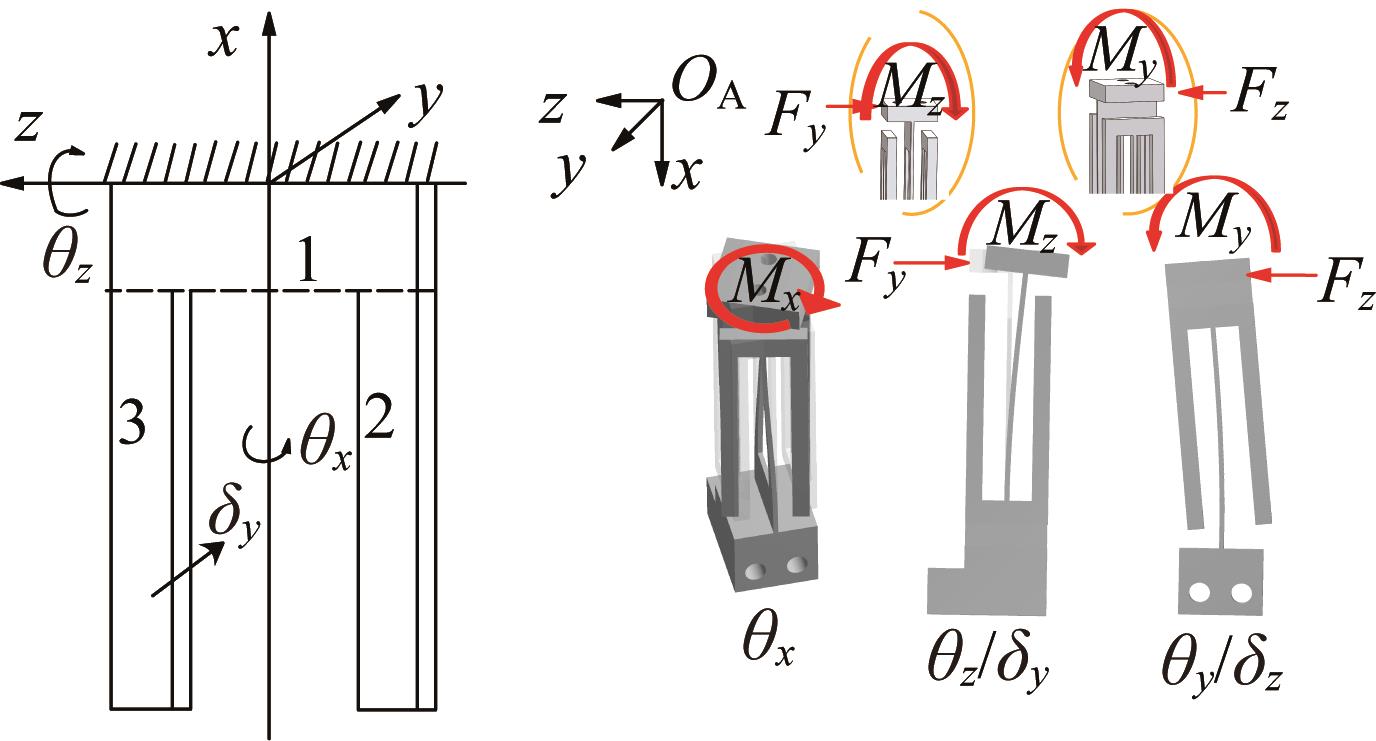
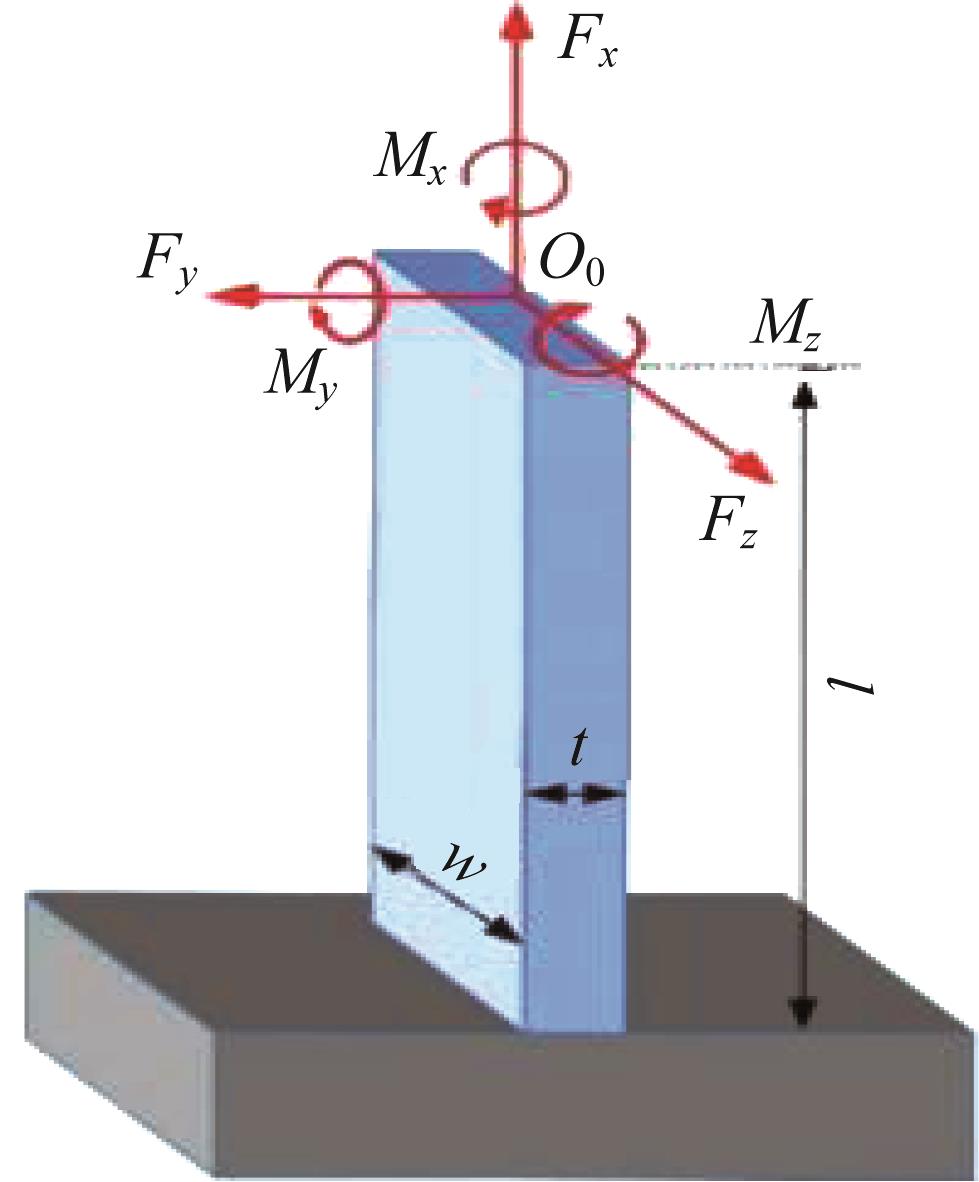
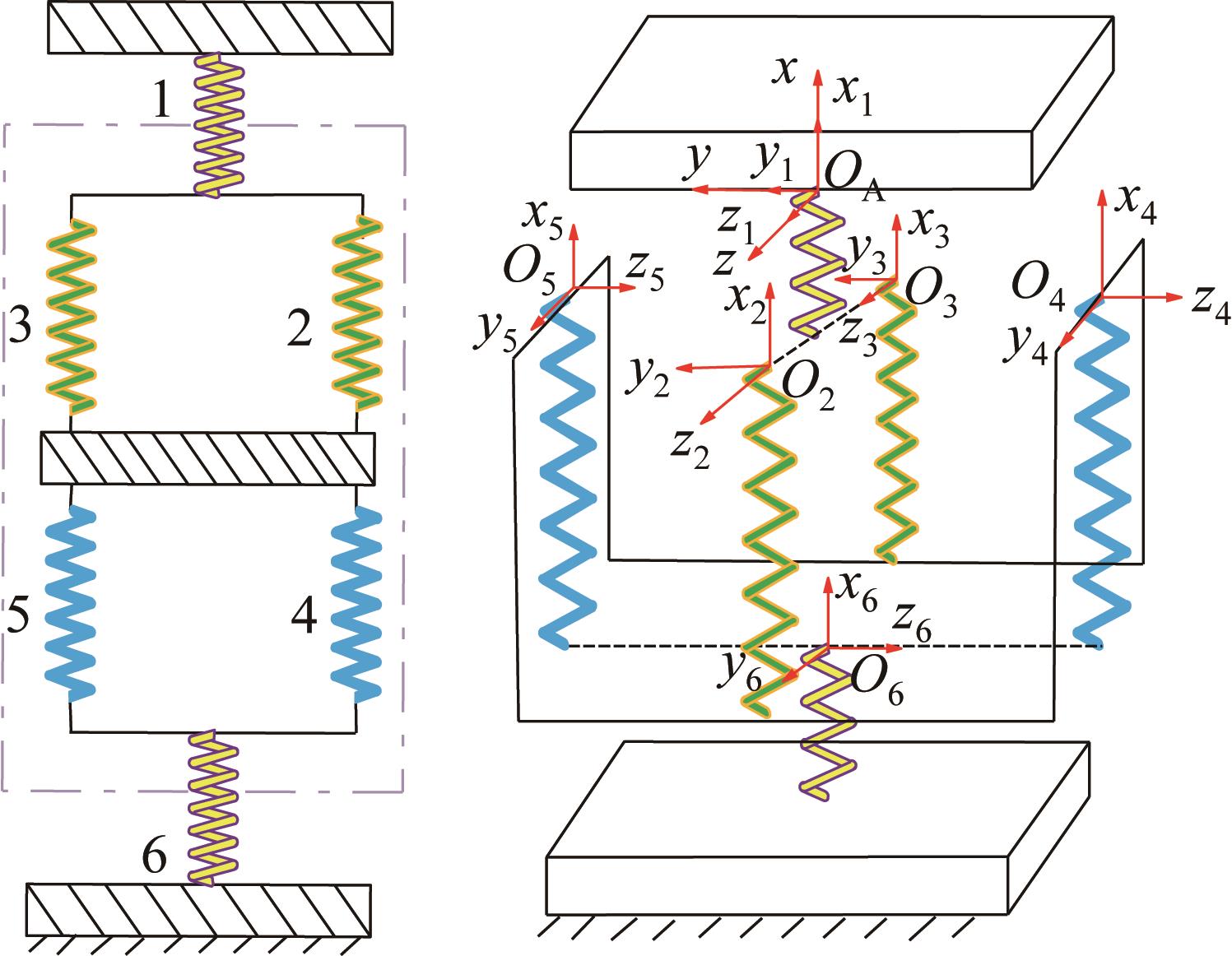
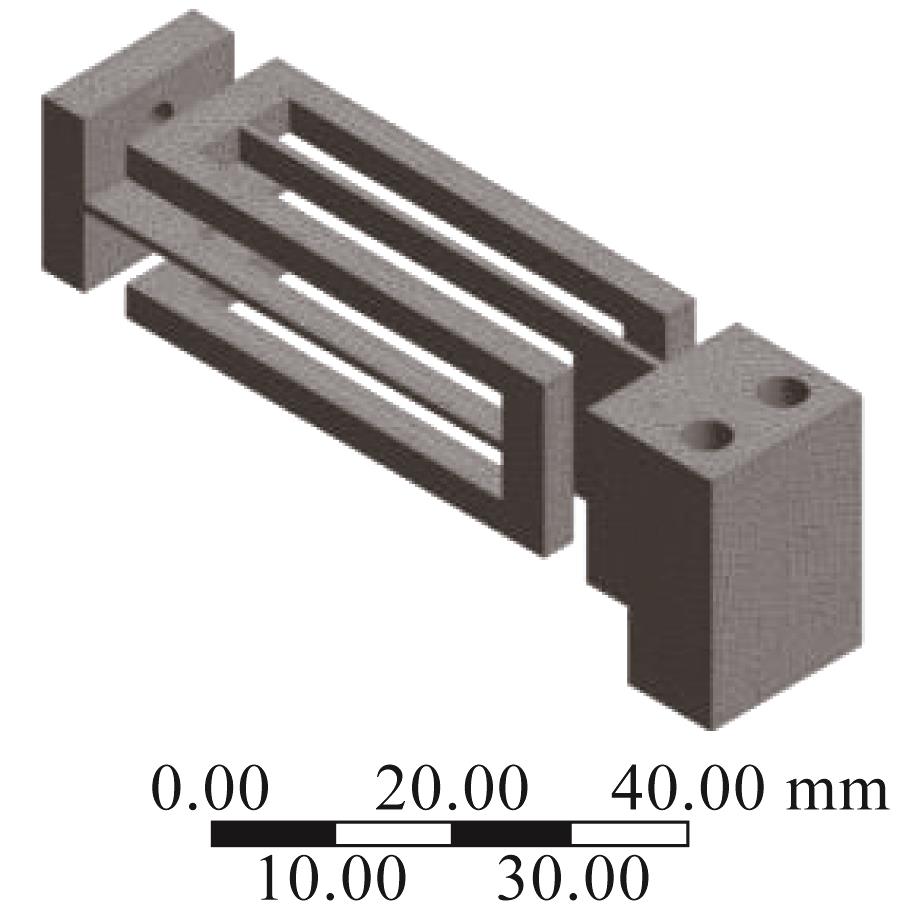
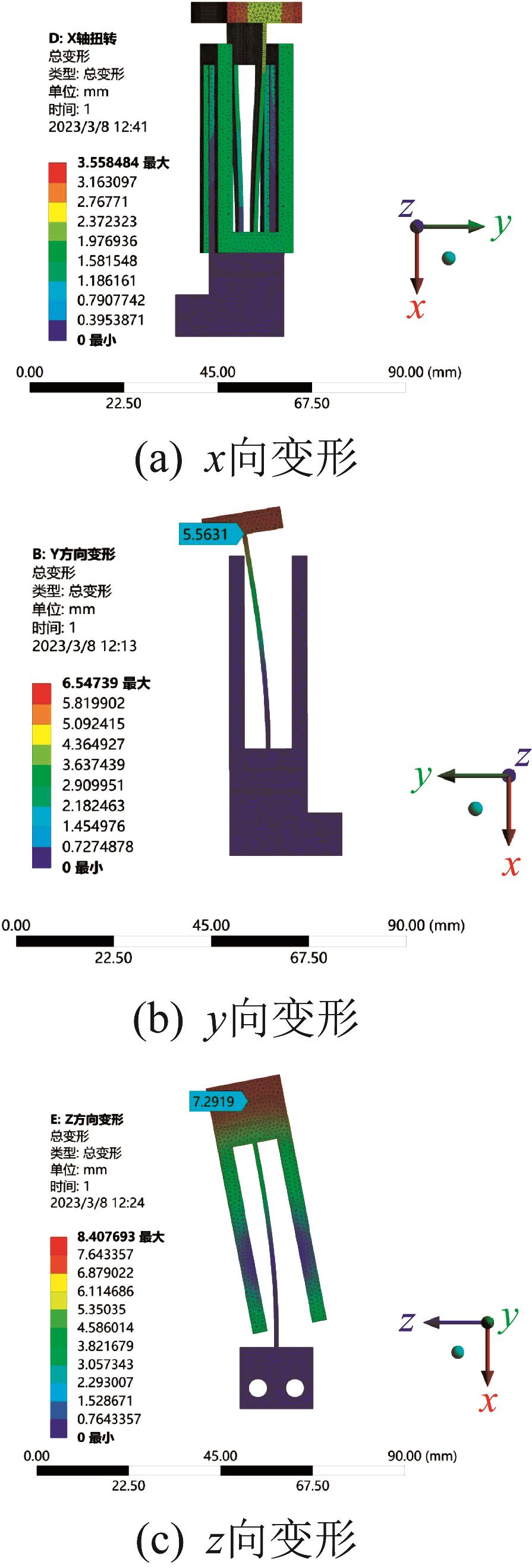
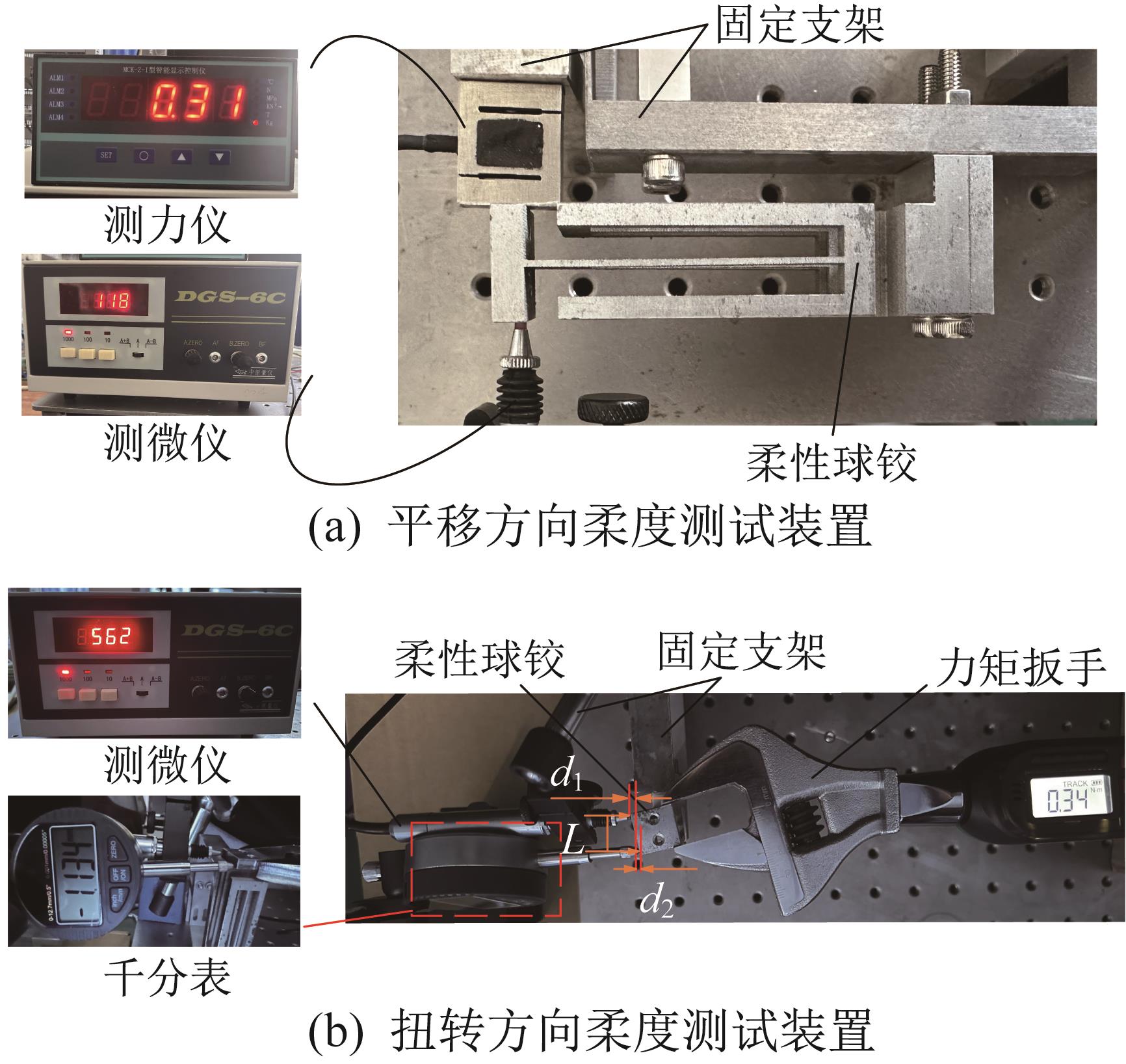
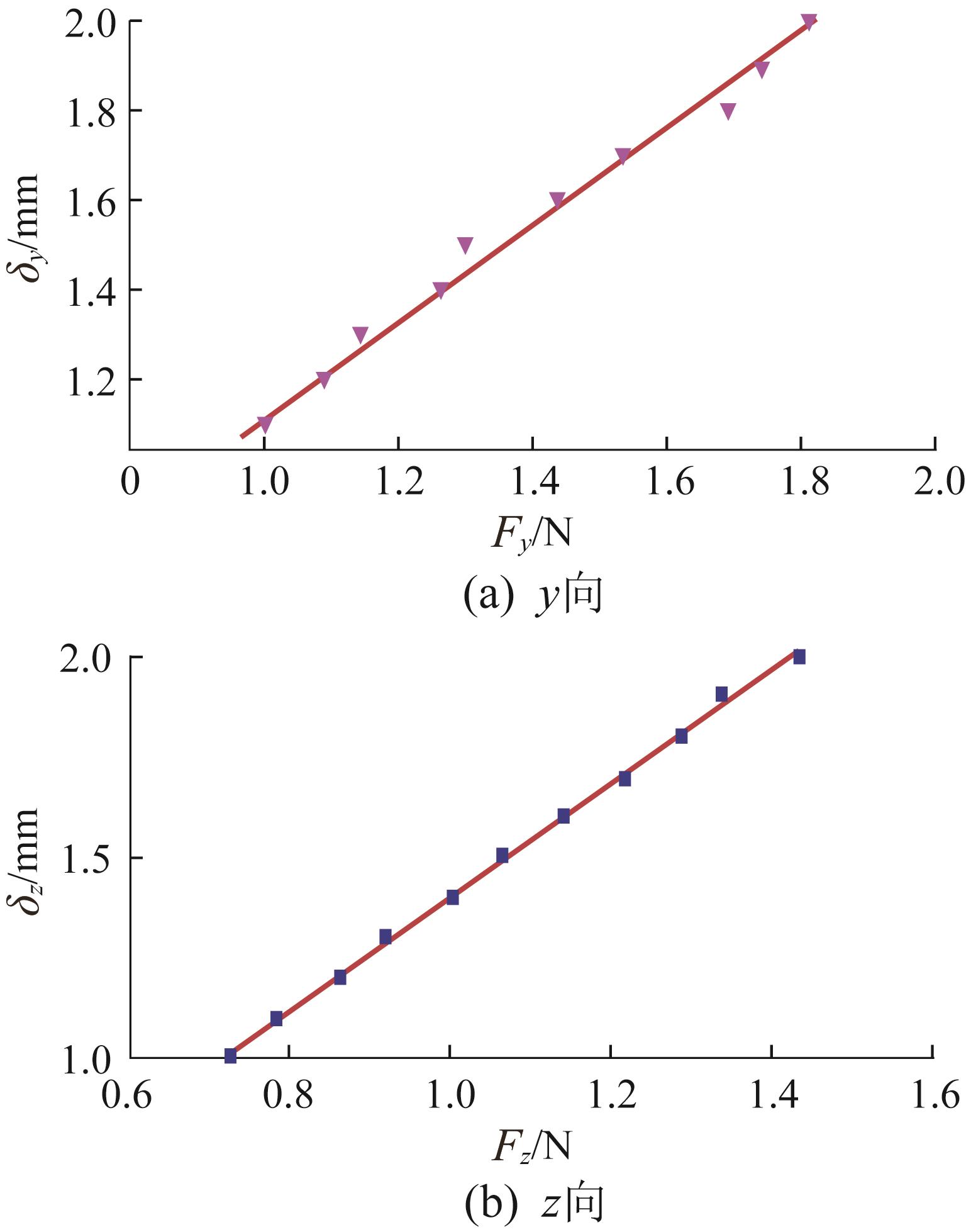
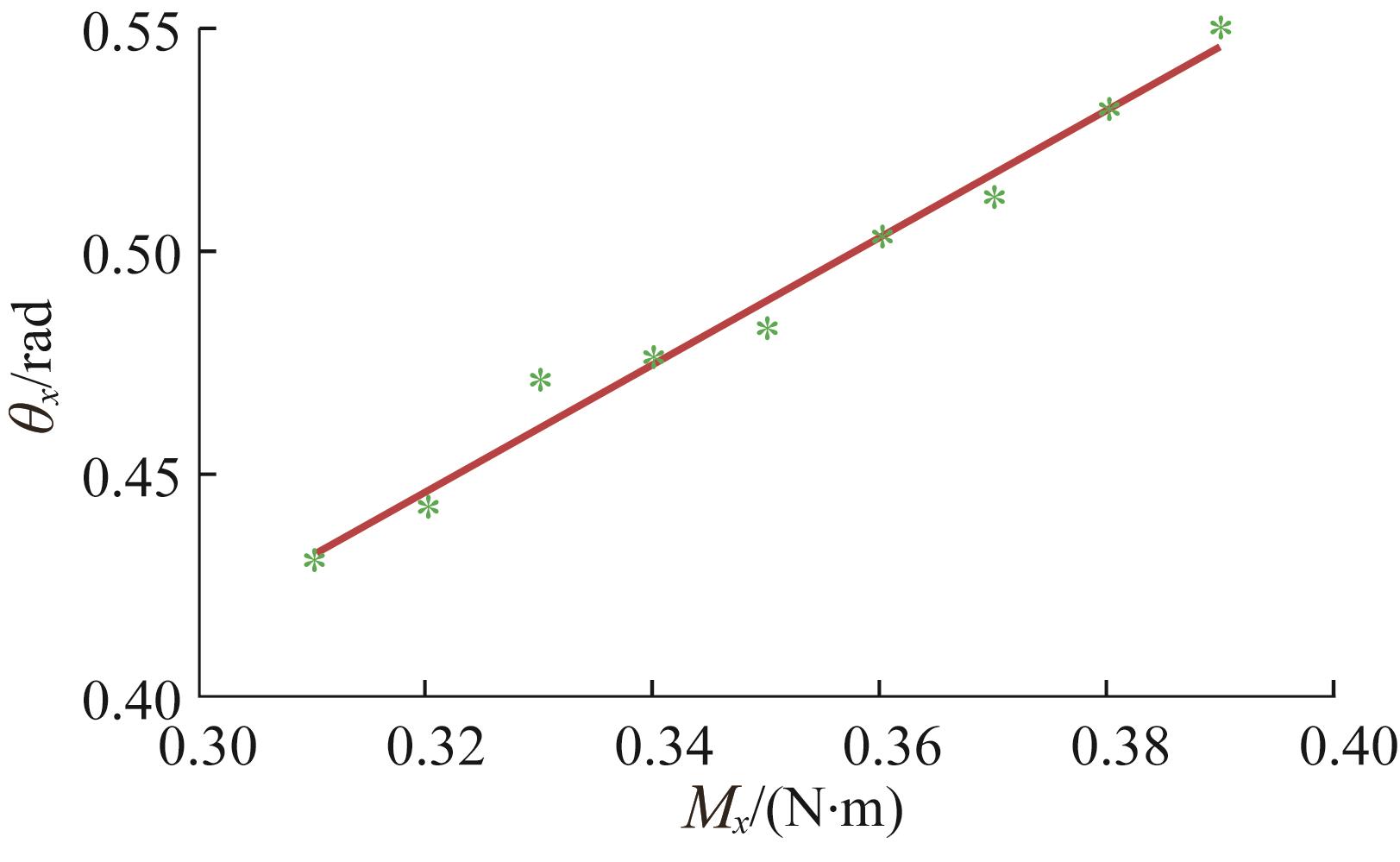
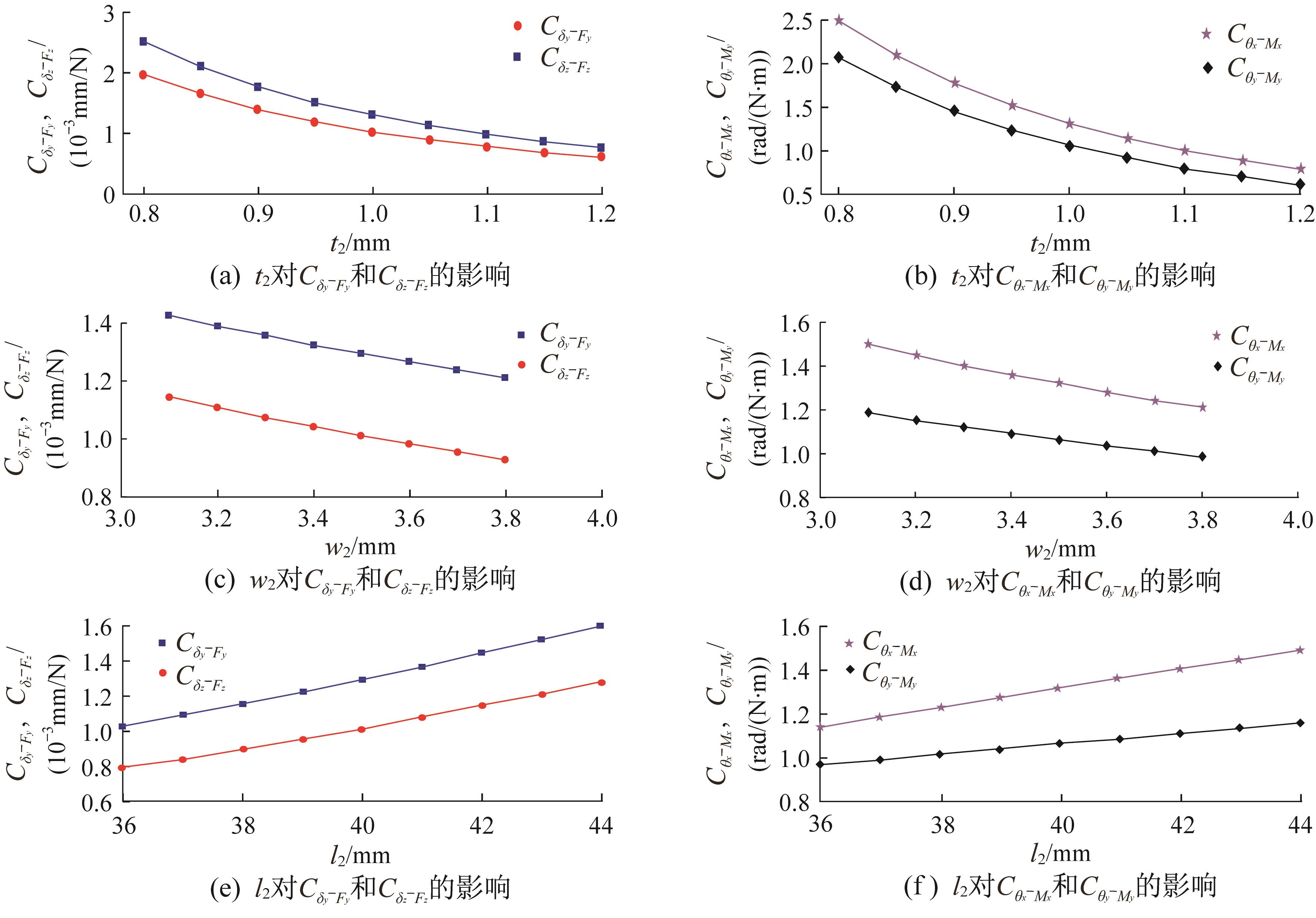
Abstract The traditional notched flexible ball hinge has smaller working stroke, complex structural configuration and compliance calculation, and high processing requirements, so it can not be applied to the occasions requiring large stroke. Therefore, a large stroke flexible ball hinge with orthogonal reeds was designed, which meant that the reed beam with large deformation capacity could form a Hooke joint through orthogonal combination, enabling it to achieve movement in three functional axis directions. The flexible ball hinge had the advantages of simple structural configuration, easy processing and manufacturing, and large working stroke. Based on the compliance matrix and connection type of a single reed beam of the flexible ball hinge, the global compliance matrix of the flexible ball hinge was modeled and calculated by the compliance matrix method and coordinate transformation method. The established compliance model was verified through finite element simulation and experimental test, and the influence of geometric parameters of the flexible ball hinge on compliance was analyzed. The results showed that the relative error between the theoretical calculating value and the simulated value of compliance was basically within 10%, and the relative error between the calculated value and the test value was within 8%; the influence degree of geometric parameters on compliance was in descending order: thickness, width and length of reed beam 2. The research results can provide reference for the diversified design of large stroke spatial compliant mechanism.
|
|
Received: 08 March 2023
Published: 03 November 2023
|
|
|
|
Corresponding Authors:
Leijie LAI
E-mail: silencexc@126.com;lailj@sues.edu.cn
|
正交簧片型大行程柔性球铰设计及柔度分析
传统缺口型柔性球铰的工作行程较小,且存在结构构型及柔度计算复杂、加工工艺要求高等问题,不能应用于需大行程的场合。为此,设计了一种正交簧片型大行程柔性球铰,即将具有较大变形能力的簧片梁通过正交组合形成虎克铰,使其能够实现3个功能轴线方向的运动。该柔性球铰具有结构构型简单、加工制作容易和工作行程较大等优点。根据柔性球铰单个簧片梁的柔度矩阵及连接方式,采用柔度矩阵法和坐标变换方法,对柔性球铰的全局柔度矩阵进行建模和计算,通过有限元仿真和实验测试对所建立的柔度模型进行验证,并分析了柔性球铰几何参数对柔度的影响规律。结果表明:柔度理论计算值与仿真值的相对误差基本在10%以内,与测试值的相对误差在8%以内;几何参数对柔度影响程度从大到小依次是柔性簧片梁2的厚度、宽度、长度。研究结果可以为大行程空间柔顺机构的多样化设计提供参考。
关键词:
簧片,
柔性球铰,
大行程,
有限元分析,
柔度
|
|
| [1] |
姜玉涛,张银.双轴椭圆切口型柔性球铰柔度建模及分析[J].自动化与仪器仪表,2022(2):33-42.
JIANG Y T, ZHANG Y. Compliance modeling and analysing of double-axis elliptical are flexure hinge[J]. Automation and Instrumentation, 2022 (2): 33-42.
|
|
|
| [2] |
SETO W, SITTI M. Tank-like module-based climbing robot using passive complaint joints[J]. IEEE/ASME Transaction on Mechatronics, 2013, 18(1): 397-408.
|
|
|
| [3] |
曹毅,王保兴,孟刚,等. 大行程三平动柔性微定位平台的设计分析及优化[J].机械工程学报,2020,56(17):71-81. doi:10.3901/jme.2020.17.071
CAO Y, WANG B X, MENG G, et al. Design analysis and optimization of large range spatial translational compliant micro-positioning stage[J]. Journal of Mechanical Engineering, 2020, 56(17): 71-81.
doi: 10.3901/jme.2020.17.071
|
|
|
| [4] |
李立建,马爱霞,姚建涛,等. 柔性并联六维力传感器力映射解析研究[J].机械工程学报,2017,53(7):30-38. doi:10.3901/jme.2017.07.030
LI L J, MA A X, YAO J T, et al. Force mapping analytical research of flexible parallel six-axis force/torque sensor[J]. Journal of Mechanical Engineering, 2017, 53(7): 30-38.
doi: 10.3901/jme.2017.07.030
|
|
|
| [5] |
ZHENG Y L, YONG S I, CHOI H R, et al. An automated focusing method for a parallel micro-manipulator alignment[J]. Microsystem Technologies, 2016, 22(6): 1501-1509.
|
|
|
| [6] |
SINNO A, RUAUX P, CHASSAGNE L, et al. Enlarged atomic force microscopy scanning scope: Novel sample-holder device with millimeter range[J]. Review of Scientific Instruments, 2007, 78(9): 095107-095117.
|
|
|
| [7] |
LAN H, DING Y, LIU L, et al. Review of the wafer stage for nanoimprint lithography[J]. Microelectronic Engineering, 2007, 84 (4): 684-688.
|
|
|
| [8] |
于靖军,郝广波,陈贵敏,等. 柔性机构及其应用研究进展[J].机械工程学报,2015,51(13):53-68. doi:10.3901/jme.2015.13.053
YU J J, HAO G B, CHEN G M, et al. Research progress in flexible mechanisms and their applications[J]. Journal of Mechanical Engineering, 2015, 51(13): 53-68.
doi: 10.3901/jme.2015.13.053
|
|
|
| [9] |
杨德华,程颖,吴常铖,等. 一种基于双正交弹性簧片的球链:CN108050151A[P].2018-05-18.
YANG D H, CHENG Y, WU C C, et al. A ball chain based on biorthogonal elastic spring: CN108050151A[P]. 2018-05-18.
|
|
|
| [10] |
LONBONTIU N, GARLOBONTIU N, GARCIAE E . Two-axis flexure hinges with axially collocated and symmetric notches[J]. Computers and Structures, 2003,81: 1329-1341.
|
|
|
| [11] |
朱仁胜,沈健.双轴柔性铰链柔度的设计计算[J].合肥工业大学学报,2009,32(9):1370-1373.
ZHU R S, SHEN J. Design and calculation of flexibility of two-axis flexible hinge[J]. Journal of Hefei University of Technology, 2009, 32(9): 1370-1373.
|
|
|
| [12] |
陈应舒,朱淳逸. 椭圆弧型柔性球铰的柔度矩阵计算与分析[J].机械设计与研究,2015,31(5):51-54,61.
CHEN Y S, ZHU C Y. Calculation and analysis of flexibility matrix of elliptical arc flexible spherical joint[J]. Mechanical Design and Research, 2015, 31(5): 51-54, 61.
|
|
|
| [13] |
LOBONTIU N.Compliant mechanisms: Design of flexure hinges[M]. London: CRC Press, 2003.
|
|
|
| [14] |
于靖军,毕树生,裴旭,等.柔性设计:柔性机构的分析与综合[M].北京:高等教育出版社,2018:107-114.
YU J J, BI S S, PEI X, et al. Flexible design: Analysis and synthesis of flexible mechanisms[M]. Beijing: Higher Education Press, 2018: 107-114.
|
|
|
| [15] |
李政.二自由度大行程微定位平台设计与运动控制[D].天津:天津大学,2014:20-27.
LI Z. Design and motion control of two-degree-of-freedom large-stroke micro-positioning platform[D]. Tianjin: Tianjin University, 2014: 20-27.
|
|
|
| [16] |
刘鸿文.材料力学[M].北京:高等教育出版社,1992.
LIU H W. Material mechanics[M]. Beijing: Higher Education Press, 1992.
|
|
|
| [17] |
AL-JODAH A, SHIRINZADEH B, GHAFARIAN M, et al. Modeling and a cross-coupling compensation control methodology of a large range 3-DOF micropositioner with low parasitic motions[J]. Mechanism and Machine Theory, 2023, 162: 104334.
|
|
|
| [18] |
于阳,王学问,徐振邦,等.基于柔性铰链的大口径望远镜并联调整机构[J].光学精密工程,2023,31(3):352-362. doi:10.37188/ope.20233103.0352
YU Y, WANG X W, XU Z B, et al. Parallel adjustment mechanism for large aperture telescope based on flexible hinges[J]. Optical Precision Engineering, 2023, 31(3): 352-362.
doi: 10.37188/ope.20233103.0352
|
|
|
| [19] |
杨春辉,刘平安.圆弧型柔性球铰柔度设计计算[J].工程设计学报,2014,21(4):389-392,404. doi:10.3785/j.issn.1006-754X.2014.04.014
YANG C H, LIU P A. Design and calculation of flexibility of circular arc flexible spherical joint[J]. Chinese Journal of Engineering Design, 2014, 21(4): 389-392, 404.
doi: 10.3785/j.issn.1006-754X.2014.04.014
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|