| Mechanical Bionic Design |
|


|
|
|
| Design and analysis of flexible bending actuator driven by electrohydrodynamic pumps |
Tao ZHANG1( ),Kaisong WANG1(),Wei TANG2(),Kecheng QIN2,Yang LIU1,Yuhao SHI3,Jun ZOU2 ),Kaisong WANG1(),Wei TANG2(),Kecheng QIN2,Yang LIU1,Yuhao SHI3,Jun ZOU2 |
1.School of Mechanical Engineering, Anhui University of Science and Technology, Huainan 232001, China
2.State Key Laboratory of Fundamental Components of Fluid Power and Mechatronic Systems, Zhejiang University, Hangzhou 310058, China
3.School of Mechanical Engineering, Yanshan University, Qinhuangdao 066000, China |
|
|
|
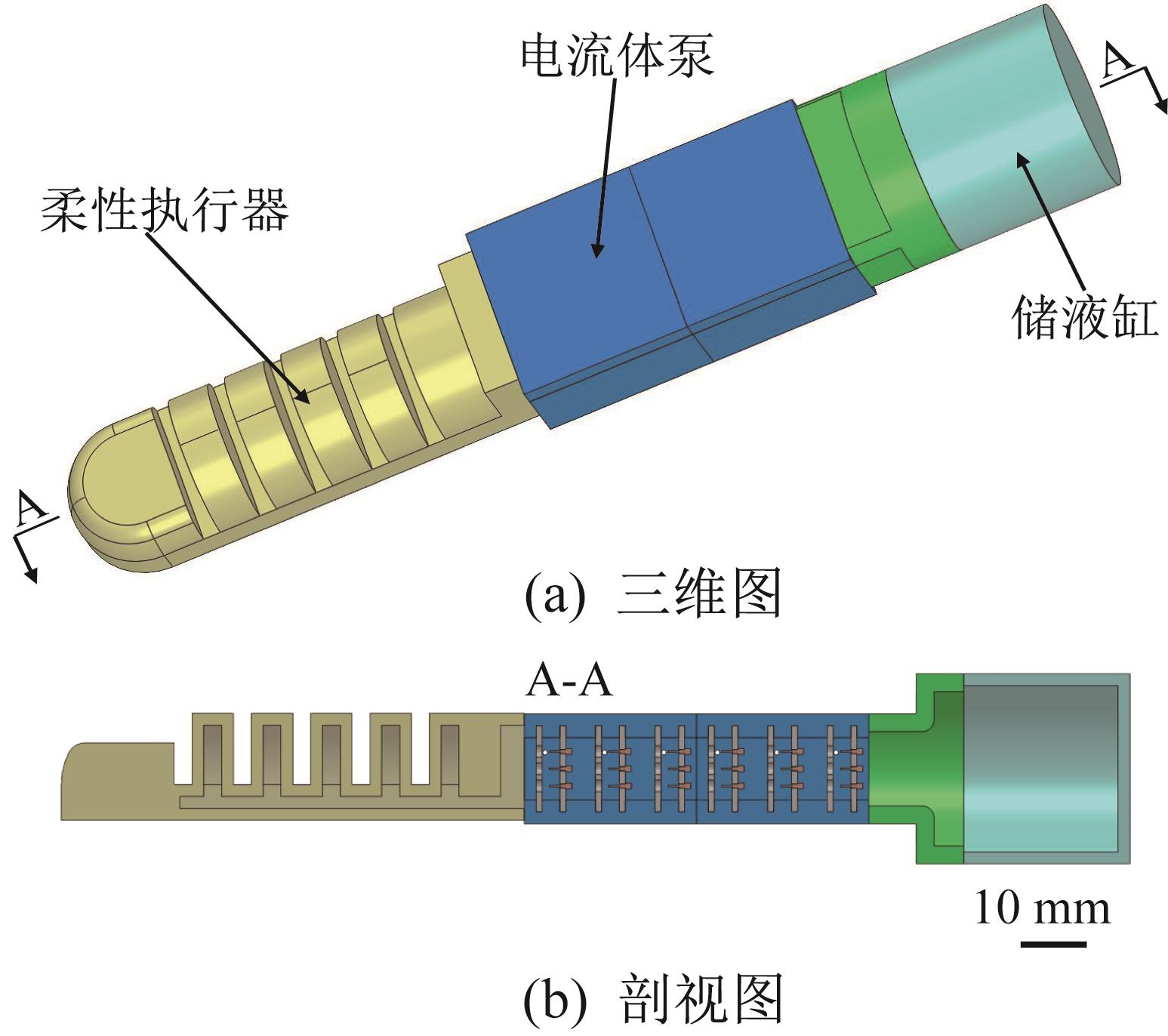
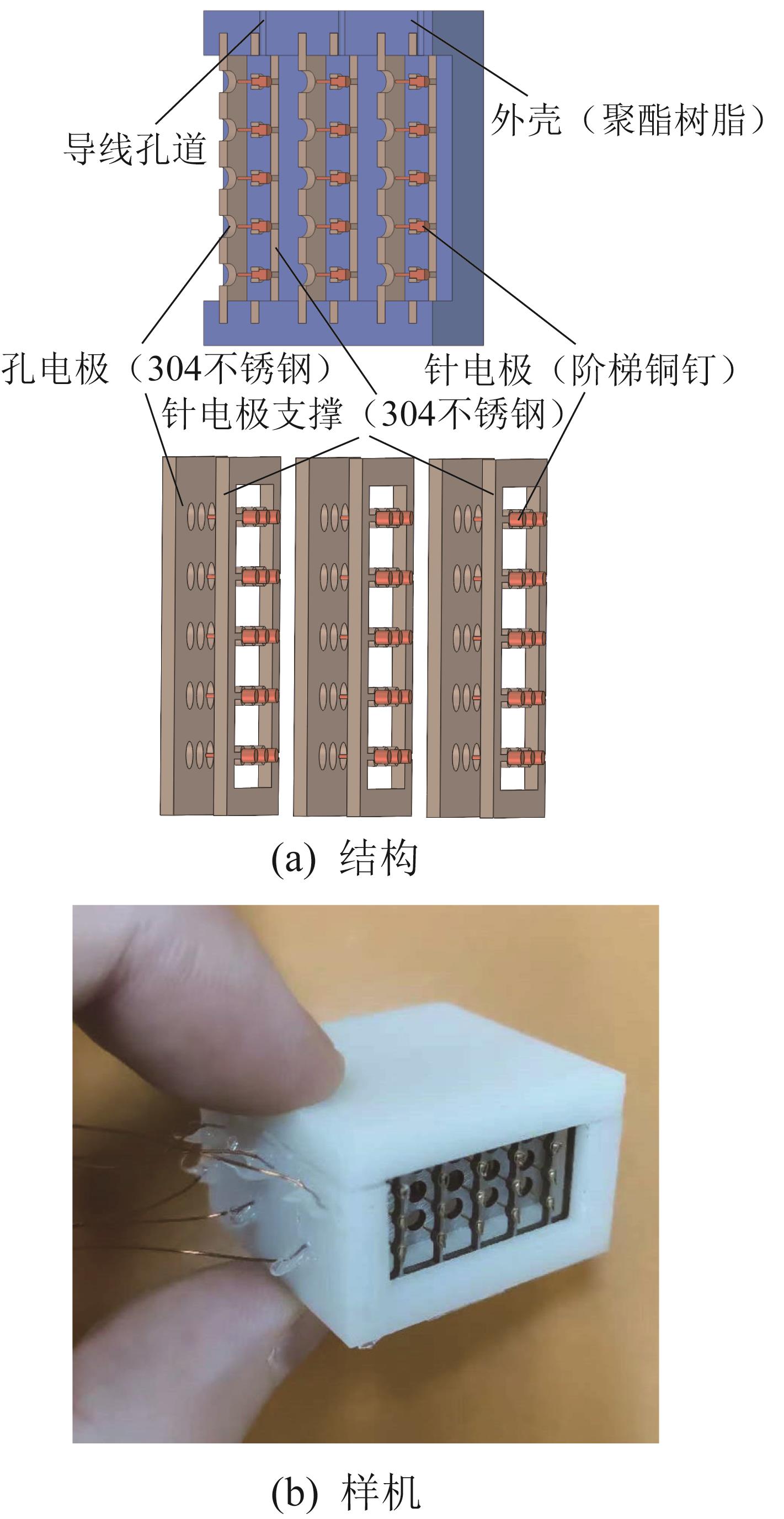
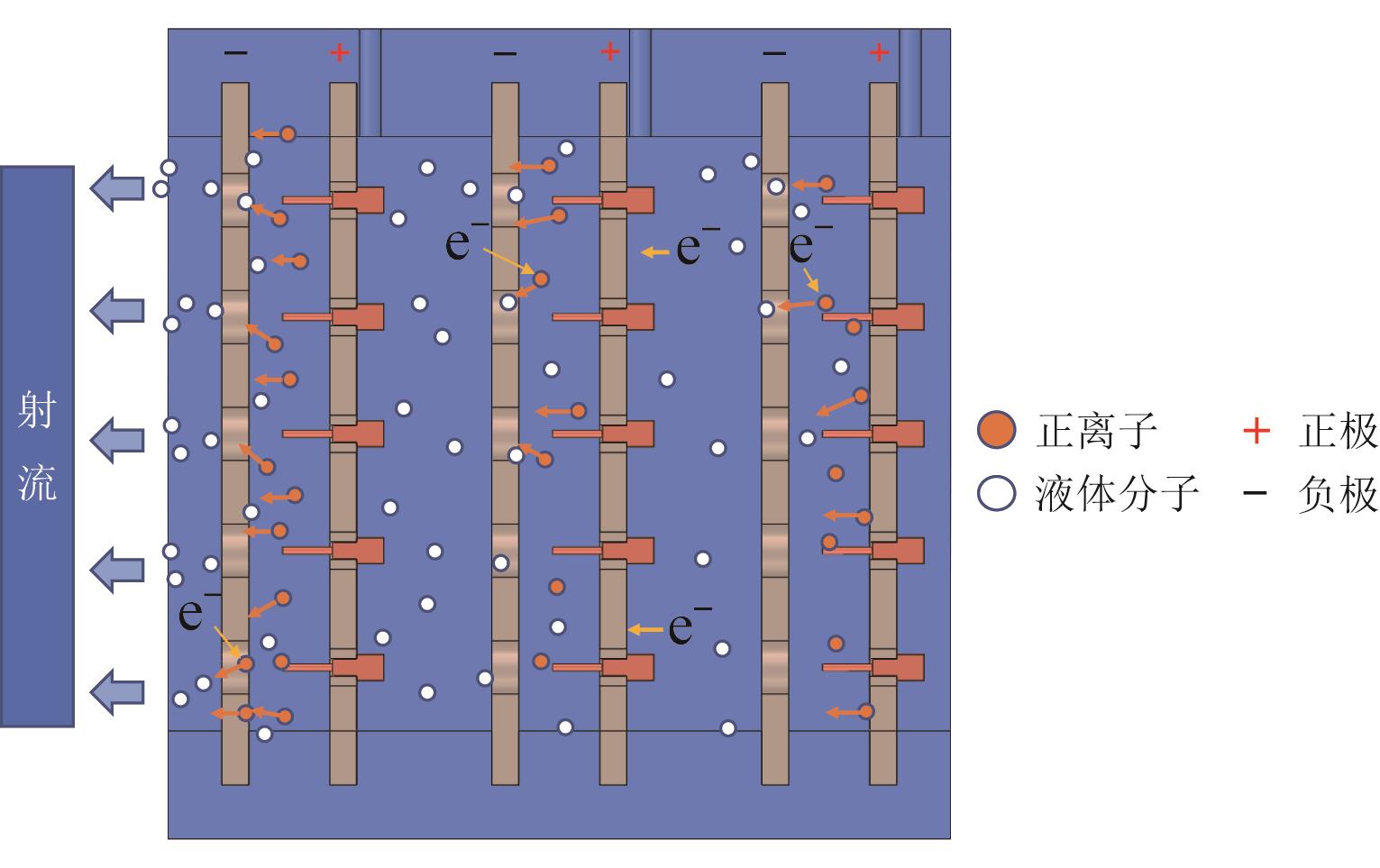
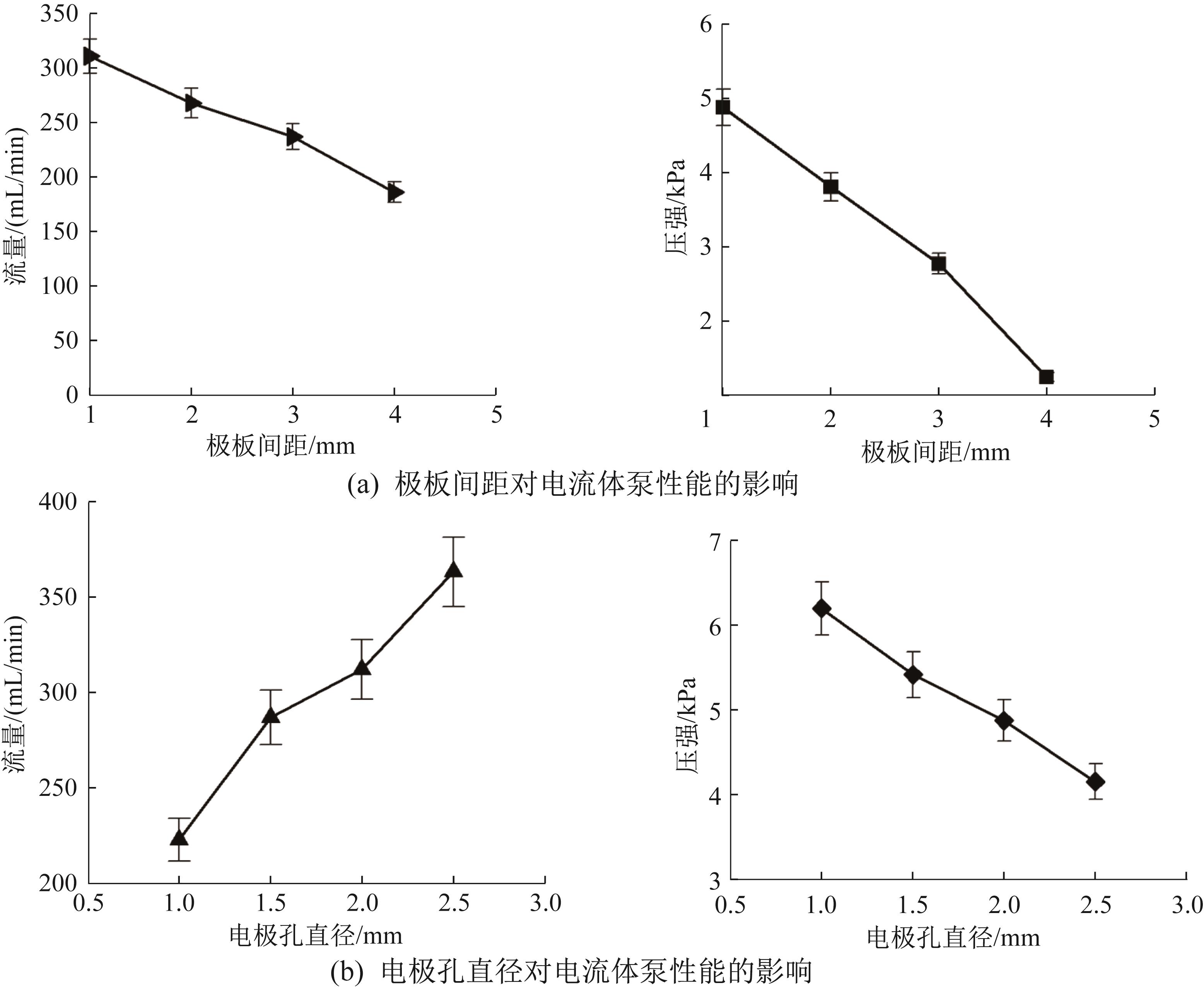
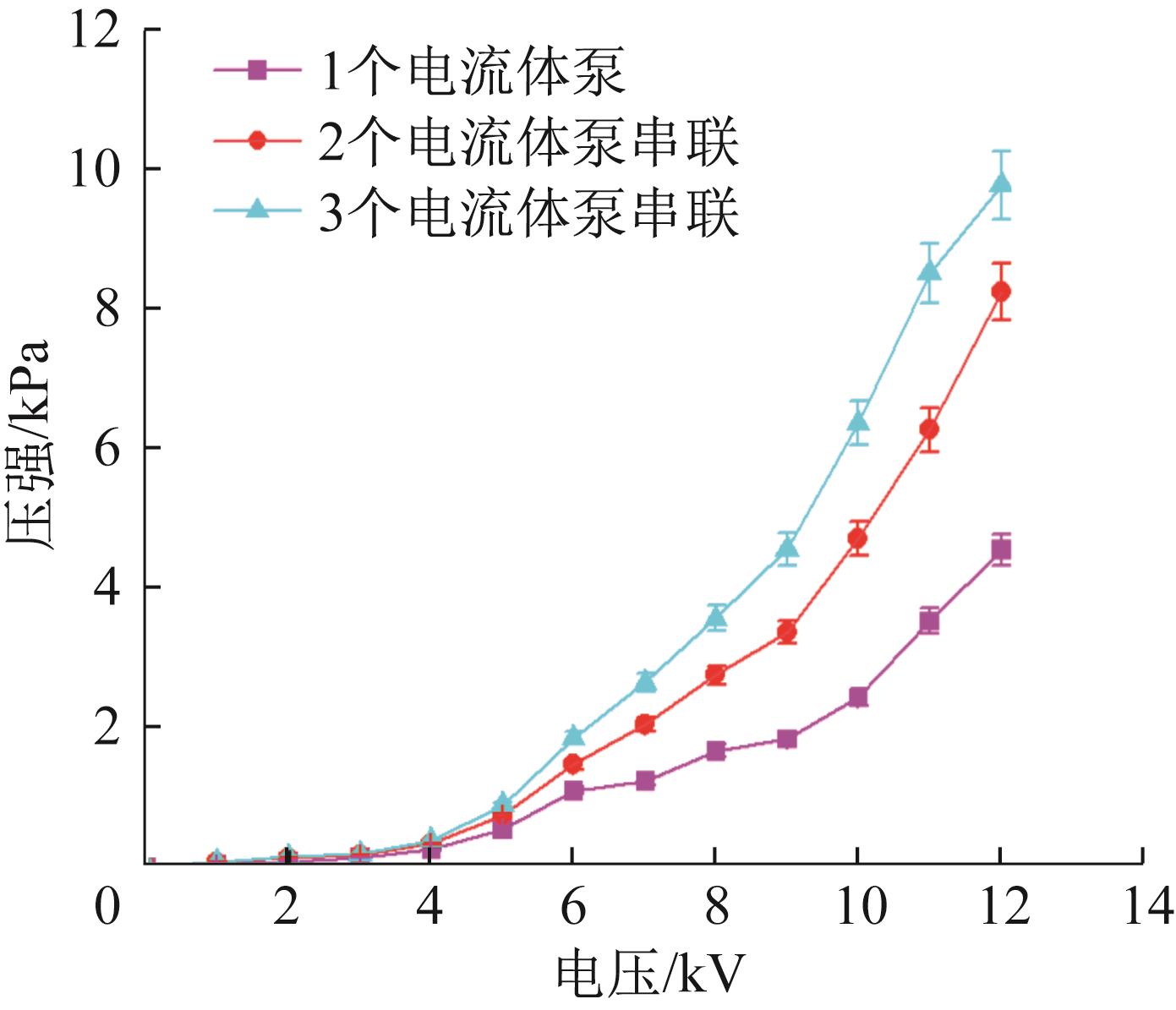
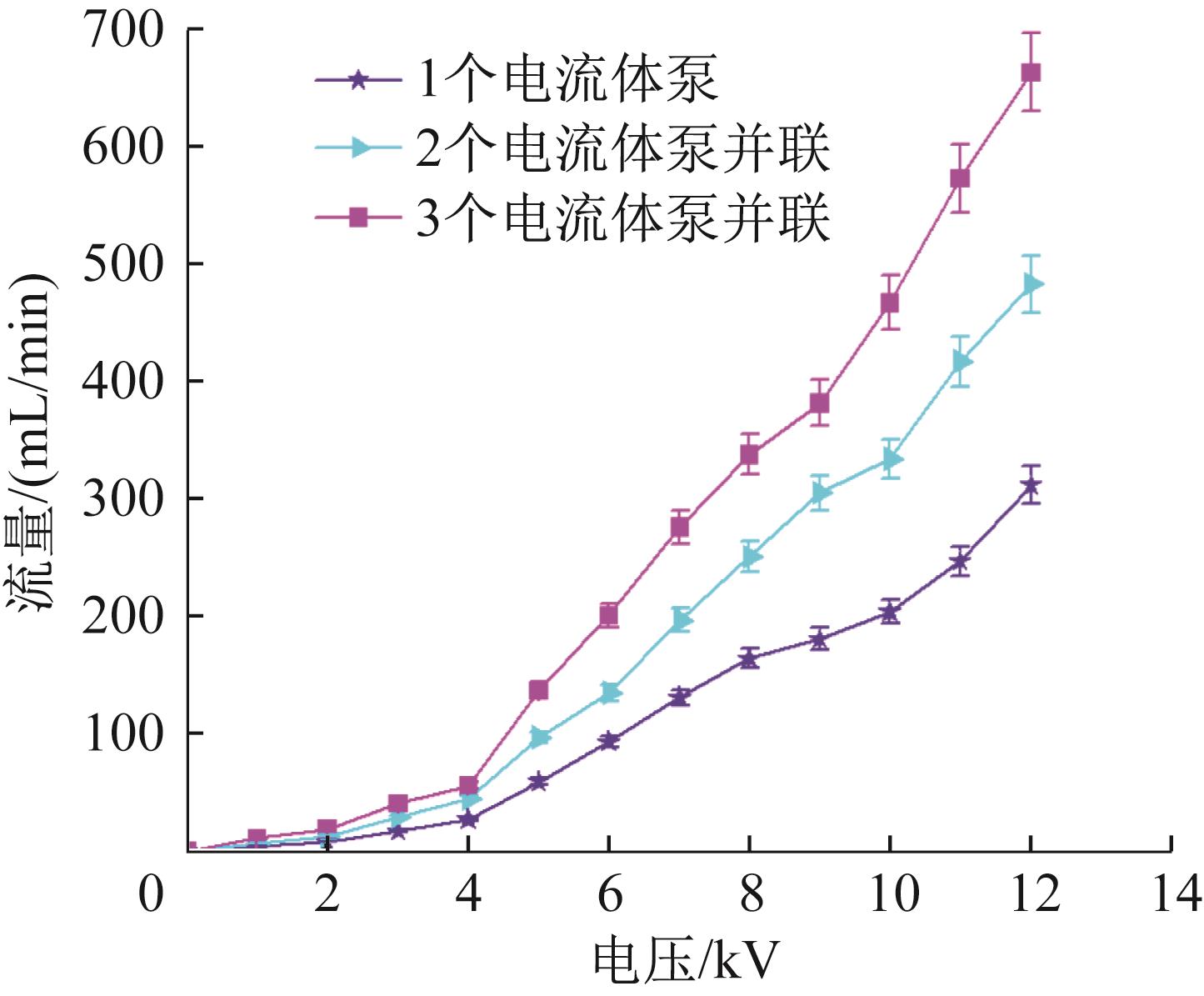
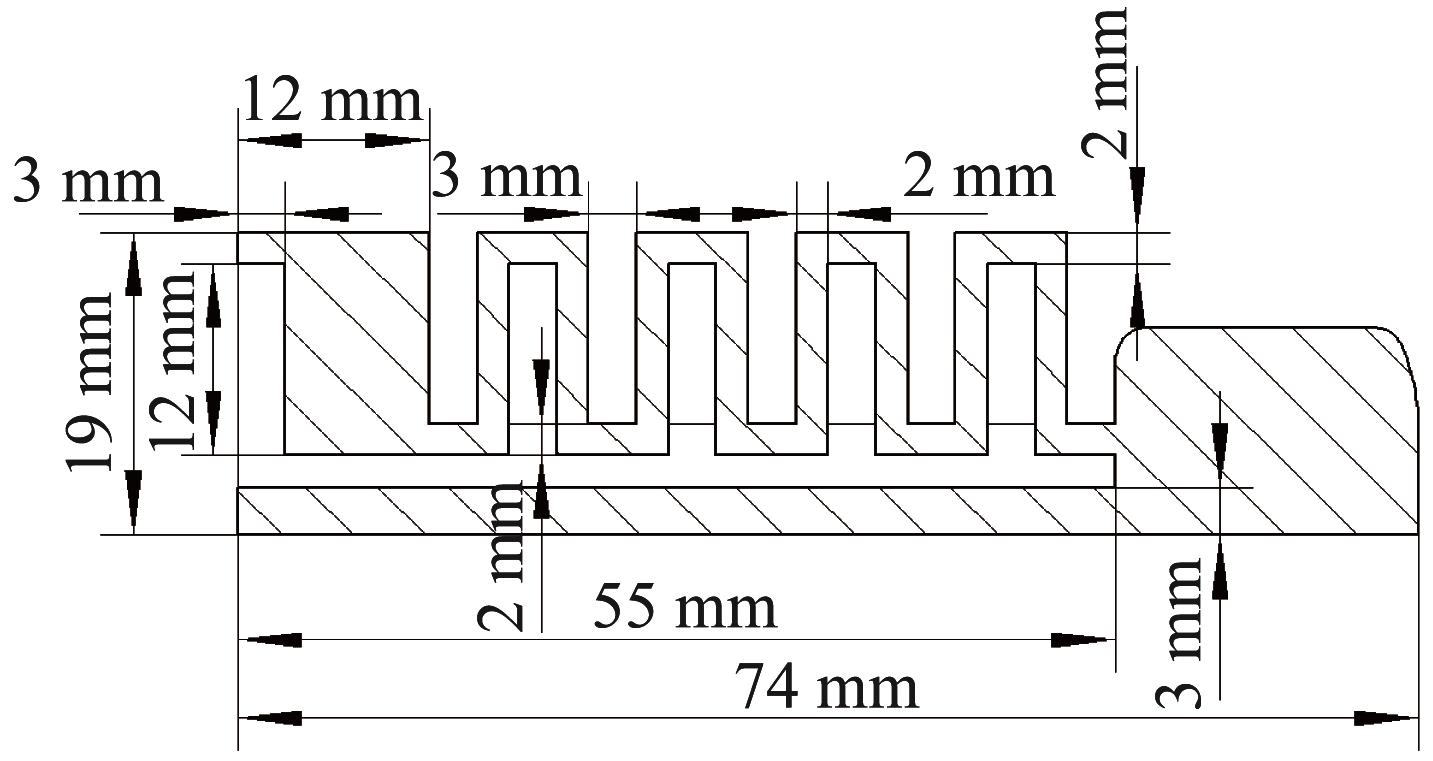
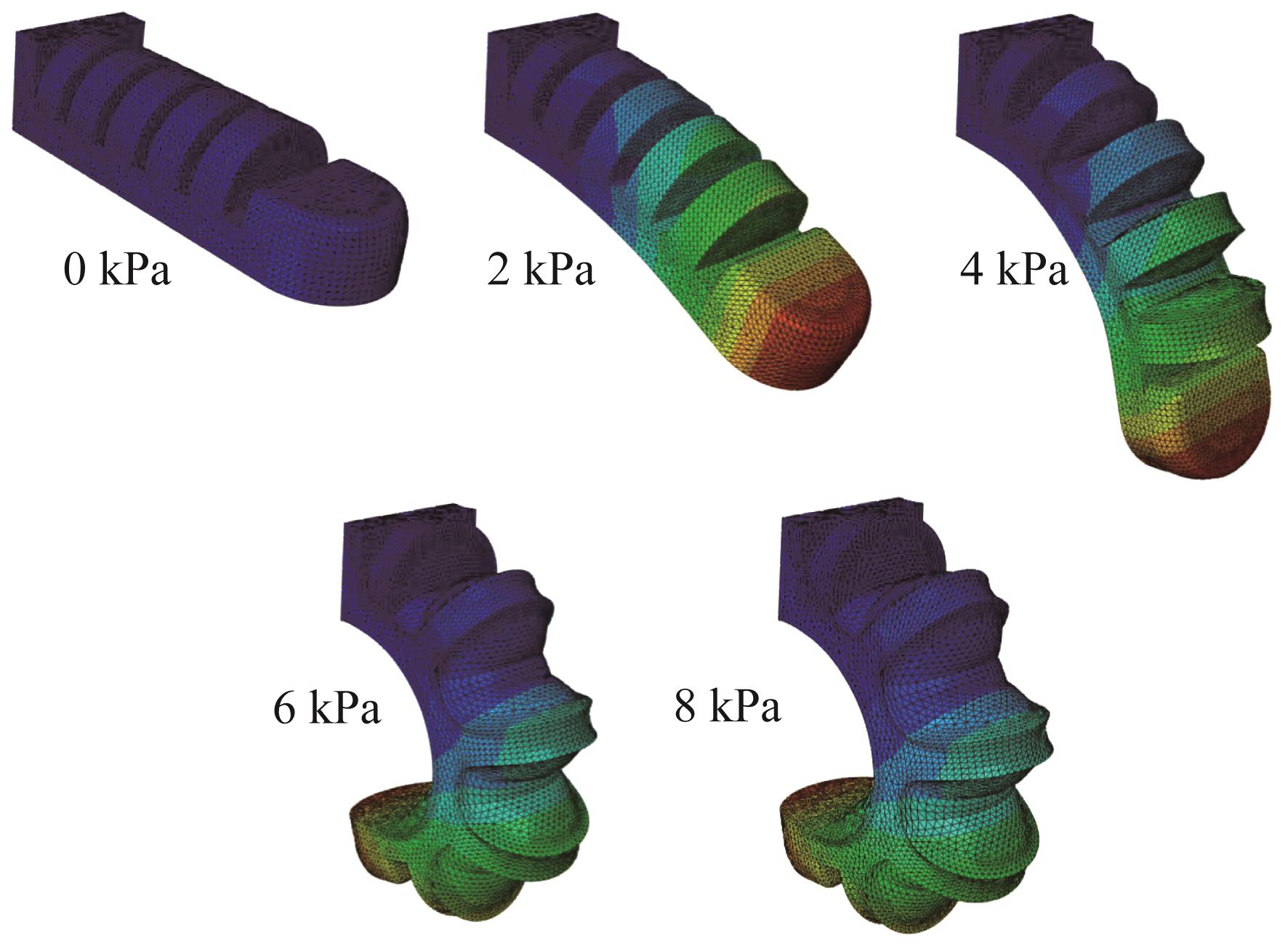
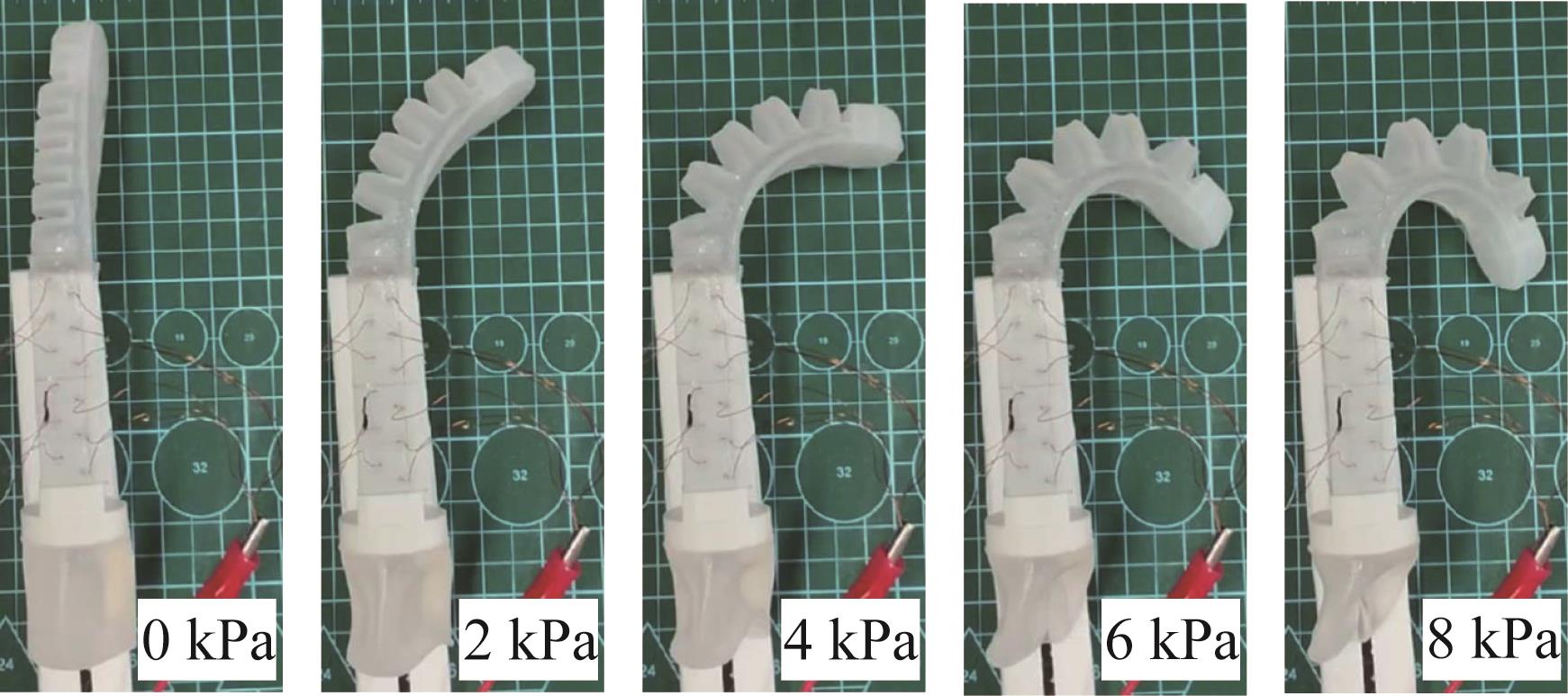
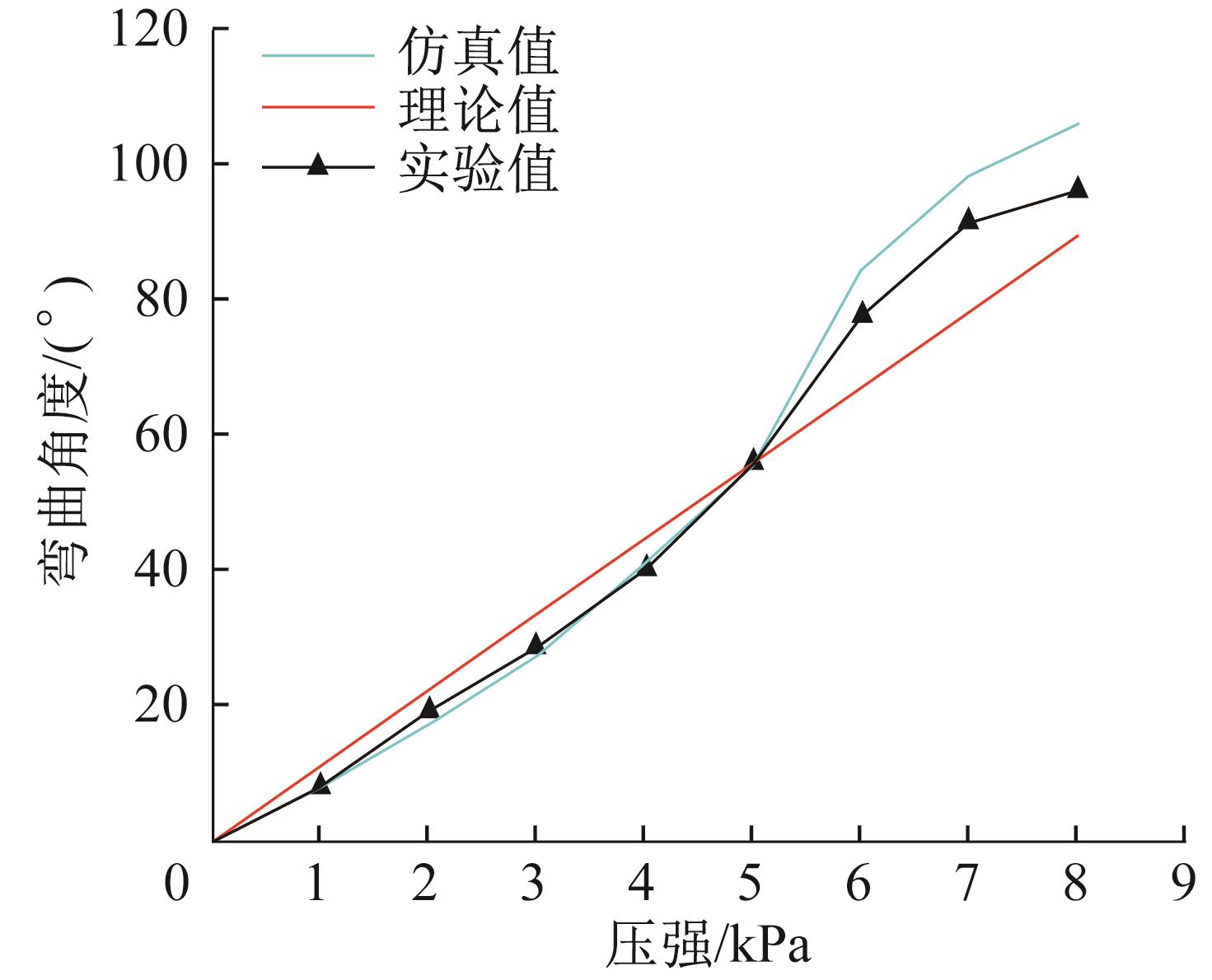
Abstract In response to solve the current issue of requiring external rigid body pump and valve for flexible actuator, a flexible bending actuator driven by an embedded electrohydrodynamic pump was designed based on the motion characteristics of human finger bending and grasping. A electrohydrodynamic pump was designed, and the influence of electrode plate spacing and electrode hole diameter on the output flow and pressure of the electrohydrodynamic pump were analyzed through experiments. The dimensions of the needle electrode, hole electrode and other components of electrohydrodynamic pump were determined, and a prototype of the electrohydrodynamic pump was developed. Multiple electrohydrodynamic pumps were connected in series and parallel, and the relationships between input voltage and output pressure, output flow were obtained. Two electrohydrodynamic pumps in series were determined to drive the flexible actuator; a mechanical model of the flexible actuator was established, and bending simulation and experiments were conducted on the flexible actuator. The relationship between the driving pressure and the bending angle of the flexible actuator was obtained, proving the good bending performance of the flexible actuator. The experimental, simulation, and theoretical values of the bending angle were relatively consistent, and the theoretical and simulation models could accurately describe the bending deformation of the flexible bending actuator. The high integration of the electrohydrodynamic pump and the flexible actuator allows the electrohydrodynamic pump to directly drive the bending deformation of the flexible actuator, achieving the portability of the flexible bending actuator.
|
|
Received: 23 May 2023
Published: 04 September 2023
|
|
|
|
Corresponding Authors:
Kaisong WANG,Wei TANG
E-mail: 2242770074@qq.com;6668978wks@163.com;weitang@zju.edu.cn
|
电流体泵驱动的柔性弯曲执行器的设计及分析
针对目前柔性执行器需要外置的刚体泵和阀的问题,基于人手指弯曲抓握的运动特点,设计了一款由内嵌电流体泵驱动的柔性弯曲执行器。设计了电流体泵,通过实验分析了电流体泵的极板间距和电极孔直径对电流体泵输出流量和压强的影响,确定了电流体泵针电极、孔电极等部件的尺寸,研制了电流体泵样机。将多个电流体泵串联及并联,分别得出了输入电压与输出流量、输出压强的关系,确定了以2个电流体泵串联的方式来驱动软体执行器;建立了柔性执行器的力学模型,对柔性执行器进行了弯曲仿真和实验,得到了驱动压强与柔性执行器弯曲角度之间的关系,证明了柔性执行器具有良好的弯曲性能。弯曲角度的实验值、仿真值、理论值较一致,理论模型和仿真模型可以较为准确地描述柔性弯曲执行器的弯曲变形。电流体泵与柔性执行器高度集成,使电流体泵可以直接驱动柔性执行器弯曲变形,实现了柔性弯曲执行器的可携带性。
关键词:
电流体泵,
柔性弯曲执行器,
电极对,
有限元分析
|
|
| [1] |
CIANCHETTI M, CALISTI M, MARGHERI L, et al. Bioinspired locomotion and grasping in water: The soft eight-arm OCTOPUS robot[J]. Bioinspiration and Biomimetics, 2015, 10(3): 035003. doi:10.1088/1748-3190/10/3/035003
doi: 10.1088/1748-3190/10/3/035003
|
|
|
| [2] |
DELLA S C, KATZSCHMANN R K, BICCHI A, et al. Hierarchical control of soft manipulators towards unstructured interactions[J]. The International Journal of Robotics Research, 2021, 40(1): 411-434. doi:10.1177/0278364920979367 .
doi: 10.1177/0278364920979367
|
|
|
| [3] |
TOLLEY M T, SHEPHERD R F, MOSADEGH B, et al. A resilient, untethered soft robot[J]. Soft Robotics, 2014, 1(3): 213-223. doi:10.1089/soro.2014.0008 .
doi: 10.1089/soro.2014.0008
|
|
|
| [4] |
徐丰羽,孟凡昌,范保杰,等.软体机器人驱动、建模与应用研究综述[J].南京邮电大学学报(自然科学版),2019,39(3):64-75. doi:10.14132/j.cnki.1673-5439.2019.03.010
XU F Y, MENG F C, FAN B J, et al. Review of driving methods, modeling and application in soft robots[J]. Journal of Nanjing University of Posts and Telecommunications (Natural Science), 2019, 39(3): 64-75.
doi: 10.14132/j.cnki.1673-5439.2019.03.010
|
|
|
| [5] |
李三平,孙腾佳,袁龙强,等.气动软体采摘机械手设计及实验研究[J].工程设计学报,2022,29(6):684-694. doi:10.3785/j.issn.1006-754X.2022.00.085
LI S P, SUN T J, YUAN L Q, et al. Design and experimental research of pneumatic soft picking manipulator[J]. Chinese Journal of Engineering Design,2022, 29(6): 684-694.
doi: 10.3785/j.issn.1006-754X.2022.00.085
|
|
|
| [6] |
鲍官军,张亚琪,许宗贵,等.软体机器人气压驱动结构研究综述[J].高技术通讯,2019,29(5):467-479. doi:10.3772/j.issn.1002-0470.2019.05.008
BAO G J, ZHANG Y Q, XU Z G. Review on pneumatic-driven structure for soft robot[J]. Chinese High Technology Letters, 2019, 29(5): 467-479.
doi: 10.3772/j.issn.1002-0470.2019.05.008
|
|
|
| [7] |
RUS D, TOLLEY M T. Design, fabrication and control of soft robots[J]. Nature, 2015, 521: 467-475. doi:10.1038/nature14543
doi: 10.1038/nature14543
|
|
|
| [8] |
BRIAN B K, HYUNGMIN C, HAEMIN L, et al. Exo-glove poly Ⅱ: A polymer-based soft wearable robot for the hand with a tendon-driven actuation system[J]. Soft Robotics, 2019, 6(2): 214-227. doi:10.1089/soro.2018.0006
doi: 10.1089/soro.2018.0006
|
|
|
| [9] |
LI S, WANG K W. Fluidic origami: A plant-inspired adaptive structure with shape morphing and stiffness tuning[J]. Smart Materials and Structures, 2015, 24(10): 105031. doi:10.1088/0964-1726/24/10/105031
doi: 10.1088/0964-1726/24/10/105031
|
|
|
| [10] |
SUTTER T M, DICKERSON M B, CREASY T S, et al. Rubber muscle actuation with pressurized CO2 from enzyme-catalyzed urea hydrolysis[J]. Smart Materials and Structures, 2013, 22(9): 094022. doi:10.1088/0964-1726/22/9/094022
doi: 10.1088/0964-1726/22/9/094022
|
|
|
| [11] |
JI Z Y, YAN C Y, YU B, et al. Multimaterials 3D printing for free assembly manufacturing of magnetic driving soft actuator[J]. Advanced Materials Interfaces, 2017, 4(22): 1700629. doi:10.1002/admi.201700629
doi: 10.1002/admi.201700629
|
|
|
| [12] |
YUAN J K, NERI W, ZAKRI C, et al. Shape memory nanocomposite fibers for untethered high-energy microengines[J]. Science, 2019, 365: 155-158. doi:10.1126/science.aaw3722
doi: 10.1126/science.aaw3722
|
|
|
| [13] |
JUN Y N, SHUICHI W, TOSHIYUKI S, et al. Design of a variable-stiffness robotic hand using pneumatic soft rubber actuators[J]. Smart Materials and Structures, 2011, 20(10): 105015. doi:10.1088/0964-1726/20/10/105015
doi: 10.1088/0964-1726/20/10/105015
|
|
|
| [14] |
XIE Z, DOMEL A G, AN N, et al. Octopus arm-inspired tapered soft actuators with suckers for improved grasping.[J]. Soft Robotics, 2020, 7(5): 639-648. doi:10.1089/soro.2019.0082
doi: 10.1089/soro.2019.0082
|
|
|
| [15] |
FARIS O, MUTHUSAMY R, RENDA F, et al. Proprioception and exteroception of a soft robotic finger using neuromorphic vision-based sensing[J]. Soft Robot, 2023: 467-481. doi:10.1089/soro.2022.0030
doi: 10.1089/soro.2022.0030
|
|
|
| [16] |
YANG Y, WEI Y, LI Y T, et al. Novel design and three-dimensional printing of variable stiffness robotic grippers[J]. Journal of Mechanisms and Robotics, 2016, 8(6): 061010. doi:10.1115/1.4033728
doi: 10.1115/1.4033728
|
|
|
| [17] |
KANO I. Development of an EHD micropump to generate oscillating flow at low frequencies (effect of waveform on the EHD pumping)[J]. IEEE Transactions on Industry Applications, 2012, 48(3): 864-871. doi:10.1109/TIA.2012.2191249
doi: 10.1109/TIA.2012.2191249
|
|
|
| [18] |
CACUCCIOLO V, SHINTAKE J, KUWAJIMA Y, et al. Stretchable pumps for soft machines[J]. Nature, 2019, 572: 516-519. doi:10.1038/s41586-019-1479-6
doi: 10.1038/s41586-019-1479-6
|
|
|
| [19] |
SMITH M, CACUCCIOLO V, SHEA H. Fiber pumps for wearable fluidic systems[J]. Science, 2023, 379: 1327-1332. doi:10.1126/science.ade8654
doi: 10.1126/science.ade8654
|
|
|
| [20] |
TANG W, ZHANG C, ZHONG Y D, et al. Customizing a self-healing soft pump for robot[J]. Nature Communications, 2021, 12(1): 2247. doi:10.1038/s41467-021-22391-x
doi: 10.1038/s41467-021-22391-x
|
|
|
| [21] |
李斯盟,李清泉,王宝华,等.针-环与针-网电极液体EHD泵静态驱动力的实验研究[J].高电压技术,2015,41(6): 2108-2115. doi:10.13336/j.1003-6520.hve.2015.06.046
LI S M, LI Q Q, WANG B H. Experimental study on the static thrust of liquid EHD pump with single needle-ring and needle-mesh electrodes[J]. High Voltage Engineering, 2015, 41(6): 2108-2115.
doi: 10.13336/j.1003-6520.hve.2015.06.046
|
|
|
| [22] |
HUANG W, XIAO J L, XU Z P. A variable structure pneumatic soft robot[J]. Scientific Reports, 2020, 10(1): 18778. doi:10.1038/s41598-020-75346-5
doi: 10.1038/s41598-020-75346-5
|
|
|
| [23] |
谢业平,李红军.常用硅胶材料软体气动夹爪夹持性能的仿真研究[J].浙江理工大学学报(自然科学版), 2021, 45(3):328-334. doi:10.3969/j.issn.1673-3851(n). 2021.03.006
XIE Y P, LI H J. The simulation of the clamping performance of soft pneumatic grippers made of common silicone materials[J]. Journal of Zhejiang Institute of Science and Technology, 2021, 45(3): 328-334.
doi: 10.3969/j.issn.1673-3851(n). 2021.03.006
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|