| Optimization Design |
|


|
|
|
| Mechanism parameter optimization and trajectory planning of traction lower limb rehabilitation robot |
Peng-cheng ZHANG1,2( ),Jian-ye NIU3(),Cheng-lei LIU1,2,Jing-ke SONG1,2,Li-peng WANG3,Jian-jun ZHANG1,2 ),Jian-ye NIU3(),Cheng-lei LIU1,2,Jing-ke SONG1,2,Li-peng WANG3,Jian-jun ZHANG1,2 |
1.School of Mechanical Engineering, Hebei University of Technology, Tianjin 300401, China
2.Hebei Provincial Key Laboratory of Robot Perception and Human-Machine Fusion, Tianjin 300401, China
3.Hebei Provincial Key Laboratory of Parallel Robots and Electromechanical Systems, Yanshan University, Qinhuangdao 066004, China |
|
|
|
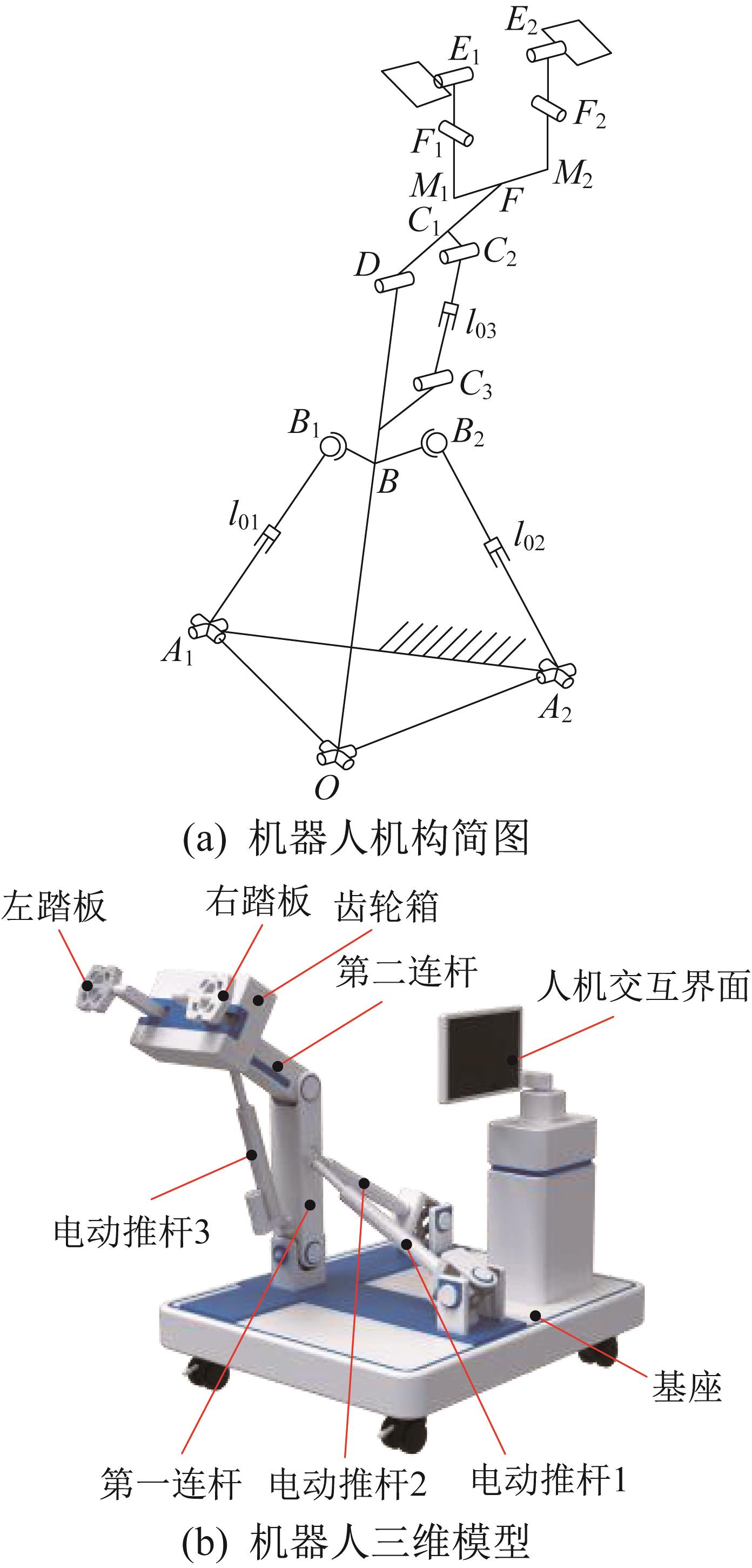
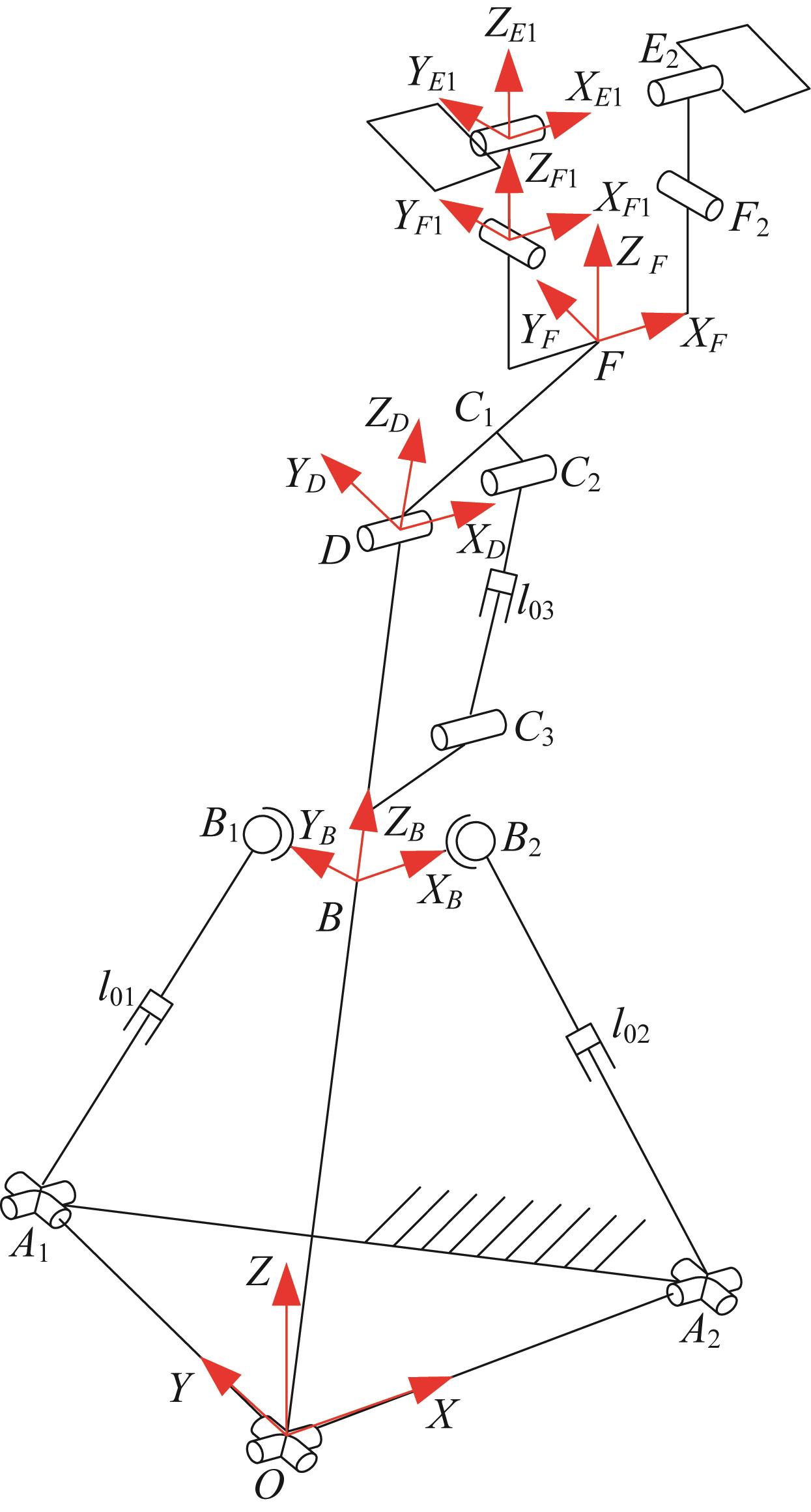
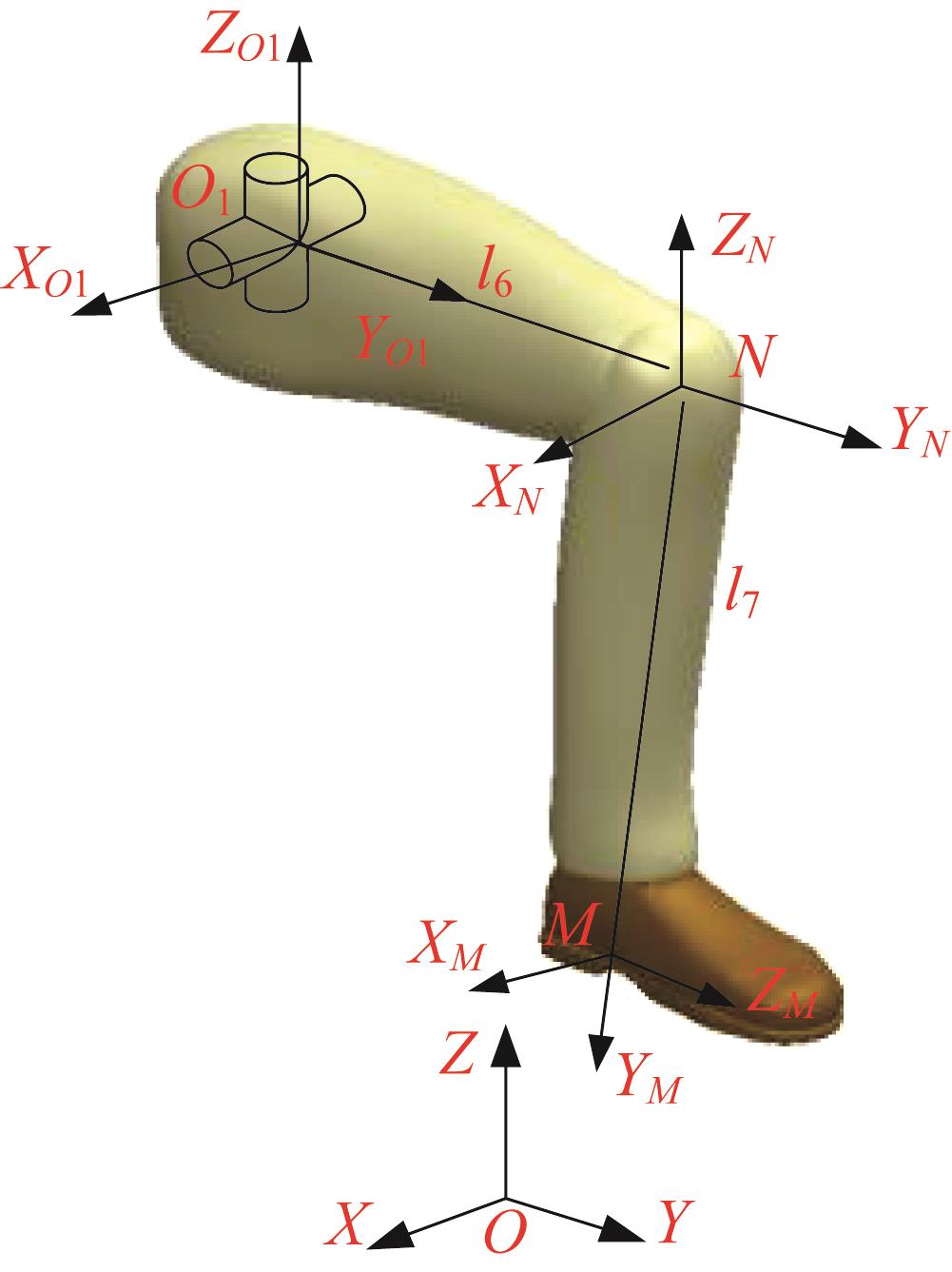
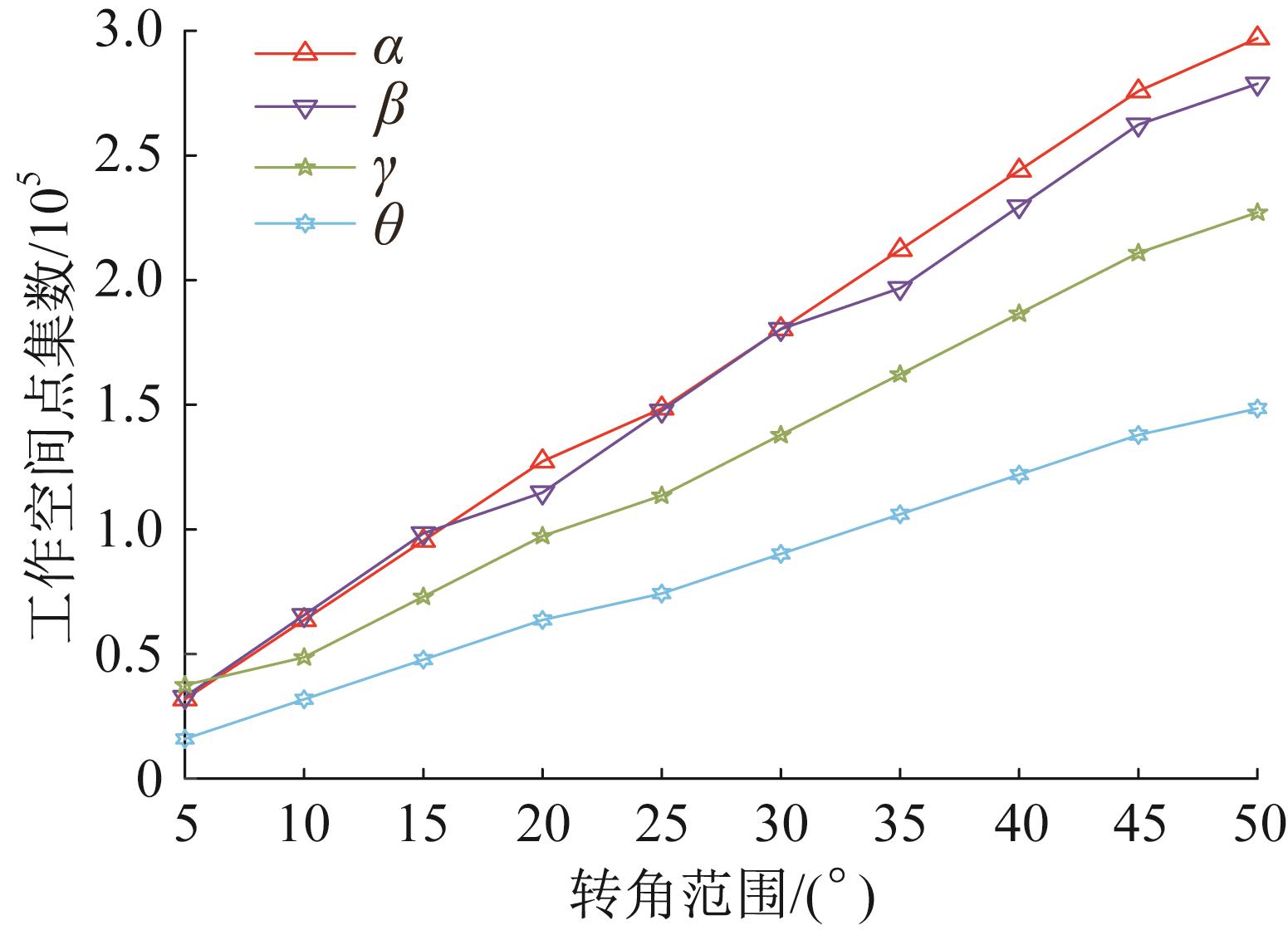
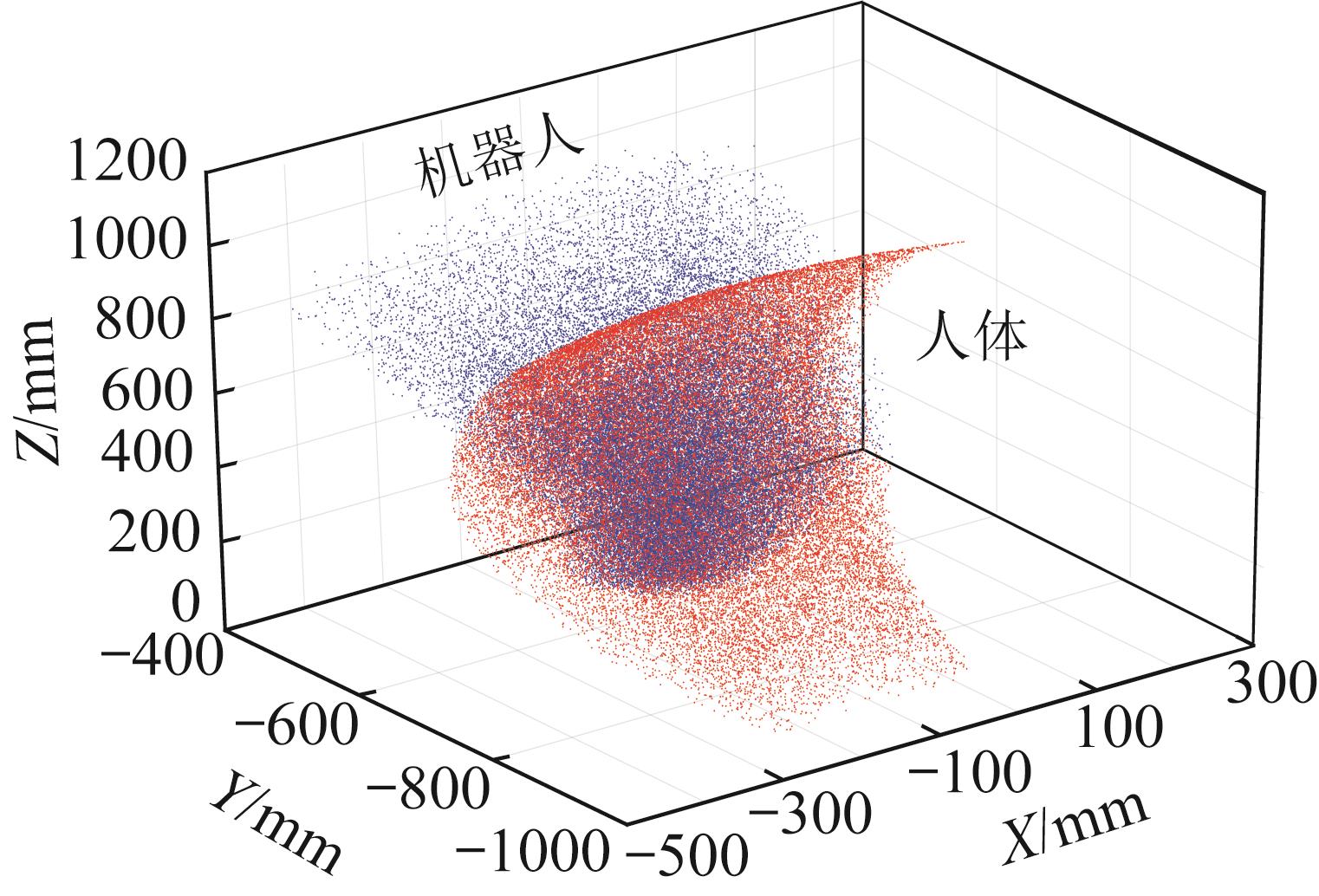
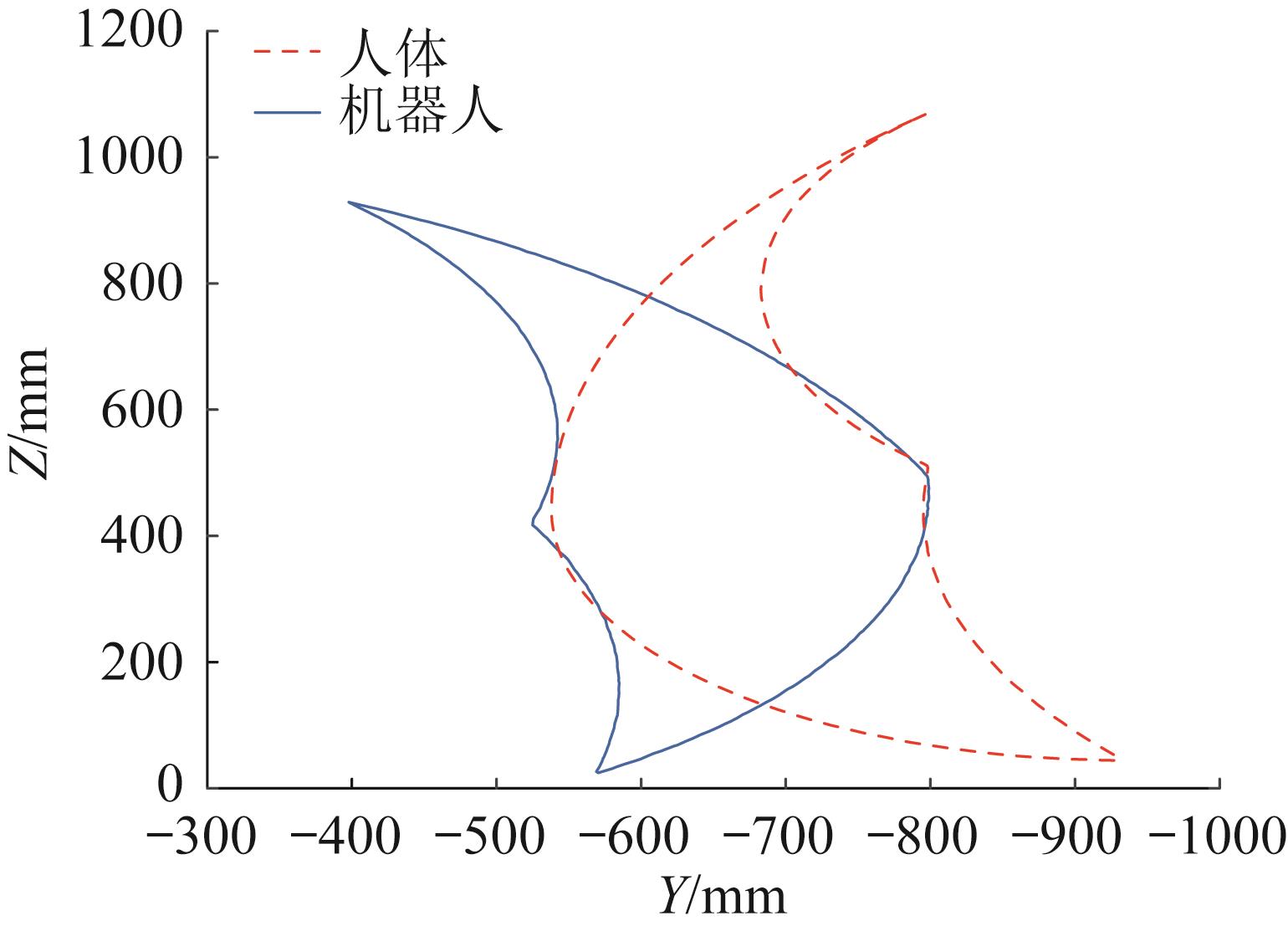
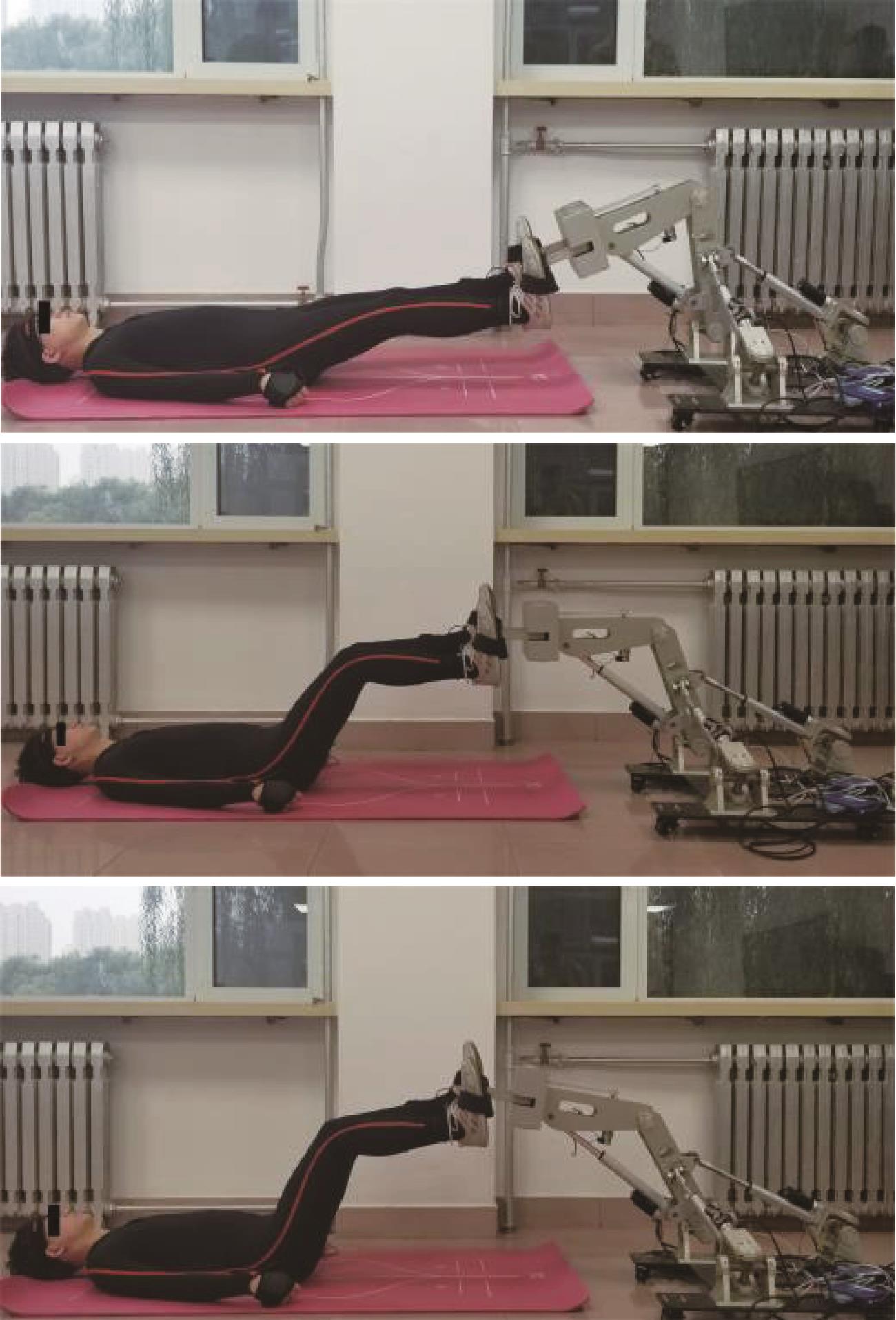
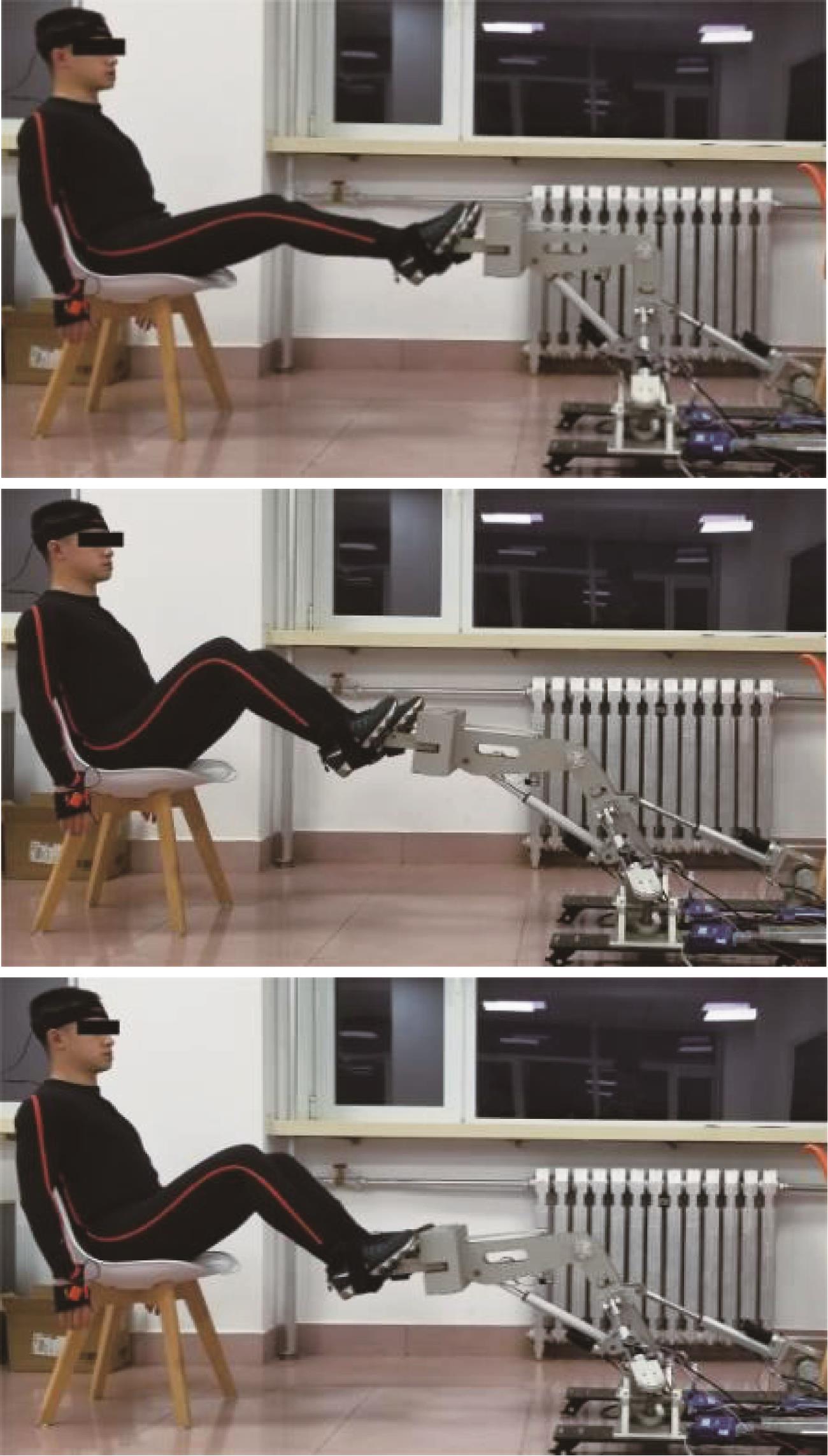
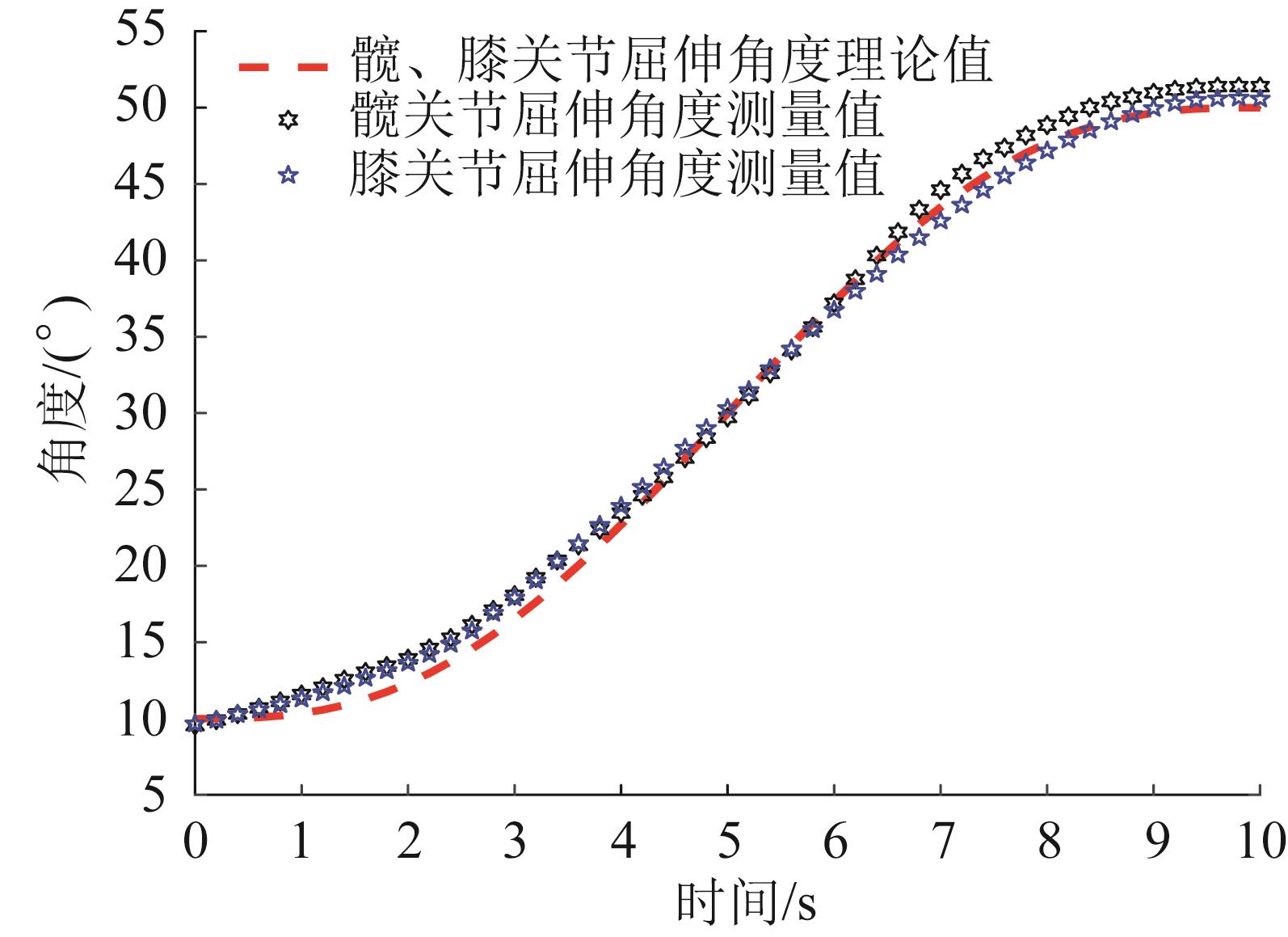
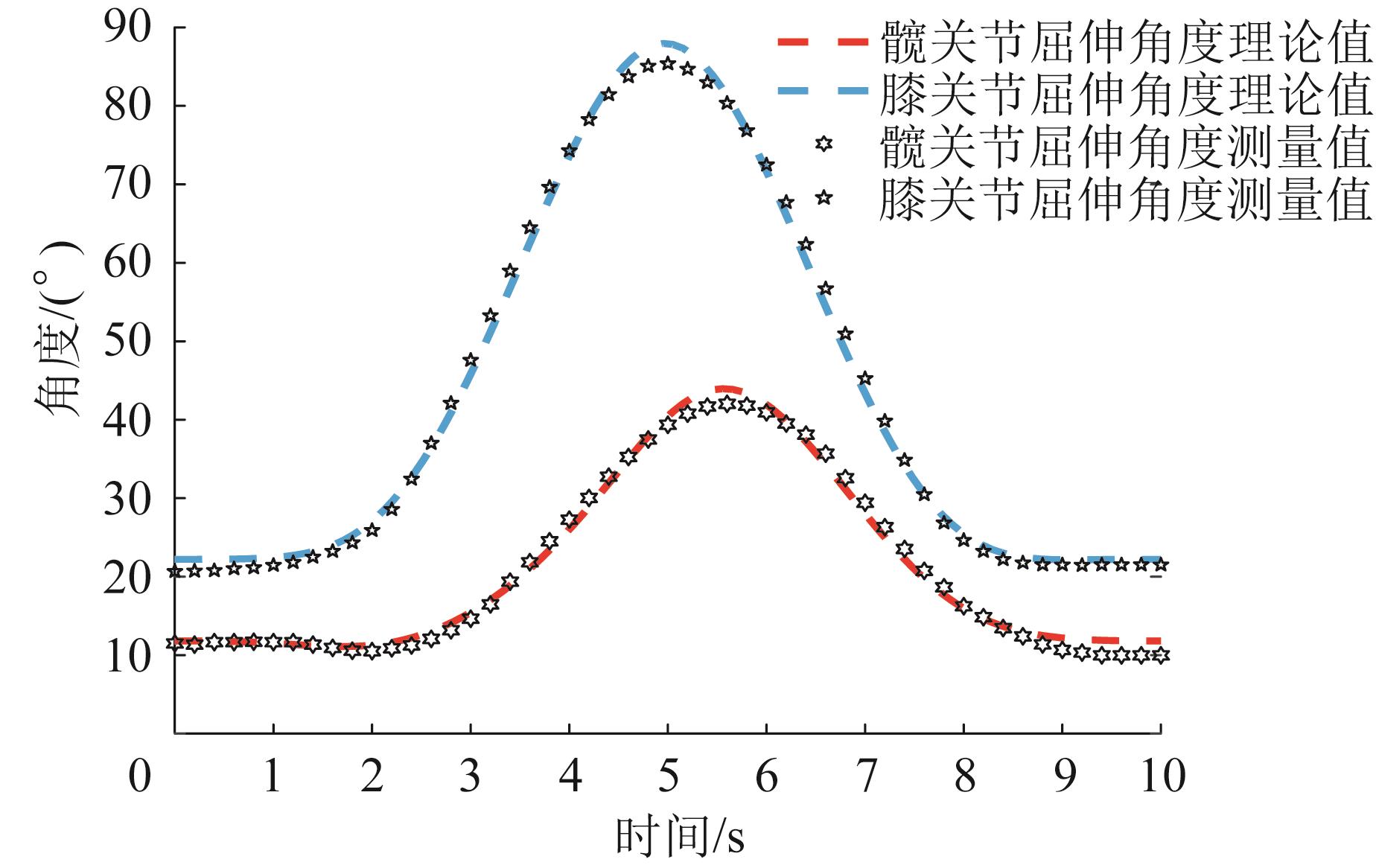
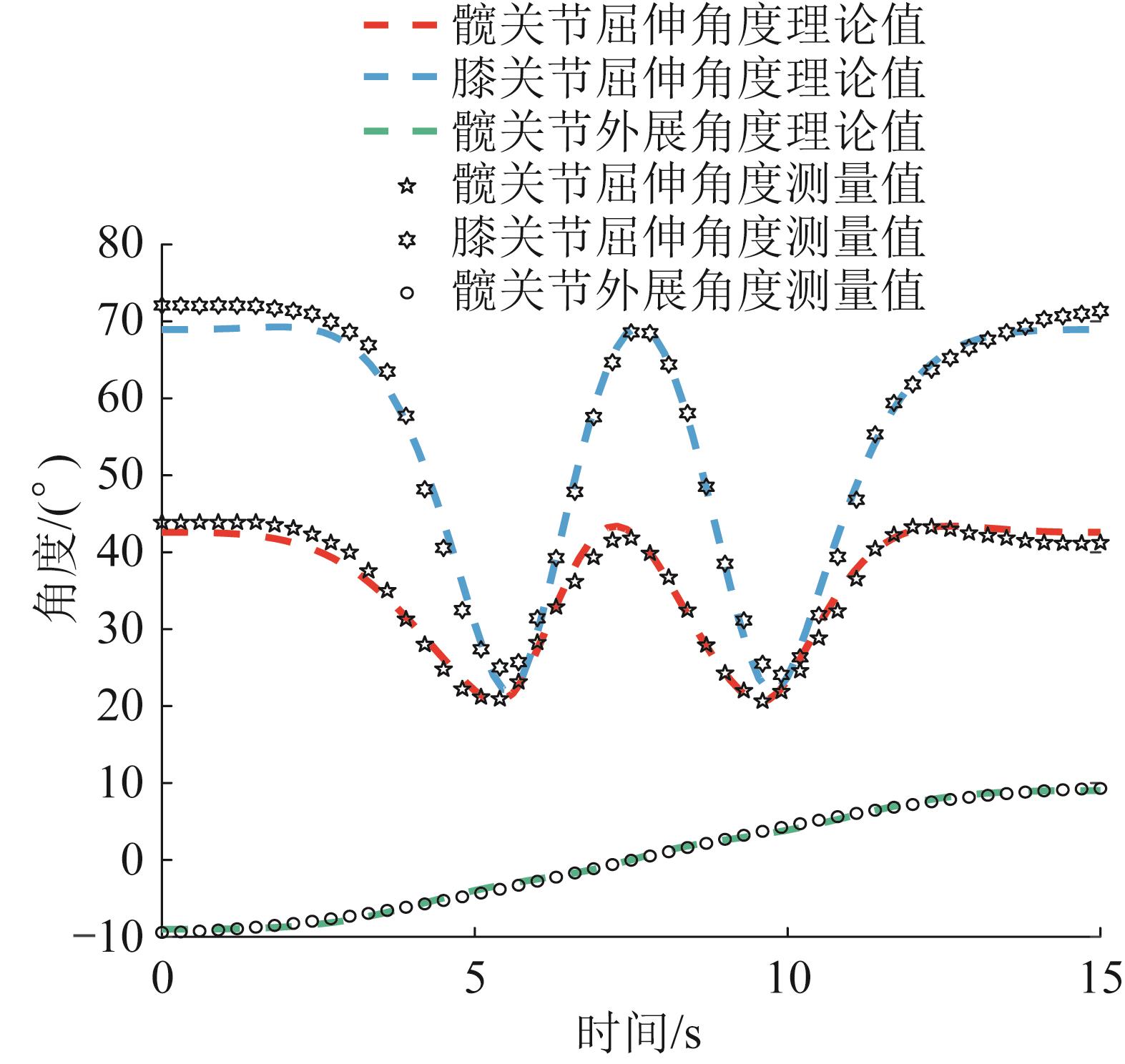
Abstract In order to meet the rehabilitation training needs of patients with lower limb motor dysfunction at different stages, a traction lower limb rehabilitation robot that could realize the training modes of lying and sitting postures was proposed in view of the single training mode of existing lower limb rehabilitation robots. Firstly, according to the motion mechanism and bionic principle of human lower limbs, a five-degree-of-freedom hybrid mechanism configuration was designed. Then, the kinematics model of the robot was established, and the forward and inverse kinematics solutions were calculated, respectively. Then, taking the workspace coincidence degree between the end of human lower limb and the end of robot as the objective function, the mechanism parameters of robot were optimized by the genetic algorithm, and the effective workspace ratio of human lower limb in the sagittal plane of the human-machine system was 0.71. Finally, three kinds of rehabilitation training trajectories including CPM (continuous passive motion), circular motion and spiral motion were planned, and a robot prototype was built according to the optimized mechanism parameters. Through motion capture experiments, the rationality of the robot structure design and optimization results and the correctness of trajectory planning were verified, which indicated that the robot could meet the rehabilitation needs of patients with lower limb motor dysfunction.
|
|
Received: 17 January 2022
Published: 06 January 2023
|
|
|
|
Corresponding Authors:
Jian-ye NIU
E-mail: pengchengz1021@163.com;jyniu@ysu.edu.cn
|
牵引式下肢康复机器人机构参数优化及轨迹规划
为满足下肢运动功能障碍患者在不同阶段的康复训练需求,针对现有下肢康复机器人训练方式单一的问题,提出了一种可实现卧姿、坐姿训练模式的牵引式下肢康复机器人。首先,根据人体下肢运动机理和仿生原理,设计了一种五自由度混联机构构型。然后,建立了机器人的运动学模型,分别计算了其运动学正、逆解。接着,以人体下肢末端与机器人末端的工作空间重合度为目标函数,采用遗传算法对机器人的机构参数进行了优化,并求得人机系统矢状面内人体下肢的有效工作空间比为0.71。最后,规划了CPM(continuous passive motion,连续被动运动)、圆周运动和螺旋运动等3种康复训练运动轨迹,并根据优化后的机构参数搭建了机器人样机,通过运动捕捉实验验证了机器人结构设计与优化结果的合理性以及轨迹规划的正确性,表明该机器人能够满足下肢运动功能障碍患者的康复需求。
关键词:
下肢康复机器人,
运动学分析,
参数优化,
轨迹规划
|
|
| [1] |
邹波.中国老龄化的现状与积极应对[J].中国民政,2017(20):42-44. doi:10.3969/j.issn.1002-4441.2017.20.019
ZOU Bo. The status quo of aging in China and its active response[J]. China Civil Affairs, 2017(20): 42-44.
doi: 10.3969/j.issn.1002-4441.2017.20.019
|
|
|
| [2] |
TABEA A S, ANJA G, ROB L. Correction to: the FreeD module for the Lokomat facilitates a physiological movement pattern in healthy people: a proof of concept study[J]. Journal of Neuroengineering & Rehabilitation, 2019, 16(1): 1-13.
|
|
|
| [3] |
饶玲军,谢叻,朱小标.下肢外骨骼行走康复机器人研究与设计[J].机械设计与研究,2012,28(3):24-26. doi:10.3969/j.issn.1006-2343.2012.03.008
RAO Ling-jun, XIE Le, ZHU Xiao-biao. Research and design of lower limb exoskeleton walking rehabilitation robot[J]. Mechanical Design and Research, 2012, 28(3): 24-26.
doi: 10.3969/j.issn.1006-2343.2012.03.008
|
|
|
| [4] |
AGGOGERI F, PELLEGRINI N, ADAMINI R. Functional design in rehabilitation: modular mechanisms for ankle complex[J]. Applied Bionics and Biomechanics, 2016, 2016: 9707801.
|
|
|
| [5] |
CUDBY K. Liberty autonomy independence[J]. Engineering Insight, 2011, 12(1): 8-14.
|
|
|
| [6] |
CHEN B, ZHONG C H, ZHAO X, et al. A wearable exoskeleton suit for motion assistance to paralysed patients[J]. Journal of Orthopaedic Translation, 2017, 11(3): 7-18.
|
|
|
| [7] |
BOURI M, LE GALL B, CLAVEL R. A new concept of parallel robot for rehabilitation and fitness: the Lambda[C]//Proceedings of the 2009 International Conference on Robotics and Biomimetics. Guilin, Dec. 19-23, 2009.
|
|
|
| [8] |
MONACO V, GALARDI G, COSCIA M, et al. Design and evaluation of NEUROBike: a neurorehabilitative platform for bedridden post-stroke patients[J]. IEEE Transactions on Neural System and Rehablitation Engineering, 2012, 20(6): 845-852.
|
|
|
| [9] |
牛建业.基于串并混联机构的四轮足步行机器人研究[D].秦皇岛:燕山大学,2018:21-23.
NIU Jian-ye. Research on wheel-legged quadruped walking robot based on series-parallel mechanism[D]. Qinhuangdao: Yanshan University, 2018: 21-23.
|
|
|
| [10] |
韦燕芬,陈敏茹,邓敏.髋关节置换术后康复初期患者的躯体活动功能及其影响因素研究[J].护理管理杂志,2018,18(8):567-571. doi:10.3969/j.issn.1671-315x.2018.08.008
WEI Yan-fen, CHEN Min-ru, DENG Min. Analysis of physical function status and influencing factors in patients with hip joint replacement at early rehabilitation[J]. Journal of Nursing Administration, 2018, 18(8): 567-571.
doi: 10.3969/j.issn.1671-315x.2018.08.008
|
|
|
| [11] |
夏鹏鹏,韩建海,李辽远,等.三维空间末端牵引上肢康复机器人轨迹规划研究[J].中国康复医学杂志,2021,36(11):1414-1419. doi:10.3969/j.issn.1001-1242.2021.11.015
XIA Peng-peng, HAN Jian-hai, LI Liao-yuan, et al. A study on trajectory planning of an upper limb rehabilitation robot with distal traction in three-dimensional space[J]. Chinese Journal of Rehabilitation Medicine, 2021, 36(11): 1414-1419.
doi: 10.3969/j.issn.1001-1242.2021.11.015
|
|
|
| [12] |
雷英杰,张善文.MATLAB遗传算法工具箱及应用[M].西安:西安电子科技大学出版社,2014:147-155.
LEI Ying-jie, ZHANG Shan-wen. MATLAB genetic algorithm toolbox and application[M]. Xi’an: Xidian University Press, 2014: 147-155.
|
|
|
| [13] |
国家技术监督局. 中国成年人人体尺寸国家标准: [S].北京:中国标准出版社,1988: 6-8.
National Technical Supervision Bureau. Human dimensions of Chinese adults: [S]. Beijing: China Standard Press, 1988: 6-8.
|
|
|
| [14] |
莫贤,陈文家,陈淑艳.一种3-PRS并联机器人的姿态空间分析[J].扬州大学学报(自然科学版),2009,12(3):57-61.
MO Xian, CHEN Wen-jia, CHEN Shu-yan. Analysis on working space of a 3-PRS parallel manipulator[J]. Journal of Yangzhou University (Natural Science Edition), 2009, 12(3): 57-61.
|
|
|
| [15] |
李猛,侯红娟,崔国华.一种双机协同作业机器人的协作工作空间分析[J].科学技术与工程,2020,20(31):12802-12807. doi:10.3969/j.issn.1671-1815.2020.31.018
LI Meng, HOU Hong-juan, CUI Guo-hua. A analysis of collaborative workspace two-arm collaborative grinding robot[J]. Science Technology and Engineering, 2020, 20(31): 12802-12807.
doi: 10.3969/j.issn.1671-1815.2020.31.018
|
|
|
| [16] |
郭冰菁,韩建海,李向攀,等.理疗师交互下的下肢康复训练机器人个性化步态规划方法[J].机器人,2018,40(4):479-490,499. doi:10.13973/j.cnki.robot.180139
GUO Bing-jing, HAN Jian-hai, LI Xiang-pan, et al. Personalized gait planning method for the lower-limb rehabilitation training robot with the physiotherapist interaction[J]. Robot, 2018, 40(4): 479-490, 499.
doi: 10.13973/j.cnki.robot.180139
|
|
|
| [17] |
陈佳丽,许勇,刘文彩.线性驱动并联机构基于有效工作空间比的尺度优化[J].机械设计与研究,2019,35(1):42-46,52.
CHEN Jia-li, XU Yong, LIU Wen-cai. Geometric solution and scale optimization of parallel mechanism workspace[J]. Mechine Design and Research, 2019, 35(1): 42-46, 52.
|
|
|
| [18] |
GUO B, HAN J, LI X, et al. Research and design of a new horizontal lower limb rehabilitation training robot[J]. International Journal of Advanced Robotic Systems, 2016, 13(1): 1-10.
|
|
|
| [19] |
黄高,张伟民, MARCO Ceccarelli,等.一种新的康复与代步外骨骼机器人研究[J].自动化学报,2016,42(12):1933-1942.
HUANG Gao, ZHANG Wei-min, MARCO Ceccarelli, et al. Research of a new rehabilitation and assisting robot[J]. Journal of Automation, 2016, 42(12): 1933-1942.
|
|
|
| [20] |
靳振楠.空间四自由度下肢康复机器人设计与分析[D].秦皇岛:燕山大学,2019:42-43.
JIN Zhen-nan. Design and analysis of spatial four-degree-of freedom lower limb rehabilitation robot[D]. Qinhuangdao: Yanshan University, 2019: 42-43.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|