| Design Theory and Method |
|


|
|
|
| Ackerman steering trajectory planning and position estimation of 4WID-4WIS intelligent vehicle |
Pei-cheng SHI1( ),Xu CHEN1,Ai-xi YANG2,Liang ZHANG1 ),Xu CHEN1,Ai-xi YANG2,Liang ZHANG1 |
1.Anhui Engineering Technology Research Center of Automotive New Technology,Anhui Polytechnic University,Wuhu 241000,China
2.Polytechnic Institute,Zhejiang University,Hangzhou 310000,China |
|
|
|
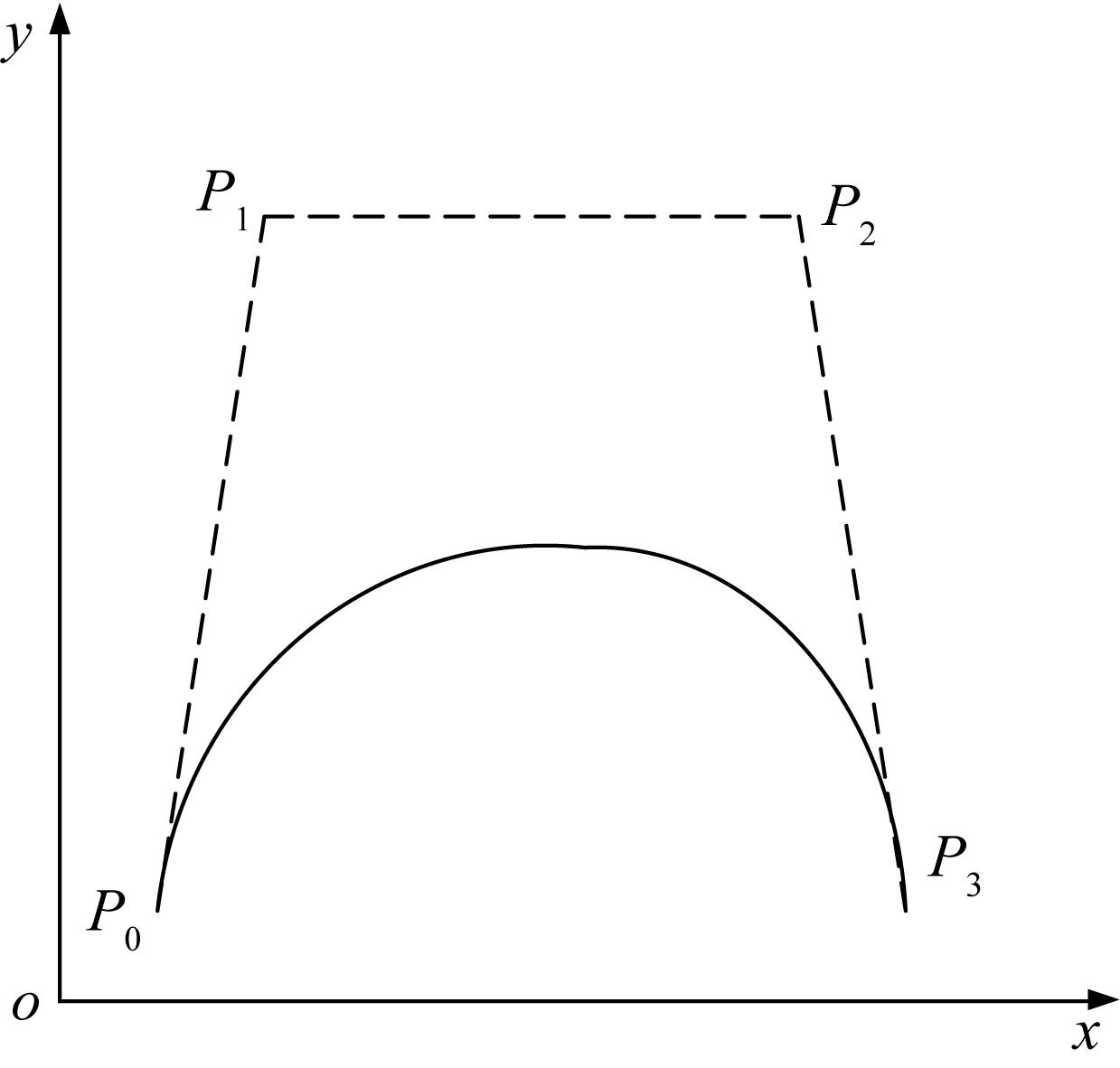
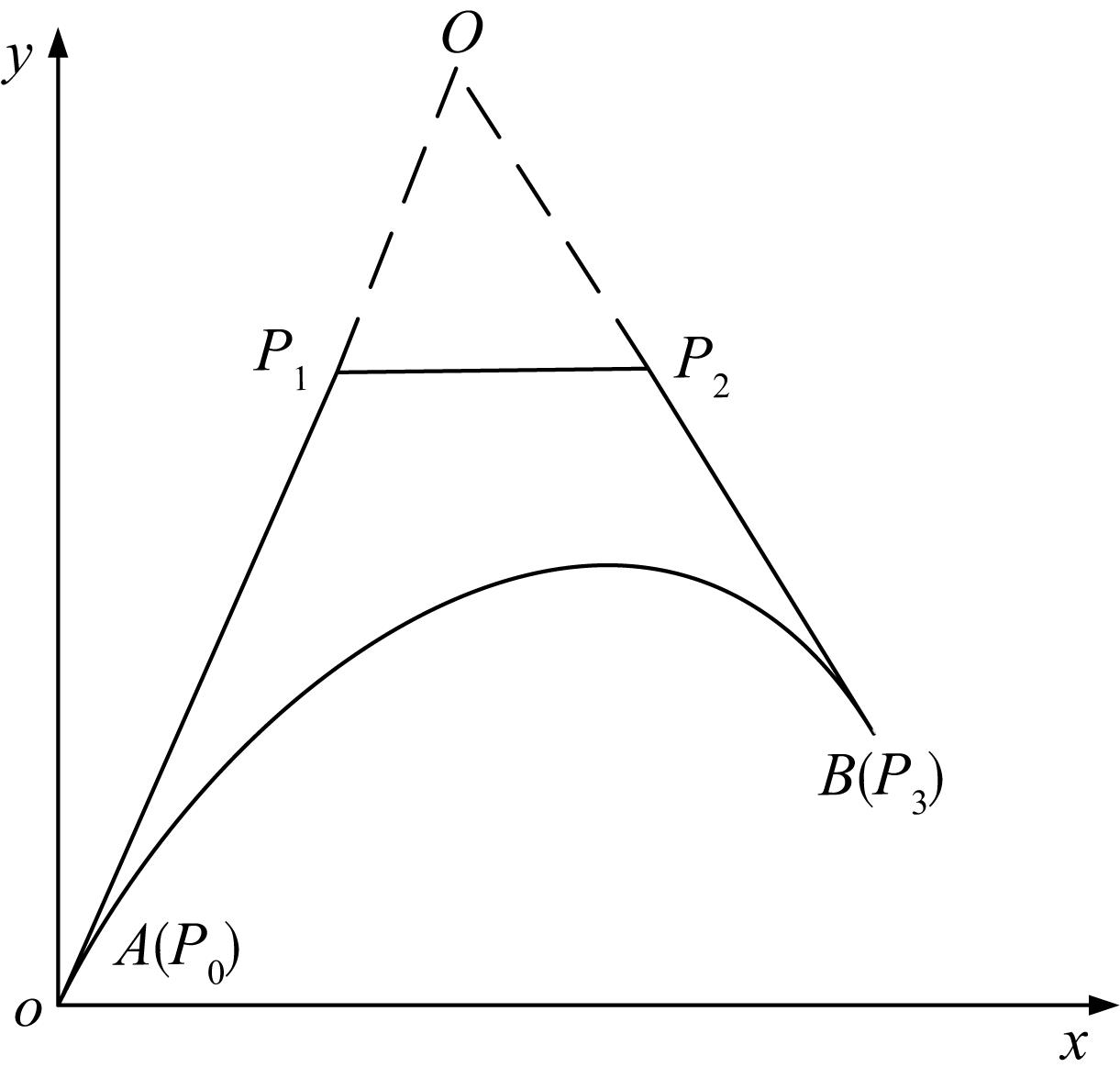
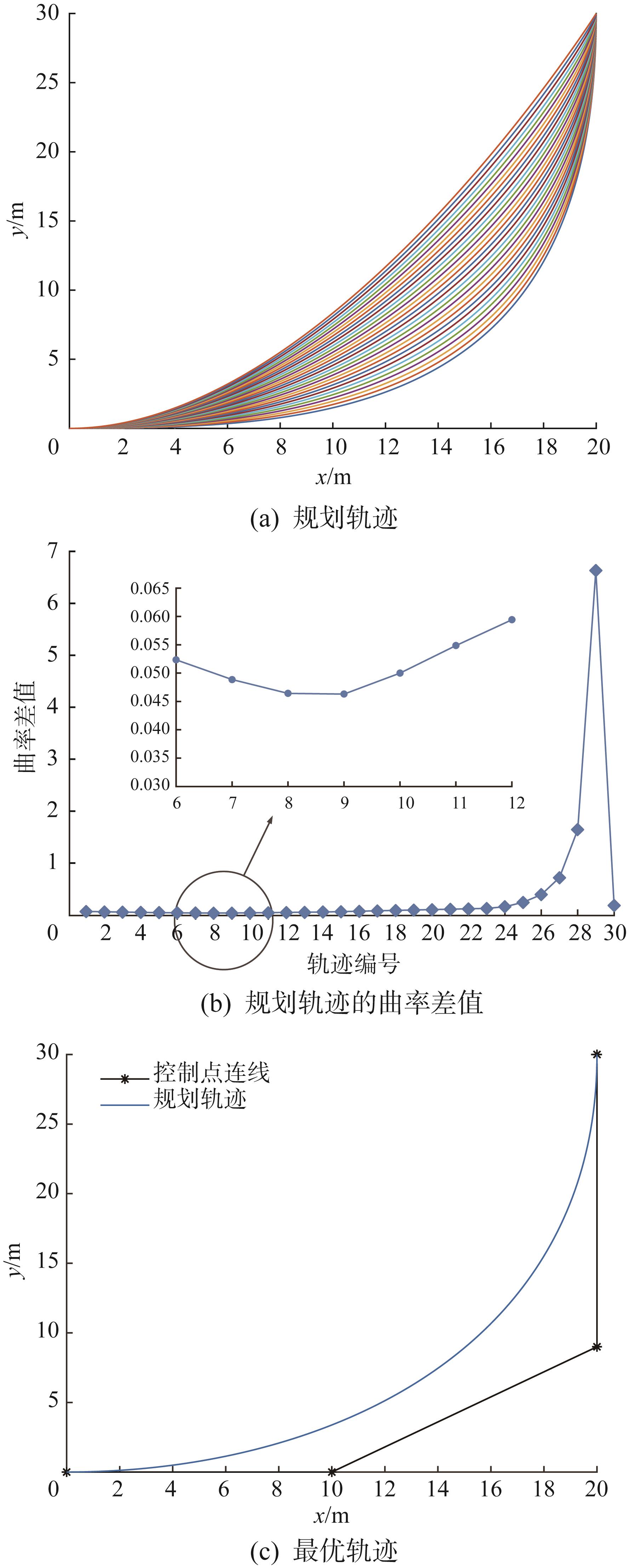
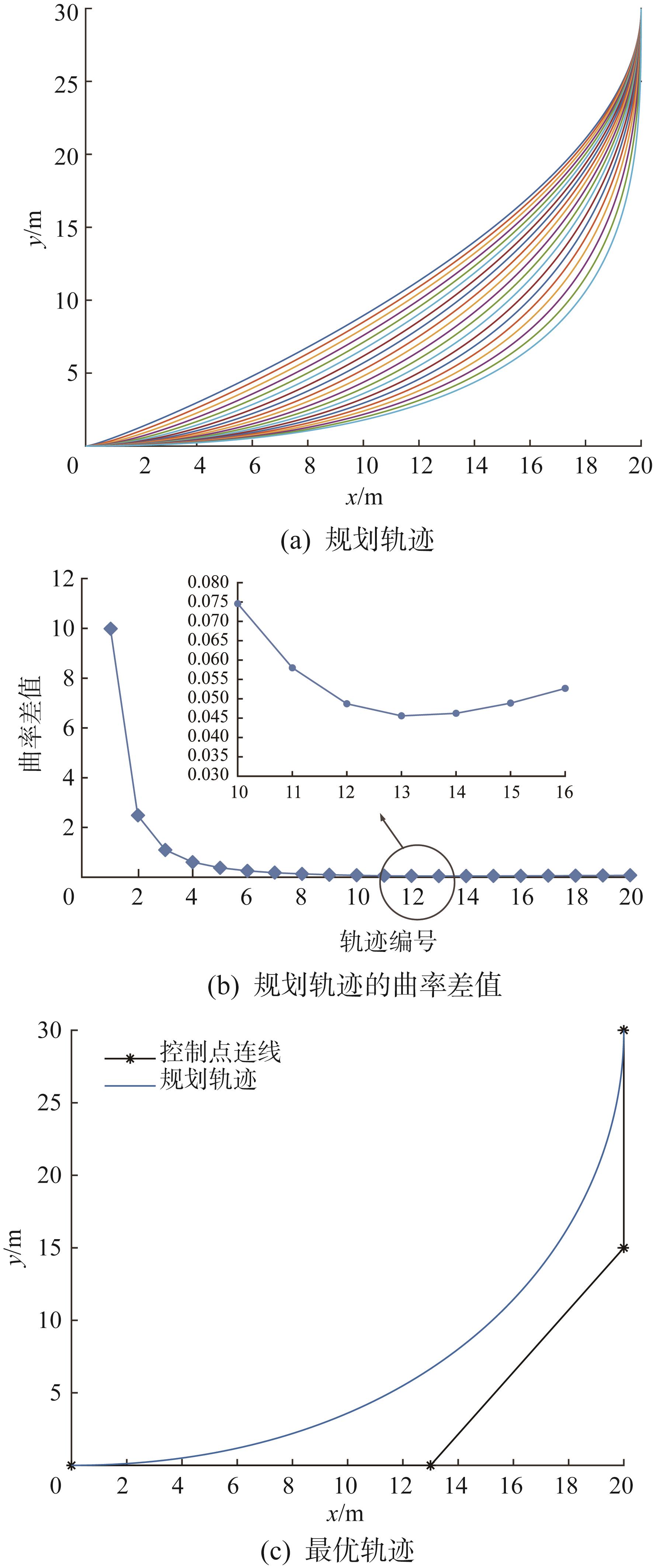
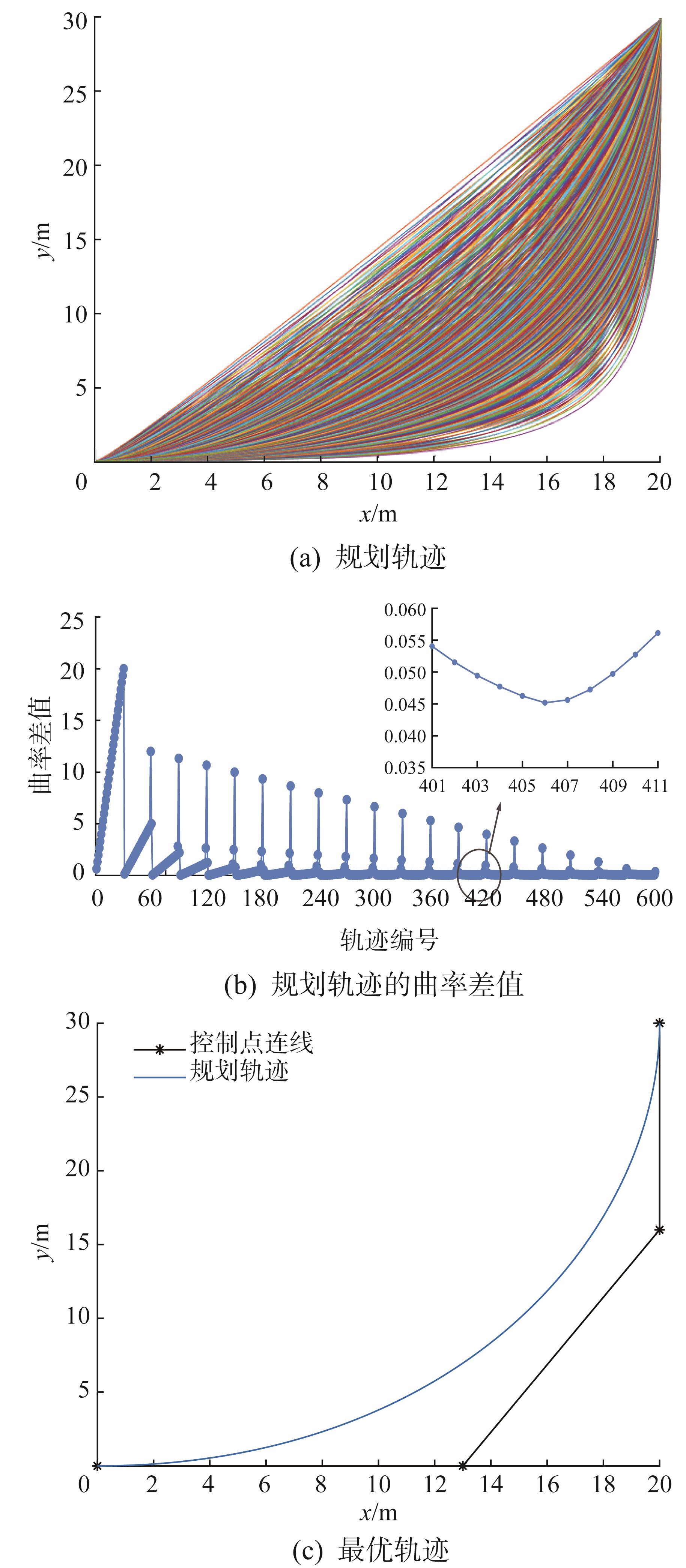
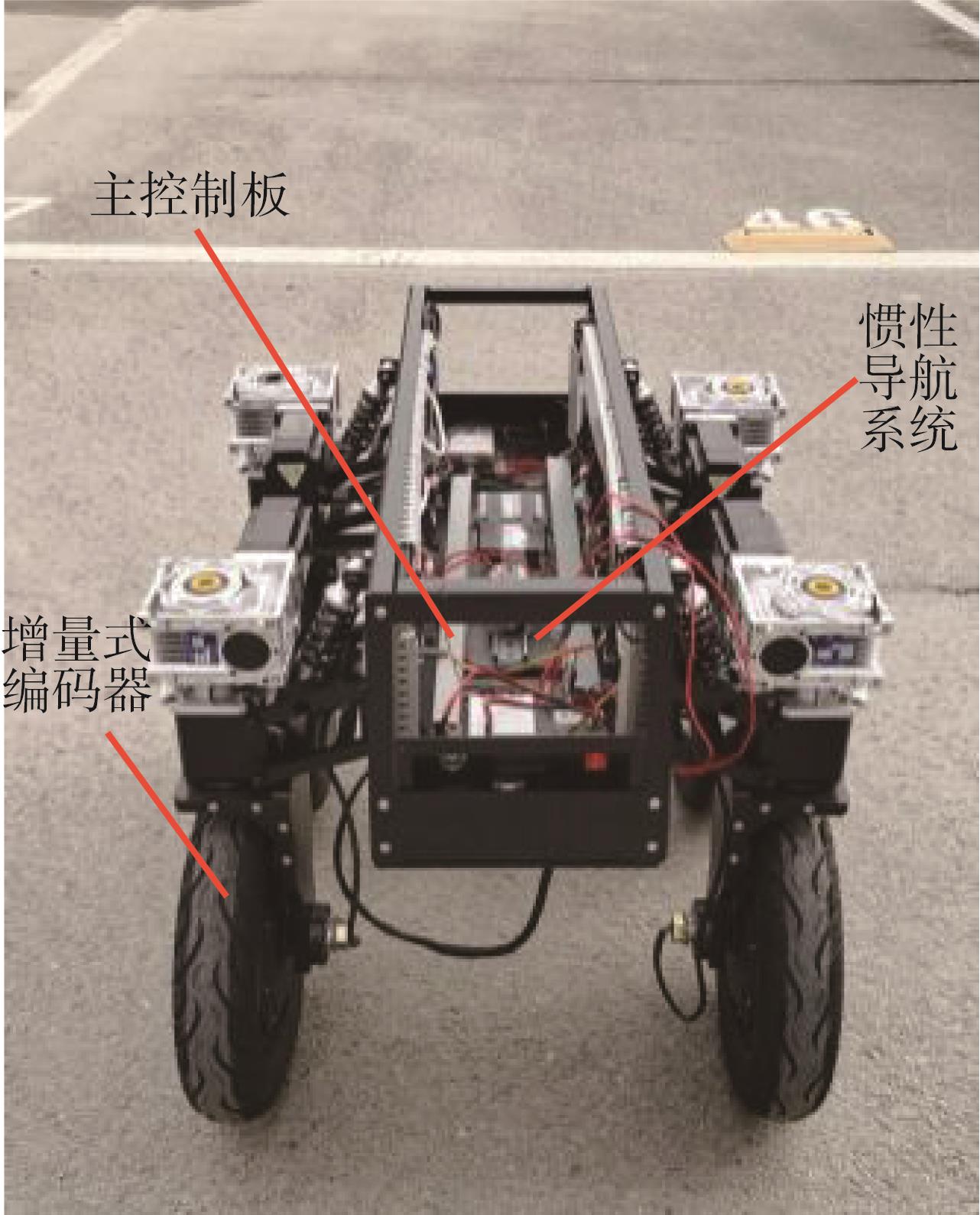
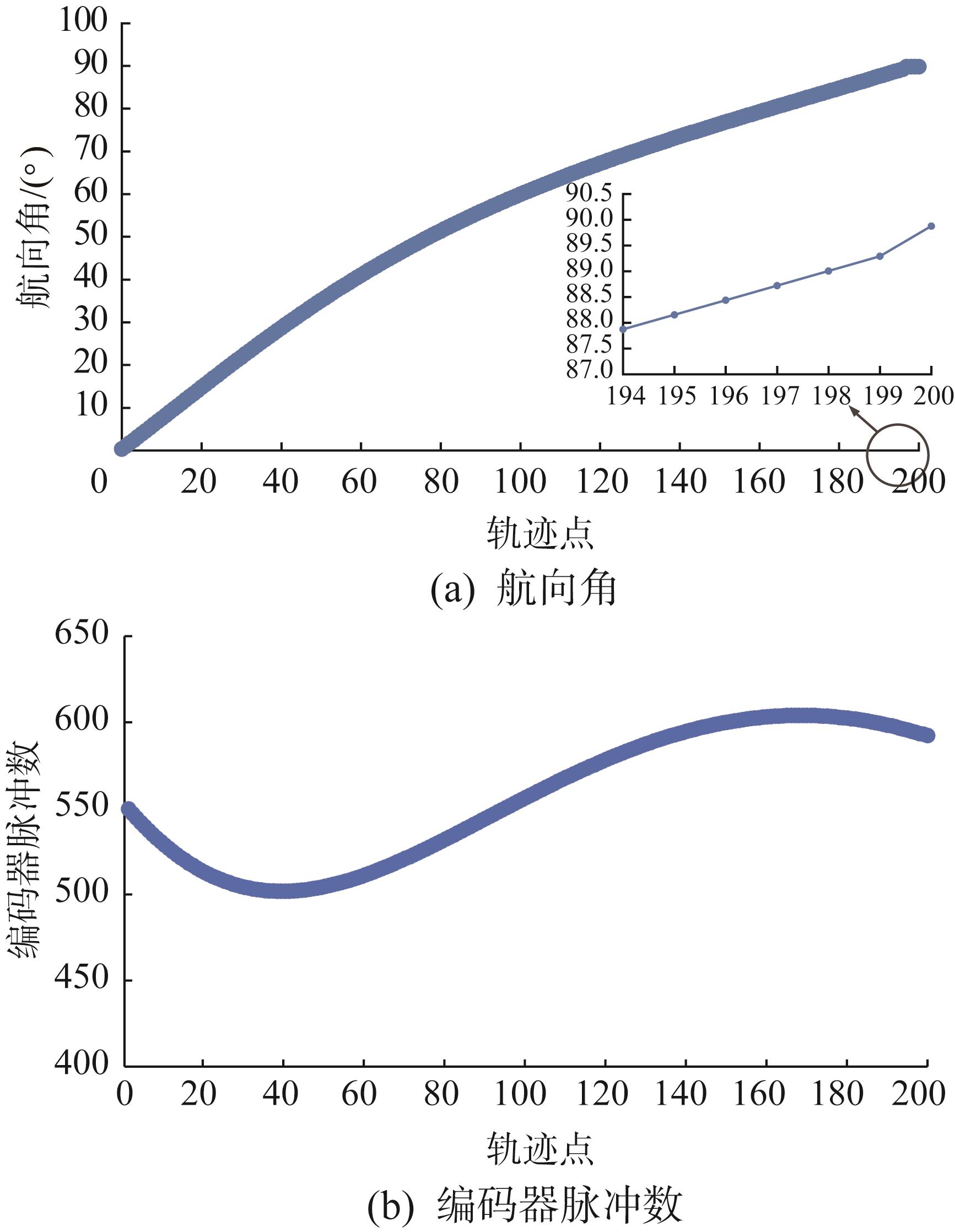
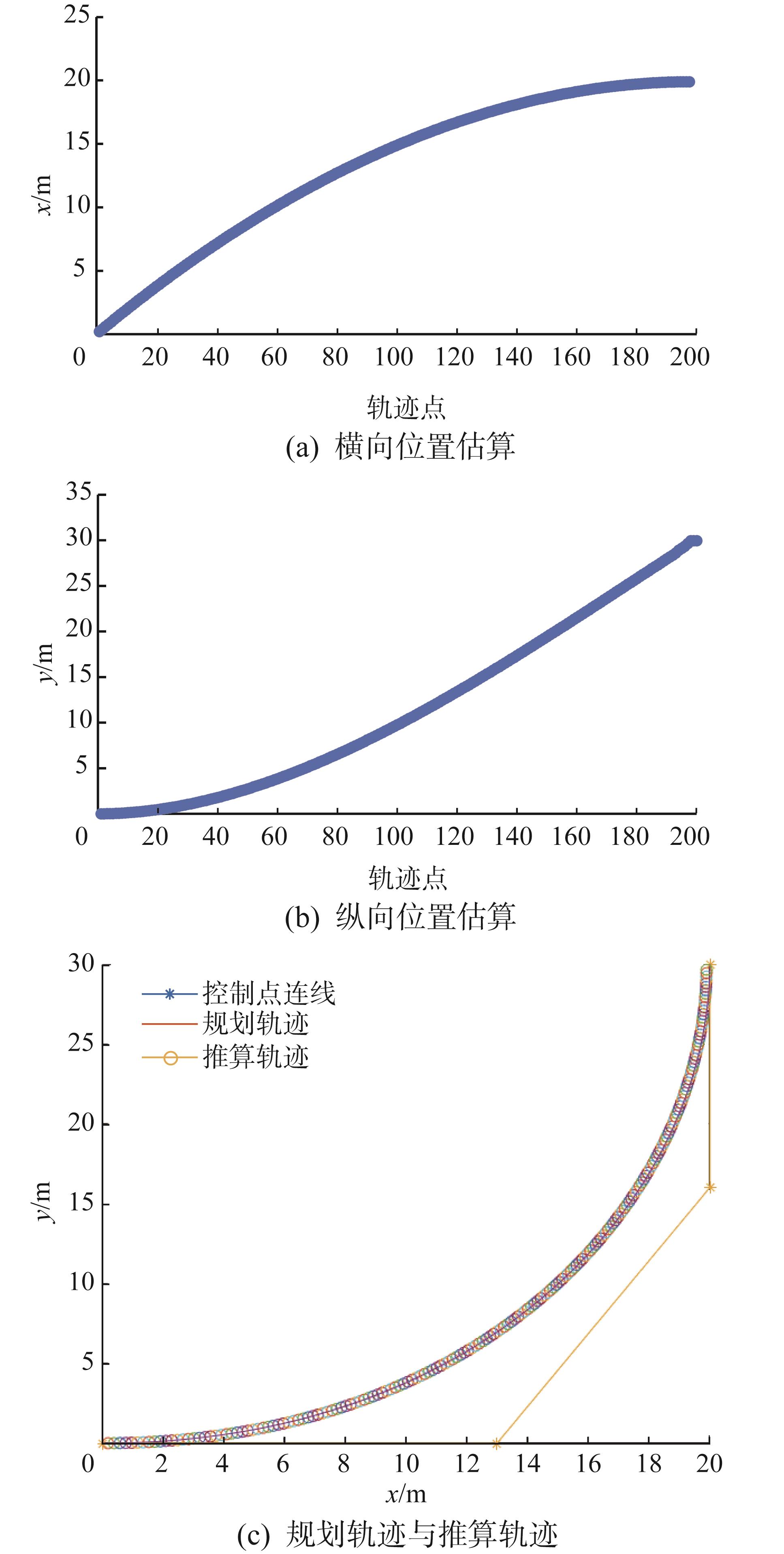
Abstract Aiming at the steering driving conditions of four-wheel independent drive and four-wheel independent steering (4WID-4WIS) intelligent vehicles, a new method for trajectory planning using third-order Bézier curve was proposed based on the Ackerman steering principle. Firstly, an optimal trajectory with minimum curvature difference was obtained by using the optimal function, which met the initial state constraints and target state constraints of intelligent vehicle and the curvature continuity constraints. Then, a position estimation algorithm was proposed, which calculated the position increment of intelligent vehicle based on the navigation angle measured by the inertial navigation system and the pulse number of encoder, so as to estimate its position during driving and calculate the driving trajectory length. Finally, the planned intelligent vehicle trajectory was simulated in the MATLAB software, and the rationality and feasibility of the trajectory planning method and position estimation algorithm were verified on the real vehicle test platform. The results showed that the 4WID-4WIS intelligent vehicle could drive to the given end point according to the planned trajectory, and its lateral position estimation error was 0.19%, the longitudinal position estimation error was 0.20% and the driving trajectory length calculation error was 0.22%; compared with other single algorithms such as mileage calculation method and ranging method, the proposed position estimation algorithm had high precision, which can provide reference for trajectory planning and position estimation of other mobile robots.
|
|
Received: 14 July 2021
Published: 06 May 2022
|
|
|
4WID-4WIS智能车阿克曼转向轨迹规划及位置估算
针对四轮独立驱动与四轮独立转向(four-wheel independent drive and four-wheel independent steering, 4WID-4WIS)智能车的转向行驶工况,基于阿克曼转向原理,提出一种利用三阶贝塞尔曲线进行轨迹规划的新方法。首先,采用最优函数获取一条满足智能车初始状态约束、目标状态约束和曲率连续约束且曲率差值最小的最优轨迹。然后,提出一种位置估算算法,即基于惯性导航系统测量的航向角和编码器的脉冲数对智能车的位置增量进行计算,从而估算其行驶时的位置,并推算运行轨迹的长度。最后,在MATLAB软件中对所规划的智能车轨迹进行仿真计算,并在实车试验平台上验证轨迹规划方法和位置估算算法的合理性和可行性。结果表明,4WID-4WIS智能车能够按规划的轨迹行驶到给定终点,其横向位置估算误差为0.19%,纵向位置估算误差为0.20%,运行轨迹长度推算误差为0.22%;相比于其他里程计算法、测距法等单一算法,所提出的位置估算算法的精度高,可为其他移动机器人的轨迹规划和位置估算提供参考。
关键词:
四轮独立驱动与四轮独立转向(4WID-4WIS),
阿克曼转向,
贝塞尔曲线,
轨迹规划
|
|
| [1] |
朱大奇,颜明重.移动机器人路径规划技术综述[J].控制与决策,2010,25(7):961-967. doi:10.13195/j.cd.2010.07.4.zhudq.014
ZHU Da-qi, YAN Ming-zhong. Survey on technology of mobile robot path planning[J]. Control and Decision, 2010, 25(7): 961-967.
doi: 10.13195/j.cd.2010.07.4.zhudq.014
|
|
|
| [2] |
陈靖辉,崔岩,刘兴林,等.基于改进A*算法的移动机器人路径规划方法[J].计算机应用研究,2020,37(S1):118-119.
CHEN Jing-hui, CUI Yan, LIU Xing-lin, et al. Path planning method for mobile robot based on improved A* algorithms[J]. Application Research of Computers, 2020, 37(S1): 118-119.
|
|
|
| [3] |
孙文彬,谭正龙,王江,等.基于多粒度通讯的Dijkstra并行算法优化[J].中国矿业大学学报,2014,43(5):938-943. doi:10.13247/j.cnki.jcumt.000226
SUN Wen-bin, TAN Zheng-long, WANG Jiang, et al. A parallel Dijkstra algorithm based on multi-granularity communication[J]. Journal of China University of Mining & Technology, 2014, 43(5): 938-943.
doi: 10.13247/j.cnki.jcumt.000226
|
|
|
| [4] |
LAMINI C, BENHLIMA L, ELBEKRI A. Genetic algorithm based approach for autonomous mobile robot path planning[J]. Procedia Computer Science, 2018, 127: 180-189. doi:10.1016/j.procs.2018.01.113
doi: 10.1016/j.procs.2018.01.113
|
|
|
| [5] |
马喜峰,张雷.基于对称极多项式曲线的移动机器人平滑路径生成[J].机器人,2005,27(5):450-454,459. doi:10.3321/j.issn:1002-0446.2005.05.015
MA Xi-feng, ZHANG Lei. Smooth path generation for mobile robots based on symmetrical polar polynomials[J]. Robot, 2005, 27(5): 450-454, 459.
doi: 10.3321/j.issn:1002-0446.2005.05.015
|
|
|
| [6] |
罗强,王海宝,崔小劲,等.改进人工势场法自主移动机器人路径规划[J].控制工程,2019,26(6):1091-1098. doi:10.14107/j.cnki.kzgc.170907
LUO Qiang, WANG Hai-bao, CUI Xiao-jin, et al. Autonomous mobile robot path planning based on improved artificial potential method[J]. Control Engineering of China, 2019, 26(6): 1091-1098.
doi: 10.14107/j.cnki.kzgc.170907
|
|
|
| [7] |
ELHOSENY M, THARWAT A, HASSANIEN A E. Curve based path planning in a dynamic field using modified genetic algorithm[J]. Journal of Computational Science, 2018, 25: 339-350. doi:10.1016/j.jocs.2017.08.004
doi: 10.1016/j.jocs.2017.08.004
|
|
|
| [8] |
郑天江,李俊杰,陈庆盈,等.基于三次B样条的移动机器人实时轨迹规划研究[J].制造业自动化,2017,39(5):4-7. doi:10.3969/j.issn.1009-0134.2017.05.002
ZHENG Tian-jiang, LI Jun-jie, CHEN Qing-ying, et al. A study of robot motion controller based on pure network[J]. Manufacturing Automation, 2017, 39(5): 4-7.
doi: 10.3969/j.issn.1009-0134.2017.05.002
|
|
|
| [9] |
张新峰,陈建伟,左思.基于贝塞尔曲线的智能商用车换道避障轨迹规划[J].科学技术与工程,2020,20(29):12150-12157. doi:10.3969/j.issn.1671-1815.2020.29.048
ZHANG Xin-feng, CHEN Jian-wei, ZUO Si. Trajectory planning for intelligent commercial vehicle obstacle avoidance based on quartic Bézier curve[J]. Science Technology and Engineering, 2020, 20(29): 12150-12157.
doi: 10.3969/j.issn.1671-1815.2020.29.048
|
|
|
| [10] |
陈成,何玉庆,卜春光,等.基于四阶贝塞尔曲线的无人车可行轨迹规划[J].自动化学报,2015,41(3):486-496. doi:10.16383/j.aas.2015.c140295
CHEN Cheng, HE Yu-qing, BU Chun-guang, et al. Feasible trajectory generation for autonomous vehicles based on quartic Bézier curve[J]. Acta Automatica Sinica, 2015, 41(3): 486-496.
doi: 10.16383/j.aas.2015.c140295
|
|
|
| [11] |
JOLLY K G, KUMAR S R, VIJAYAKUMAR R. A Bezier curve based path planning in a multi-agent robot soccer system without violating the acceleration limits[J]. Robotics and Autonomous Systems, 2009, 57(1): 23-33. doi:10.1016/j.robot.2008.03.009
doi: 10.1016/j.robot.2008.03.009
|
|
|
| [12] |
高嵩,张金炜,戎辉,等.基于贝塞尔曲线的无人车局部避障应用[J].现代电子技术,2019,42(9):163-166. Doi:10.16652/j.issn.1004-373x.2019.09.038
GAO Song, ZHANG Jin-wei, RONG Hui, et al. Application of unmanned vehicle local obstacle avoidance method based on Bezier curve[J]. Modern Electronics Technique, 2019, 42(9): 163-166.
doi: 10.16652/j.issn.1004-373x.2019.09.038
|
|
|
| [13] |
刘学问,陶钧,徐海巍.基于三阶贝塞尔曲线的AGV轨迹规划研究[J].工业控制计算机,2018,31(1):113-114. doi:10.3969/j.issn.1001-182X.2018.01.047
LIU Xue-wen, TAO Jun, XU Hai-wei. Feasible trajectory generation for AGV based on cubic Bézier curve[J]. Industrial Control Computer, 2018, 31(1): 113-114.
doi: 10.3969/j.issn.1001-182X.2018.01.047
|
|
|
| [14] |
刘望城,王留召.基于贝塞尔曲线法线的太阳圆心求取方法[J].测绘与空间地理信息,2021,44(7):189-192,201. doi:10.3969/j.issn.1672-5867.2021.07.049
LIU Wang-cheng, WANG Liu-zhao. Method to calculate the center of the sun based on the normal lines of the Bézier curve[J]. Geomatics & Spatial Information Technology, 2021, 44(7): 189-192, 201.
doi: 10.3969/j.issn.1672-5867.2021.07.049
|
|
|
| [15] |
崔根群,胡可润,唐风敏.融合遗传贝塞尔曲线的智能汽车路径规划[J].现代电子技术,2021,44(1):144-148. doi:10.16652/j.issn.1004-373x.2021.01.030
CUI Gen-qun, HU Ke-run, TANG Feng-min. Intelligent vehicle path planning based on genetic algorithm and Bézier curve[J]. Modern Electronics Technique, 2021, 44(1): 144-148.
doi: 10.16652/j.issn.1004-373x.2021.01.030
|
|
|
| [16] |
郑亮,孙龙龙,陈双.一种改进工业自动导引车路径规划算法[J].科学技术与工程,2021,21(16):6758-6763. doi:10.3969/j.issn.1671-1815.2021.16.033
ZHENG Liang, SUN Long-long, CHEN Shuang. An improved industrial automated guided vehicle path planning algorithm[J]. Science Technology and Engineering, 2021, 21(16): 6758-6763.
doi: 10.3969/j.issn.1671-1815.2021.16.033
|
|
|
| [17] |
向秀娟,袁亮,姜道伟.双轮差速驱动式室内移动机器人的改进航迹推算方法[J].机床与液压,2016,44(11):8-11,23. doi:10.3969/j.issn.1001-3881.2016.11.002
XIANG Xiu-juan, YUAN Liang, JIANG Dao-wei. Improved dead reckoning method for two-wheel differential driving interior mobile robot[J]. Machine Tool & Hydraulics, 2016, 44(11): 8-11, 23.
doi: 10.3969/j.issn.1001-3881.2016.11.002
|
|
|
| [18] |
张利,潘承毅,刘征宇,等.差动驱动机器人的一种航迹推算定位方法[J].合肥工业大学学报,2010,33(11):1605-1608,1622. doi:10.3969/j.issn.1003-5060.2010.11.002
ZHANG Li, PAN Cheng-yi, LIU Zheng-yu, et al. A new method of dead reckoning for differential drive mobile robots[J]. Journal of Hefei University of Technology, 2010, 33(11): 1605-1608, 1622.
doi: 10.3969/j.issn.1003-5060.2010.11.002
|
|
|
| [19] |
李雪茹,王禹林,欧屹,等.三轮全向移动机器人的航迹推算定位方法[J].兵工自动化,2017,36(5):62-65. doi:10.7690/bgzdh.2017.05.017
LI Xue-ru, WANG Yu-lin, Yi OU, et al. Dead reckoning positioning method of 3 wheels omnidirectional mobile robot[J]. Ordnance Industry Automation, 2017, 36(5): 62-65.
doi: 10.7690/bgzdh.2017.05.017
|
|
|
| [20] |
周婧,陈庙红,吴豪杰.基于惯性导航的平面航迹推算的研究[J].计算机科学,2017,44(6A):582-586. doi:10.11896/j.issn.1002-137X.2017.6A.131
ZHOU Jing, CHEN Miao-hong, WU Hao-jie. Research on plane dead reckoning based on intertial navigation system[J]. Computer Science, 2017, 44(6A): 582-586.
doi: 10.11896/j.issn.1002-137X.2017.6A.131
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|